An Integrated Design Approach for LCL-Type Inverter to Improve Its Adaptation in Weak Grid

 ,
,
Abstract
:1. Introduction
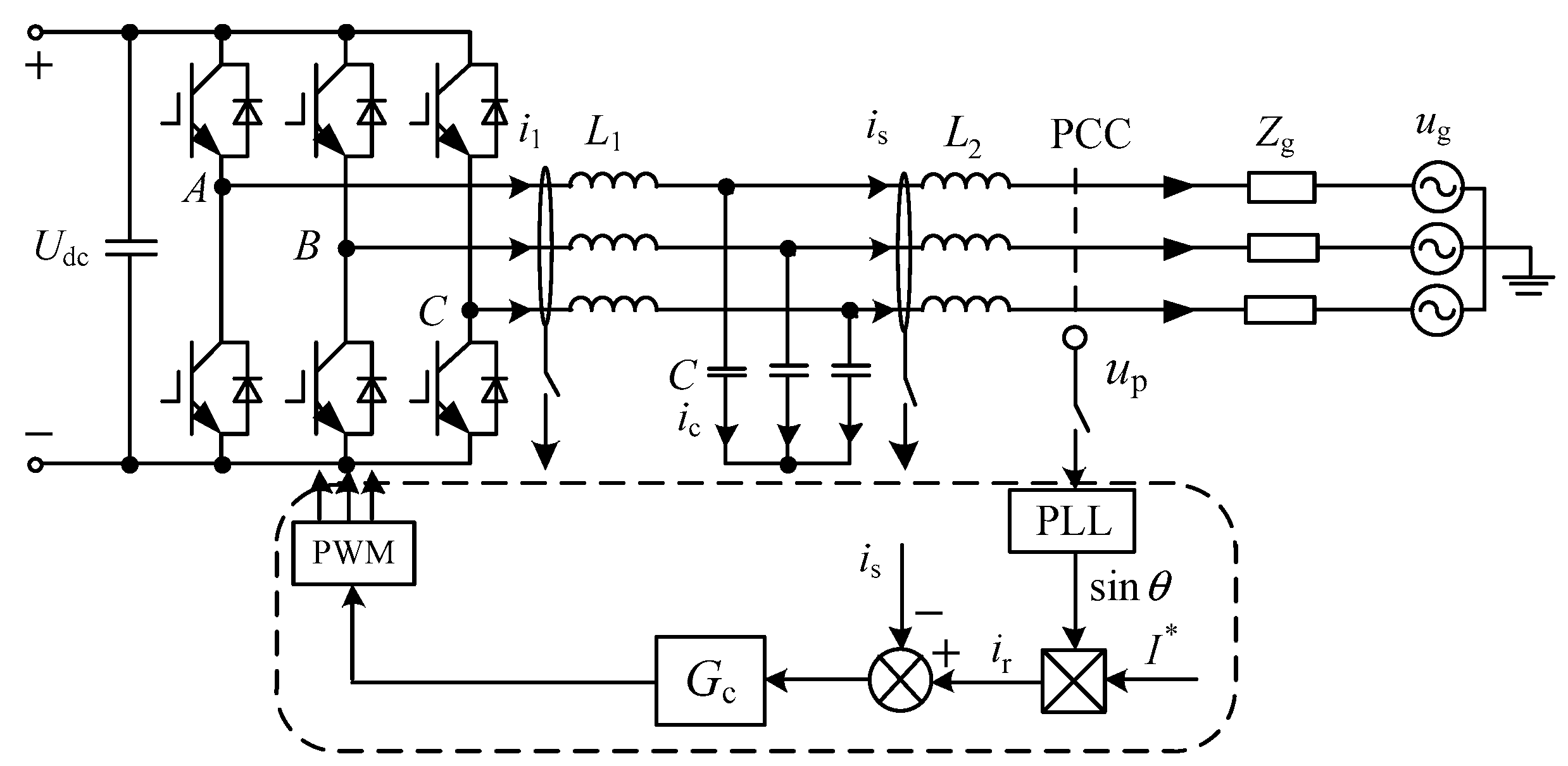
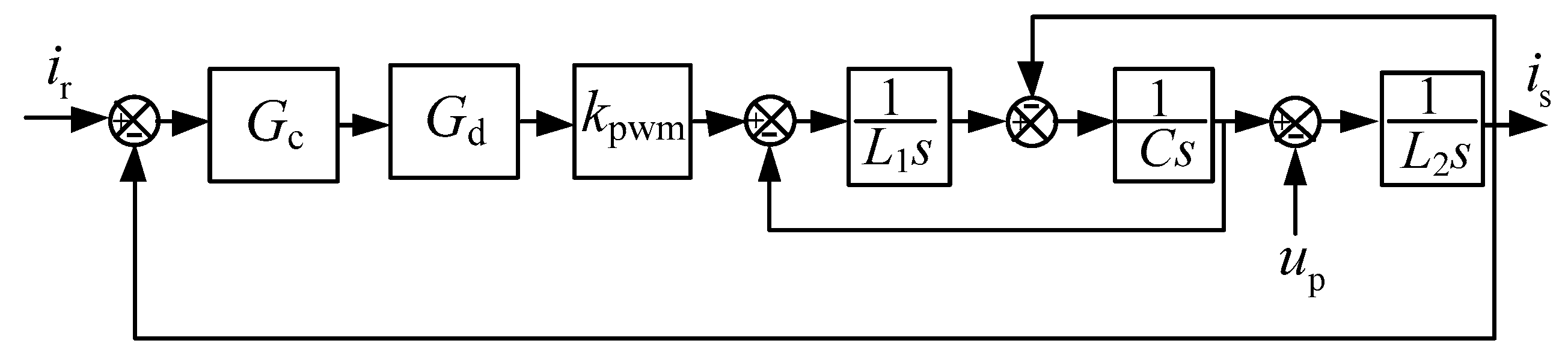
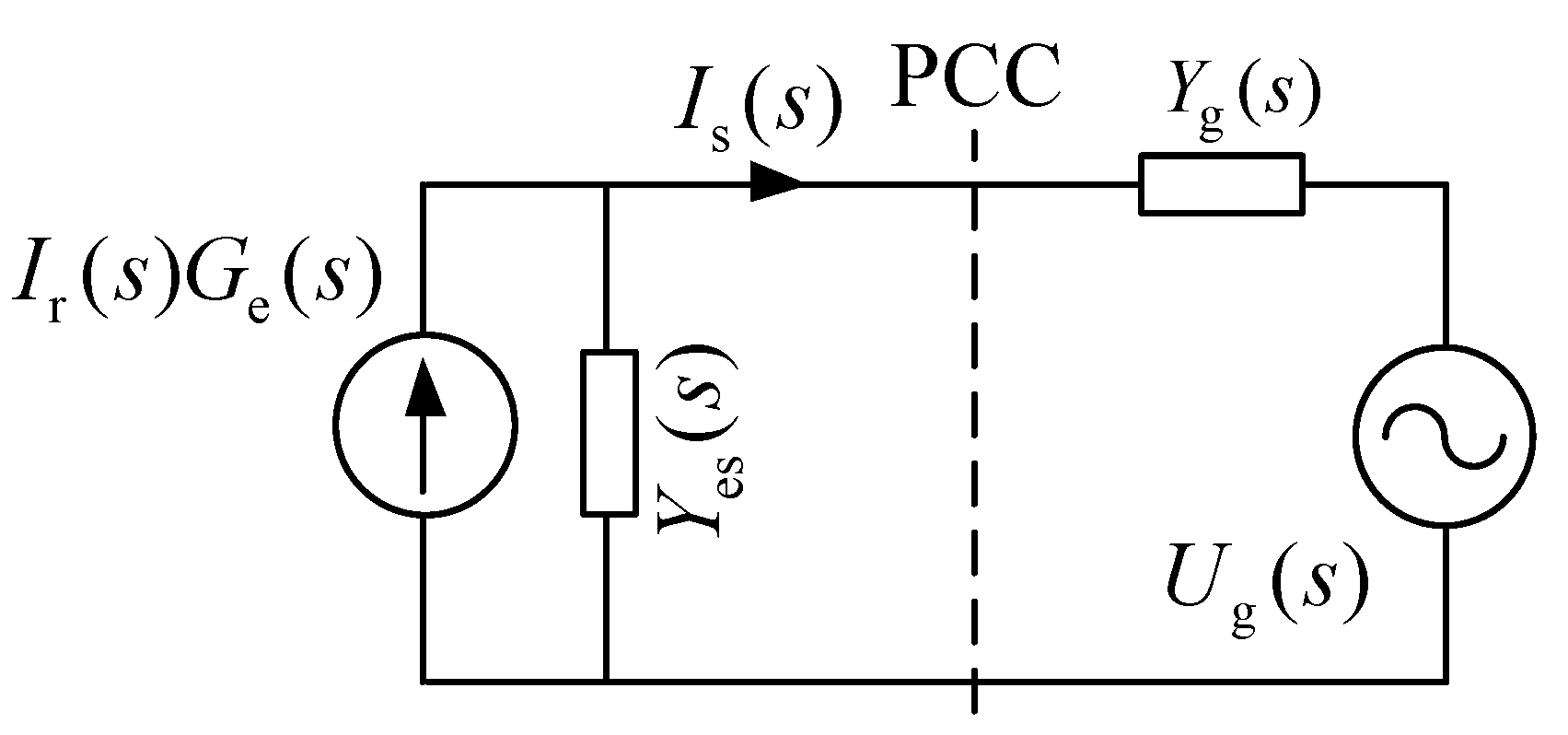
2. System Modeling and Stability Constraint
