1. Introduction
The introduction of renewable energy sources (RESs) based distributed generations (DGs) also known as distributed energy resources (DERs) into the modern electric power systems has raised significant challenges such as bidirectional power flow in the distribution system, stochastic generation nature of RESs, and distinctive fault current properties [
1]. Microgrids (MG) are low-voltage mini-grids and their concept is projected years back to aggregate RESs, energy storage systems (ESS,) and loads to efficiently manage and control the DGs [
2,
3,
4]. Consequently, MGs have served as a prospective platform where RESs are integrated into the modern-day distribution system with operational flexibility and controllability in either grid-dependent or autonomous modes [
5]. In microgrids, controllable voltage source inverters (VSI), are commonly used to interface various RESs such as photovoltaic (PV), wind, batteries, fuel-cells, and micro-turbines to enhance the control flexibility and ensure high quality of electric power in systems [
6,
7,
8,
9].
The system frequency, voltage, and power flow control for autonomous MG are determined by renewable energy sources. However, in grid-connected modes, the main grid imposes most of the supply standards [
9]. In stand-alone operation, voltage and frequency are regulated using control schemes with multi-loop [
8,
10]. These control systems are usually implemented in any of these reference frames; synchronous direct-quadrature-zero coordinates, stationary alpha-beta-gamma coordinates, and natural three-phase coordinates [
8,
11]. In a distributed generation, inverter interfaces are typically connected in parallel [
12] with appropriate power-sharing among them. Numerous control strategies have been proposed to achieve a suitable power (active and reactive) sharing, such as: average current control [
13], master–slave control [
14,
15], and circular-chain-control [
16]. A decentralized control technique frequently employed in the instance of inverters operated in parallel to avoid circulating currents is droop technique [
17]. Droop control is extensively used in microgrids and relies on localized information to achieve decentralized control. This makes it a more appropriate power-sharing technique compared to various high bandwidth communication network-based techniques [
6,
18].
The inverter interface isolates the DGs and the wider main grid electrically; and nevertheless serves as an economical link to allow electrical energy transfer and ancillary services at the interface [
19]. Several challenges are inherent owing to the sensitivity of the bidirectional flow of power between the microgrid and host utility grid [
5]. In the event of voltage disturbances occasioned by faults in the host grid, studies infer the instant switching from grid-connected to islanded mode [
20]. The total grid impedance up to the fault and the voltage at the point of fault occurrence have been identified in fault analysis as major factors affecting electrical faults in the grid [
21,
22]. The energy-generating units are expected to disconnect from the grid at the instance of voltage sags and reconnect just at the moment that the fault or disturbance is cleared. Therefore, MGs were not expected to provide additional services including low voltage or fault ride-through (LVRT/FRT) supports. Conversely, due to the growing penetration of the grid-interactive and high power capacity MGs, it is expected that they deliver a substantial quantity of power to the host grid when operational in grid synchronous mode. During fault or voltage sag, this will alleviate the potential instability by ensuring the active power delivery to local microgrid loads and reactive power support to the host grid. Avoiding the disconnection of high capacity MGs during grid fault or any disturbance forestalls potential network instabilities [
