2.1. Partial Discharge in GIS
GIS, which includes a circuit breaker, disconnector, grounding switch, transformer, and bus, has been widely used due to its low maintenance, high reliability, and compact size. PD refers to the discharge phenomenon occurring in the partial area of the insulator which does not penetrate the conductor under voltage. Under a strong electric field, the insulation defects of GIS will lead to PD, accompanied by the generation of electricity, light, heat, sound, ozone, and nitric oxide, which will corrode the insulating materials. In addition, the charged particles produced by PD will impact the insulating materials. PD is a sign of insulation degradation in GIS, which endangers the safety of equipment and even the power system.
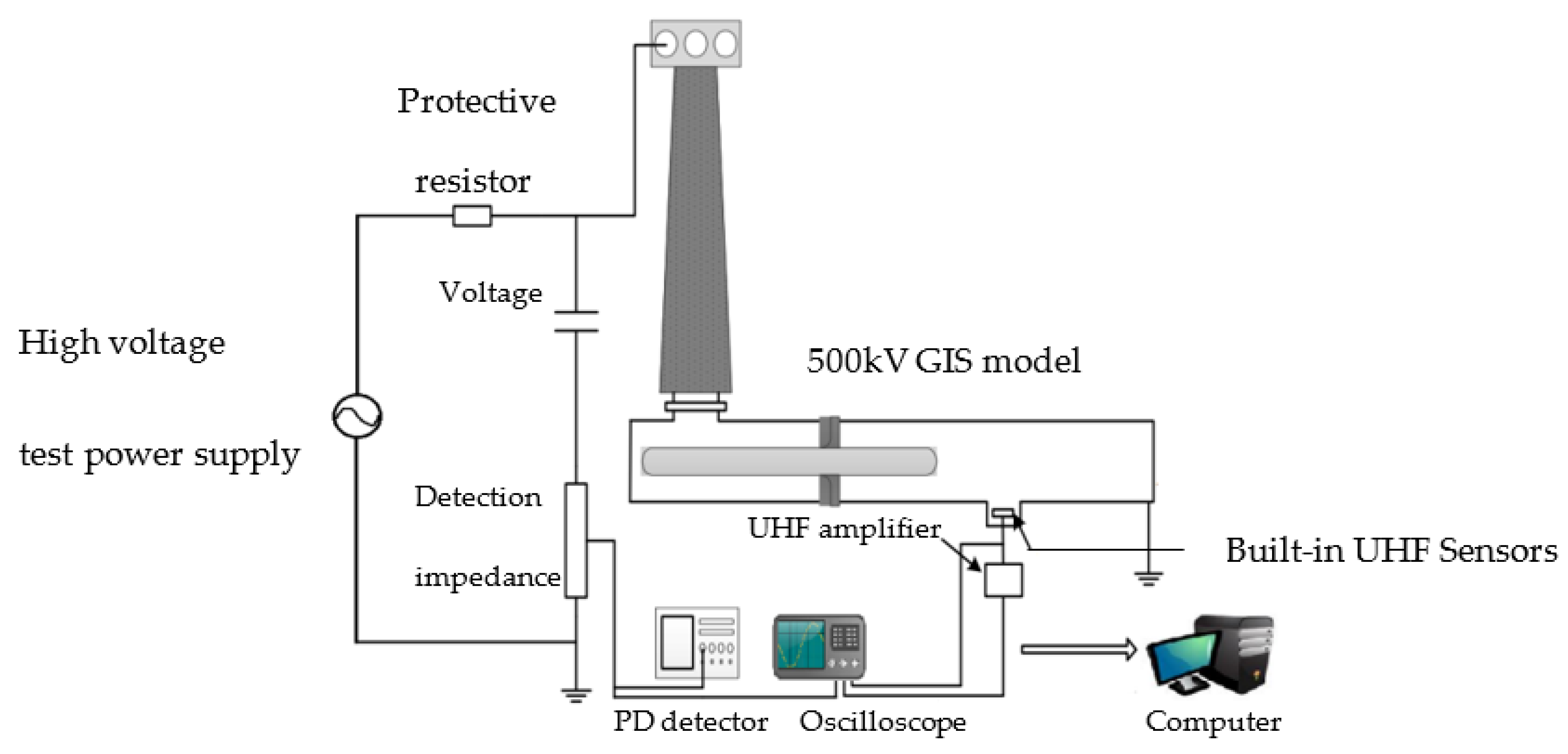
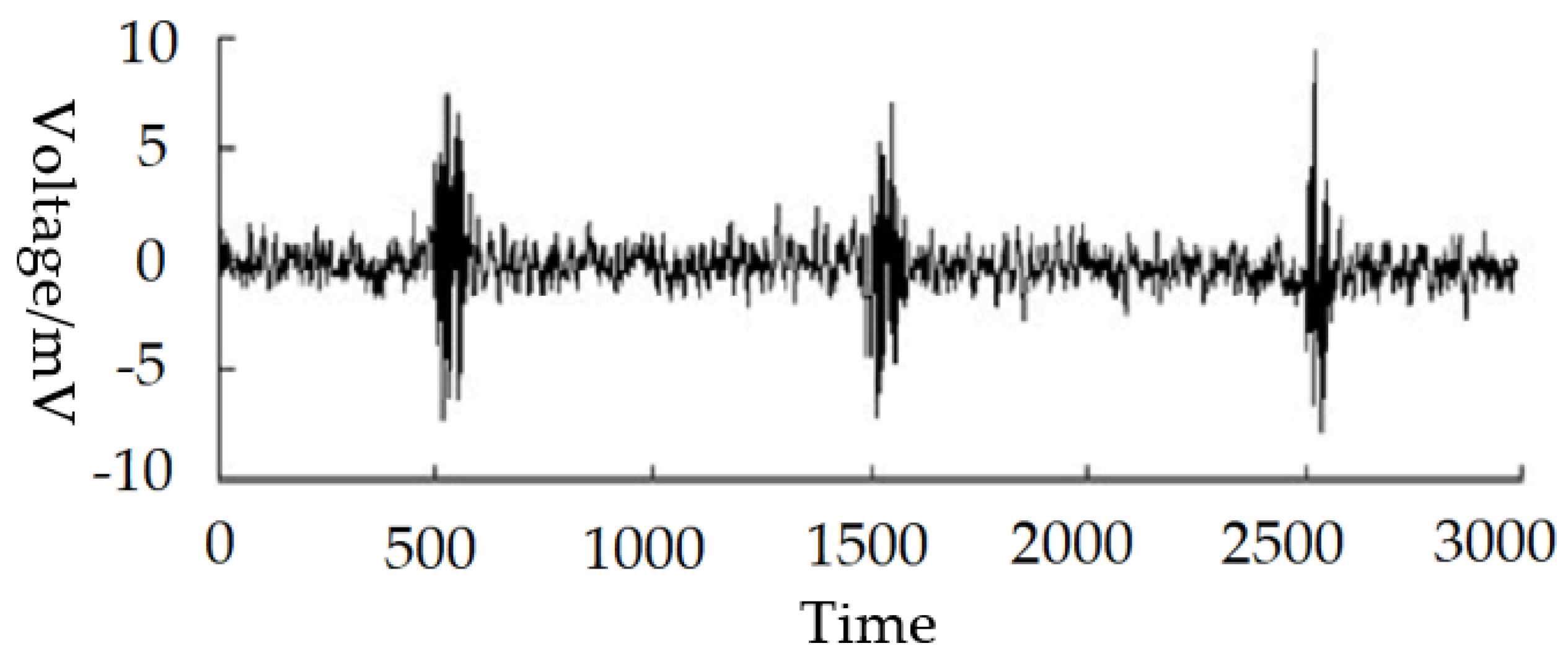
The breakdown field strength of insulators in power equipment is very high. When PD occurs in a small range, the breakdown process is very fast, which produces steep pulse current. Its rising time is less than 1 ns, and ultra-high frequency (UHF) electromagnetic waves are excited. The principle of the UHF method for PD detection is to detect the UHF electromagnetic waves (300 MHz‒3 GHz) generated by PD in power equipment by UHF sensor. Then, the information of PD can be obtained. Built-in UHF sensors and external UHF sensors are usually used for UHF methods.
Because corona interference is mainly concentrated below the 300 MHz frequency band, the UHF method can effectively avoid corona interference. It has high sensitivity and anti-interference ability. Naturally, the optimal placement of UHF sensors and location method become the key to partial discharge locating.
2.2. Optimal Placement of UHF Sensors
The optimal placement of UHF sensors should satisfy the economy of scale and provide maximum observability. A necessary requirement for successful locating is that at least two sensors detect an effective discharge EM wave, and the EM wave must pass through both ends of the discharge section. If the EM wave only passes through the head or the end of the detecting section, the locating will fail. 1 represents that the sensor needs to be installed and 0 represents the sensor doesn’t need to be installed. Therefore, the placement of UHF sensors can be abstracted as a 0-1 programming model.