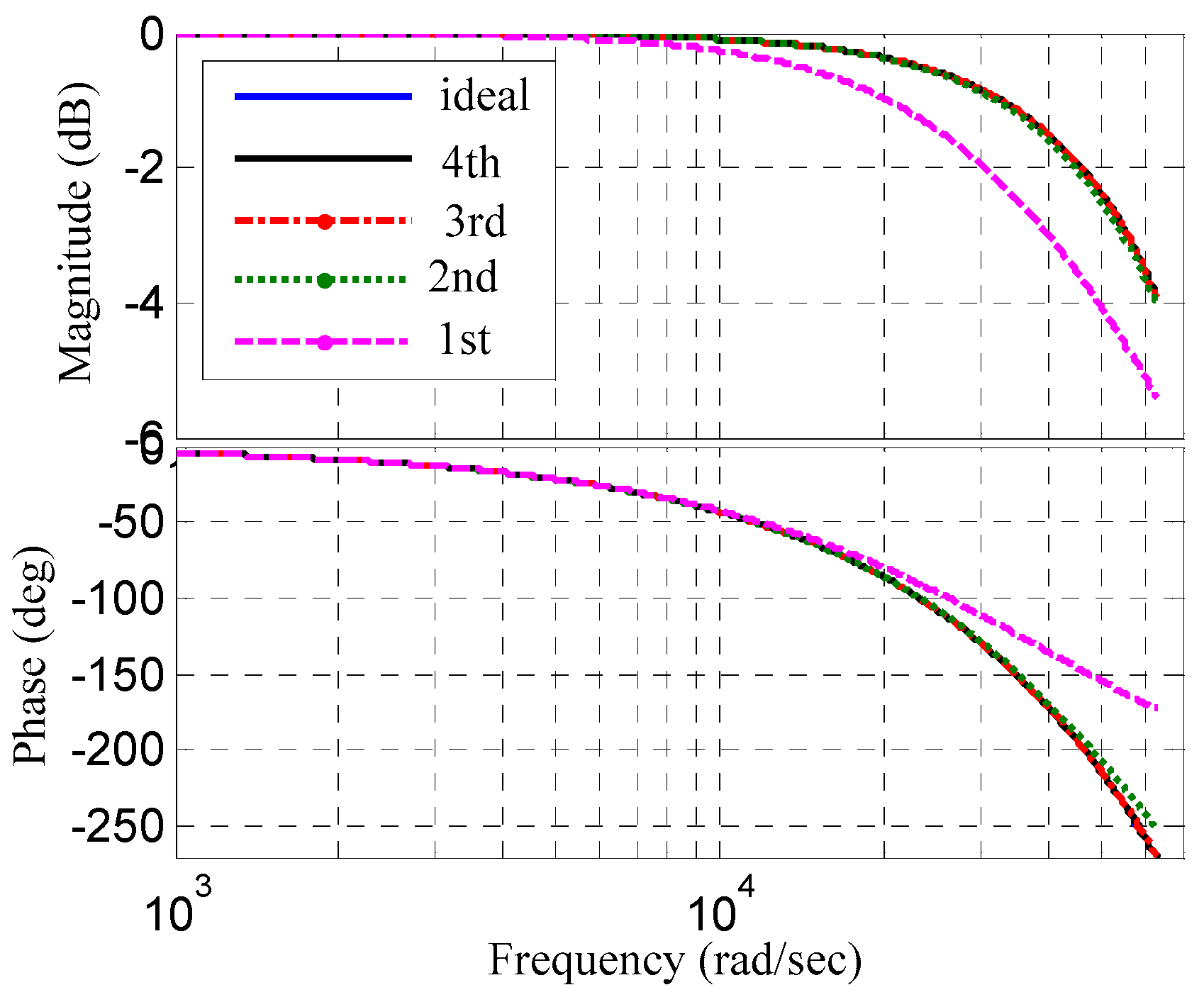
3. Frequency Response Analysis
4. Integrated Design Method
4.1. Design ωres and ωc According to Stability Margin Constraints of Gos
4.2. Design ωr1 and kp According to Phase Constraints of Zes
4.3. LCL Filter Computation According to Normalization Parameters
