A New Method of Determination of the Angle of Attack on Rotating Wind Turbine Blades


Abstract
:
1. Introduction
2. Definitions of Effective AoA and Nominal AoA
3. Method of Computing Self-Induction
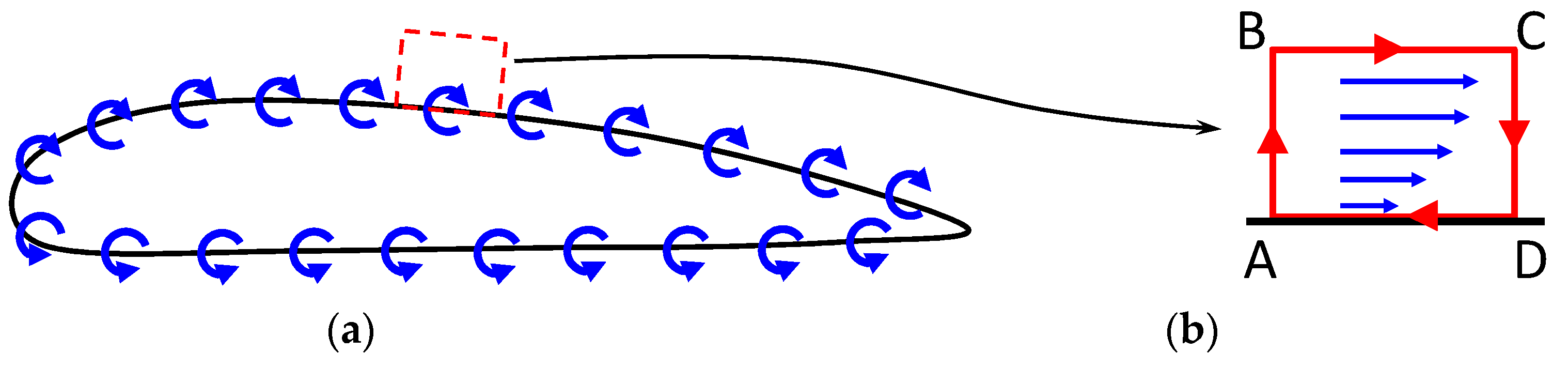
3.1. Representing Airfoil by Distributed Vortices
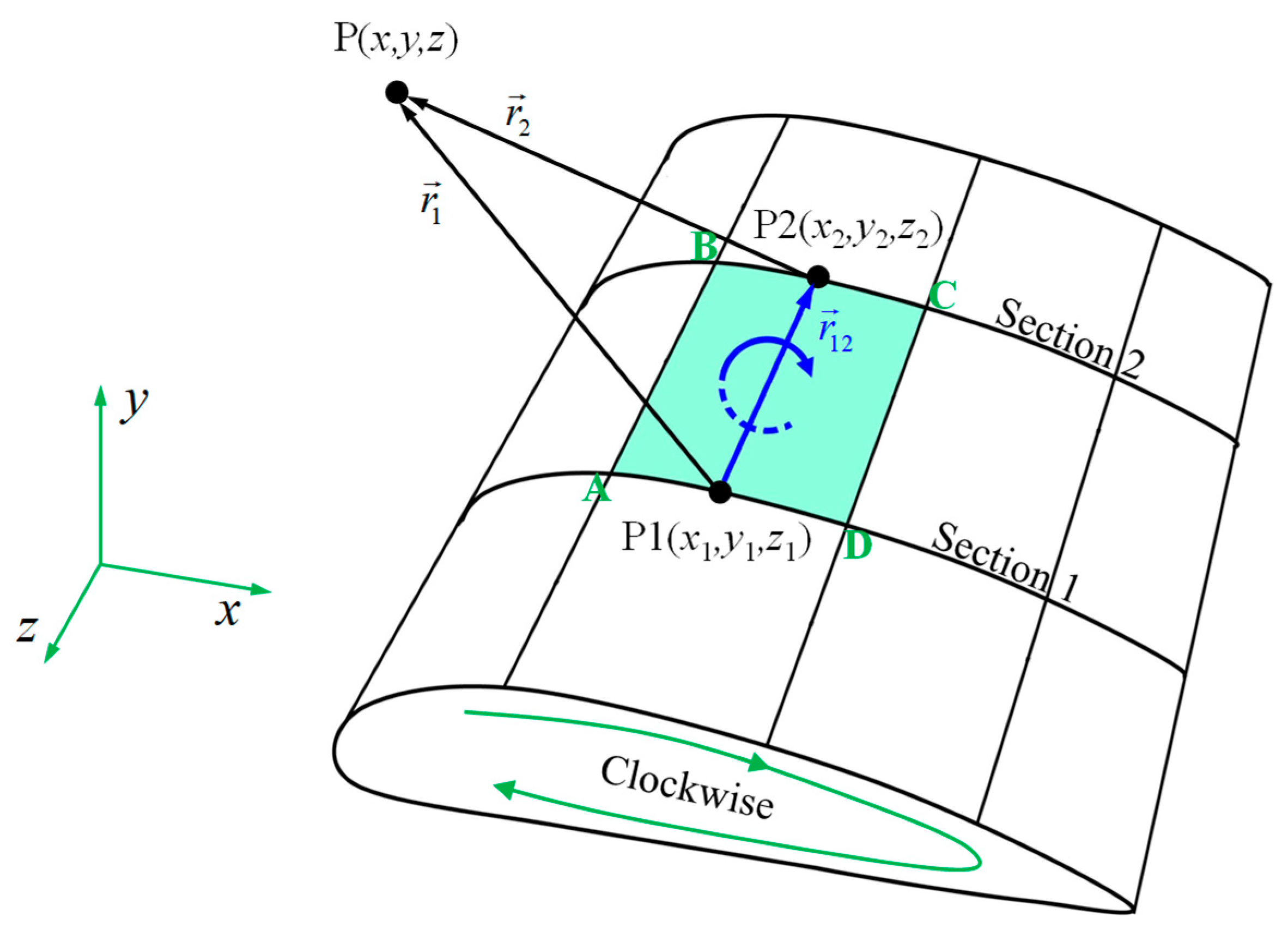
3.2. Representing Blade by Distributed Vortices
4. Subtraction of Blade Self-Induction
5. Determination of Effective AoA
6. Comparison and Validation
6.1. Comparison Between Nominal AoA and Effective AoA
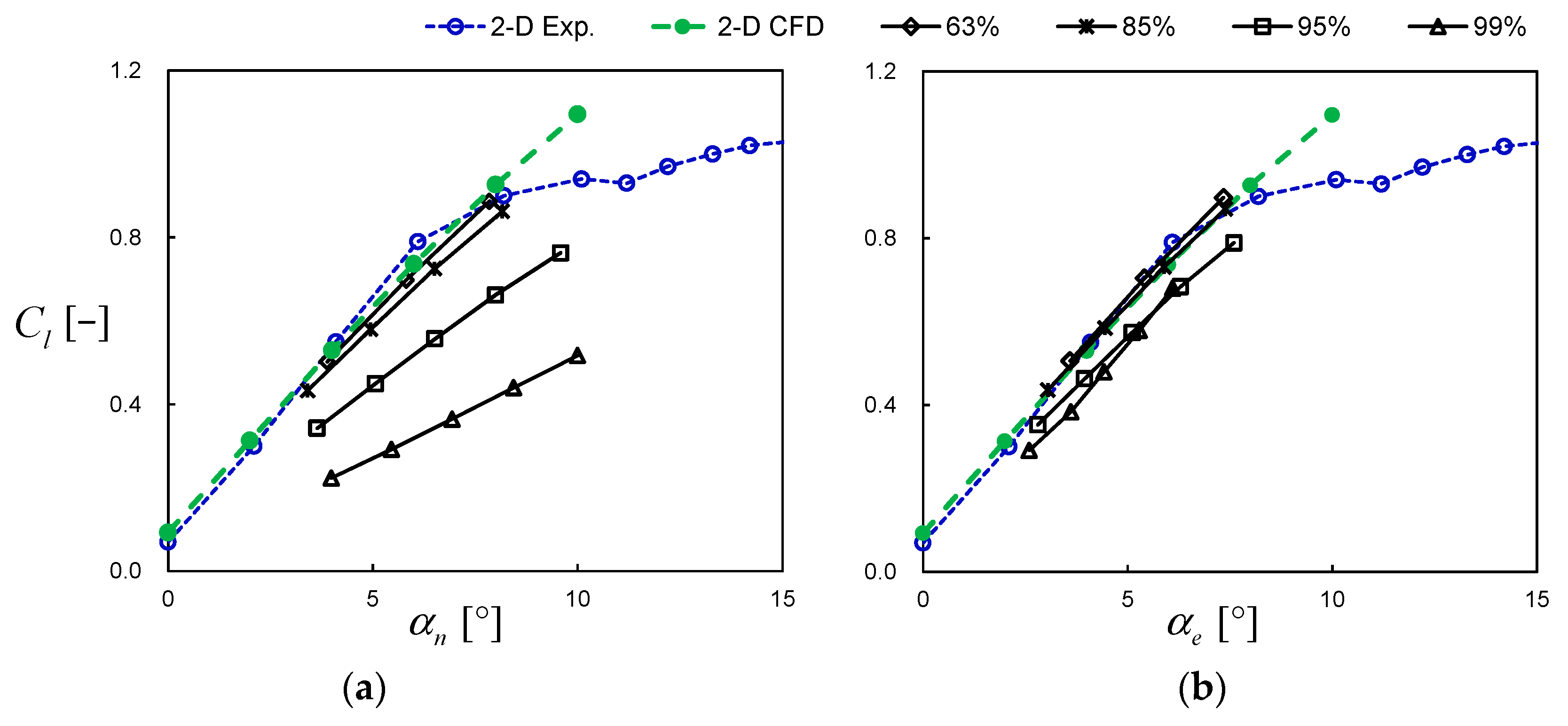
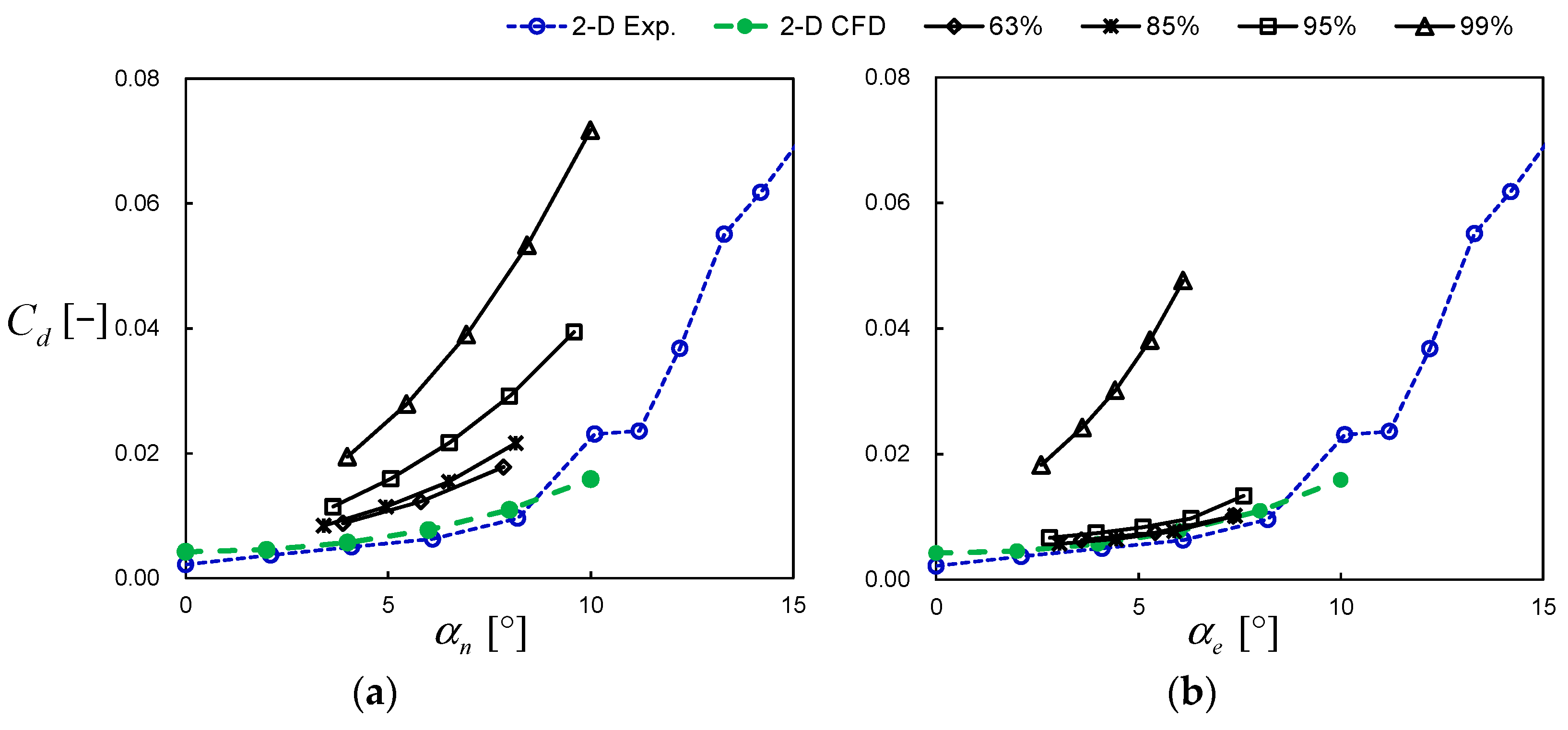
6.2. Validation of Extracted Lift and Drag Coefficients
7. Conclusions