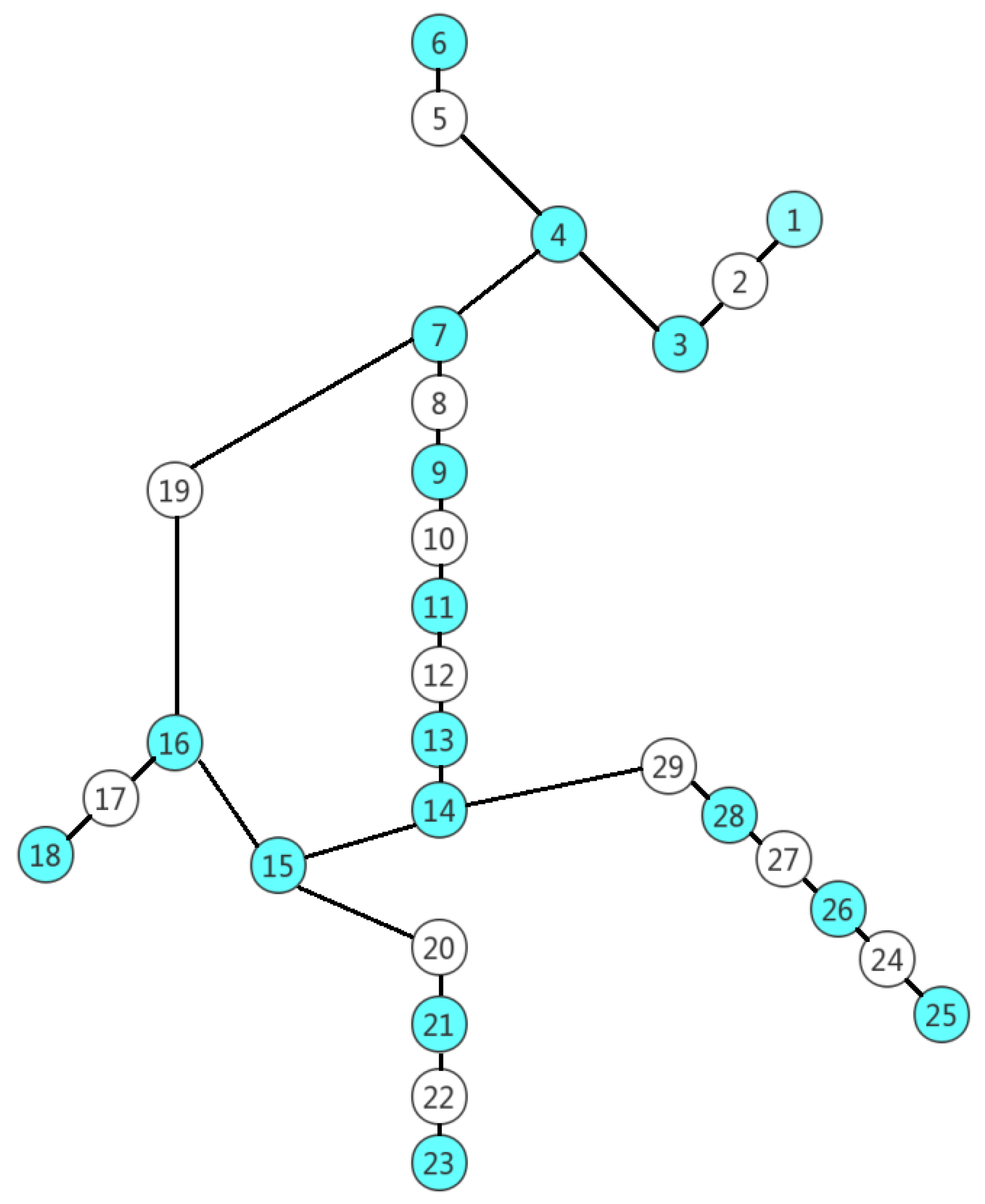
The EM wave will be attenuated when passing through the insulators and L-type and T-type structures in GIS. The vertical branches of L-type structures and T-type structures significantly attenuate the EM wave, and the attenuation caused by the horizontal branches of T-type structures and insulators comes after. In order to improve the detection sensitivity and locating reliability, the L-type structures and the T-type structures in GIS should be taken into consideration.