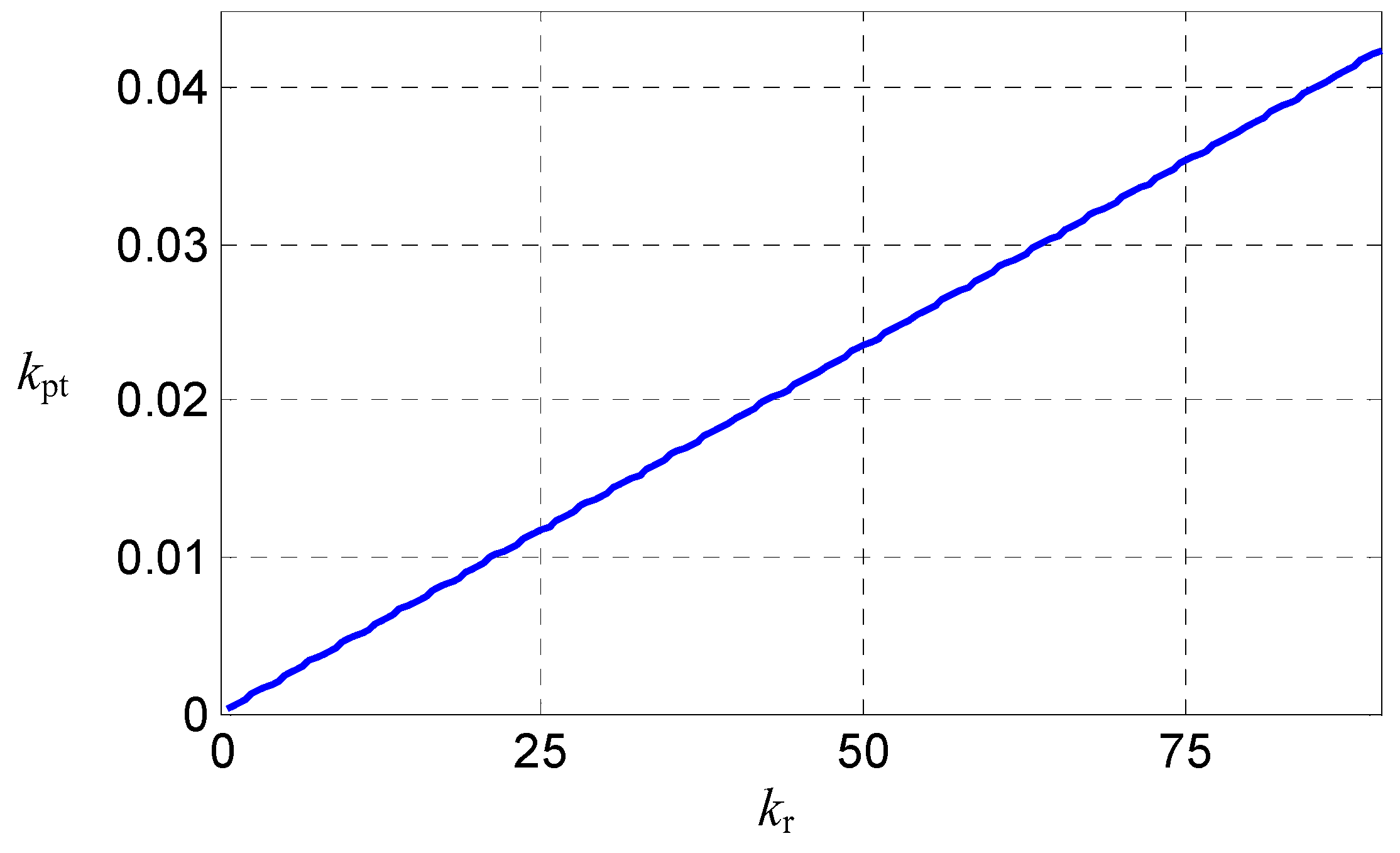
4.4. Design of kr
4.5. Detailed Design Procedure
- (1)
- Initialize the power converter parameters: the rated power Pn, rated ac voltage Ug, fundamental frequency f0, dc-link voltage Udc, sampling frequency fs, and the switching frequency fsw.