- The determination of AoA depends on the consideration of different inductions (disc-induction, blade self-induction, and 3D-induction) experienced by the rotor blade. The blade self-induction should always be excluded, disc–induction leads to the nominal AoA, and the sum of disc-induction and 3D-induction, i.e., the tip-root-induction, leads to the effective AoA. The discrepancies between existing methods observed by other researchers are to some extent caused by the unclassified comparisons.
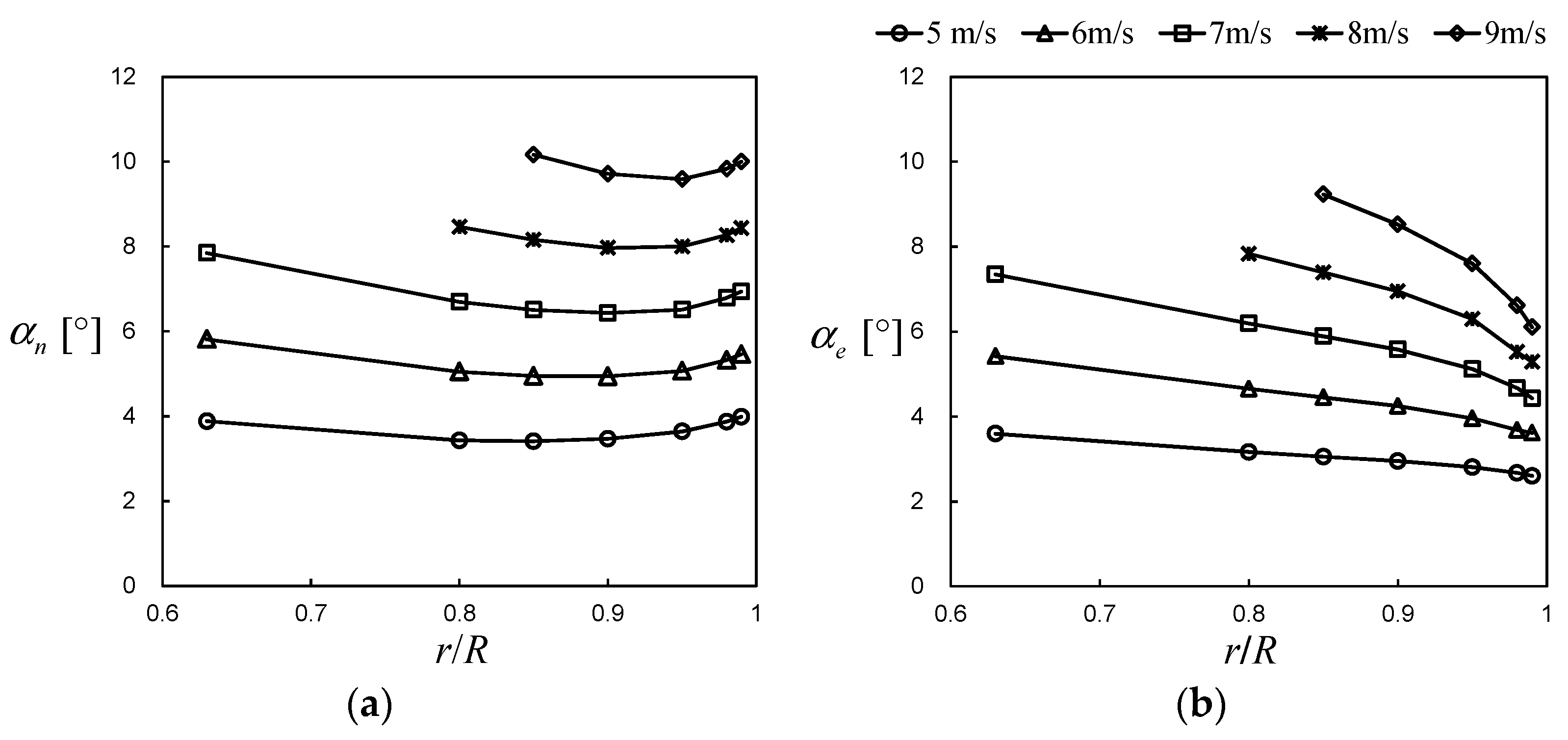
- The effective AoA and the nominal AoA are close to each other at mid-board sections but have different trends when approaching the tip. From the mid-board to the tip of the studied rotor, nominal AoA decreases first and then increases, while the effective AoA presents a downward trend and drops faster in the tip region.