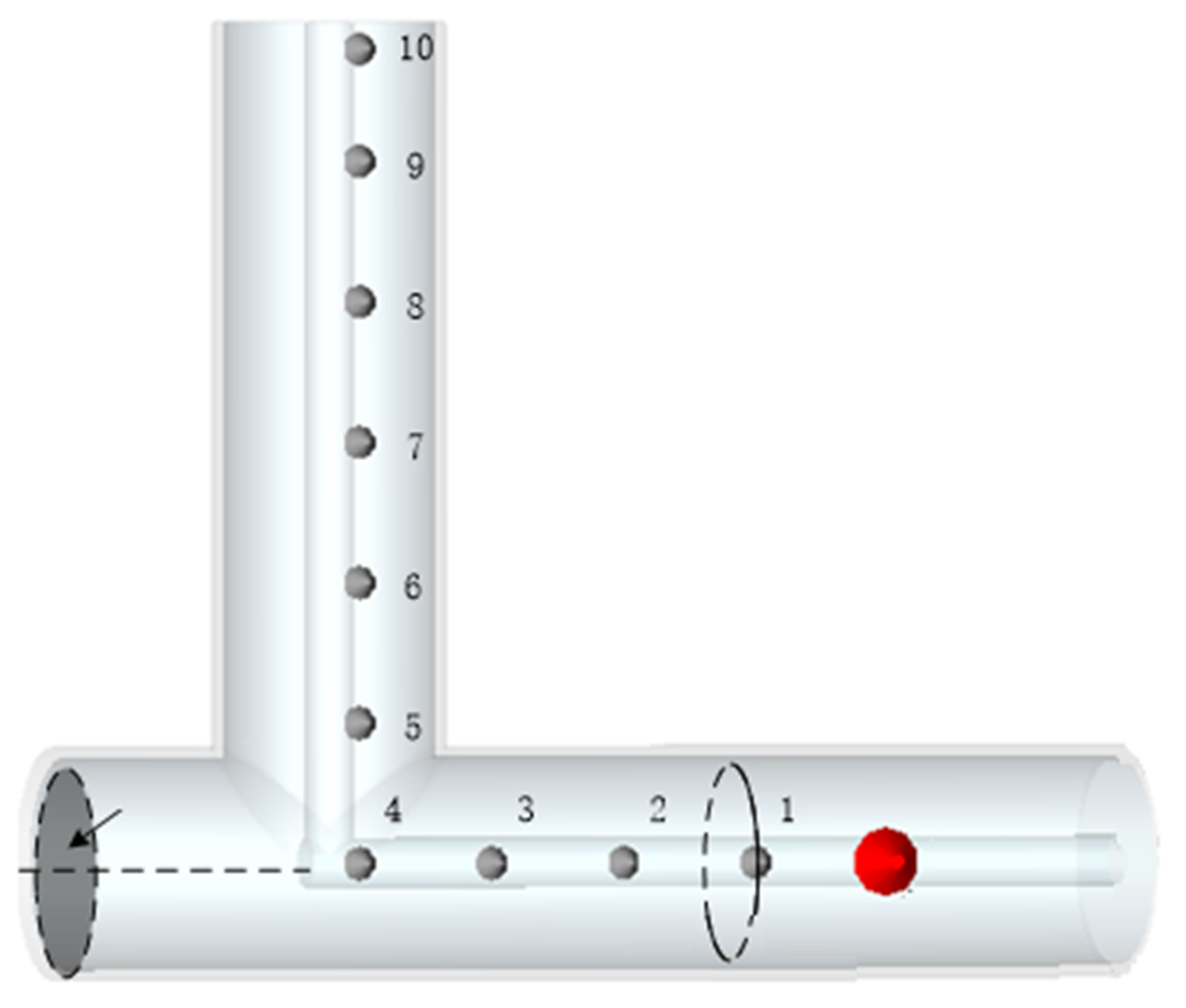
In topology, the number of branches connected to the node is called the degree (
d) of the node. Obviously, the degree of an L-type node (node 4 in
Figure 1) is 2 and the degree of a T-type node (node 4 in
Figure 2) is 3. For general GIS, the node with the largest degree is the cross node, of which the degree is 4, and the node with the smallest degree is the terminal node, of which the degree is 1. The cross node can be considered as the combination of two L-type nodes. To effectively detect the EM wave of PD, the EM wave should not pass through more than one L-type node, one cross node, or one T-type node. These three nodes are collectively called the nonterminal node, of which the degree is greater than or equal to 2.
The number of branches included in the shortest path of node
i to node
j is defined as the shortest path length
Pij. Under the condition of installing sensors at the terminal node (subject to
xt = 1), a suitable nonterminal node should be selected to install a sensor so that the EM wave passes through, at most, one nonterminal node before reaching the sensors. Therefore, the maximum number of nonconfigurable nodes between any adjacent configurable nodes is 1, and
Pij should be no more than 2 (subject to
Pij = 2). An optimization model can be obtained:
where
t is terminal node,
i and
j are adjacent nodes, and
xk is the node in which the sensor should be installed. Because the configurable node is unknown, the inequality constraint of the shortest path which contains variable
xk cannot be obtained directly.
The condition above can be described as follows: at least one sensor should be installed on those nodes of which the shortest path length to node k is 1 or 2.
For a node
k, an adjacent node matrix
Vk is proposed.