- (2)
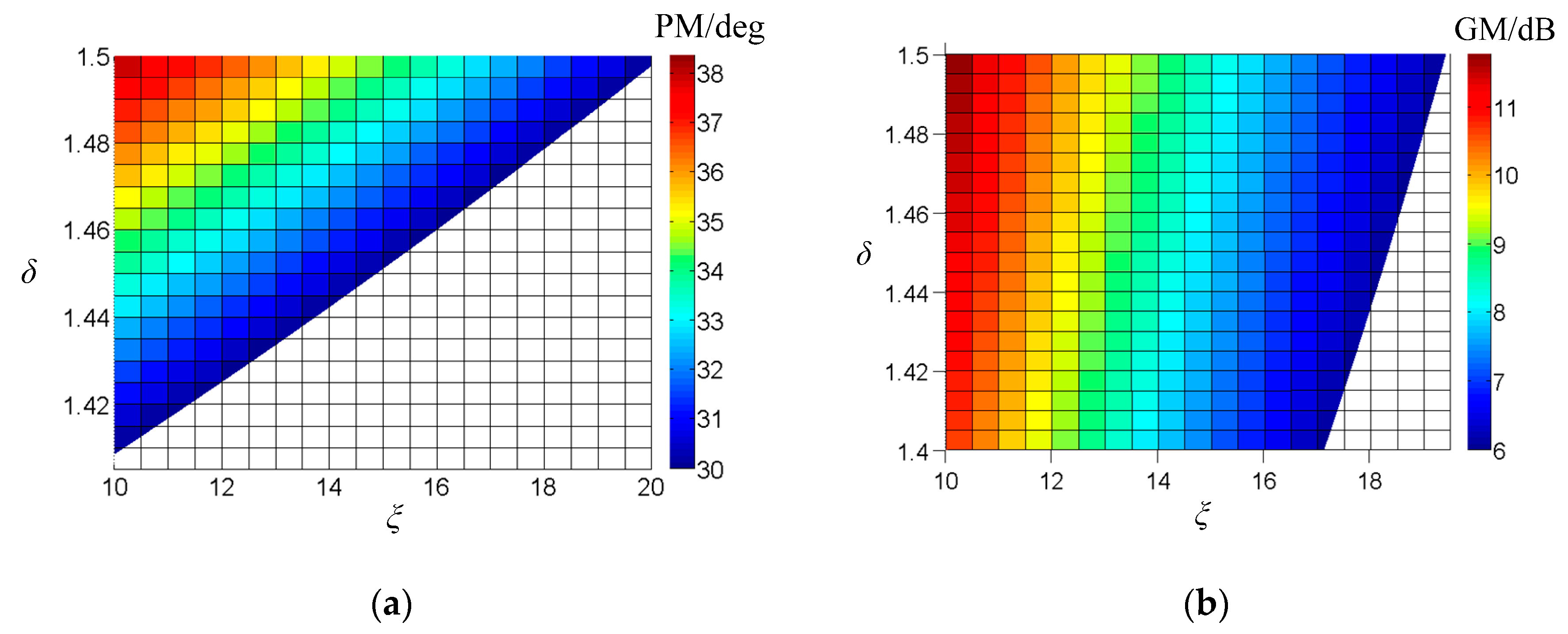
- Refer to Figure 7 to obtain stability margins as large as possible. Set δ as 1.5.
- (3)
- According to Figure 7, ξ should be selected from (10, 19.4) for δ = 1.5 to satisfy the stability margin, PM > 30° and GM > 6 dB. The final ξ should be selected according to the desired stability margins and bandwidth.
- (4)
- Select β from (βs1, βs2) and β should be close to βs1.
- (5)
- Compute λp from Equation (20). Select L1 from Equation (24) near the lower bound.
- (6)
- Calculate C using Equation (25), verify that Equation (26) is satisfied, and obtain L2 from Equation (27).
- (7)
- Select kr according to Equation (31).
5. Case Study
5.1. Parameter Design
- (1)
- Start with Pn = 500 kW, fs = 16 kHz, Udc = 700 V, Ug = 220 V, and fsw = 8 kHz.
- (2)
- δ is set as 1.5 in order to have the stability margins as large as possible.
- (3)
- ξ is set as 15 to obtain enough bandwidth and stability margins.
- (4)
- According to Equations (21) and (22) the range of β is calculated as (1.23, 1.28). A tradeoff between L2 and λp yields β = 1.23.
- (5)
- Then λp is calculated as 0.82 and the lower bound of L1 is 68 μH according to Equation (24). L1 is set as 70 μH.
- (6)
- C is calculated as 33.6μF, which is less than the upper bound of 548 μF from Equation (26) and L2 as 143.7 μH.
- (7)
- The range of kr is (0.2828, 1.47) obtained by Equation (31). kr is set as 1. Additionally, kp is calculated as 0.0029.
