Electric Vehicle Battery Simulation System for Mobile Field Test of Off-Board Charger

Abstract
:1. Introduction
2. Methodology
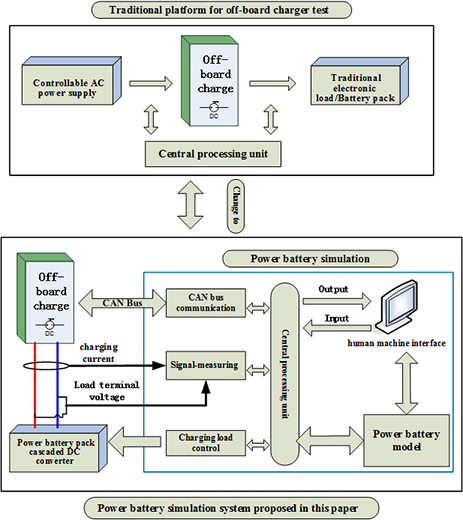
2.1. Battery Simulation System Technical Scheme
2.2. Single Power Cell Model
2.3. Charging Response Simulation
2.4. Lightweight Adjustable DC Charging Load
2.4.1. Main Circuit Topology
2.4.2. Control Method
3. Results
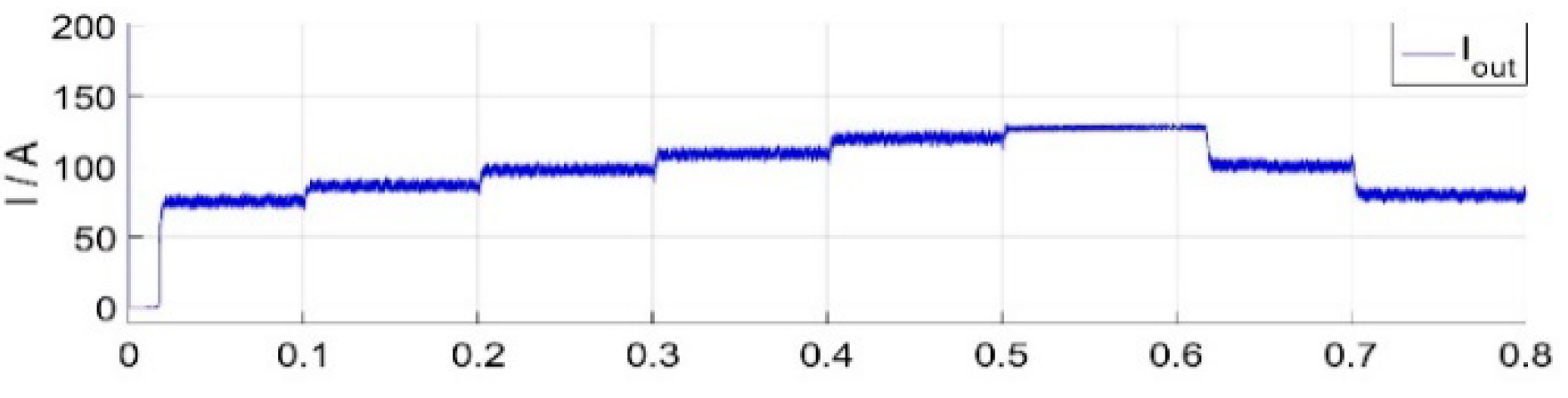
3.1. Results of Lightweight Adjustable DC Charging Load Simulation
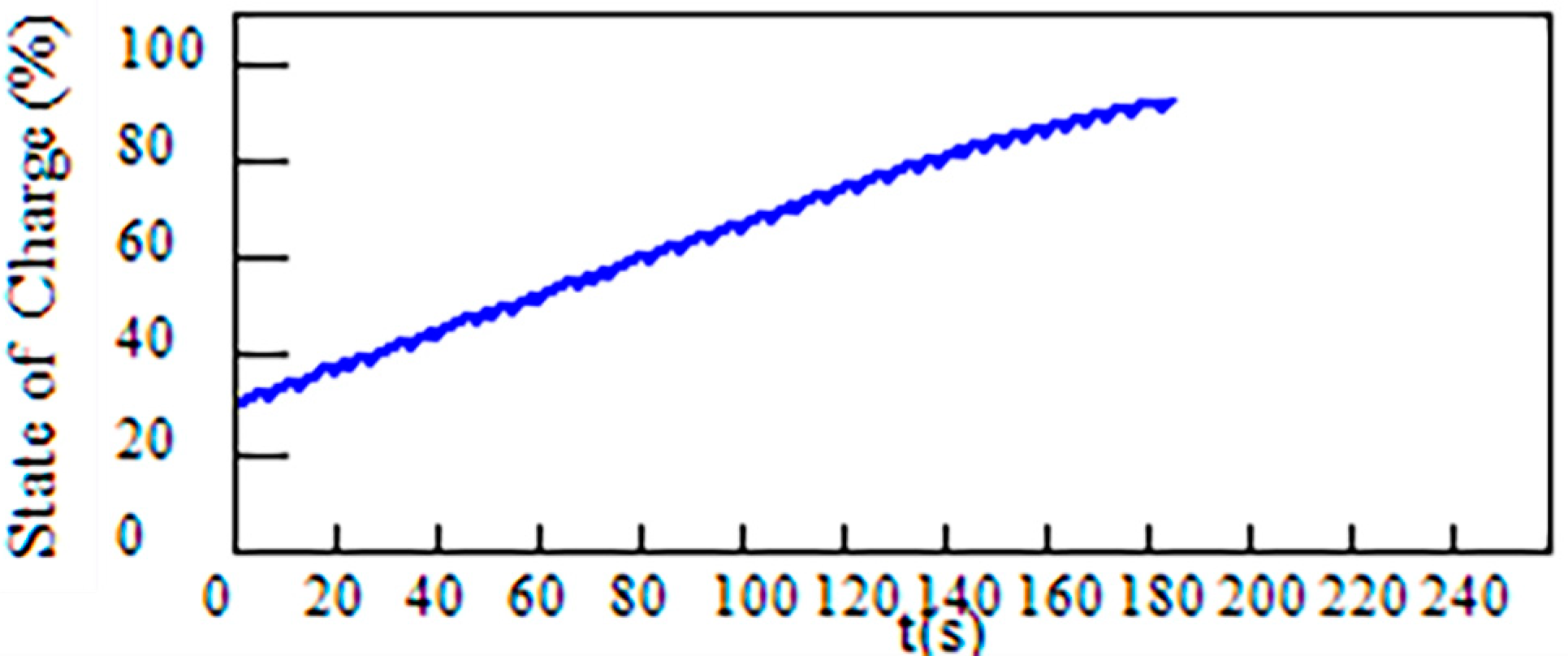
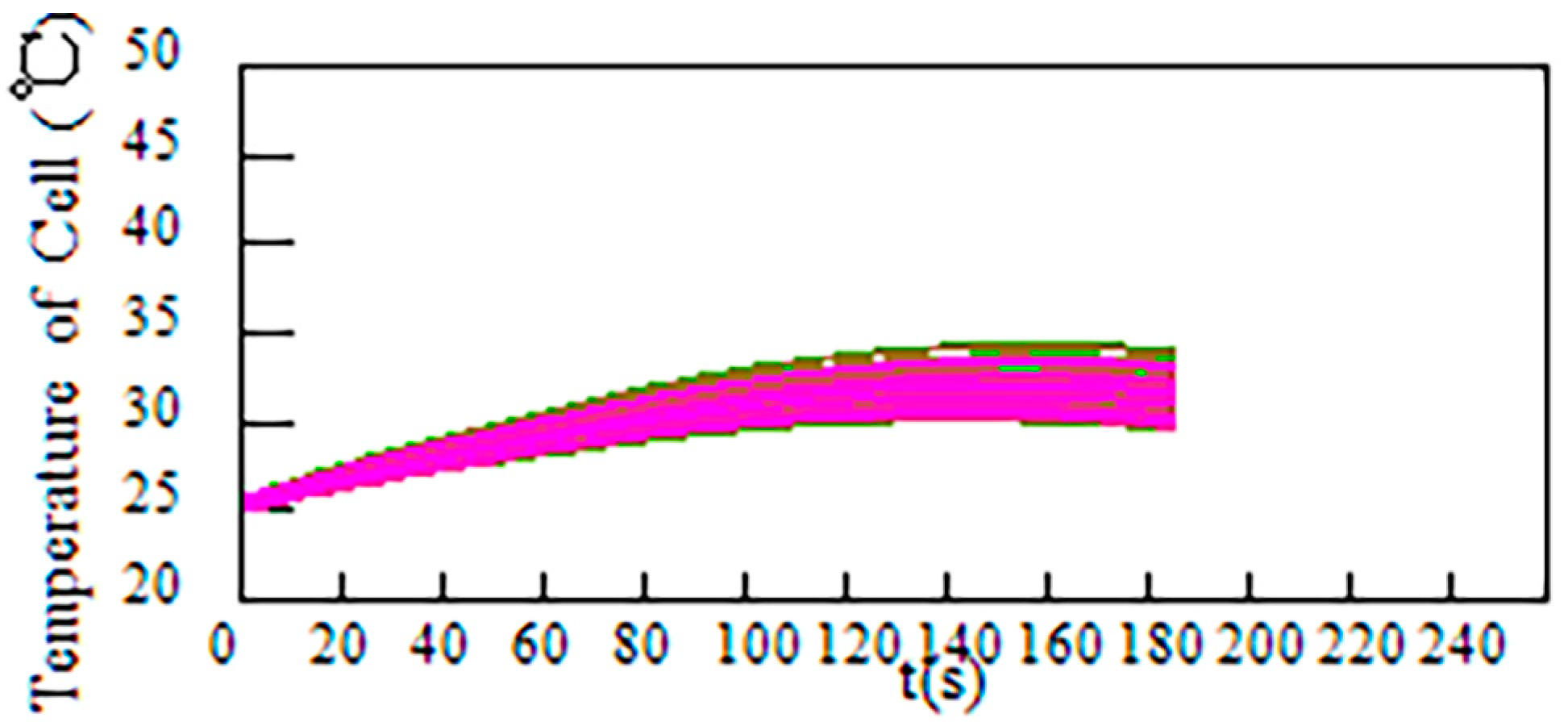
3.2. Results of Battery Simulation
3.3. Battery Simulation System Verification and Validation
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Hu, Z.; Song, Y.; Xu, Z.; Luo, Z.; Zhan, W.; Jia, L. The influence and utilization of electric vehicles connected to the power grid. Proc. CSEE 2012, 32, 1–10. [Google Scholar]
- Wang, X.; Shao, C.; Wang, C.; Du, C. A review of charging load and dispatch control strategies for electric vehicles. Proc. CSEE 2013, 33, 1–10. [Google Scholar]
- Boulanger, A.G.; Chu, A.C.; Maxx, S.; Waltz, D.L. Vehicle electrification: Status and issues. Proc. IEEE 2011, 99, 1116–1138. [Google Scholar] [CrossRef]
- Guo, C.; Zhai, Z.; Wu, L.; Xiao, X. Analysis of the development prospects and key factors of electric vehicles. Automot. Eng. 2012, 34, 852–858. [Google Scholar]
- Wu, Q. Progress of China’s Ten Cities and Thousand Vehicles plan. Automob. Accessories 2009, 1, 15–19. [Google Scholar]
- Ma, L.; Yang, J.; Fu, C.; Liu, P.; Sun, Y. A review of research on effects of charge and discharge of electric vehicles on power grid. Power Syst. Prot. Control 2013, 41, 140–148. [Google Scholar]
- Xiao, X.; Wen, J.; Tao, S.; Li, Q. Research and suggestions on some key issues in electric vehicle charging infrastructure planning. J. Electrotech. 2014, 29, 1–10. [Google Scholar]