Vk is
M ×
N matrix, where
N is the number of nodes and
M is the number of the nodes, of which the shortest path length to the node
k is 2. The nodes of which the shortest path length is 1 don’t need to be considered because the shortest path from these
M nodes to the node
k includes them. For a row vector
v of
Vk and
j (1 ≤
j ≤
N), when
Pkj = 1 or
Pkj = 2,
vj = 1 and other elements are 0. Therefore, it forms the constraint that at least one sensor should be installed on the path from the node
k to the node of which the shortest path length is 2.
V1~N is arranged in columns to form a new matrix
VM×N, and it can be found as follows:
where
XT = [
x1,
x2, …,
xN] is the vector to be solved and
IM×1 is [1, 1, …, 1]
T.
Reference [
27] has proposed the critical point of EM wave propagation. When the values of the critical points are only 0 or 1, the maximum observability can be achieved. The critical points divide the whole system into several sections.
R detectable sections are produced; then, the propagation path of the EM wave can be obtained by the topological structure and section length of the GIS. Therefore, a constraint can be found to be
where
G is the propagation path matrix of EM wave of each section and the constraint shows that at least one path of the EM wave to the node where the sensor is installed passes through both ends of the section and
I2R×1 = [1, 1, …, 1]
T.
By Equations (2) and (3), the 0-1 optimization model can be obtained:
where
WT = [
w1,
w2, …,
wN] is a weight vector and represents the tendency of each node to install a sensor. The elements values of
WT are between 0 and 1. The equation constrains whether if a sensor should be installed at a certain node. If it should be installed at the node
k,
B(
k,
k) = 1 and
b(
k) = 1, otherwise
B(
k +
N,
k) = 1. The remaining elements in
B and
b are 0. The model conforms to the standard form of the 0-1 programming model and it can be solved by using
brintprog tool in MATLAB.
2.3. Initial PD Location Method
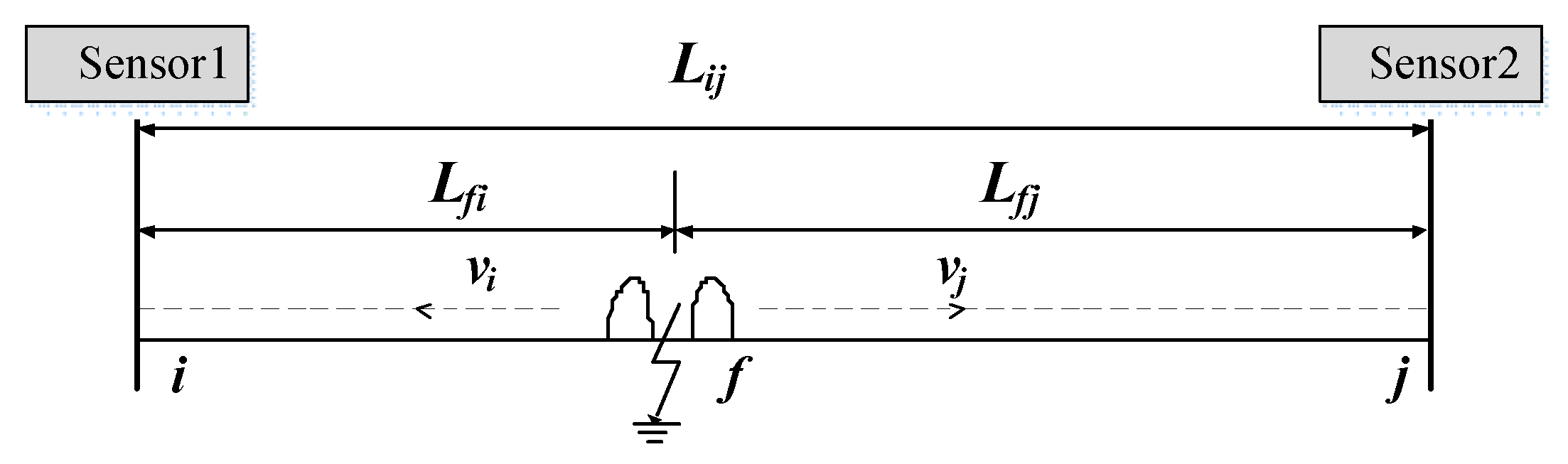
The time difference of arriving location method for GIS is based on the arriving time of the EM signals detected by UHF sensors installed at both ends of the PD section. Considering the outer radius of the cavity of GIS is much smaller than its total length, it can be assumed that the EM wave will travel along the path as the pattern in
Figure 3 after PD occurs.
For
Figure 3,
vi =
vj =
c = 0.3 m/ns is the propagation velocity of the EM wave, and the fault distance from the PD position to sensor 1 is given by
where
Lfi and
Lfj are the distance from the PD position to
I and to
j,
ti and
tj are the time when sensor
I and sensor
j detect the signals. Equation (5) is a conventional PD location method, and the PD signals can propagate to other sensors through
I and
j. In view of the integrity of GIS, the propagation velocity of EM wave can be considered as remaining constant. This method lays a foundation for accurate PD locating using multiple sensors in GIS.