5.2. Performance Evaluation
6. Simulation and Experimental Results
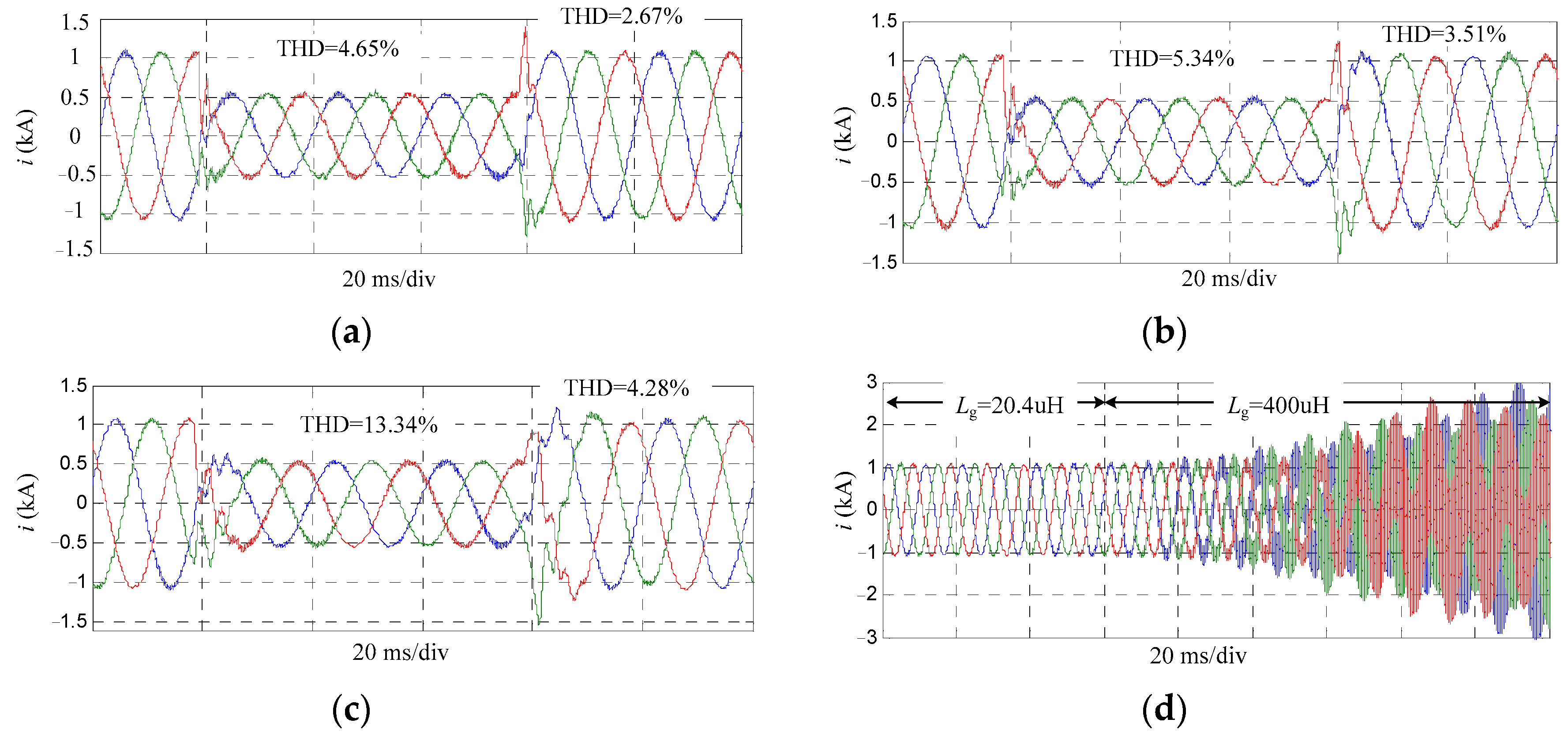
6.1. Simulation Results
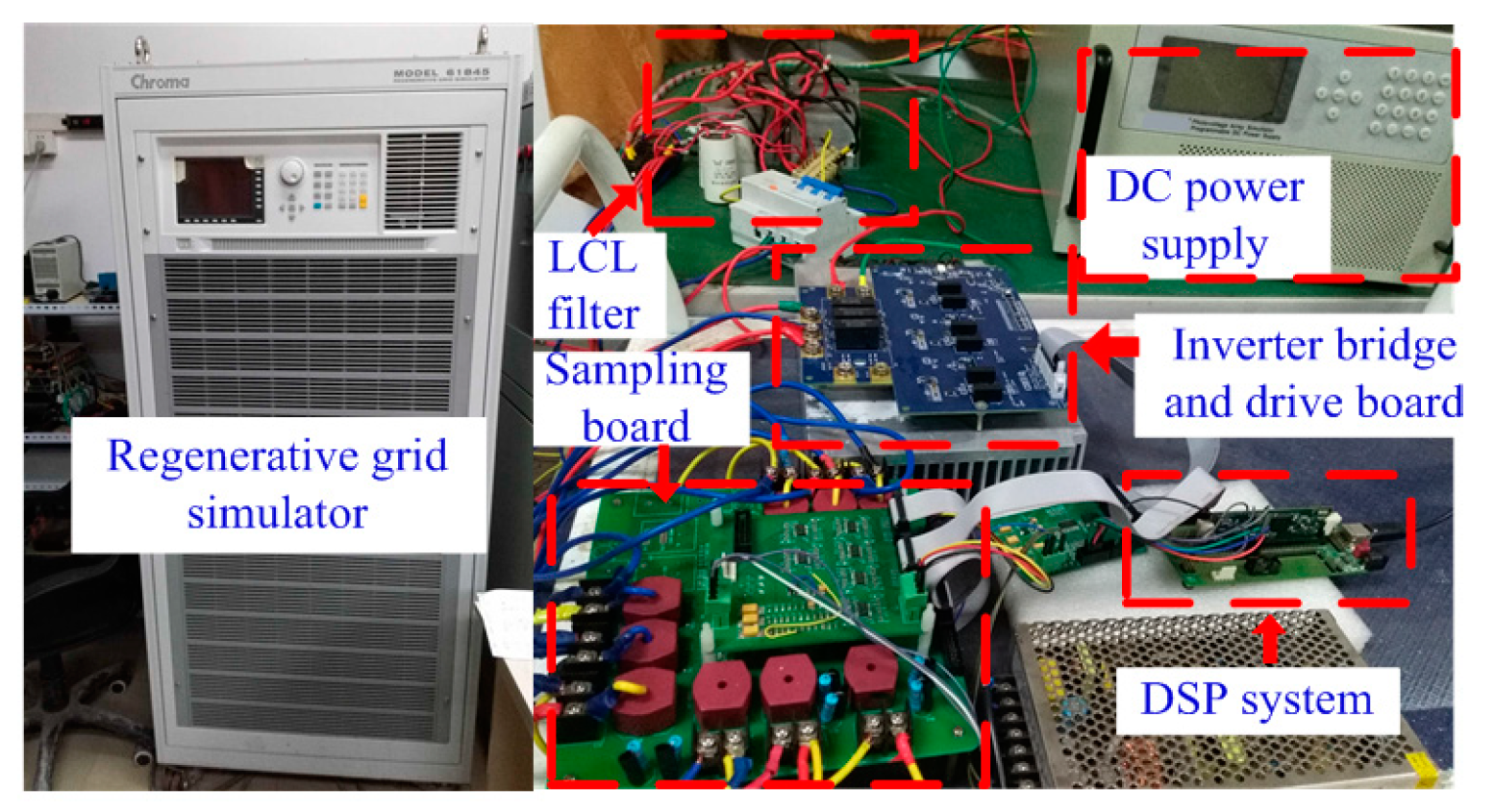
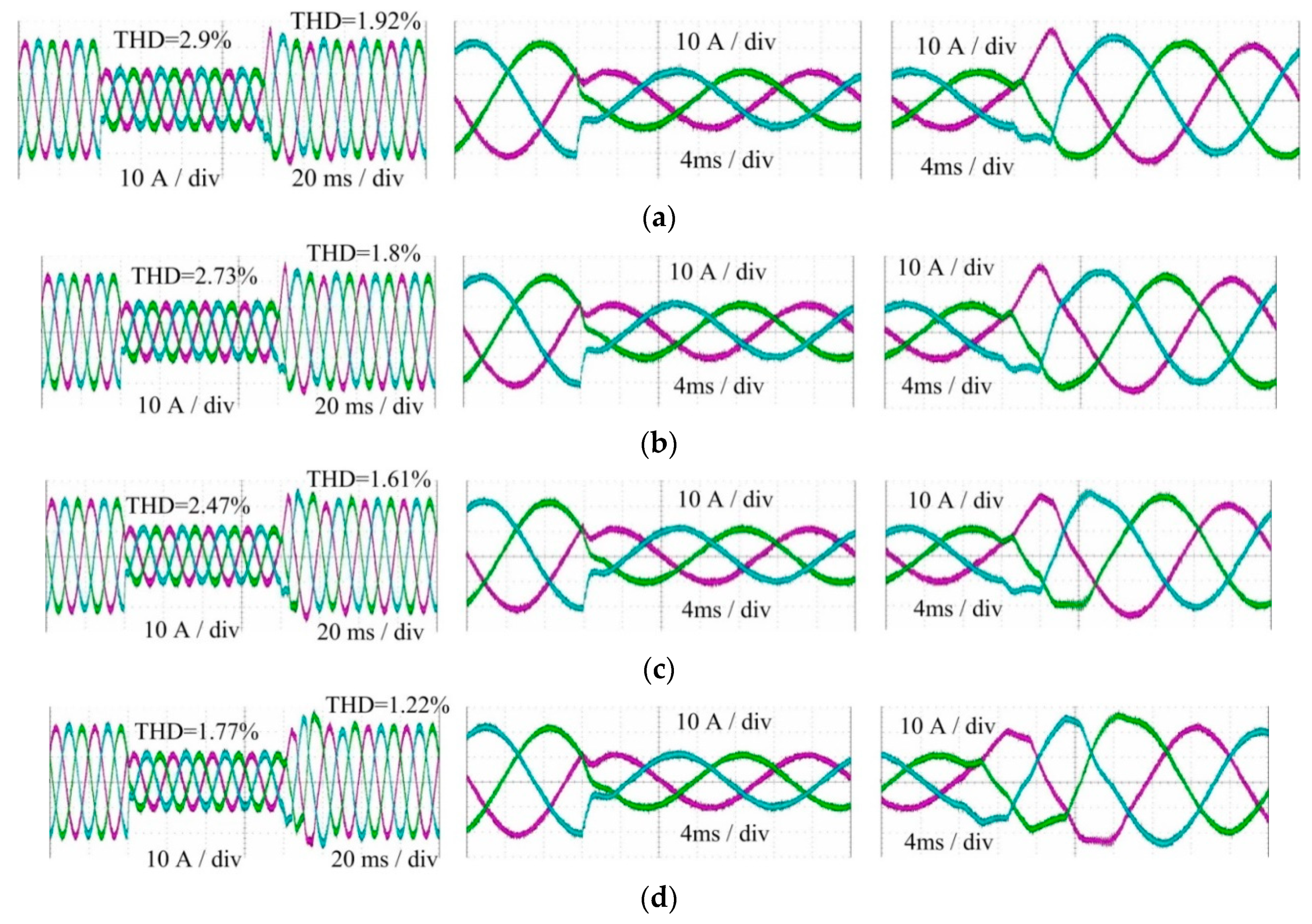
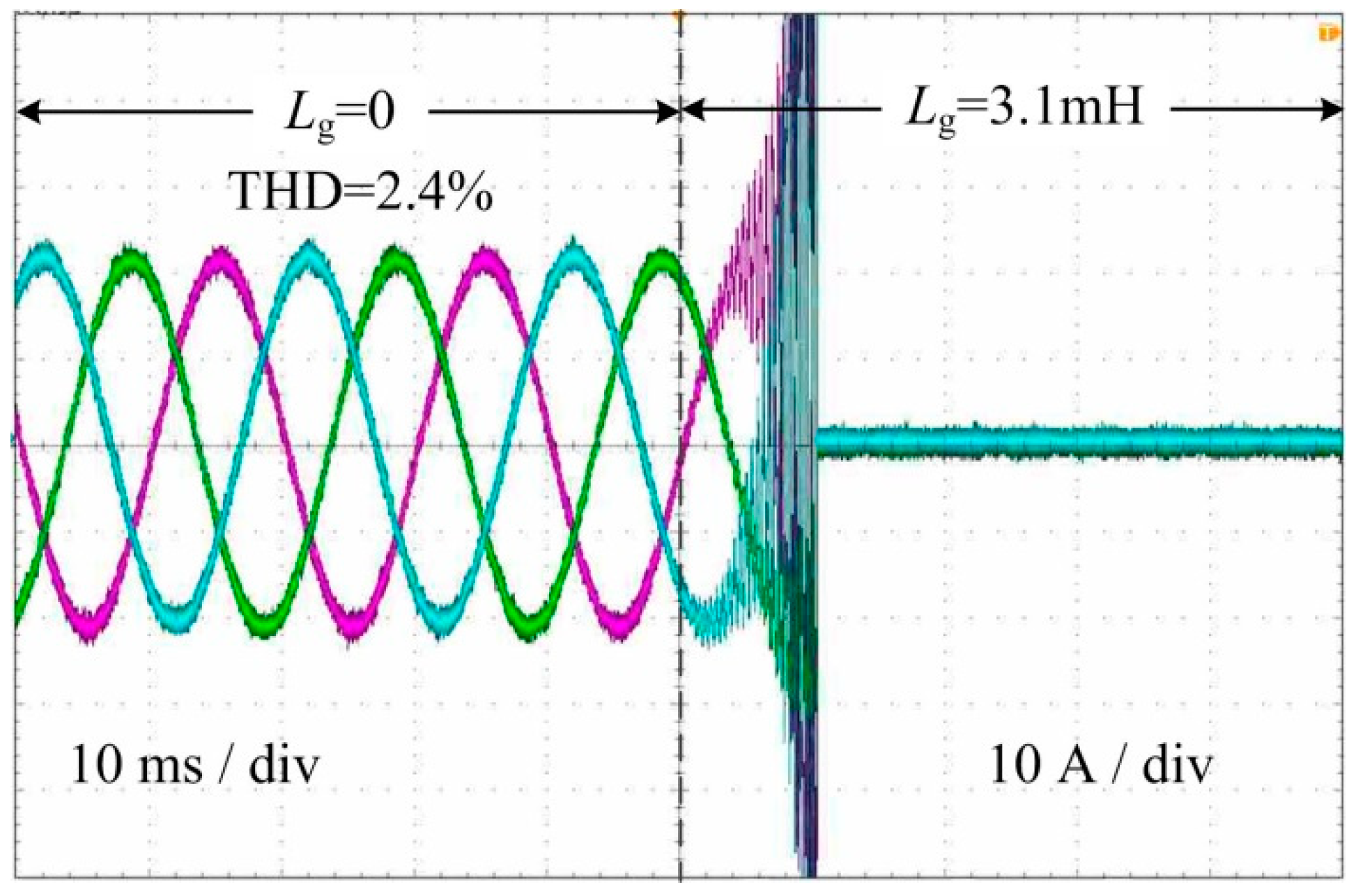
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Carrasco, J.; Franquelo, L.G.; Bialasiewicz, J.; Galvan, E.; PortilloGuisado, R.; Prats, M.; Leon, J.I.; Moreno-Alfonso, N.; Prats, M.A.M. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Guan, Y.; Wang, Y.; Xie, Y.; Liang, Y.; Lin, A.; Wang, X. The Dual-Current Control Strategy of Grid-Connected Inverter with LCL Filter. IEEE Trans. Power Electron. 2019, 34, 5940–5952. [Google Scholar] [CrossRef]
- Huang, X.; Wang, K.; Fan, B.; Yang, Q.; Li, G.J.; Xie, D.; Crow, M.L. Robust Current Control of Grid-tied Inverters for Renewable Energy Integration under Non-Ideal Grid Conditions. IEEE Trans. Sustain. Energy 2019. [Google Scholar] [CrossRef]
- Goh, H.; Armstrong, M.; Zahawi, B. Adaptive control technique for suppression of resonance in grid-connected PV inverters. IET Power Electron. 2019, 12, 1479–1486. [Google Scholar] [CrossRef]
- Gulur, S.; Iyer, V.M.; Bhattacharya, S. A Dual Loop Current Control Structure with Improved Disturbance Rejection for Grid Connected Converters. IEEE Trans. Power Electron. 2019, 34, 10233–10244. [Google Scholar] [CrossRef]
- Juntunen, R.; Korhonen, J.; Musikka, T.; Smirnova, L.; Pyrhönen, O.; Silventoinen, P. Identification of resonances in parallel connected grid Inverters with LC- and LCL-filters. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Charlotte, NC, USA, 15–19 March 2015; pp. 2122–2127. [Google Scholar]
- Agorreta, J.L.; Borrega, M.; Lopez, J.; Marroyo, L. Modeling and control of N-paralleled grid-connected inverters with LCL filters coupled due to grid impedance in PV plants. IEEE Trans. Power Electron. 2011, 26, 770–785. [Google Scholar] [CrossRef]
- Lu, M.; Wang, X.; Loh, P.C.; Blaabjerg, F. Resonance interaction of multiparallel grid-connected inverters with LCL filter. IEEE Trans. Power Electron. 2017, 32, 894–899. [Google Scholar] [CrossRef]
- Yoon, C.; Bai, H.; Beres, R.; Wang, X.; Bak, C.; Blaabjerg, F. Harmonic stability assessment for multiparalleled grid-connected inverters. IEEE Trans. Sustain. Energy 2016, 7, 1388–1396. [Google Scholar] [CrossRef]