- Chen, L.; Zhang, H.; Ni, F.; Zhu, J. Discussion on the status quo and development of electric vehicle energy supply facilities. Power Syst. Autom. 2011, 35, 11–17. [Google Scholar]
- Lu, M.; Zhou, X.; Zhang, W. Research on the development status of electric vehicle charging facilities at home and abroad. Huazhong Electr. Power 2010, 5, 39–43. [Google Scholar]
- Xu, H.; Cai, J. An Optimal Design of Electric Vehicle Charging Piles Based on Time-space Sequence. Earth Environ. Sci. 2018, 170, 042027. [Google Scholar] [CrossRef]
- Gao, C.; Zhang, L. Overview of the impact of electric vehicle charging on power grid. Power Grid Technol. 2011, 35, 127–131. [Google Scholar]
- Liu, W.; Zhang, L.; Liu, Z.; He, J. Demonstration method of urban pure electric vehicle development model. Autom. Electr. Power Syst. 2014, 38, 34–40. [Google Scholar]
- Li, J.; Jiang, J. Research on the stability of pure electric vehicle charger system. Electr. Power Autom. Equip. 2012, 32, 13–17. [Google Scholar]
- Liu, H.; Huang, K.; Yang, Y.; Wei, H.; Ma, S. Real-time vehicle-to-grid control for frequency regulation with high frequency regulating signal. Prot. Control Mod. Power Syst. 2018, 3, 141–148. [Google Scholar] [CrossRef]
- Cui, X.; Shen, W.; Zheng, J. New on-line approach for lithium iron phosphate battery pack balancing based on state of charge. In Proceedings of the International Conference on Electrical Machinesand Systems IEEE, Pattaya, Thailand, 25–28 October 2016; pp. 762–767. [Google Scholar]
- Yang, Y.; Che, Y.; Yang, L. Comprehensive evaluation of multiple indicators of electric vehicle charger operation status. Electr. Power Autom. Equip. 2018, 38, 72–79. [Google Scholar]
- Ding, X.Z.; Bi, Z.Z.; Cao, M.; Wang, E.; Zhai, S.L. Technical analysis and experimental research of electric vehicle off-board charger. Electr. Meas. Instrum. 2012, 49, 14–17. [Google Scholar]
- Gu, Y. Research on Electric Vehicle Charger and Its Electrical Performance Test. Master’s Thesis, Department of Electronic and Engineering, Beijing Jiaotong University, Beijing, China, 2012. [Google Scholar]