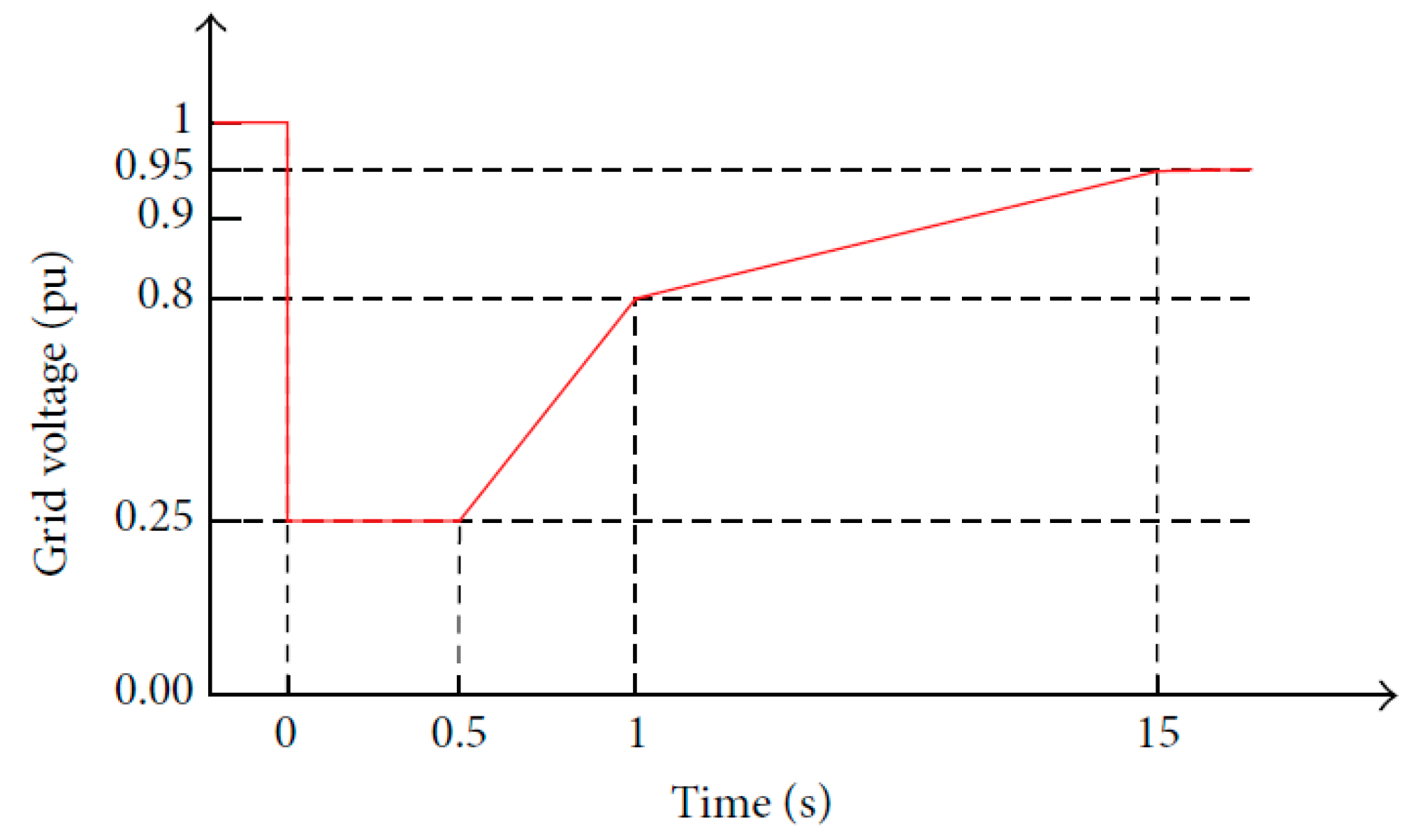
23]. As a result, some developed countries have amended their respective grid codes to make provisions for rising RES capacity. Spain, Germany, and Denmark are among the foremost countries in 2004, 2006, and 2008 that already issued the FRT/LVRT requirements for DERs connected to the grid [
24,
25]. Spanish code requirement is displayed in
Figure 1 accordingly. Even though these requirements are projected for the high-voltage grid, they are however valid for low-voltage grid due to similar concepts [
18].
The power quality (PQ) of a grid-connected DG, as well as that of load connected, is degraded during the period of disturbance such as a fault in the host grid [
27]. Supporting PQ schemes—such as static synchronous compensators (STATCOMs), unified power quality conditioner (UPQCs), and dynamic voltage restorers (DVRs)—have played tremendous roles in FRT capability enhancement of the of DER systems [
28,
29,
30]. Similarly, several innovative FRT control strategies and schemes have been proposed in [
26,
31,
32]. Zamani et al. [
33] recommend a scheme for the control of an inverter interfaced RES for performance enhancement of the host grid during disturbances and faults. In Kou and Wei [
32], certain considerations on various grid code requirements for MGs interconnection and operation were made, which recommends LVRT capabilities for MGs and provision of additional services under faults. By these recommendations, grid-connected MG is required to ride-through balanced and unbalanced sags in grid voltage as expressed in FRT voltage profile. However, interruption followed by a transition into autonomous operation is only permitted when fault persists [
20]. Fault current limiters (FCLs) are utilized in minimizing the contribution to the fault current level of the DGs to improve FRT [
34]. References [
35,
36] suggested different types and modified superconducting FCL; flux-coupling-type, resistive type to enhance the microgrids, wind turbines, solar photovoltaic and other DGs FRT capabilities. The FCL potential to enhance FRT is well established in works of literature [
37,
38]. FCL is positioned between a microgrid and main network and as such, overall FRT is achieved for all of the microgrid DERs [
39]. A supplementary controller for voltage is suggested in [
40] for the FRT control of inverters based DGs. This controller is expected to be superimposed with numerous available voltage control schemes with minimum adjustments. These modifications, therefore, do not necessarily need to alter the initial configuration of these existing controllers. Towards realizing the numerous microgrid control and operation requirements, a hierarchical control has been proposed in [
41,
42] with fundamental control goals which include voltage control, local power allocation among distributed energy units, frequency regulation and power control (active and reactive) under synchronization with host grid [
6]. A rapid fault detection system plays a crucial role in enhancing the effects of these several strategies.