- Jia, Y.; Zhao, J.; Fu, X. Direct grid current control of LCL-filtered grid-connected inverter mitigating grid voltage disturbance. IEEE Trans. Power Electron. 2014, 29, 1532–1541. [Google Scholar]
- Zheng, C.; Zhou, L.; Yu, X.; Li, B.; Liu, J. Online phase margin compensation strategy for a grid-tied inverter to improve its robustness to grid impedance variation. IET Power Electron. 2016, 9, 611–620. [Google Scholar] [CrossRef]
- Pena-Alzola, R.; Liserre, M.; Blaabjerg, F.; Ordonez, M.; Kerekes, T. A self-commissioning notch filter for active damping in a three-phase LCL-filter-based grid-tie converter. IEEE Trans. Power Electron. 2014, 29, 6754–6761. [Google Scholar] [CrossRef]
- Yao, W.; Yang, Y.; Zhang, X.; Blaabjerg, F.; Loh, P.C. Design and analysis of robust active damping for LCL filters using digital notch filters. IEEE Trans. Power Electron. 2017, 32, 2360–2375. [Google Scholar] [CrossRef]
- Yang, D.; Ruan, X.; Wang, H. Impedance shaping of the grid-connected inverter with LCL filter to improve its adaptability to the weak grid condition. IEEE Trans. Power Electron. 2014, 29, 5795–5805. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Wang, S. Impedance-phased dynamic control method for grid-connected inverters in a weak grid. IEEE Trans. Power Electron. 2017, 32, 274–283. [Google Scholar] [CrossRef]
- Céspedes, M.; Sun, J. Impedance shaping of three-phase grid-parallel voltage-source converters. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 754–760. [Google Scholar]
- Céspedes, M.; Sun, J. Adaptive control of grid-connected inverters based on online grid impedance measurements. IEEE Trans. Power Electron. 2014, 5, 516–523. [Google Scholar] [CrossRef]
- Xu, J.; Xie, S.; Tang, T. Improved control strategy with grid-voltage feedforward for LCL-filter-based inverter connected to weak grid. IET Power Electron. 2014, 7, 2660–2671. [Google Scholar] [CrossRef]
- He, Y.; Wang, X.; Ruan, X.; Pan, D.; Xu, X.; Liu, F. Capacitor-Current Proportional-Integral Positive Feedback Active Damping for LCL-Type Grid-Connected Inverter to Achieve High Robustness Against Grid Impedance Variation. IEEE Trans. Power Electron. 2019. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, W.; Shuai, Z.; Wang, X.; Luo, A.; Chung, H.S.