- Liu, Y.L.; Li, G.D.; Hu, B.; Zhao, X.; Che, Y.B.; Teng, W. The establishment and practice of the detection platform for electric vehicle non-vehicle charger. J. Power Syst. Autom. 2015, 27, 98–102. [Google Scholar]
- Zhu, B.; Hou, X.Z.; Sun, H.L.; Liu, Y.X.; Wang, H.C. Electric vehicle charging facility automatic detection platform design. Electr. Meas. Instrum. 2017, 54, 75–80. [Google Scholar]
- Zhu, B.; Ma, G.L.; Wang, J.G.; Sun, H.L.; Liu, Y.X.; Wu, Y.; Li, Z.; Long, W.; Xu, T.T.; Wang, H.C. Electric vehicle DC charger automatic detection platform design. Power Grid Clean Energy 2017, 33, 120–127. [Google Scholar]
- Yan, Q.W.; He, J.Q. Design of automatic detection system for DC charging point of electric vehicle. Comput. Meas. Control 2018, 26, 35–38. [Google Scholar]
- He, Z.; Yang, G.; Lu, L.; Wu, H.; Yan, H. Design of power electronic load system for simulating motor port characteristics. J. Electrotech. 2016, 31, 194–203. [Google Scholar]
- Yan, X.; Wang, L.; Li, Y.; Gu, J.; Zhang, B.; Yin, F.; Zhang, H. Test system for electric vehicle charging equipment based on virtual battery technology. Electr. Power Autom. Equip. 2014, 34, 27–33. [Google Scholar]
- Bai, H.; Zhang, Y.; Semanson, C.; Luo, C.; Mi, C.C. Modelling, design and optimisation of a battery charger for plug-in hybrid electric vehicles. IET Electr. Syst. Transp. 2011, 1, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Cheng, K.W.E.; Zhao, S.W. Power battery charger for electric vehicles. IET Power Electron. 2011, 4, 580–586. [Google Scholar] [CrossRef]
- Yan, X.; Li, W.; Xiao, X.; Zhang, C. Virtual battery management system. Power Electron. Technol. 2011, 45, 42–44. [Google Scholar]
- Bae, K.C.; Choi, S.C.; Kim, J.H.; Won, C.Y.; Jung, Y.C. LiFePO4 dynamic battery modeling for battery simulator. In Proceedings of the IEEE International Conference on Industrial Technology, Busan, South Korea, 26 February–1 March 2014. [Google Scholar]