- The difference between the nominal AoA and the effective AoA is the downwash angle. The ratio of the downwash angle to the nominal AoA keeps an identical regularity along the blade for different wind speeds, implying the feasibility to relate the effective AoA to the nominal AoA by establishing an engineering model.
- The extracted aerodynamic polar of both the mid-board and tip sections are consistent with each other as well as with the 2-D polar, which proves that the so-called 3-D polar is an appearance rather than a substance and the fundamentally aerodynamic difference between a blade section and its 2-D airfoil is caused by the variation of effective AoA. In fact, this conclusion is a basis of the BEM, VWT, or AL/NS method that determines the section forces from the 2-D airfoil data according to the effective AoA.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| axial interference factor | |
| B | number of blades |
| c | chord length |
| Cl, Cd | lift and drag coefficients |
| Cn, Ct | normal and tangential force coefficients |
| an unit vector | |
| unit vector in the x direction | |
| unit vector in the y direction | |
| unit vector in the z direction | |
| L | lift |
| length of a segment | |
| pressure | |
| pressure on the kth segment | |
| pressure of the undisturbed wind | |
| r | radial location of a blade cross-section |
| R | rotor radius |
| local velocity | |
| axial velocity after self-induction subtraction | |
| tangential velocity after self-induction subtraction | |
| local velocity on the kth segment | |
| induced velocity | |
| induced velocity of distributed vortices | |
| induced velocity of airfoil entity | |
| wind speed | |
| α | angle of attack |
| αe | effective angle of attack |
| αi | downwash angle |
| αn | nominal angle of attack |
| circulation of kth vortex | |
| Γ | circulation of concentrated vortex |
| relative error | |
| θ | local pitch angle |
| ρ | air density |
| ψ | azimuthal angle |
| rotational speed |
References
- Global Wind Report 2018; Global Wind Energy Council: Brussels, Belgium, April 2019.
- Renewables 2019 Global Status Report; REN21: Paris, France, 2019.