-H.; Blaabjerg, F.; Chung, H.S.H. Principle and Robust Impedance-Based Design of Grid-tied Inverter with LLCL-Filter under Wide Variation of Grid-Reactance. IEEE Trans. Power Electron. 2019, 34, 4362–4374. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Liserre, M.; Chen, Z.; He, J.; Li, Y. An active damper for stabilizing power-electronics-based AC systems. IEEE Trans. Power Electron. 2014, 29, 3318–3329. [Google Scholar] [CrossRef]
- Bao, C.; Ruan, X.; Wang, X.; Li, W.; Pan, D.; Weng, K. Step-by-step controller design for LCL-type grid-connected inverter with capacitor–current-feedback active-damping. IEEE Trans. Power Electron. 2014, 29, 1239–1253. [Google Scholar]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Optimized controller design for LCL-type grid-connected inverter to achieve high robustness against grid-impedance variation. IEEE Trans. Ind. Electron. 2015, 62, 1537–1547. [Google Scholar] [CrossRef]
- Saïd-Romdhane, M.B.; Naouar, M.W.; Slama-Belkhodja, I.; Monmasson, E. Robust active damping methods for LCL filter-based grid-connected converters. IEEE Trans. Power Electron. 2017, 32, 6739–6750. [Google Scholar] [CrossRef]
- Freijedo, F.D.; Rodriguez-Diaz, E.; Golsorkhi, M.S.; Vasquez, J.C.; Guerrero, J.M. A root-locus design methodology derived from the impedance/admittance stability formulation and its application for LCL grid-connected converters in wind turbines. IEEE Trans. Power Electron. 2017, 32, 8218–8228. [Google Scholar] [CrossRef]
- Gabe, I.J.; Montagner, V.F.; Pinheiro, H. Design and implementation of a robust current controller for VSI connected to the grid through an LCL filter. IEEE Trans. Power Electron. 2009, 24, 1444–1452. [Google Scholar] [CrossRef]
- Kahrobaeian, A.; Mohamed, Y.A.-R.I. Robust single-loop direct current control of LCL-filtered converter-based DG units in grid-connected and autonomous microgrid modes. IEEE Trans. Power Electron. 2014, 29, 5605–5619. [Google Scholar] [CrossRef]
- Pena-Alzola, R.; Liserre, M.; Blaabjerg, F.; Ordonez, M.; Yang, Y. LCL-filter design for robust active damping in grid-connected converters. IEEE Trans. Ind. Inf. 2014, 10, 2192–2203. [Google Scholar] [CrossRef]
- Wu, T.-F.; Misra, M.; Lin, L.-C.; Hsu, C.-W.; Lin, L.-C. An improved resonant frequency based systematic LCL filter design method for grid-connected inverter. IEEE Trans. Ind. Electron. 2017, 64, 6412–6421. [Google Scholar] [CrossRef]