- Roiu, D.; Primon, A.; Rossella, M.; Ornato, M. 2V battery modeling: Model development, simulation and validation. In Proceedings of the International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017. [Google Scholar]
- Lee, J.; Ahn, J.H.; Lee, B.K. A novel li-ion battery pack modeling considerging single cell information and capacity variation. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 5242–5247. [Google Scholar]
- Cheng, L.; Tang, A.H. Simplification and Efficient Simulation of Electrochemical Model for Li-ion Battery in EV. Energy Procedia 2016, 104, 68–73. [Google Scholar]
- Schellenberg, S.; Berndt, R.; Eckhoff, D.; German, R. Computationally inexpensive battery model for the microscopic simulation of electric vehicles. In Proceedings of the IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar]
- Li, J.W.; Mazzola, M.S. Accurate battery pack modeling for automotive applications. J. Power Sources 2013, 237, 215–228. [Google Scholar] [CrossRef]
- Huang, Q.; Sun, M.; Zou, X.; Xiong, W. A Dynamic modeling of power battery. Autom. Electr. Power Syst. 2014, 38, 71–77. [Google Scholar]
- Li, J.; Gao, F.; Yan, G.; Zhang, T.; Li, J. Modeling and SOC estimation of lithium iron phosphate battery considering capacity loss. Prot. Control Mod. Power Syst. 2018, 3, 61–69. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K. Ho Fai Ho Battery-Management System (BMS) and SOC Development for Electrical Vehicles. IEEE Trans. Veh. Technol. 2011, 60, 76–88. [Google Scholar] [CrossRef]
- Gregory, L.P. Extended Kalman filtering for battery Mana-gementsystems of LiPB-based HEV battery packs: Part 2.modeling and identification. J. Power Sources 2014, 134, 262–276. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value |
|---|---|
| Input current (A) | 30 |
| Output voltage (V) | 350 |
| Cascading-side voltage (V) | 800 |
| Reference value of input voltage (V) | 300–600 |
| Inductance (mH) | 0.5 |