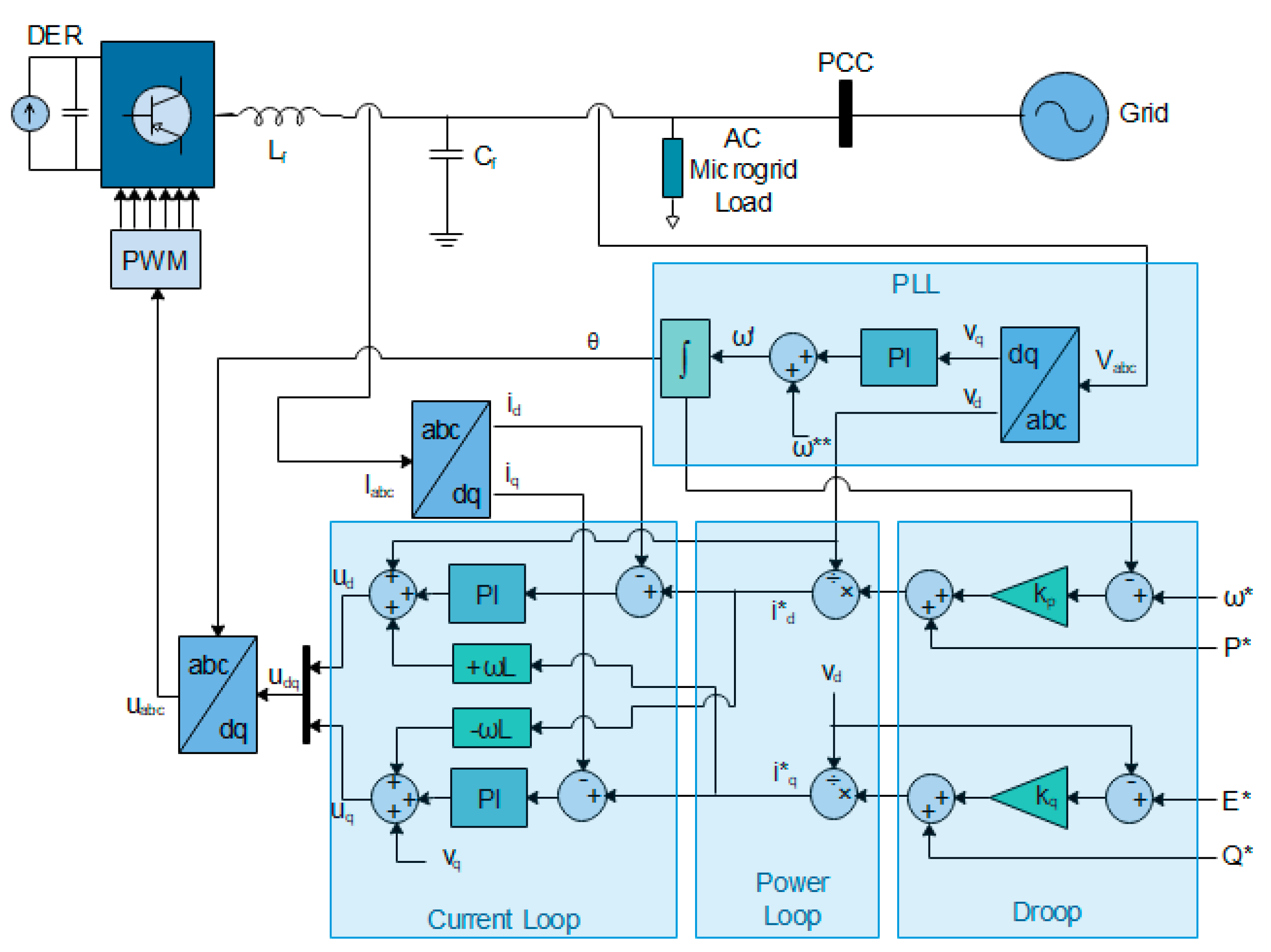
To meet the anticipated FRT requirements, control schemes and topologies for the grid-supporting MG need to be developed. This work aims at developing a secondary control scheme for the FRT/LVRT enhancement of a droop controlled grid supporting inverter-microgrids using delayed signal cancellation and stationary reference frame control for the reactive power injection and fault current limitation. To satisfy numerous requisites of operation and control in a microgrid, the secondary LVRT control stipulates set-points for the primary control that consists of the droop, power and current loops. These two levels form a hierarchical control structure. The strategy requires no mode switching and enables the inverter-interfaced MG to ride through faults or transient disturbances on the host utility grid. The need for resynchronization of microgrid with the main grid as proposed in seamless transition method [
43,
44,
45,
46] after fault clearance is completely unnecessary and shedding of local loads is avoided. In a grid supporting system, the active and reactive power is controlled to meet local load requirement and the surplus MG power is simultaneously delivered to the main grid. Active power and reactive power are controlled through frequency regulation and voltage regulation respectively, such that local power-sharing among constituent inverters is not compromised in any way.