- Ghanaatian, M.; Lotfifard, S. Control of Flywheel Energy Storage Systems in the Presence of Uncertainties. IEEE Trans. Sustain. Energy 2018, 10, 36–45. [Google Scholar] [CrossRef]
- Ghanbari, N.; Shabestari, P.M.; Mehrizi-Sani, A.; Bhattacharya, S. State-Space Modeling and Reachability Analysis for a DC Microgrid. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; Institute of Electrical and Electronics Engineers (IEEE): Washington, DC, USA, 2019; pp. 2882–2886. [Google Scholar]
- Shen, W.Z. Special Issue on Wind Turbine Aerodynamics. Appl. Sci. 2019, 9, 1725. [Google Scholar] [CrossRef]
- Bai, C.-J.; Wang, W.-C. Review of computational and experimental approaches to analysis of aerodynamic performance in horizontal-axis wind turbines (HAWTs). Renew. Sustain. Energy Rev. 2016, 63, 506–519. [Google Scholar] [CrossRef]
- Snel, H. Review of Aerodynamics for Wind Turbines. Wind Energy 2003, 6, 203–211. [Google Scholar] [CrossRef]
- Hansen, M.O.L. The classical blade element momentum method. In Aerodynamics of Wind Turbines, 3rd ed.; Routledge: Abingdon, UK, 2015; pp. 38–53. [Google Scholar]
- Sørensen, J.N. General Momentum Theory for Horizontal Axis Wind Turbines; Springer Science and Business Media LLC: New York, NY, USA, 2016; Volume 4, pp. 123–132. [Google Scholar]
- Rehman, S.; Alam, M.M.; Alhems, L.M.; Rafique, M.M. Horizontal Axis Wind Turbine Blade Design Methodologies for Efficiency Enhancement—A Review. Energies 2018, 11, 506. [Google Scholar] [CrossRef]
- Wang, T.G. Unsteady Aerodynamic Modeling of Horizontal Axis Wind Turbine Performance. Ph.D. Thesis, University of Glasgow, Glasgow, UK, 1999. [Google Scholar]
- Shaler, K.; Kecskemety, K.M.; McNamara, J.J. Benchmarking of a Free Vortex Wake Model for Prediction of Wake Interactions. Renew. Energy 2019, 136, 607–620. [Google Scholar] [CrossRef]
- Zhong, W.; Tang, H.; Wang, T.; Zhu, C. Accurate RANS Simulation of Wind Turbine Stall by Turbulence Coefficient Calibration. Appl. Sci. 2018, 8, 1444. [Google Scholar] [CrossRef]
- Sumner, J.; Watters, C.S.; Masson, C. CFD in Wind Energy: The Virtual, Multiscale Wind Tunnel. Energies 2010, 3, 989–1013. [Google Scholar] [CrossRef] [Green Version]
- Van Kuik, G.A.M.; Sørensen, J.N.; Okulov, V.L. Rotor theories by professor Joukowsky: Momentum theories. Prog. Aerosp. Sci. 2015, 73, 1–18. [Google Scholar] [CrossRef]
- Shen, W.Z.; Mikkelsen, R.; Sørensen, J.N.; Bak, C. Tip loss corrections for wind turbine computations. Wind Energy 2005, 8, 457–475. [Google Scholar] [CrossRef]
- Zhong, W.; Shen, W.; Wang, T.; Li, Y. A tip loss correction model for wind turbine aerodynamic performance prediction. Renew. Energy 2020, 147, 223–238, in press. [Google Scholar] [CrossRef]
- Zhu, C.; Wang, T.; Zhong, W. Combined Effect of Rotational Augmentation and Dynamic Stall on a Horizontal Axis Wind Turbine. Energies 2019, 12, 1434. [Google Scholar] [CrossRef]
- Snel, H.; Houwink, R.; Bosschers, J. Sectional Prediction of Lift Coefficients on Rotating Wind Turbine Blades in Stall; ECN-C-93-052; ECN: Petten, The Netherlands, 1993. [Google Scholar]
- Buining, A.; van Bussel, G.J.W.; Corten, C.P.; Timmer, W.A. Pressure Distributions from a Wind Turbine Blade: Field Measurements Compared to 2-Dimensional Wind Tunnel Data; DUT-IVW-93065R; Delft University of Technology: Delft, The Netherlands, 1993. [Google Scholar]