| Input-side capacitance (μF) | 2200 |
| Cascading-side capacitance (μF) | 2200 |
| Output-side capacitance (μF) | 2200 |
| Switch frequency of IGBT (kHz) | 20 |
| Parameters | Numerical Value |
|---|---|
| Input voltage (A) | 400 |
| Output voltage (V) | 350 |
| Cascading-side voltage (V) | 800 |
| Reference value of input current (A) | 80–130 |
| Inductance (mH) | 0.5 |
| Input-side capacitance (μF) | 2200 |
| Cascading-side capacitance (μF) | 2200 |
| Output-side capacitance (μF) | 2200 |
| Switch frequency of IGBT (kHz) | 20 |
| Parameters | Numerical Value |
|---|---|
| Input voltage (A) | 400 |
| Output voltage (V) | 350 |
| Cascading-side voltage (V) | 900 |
| Reference value of input power (kW) | 40–65 |
| Inductance (mH) | 0.5 |
| Input-side capacitance (μF) | 2200 |
| Cascading-side capacitance (μF) | 2200 |
| Output-side capacitance (μF) | 2200 |
| Switch frequency of IGBT (kHz) | 20 |
| Parameters | Numerical Value |
|---|---|
| Input current (A) | 30 |
| Output voltage (V) | 350 |
| Cascading-side voltage (V) | 800 |
| Reference value of load resistance (Ω) | 8–18 |
| Inductance (mH) | 0.5 |
| Input-side capacitance (μF) | 2200 |
| Cascading-side capacitance (μF) | 2200 |
| Output-side capacitance (μF) | 2200 |
| Switch frequency of IGBT (kHz) | 20 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Wang, L.; Chai, Z.; Zhao, S.; Liu, Z.; Sun, X. Electric Vehicle Battery Simulation System for Mobile Field Test of Off-Board Charger. Energies 2019, 12, 3025. https://doi.org/10.3390/en12153025
Yan X, Wang L, Chai Z, Zhao S, Liu Z, Sun X. Electric Vehicle Battery Simulation System for Mobile Field Test of Off-Board Charger. Energies. 2019; 12(15):3025. https://doi.org/10.3390/en12153025
Chicago/Turabian StyleYan, Xiangwu, Ling Wang, Zhichao Chai, Shuaishuai Zhao, Zisheng Liu, and Xuewei Sun. 2019. "Electric Vehicle Battery Simulation System for Mobile Field Test of Off-Board Charger" Energies 12, no. 15: 3025. https://doi.org/10.3390/en12153025