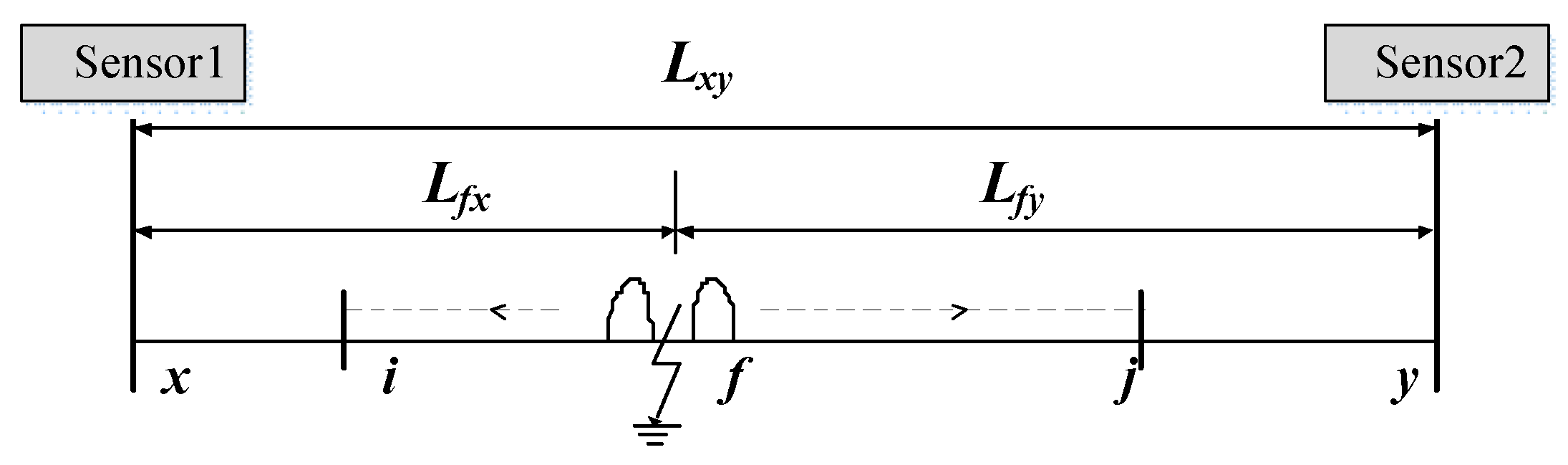
Figure 3 can be expanded to
Figure 4 below, and the EM waves travel through
I and
j to adjacent sensor
x and
y. Replacing
I and
j with
x and
y in Equations (5) and (6), the distance of extended TDOA can be expressed as
Similarly, taking x and j or i and y as the ends of section, the corresponding PD position can be obtained. The extended TDOA method is the basic principle for PD locating of complex GIS. The accurate timing of optical fiber connection and the synchronization of different sampling units to picoseconds are the basis of PD locating among multiple sensors.
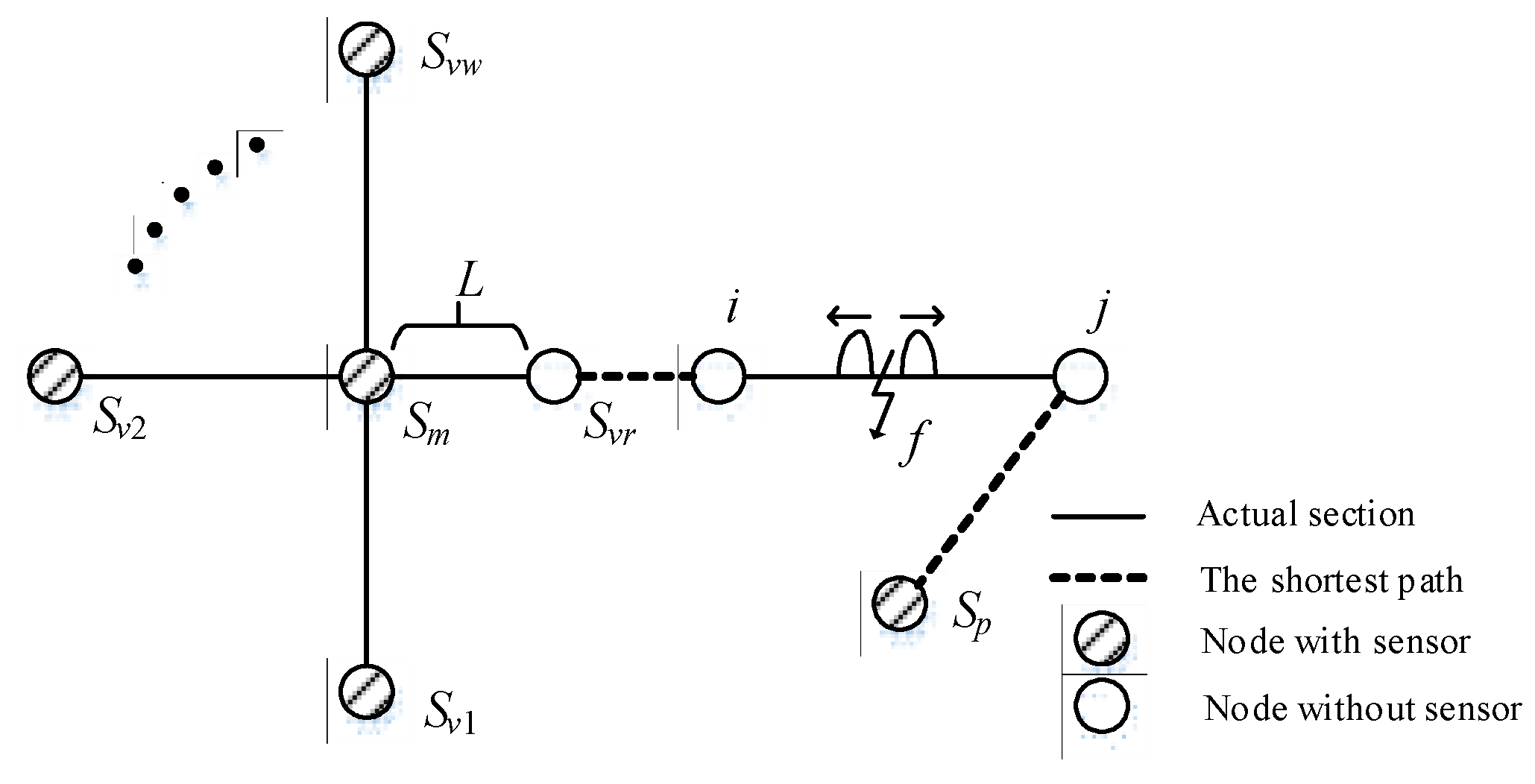
By the optimization Equation (4), it is assumed that
P UHF sensors are installed at the nodes
S = [
S1S2S3…
SP] of a GIS. After PD occurs, the arriving time of the EM waves detected by the UHF sensors is
TM = [
T1T2T3…
TP]
T and the minimum time in
TM is
Tmin. For a node
Sm in
S, all adjacent nodes are
SV = [
SvSv2Sv3…Svw], where
w is the number of adjacent nodes. In
Figure 5,
Svr can be any node in
SV.
The UHF sensors at Sm and Sp form a time difference location combination when PD occurs between i and j, and the shortest path between the two nodes must pass through an adjacent section L of Sm. The other end of L is the node Svr. For Sm and its adjacent node matrix SV, w TDOA location combinations can be obtained. For the UHF sensor arrangement matrix S, P – 1 combinations can be obtained. Therefore, the approximate solution can be obtained by comparing the similarity between the transmission time of the EM wave from the PD position to the sensors and the arriving time of the EM wave acquired by sensors synchronously.
The Euclidean distance is used to compare the similarity between two vectors. The Euclidean distance can magnify the error caused by sensor communication and data processing. It is suitable for comparing the unknown quantity with the known quantity with possible error and detecting redundancy. The value of the Euclidean distance is inversely proportional to the similarity between the two sets of data. The more similar the two sets of data are, the smaller the value is. Therefore, the initial locating results of PD can be obtained.
By the shortest path algorithm, the time matrix
Df of the EM waves propagating from the
w × (
P – 1) positions to UHF sensors can be found as
where the matrix element
Dij = [
D1′ D2′… DP’]. Furthermore, the distance measure matrix
E can be built as
The initial PD location result is given by the minimum value in the measure matrix E, and the corresponding PD position can be expressed as f′.
2.4. Accurate PD Location Method for GIS
The accuracy of PD locating can be improved by using the information of all UHF sensors installed in GIS. From the initial PD position and the inherent topological structure of GIS, the time of PD occurrence can be calculated. Then, the time of the EM wave propagating to UHF sensors is calculated by the time of PD occurrence and the EM wave velocity to obtain multiple sets of PD location results. With these results, accurate PD locating can be achieved.