- Laino, D.; Hansen, A.; Minnema, J. Validation of the AeroDyn subroutines using NREL unsteady aerodynamics experiment data. Wind Energy 2002, 5, 227–244. [Google Scholar] [CrossRef]
- Lindenburg, C. Investigation into Rotor Blade Aerodynamics—Analysis of the Stationary Measurements on the UAE Phase-VI Rotor in the NASA-Ames Wind Tunnel; ECN: Petten, The Netherlands, 2003. [Google Scholar]
- Bak, C.; Johansen, J.; Andersen, P.B. Three-dimensional corrections of airfoil characteristics based on pressure distributions. In Proceedings of the European Wind Energy Conference (EWEC 06), Athens, Greece, 27 February–2 March 2006. BL3.356. [Google Scholar]
- Sant, T.; Van Kuik, G.; Van Bussel, G.J.W. Estimating the angle of attack from blade pressure measurements on the NREL Phase VI rotor using a free wake vortex model: Axial conditions. Wind Energy 2006, 9, 549–577. [Google Scholar] [CrossRef]
- Sant, T.; van Kuik, G.; van Bussel, G.J.W. Estimating the angle of attack from blade pressure measurements on the NREL phase VI rotor using a free wake vortex model: Yawed conditions. Wind Energy 2009, 12, 1–32. [Google Scholar] [CrossRef]
- Bretton, S.-P.; Sibuet Watters, C.; Masson, C. Study of the Angle of Attack on a Wind Turbine Blade Using a Vortex Wake Lifting Line Method; The Science of Making Torque from Wind: Crete, Greece, 2010. [Google Scholar]
- Hansen, M.O.; Sørensen, N.N.; Michelsen, J.N. Extraction of lift, drag and angle of attack from computed 3-D viscous flow around a rotating blade. In Proceedings of the EWEC, Dublin, Ireland, 6–9 October 1997; pp. 499–501. [Google Scholar]
- Johansen, J.; Sørensen, N. Aerofoil characteristics from 3D rotor CFD simulations. Wind Energy 2004, 7, 283–294. [Google Scholar] [CrossRef]
- Jost, E.; Klein, L.; Leipprand, H.; Lutz, T.; Krämer, E. Extracting the angle of attack on rotor blades from CFD simulations. Wind Energy 2018, 21, 807–822. [Google Scholar] [CrossRef]
- Rahimi, H.; Hartvelt, M.; Peinke, J.; Schepers, J. Investigation of the current yaw engineering models for simulation of wind turbines in BEM and comparison with CFD and experiment. J. Phys. Conf. Ser. 2016, 753, 022016. [Google Scholar] [CrossRef] [Green Version]
- Herráez, I.; Daniele, E.; Schepers, J.G. Extraction of the wake induction and angle of attack on rotating wind turbine blades from PIV and CFD results. Wind Energy Sci. 2018, 3, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Shen, W.Z.; Hansen, M.O.L.; Sørensen, J.N. Determination of angle of attack (AOA) for rotating blades. In Proceedings of the Euromech Colloquium—Wind Energy; Springer: Berlin/Heidelberg, Germany, 2006; pp. 205–209. [Google Scholar]
- Shen, W.Z.; Hansen, M.O.L.; Sørensen, J.N.; Sørensen, J.N. Determination of the angle of attack on rotor blades. Wind Energy 2009, 12, 91–98. [Google Scholar] [CrossRef]
- Yang, H.; Shen, W.Z.; Sørensen, J.N.; Zhu, W.J. Extraction of airfoil data using PIV and pressure measurements. Wind Energy 2011, 14, 539–556. [Google Scholar] [CrossRef]
- Yang, H.; Shen, W.; Sørensen, J.N.; Zhu, W. Investigation of load prediction on the Mexico rotor using the technique of determination of the angle of attack. Chin. J. Mech. Eng. 2012, 25, 506–514. [Google Scholar] [CrossRef]
- Schneider, M.S.; Nitzsche, J.; Hennings, H. Accurate load prediction by BEM with airfoil data from 3D RANS simulations. J. Phys. Conf. Ser. 2016, 753, 82016. [Google Scholar] [CrossRef] [Green Version]