Acceptable power quality for the local loads during fault duration is ensured with the inclusion of a properly sized anti-parallel IGBT-diode switched inductance. It is noteworthy that as a result of high R/X ratio in low voltage distribution feeder line, injecting reactive power under faults may not substantially contribute to the recovery of voltage. Hence this work has been able to deploy a properly sized anti-parallel IGBT-diode switched inductance at the PCC of the MG with the grid to reduce R/X ratio and effectively support the voltage under grid disturbance. This provides protection and alleviates the effects of fault especially on the local sensitive loads of the microgrid. Consequently, a direct theoretical framework has been provided for the determination of the value of this switched inductance. Furthermore, this arrangement counteracts the effect of grid disturbances by limiting transient overcurrent throughout grid faults. This is enhanced by the introduction of a secondary control block that regulates the active power and reactive power exchange between the host grid and the microgrid in conformity with the stipulated utility grid standard.
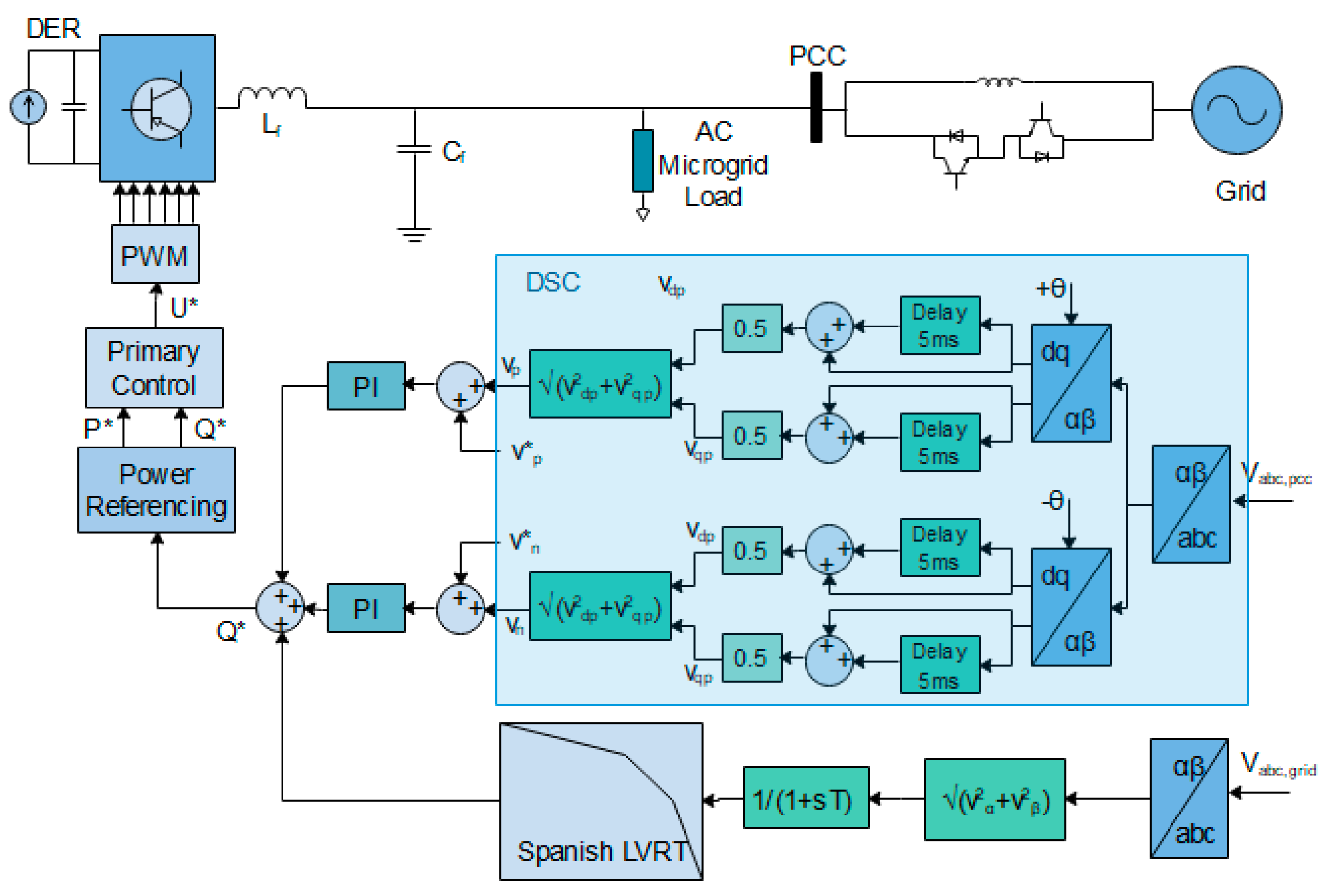
To ensure the efficient and prompt responsiveness, a fault detection procedure built on a delayed signal cancellation (DSC) algorithm is implemented to detect the fault instantly in less than 0.05 s. The DSC algorithms apply the concept of PLL and therefore enhanced with fast detection of the positive sequence and negative sequences [
47,
48,
49]. In [
40], an LVRT strategy is proposed which implements the wavelet-based fault detection technique as given in [
50,
51]. The voltage disturbance detection method based on wavelet transform can detect the faults within 3.12 ms. The DSC technique is efficient for faster convergence and detects faults within 0.1515 ms under various unbalanced voltage conditions has been validated in several works of literature [
52,
53,
54,
55] using simulations and experiments. DSC determines the fault interval at which active and reactive power references are adjusted appropriately. Lastly, DSC is used in giving adequate information for the control of the PCC voltage and this ensures quality power delivery to the microgrid loads irrespective of the transients on the main grid. The simulation results reveal the performance and effectiveness of the proposed scheme in enhancing LVRT/FRT requirements of Spanish code.
The rest of this paper is organized thus:
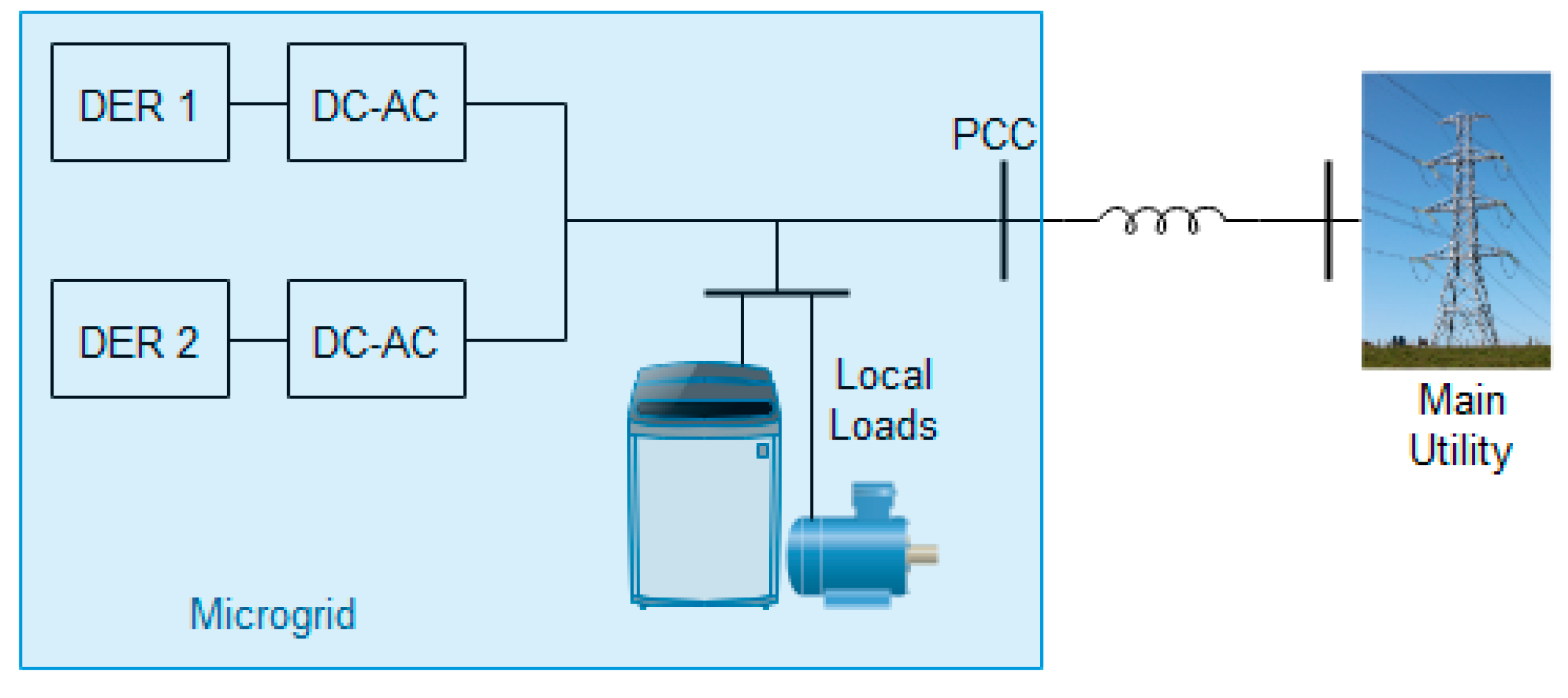
Section 2 presents the modelling of a grid supporting MG system whose aim is to actively partake in grid voltage