The occurring time
t0 of PD can be found to be
where
Lbf’ is the distance from the PD position to the UHF sensor corresponding to
Tmin. By
t0, the distance matrix of the PD signals propagating to each sensor can be calculated to be
where
η = [1 1 ⋯ 1]
TP×1. According to the topological structure of GIS, the PD positions can be found:
In combination with all the information of UHF sensors, the accurate PD position can be found as follows:
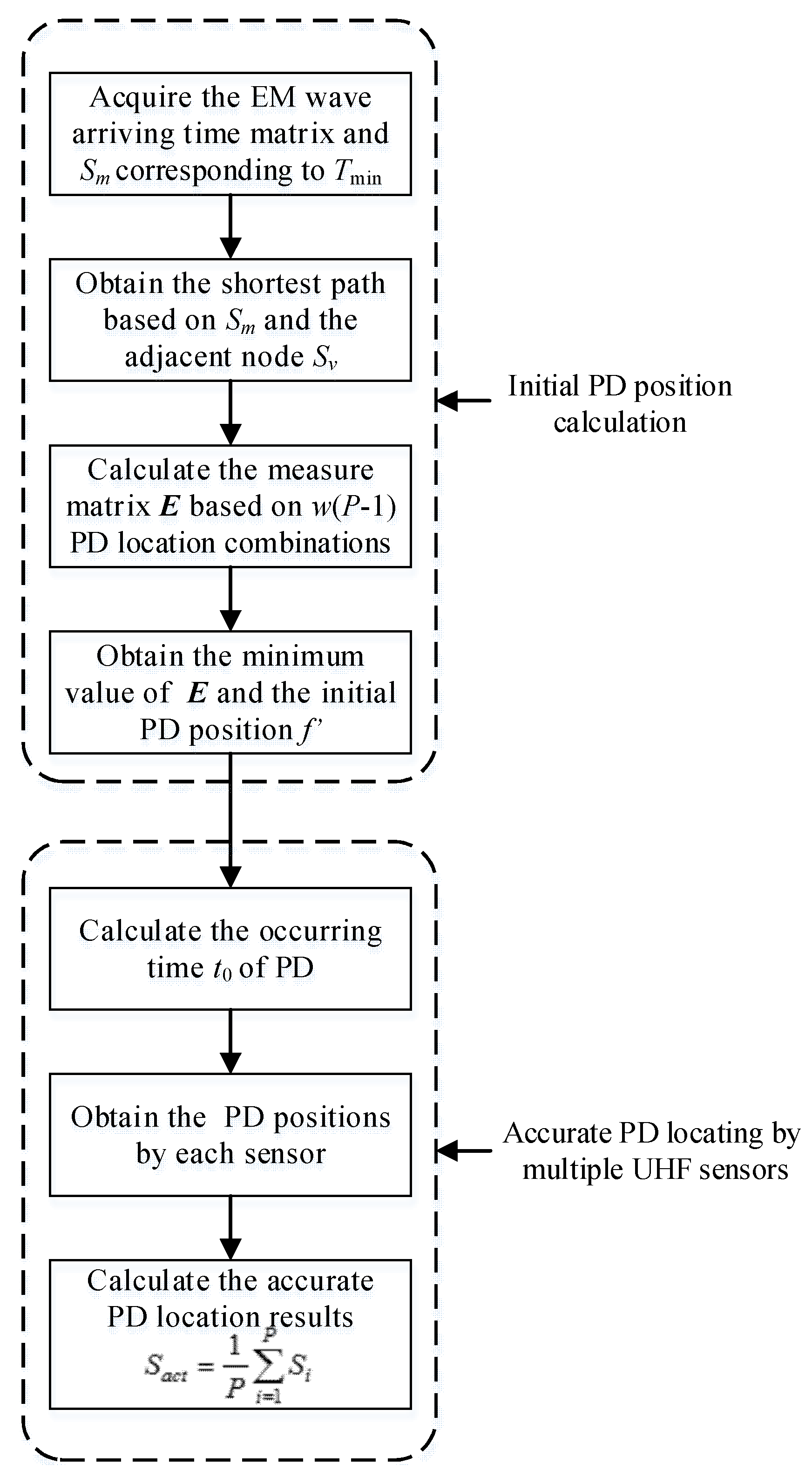
The flow chart of the PD location method for GIS and the steps are as follows (shown in
Figure 6):
- 1)
Acquire the EM wave arriving time matrix TM = [T1T2T3…TP]T and the corresponding node matrix S = [S1S2S3…SP] from UHF sensors after PD occurs.
- 2)
Based on Sm corresponding to Tmin, w × (P – 1) PD location combinations are composed of w adjacent nodes and P – 1 UHF sensors.
- 3)
The initial PD position can be calculated by the measure matrix E, and the occurring time t0 of PD can be found.
- 4)
Combining t0 with the topology structure of GIS, the PD position can be revised by multiple sensors of the GIS to obtain the accurate PD location results.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}