- Syed Ahmed Kabir, I.F.; Ng, E.Y.K. Insight into stall delay and computation of 3D sectional aerofoil characteristics of NREL phase Ⅵ wind turbine using inverse BEM and improvement in BEM analysis accounting for stall delay effect. Energy 2017, 120, 518–536. [Google Scholar] [CrossRef]
- Wimshurst, A.; Willden, R.H.J. Extracting lift and drag polars from blade-resolved computational fluid dynamics for use in actuator line modelling of horizontal axis turbines. Wind Energy 2017, 20, 815–833. [Google Scholar] [CrossRef]
- Elgammi, M.; Sant, T. Combining Unsteady Blade Pressure Measurements and a Free-Wake Vortex Model to Investigate the Cycle-to-Cycle Variations in Wind Turbine Aerodynamic Blade Loads in Yaw. Energies 2016, 9, 460. [Google Scholar] [CrossRef]
- Wen, B.; Tian, X.; Dong, X.; Peng, Z.; Zhang, W.; Wei, K. A numerical study on the angle of attack to the blade of a horizontal-axis offshore floating wind turbine under static and dynamic yawed conditions. Energy 2019, 168, 1138–1156. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, L.; Yang, K. Development and Validation of Aerodynamic Measurement on a Horizontal Axis Wind Turbine in the Field. Appl. Sci. 2019, 9, 482. [Google Scholar] [CrossRef]
- Schepers, J.G.; Boorsma, K.; Cho, T.; Gomez-Iradi, S.; Schaffarczyk, P.; Jeromin, A.; Lutz, T.; Meister, K.; Stoevesandt, B.; Schreck, S.; et al. Final Report of IEA Task 29, Mexnext (Phase 1): Analysis of MEXICO Wind Tunnel Measurements; Technical Report ECN-E12-004; Energy Research Centre of the Netherlands (ECN): Amsterdam, The Netherlands, 2012. [Google Scholar]
- Guntur, S.; Sørensen, N.N. An evaluation of several methods of determining the local angle of attack on wind turbine blades. J. Phys. Conf. Ser. 2014, 555, 012045. [Google Scholar] [CrossRef] [Green Version]
- Rahimi, H.; Schepers, J.; Shen, W.; García, N.R.; Schneider, M.; Micallef, D.; Ferreira, C.S.; Jost, E.; Klein, L.; Herráez, I. Evaluation of different methods for determining the angle of attack on wind turbine blades with CFD results under axial inflow conditions. Renew. Energy 2018, 125, 866–876. [Google Scholar] [CrossRef] [Green Version]
- Hand, M.M.; Simms, D.A.; Fingersh, L.J.; Jager, D.W.; Cotrell, J.R.; Schreck, S.; Larwood, S.M. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaigns; NREL/TP-500-29955; National Renewable Energy Laboratory: Golden, CO, USA, 2001. [Google Scholar]
- Schlichting, H. Boundary-Layer Theory, 7th ed.; McGraw-Hill Book Company: New York, NY, USA, 1979. [Google Scholar]
- Ramsay, R.; Hoffman, M.; Gregorek, G. Effects of Grit Roughness and Pitch Oscillations on the S809 Airfoil; NREL/TP-442-7817; National Renewable Energy Laboratory: Golden, CO, USA, 1995. [Google Scholar]
- Sørensen, J.N.; Dag, K.O.; Ramos-Garía, N. A new tip correction based on the decambering approach. J. Phys. Conf. Ser. 2015, 524, 012097. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, W.; Shen, W.Z.; Wang, T.G.; Zhu, W.J. A New Method of Determination of the Angle of Attack on Rotating Wind Turbine Blades. Energies 2019, 12, 4012. https://doi.org/10.3390/en12204012
Zhong W, Shen WZ, Wang TG, Zhu WJ. A New Method of Determination of the Angle of Attack on Rotating Wind Turbine Blades. Energies. 2019; 12(20):4012. https://doi.org/10.3390/en12204012
Chicago/Turabian StyleZhong, Wei, Wen Zhong Shen, Tong Guang Wang, and Wei Jun Zhu. 2019. "A New Method of Determination of the Angle of Attack on Rotating Wind Turbine Blades" Energies 12, no. 20: 4012. https://doi.org/10.3390/en12204012