and frequency regulations via the control of active power and reactive power supplied to the AC grid;
Section 3 describes the proposed secondary FRT control of voltage with the description of DSC;
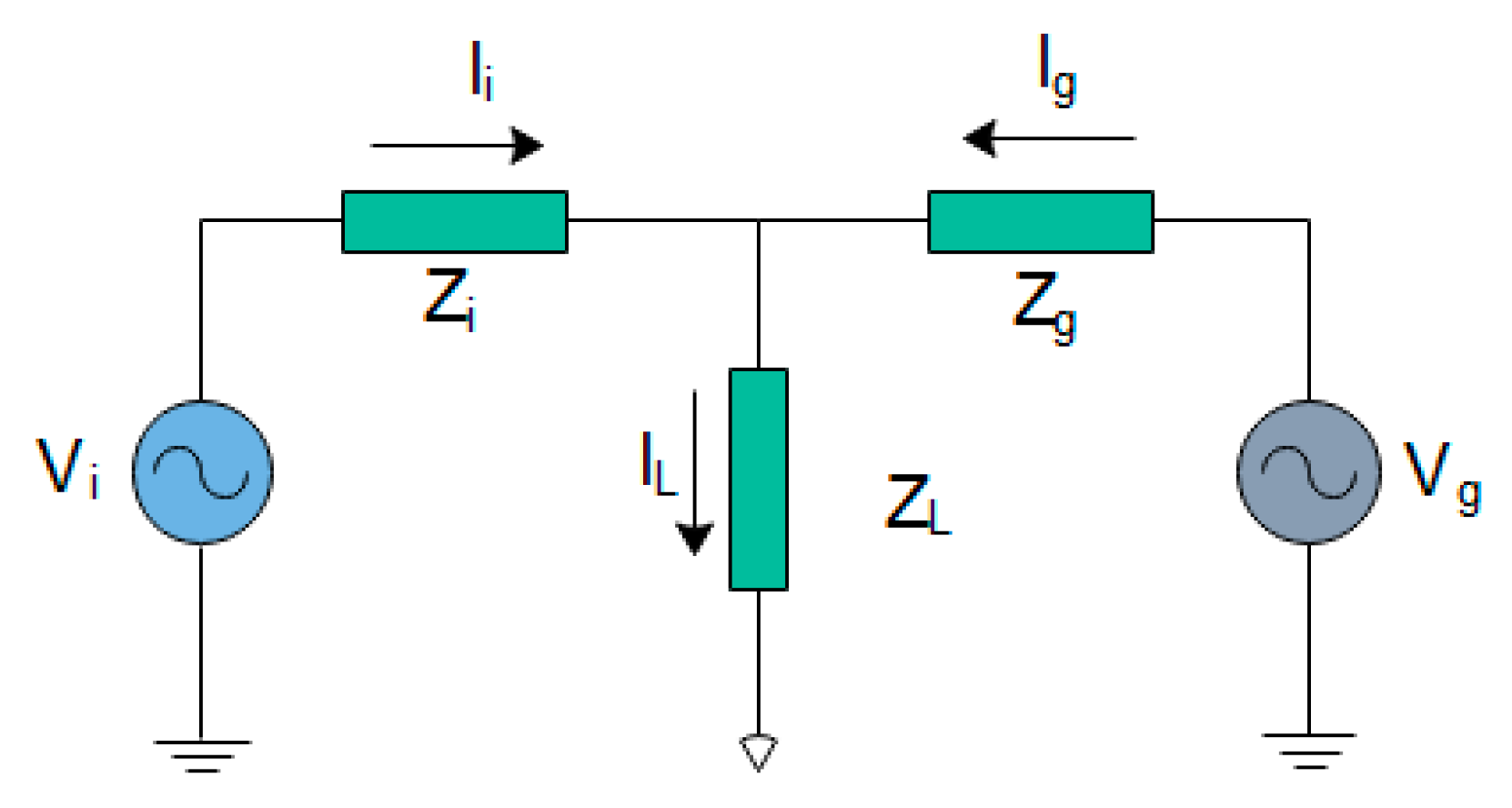
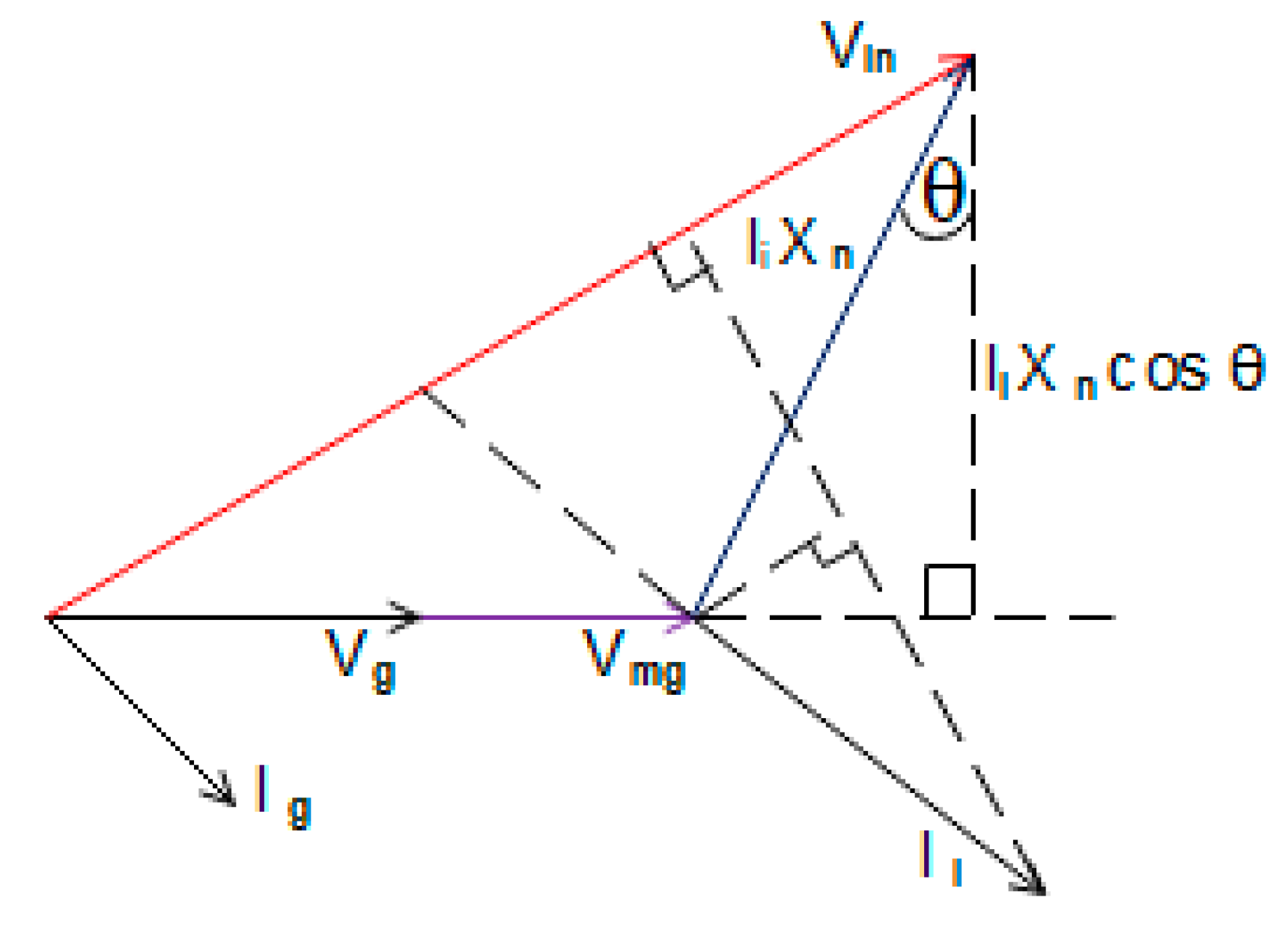
Section 4 discusses the power flow in a grid support system and presents the how to determine the value of IGBT-diode switched reactor; and
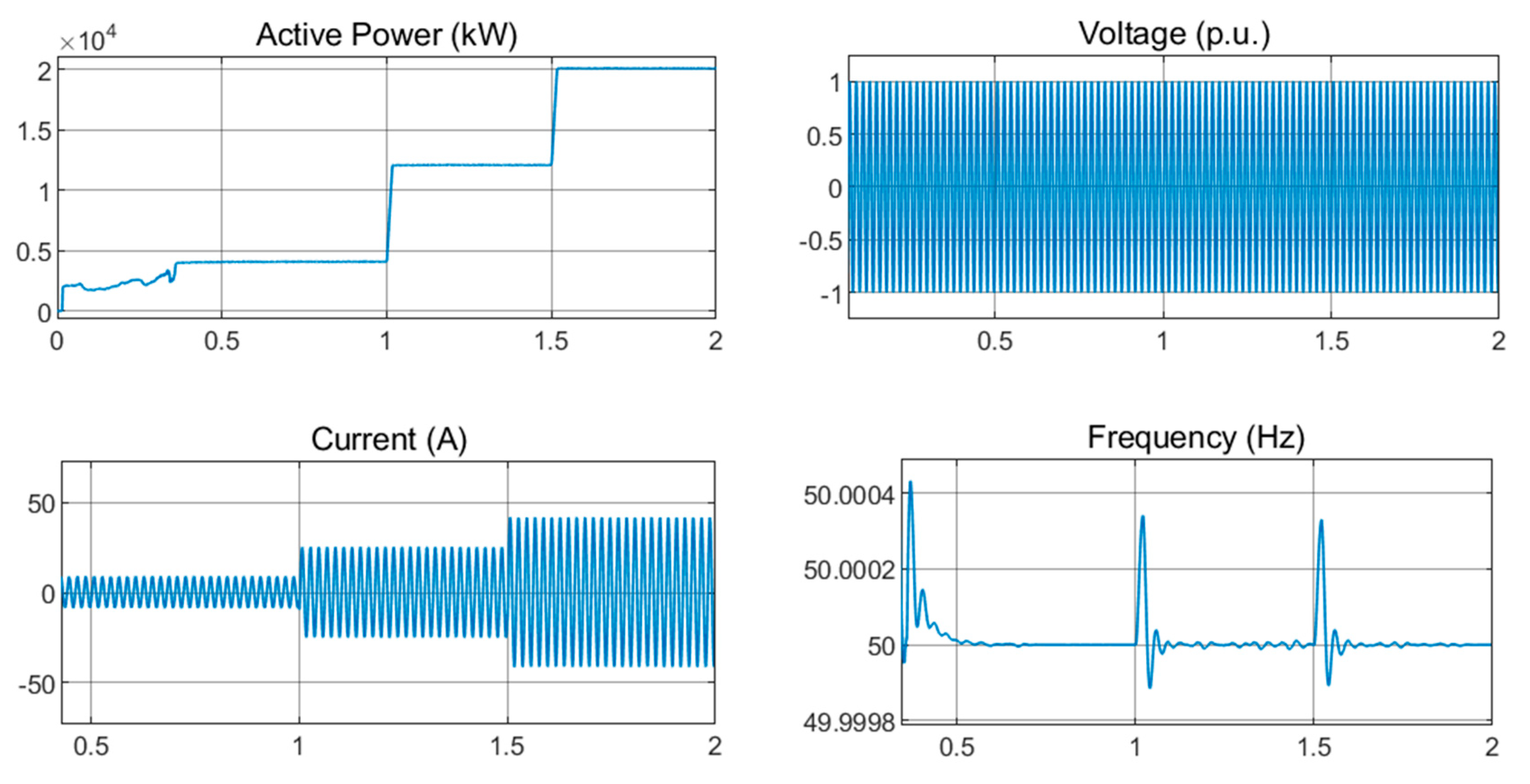
Section 5 shows the detailed results of simulation of the proposed strategies under symmetrical disturbance and asymmetrical disturbance on the grid.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}