- Buso, S.; Mattavelli, P. Digital Control in Power Electronics; Morgan & Claypool: Seattle, WA, USA, 2006; pp. 17–64. [Google Scholar]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Reznik, A.; Simoes, M.G.; Al-Durra, A.; Muyeen, S.M. LCL filter design and performance analysis for grid-Interconnected systems. IEEE Trans. Ind. Appl. 2014, 50, 1225–1232. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Jalili, K.; Bernet, S. Design of LCL filters of active-front-end two level voltage-source converters. IEEE Trans. Ind. Electron. 2009, 56, 1674–1689. [Google Scholar] [CrossRef]
- Channegowda, P.; John, V. Filter optimization for grid interactive voltage source inverters. IEEE Trans. Ind. Electron. 2010, 57, 4106–4114. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Constraint | Design Guideline |
|---|---|---|
| δ, ξ | Region shown in Figure 7 | Consider the desired bandwidth and make PM and GM as large as possible |
| β | (βs1, βs2) | β should be close to βs1 |
| λp | -- | |
| L1 | L1 should be as close to the lower bound as possible | |
| C | ||
| L2 | -- | |
| kp | -- | |
| kr | kr should be as close to the upper bound as possible |
| Item | L1 (μH) | C (μF) | L2 (μH) | kp | kr |
|---|---|---|---|---|---|
| new inverter | 70 | 33.6 | 143.7 | 0.0029 | 1 |
| conventional inverter | 70 | 40 | 75 | 0.0014 | 0.73 |
| Item | L1 (mH) | C (μF) | L2 (mH) | kp | kr |
|---|---|---|---|---|---|
| new inverter | 1.5 | 1.0 | 4.3 | 0.0776 | 18 |
| conventional inverter | 4.0 | 2.0 | 0.7 | 0.06 | 35 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, C.; Liu, Y.; Liu, S.; Li, Q.; Dai, S.; Tang, Y.; Zhang, B.; Mao, M. An Integrated Design Approach for LCL-Type Inverter to Improve Its Adaptation in Weak Grid. Energies 2019, 12, 2637. https://doi.org/10.3390/en12132637
Zheng C, Liu Y, Liu S, Li Q, Dai S, Tang Y, Zhang B, Mao M. An Integrated Design Approach for LCL-Type Inverter to Improve Its Adaptation in Weak Grid. Energies. 2019; 12(13):2637. https://doi.org/10.3390/en12132637
Chicago/Turabian StyleZheng, Chen, Yajuan Liu, Shuming Liu, Qionglin Li, Shuangyin Dai, Yuzheng Tang, Bo Zhang, and Mingxuan Mao. 2019. "An Integrated Design Approach for LCL-Type Inverter to Improve Its Adaptation in Weak Grid" Energies 12, no. 13: 2637. https://doi.org/10.3390/en12132637