1. Introduction
With the application of distributed energy resources, the penetration rate of renewable energy sources has been greatly increased. While bringing low carbon and economic benefits, intermittency and poor power quality also appear. Therefore, the concept of microgrid is proposed, which combines distributed energy resources with utility grid to effectively overcome these shortcomings [
1,
2,
3]. In order to guarantee the power quality of demand side, many standards have been proposed, especially for harmonic problems. Current harmonic distortion increases the additional losses of electrical equipment, overheating the equipment, reducing equipment efficiency and utilization [
4,
5,
6].
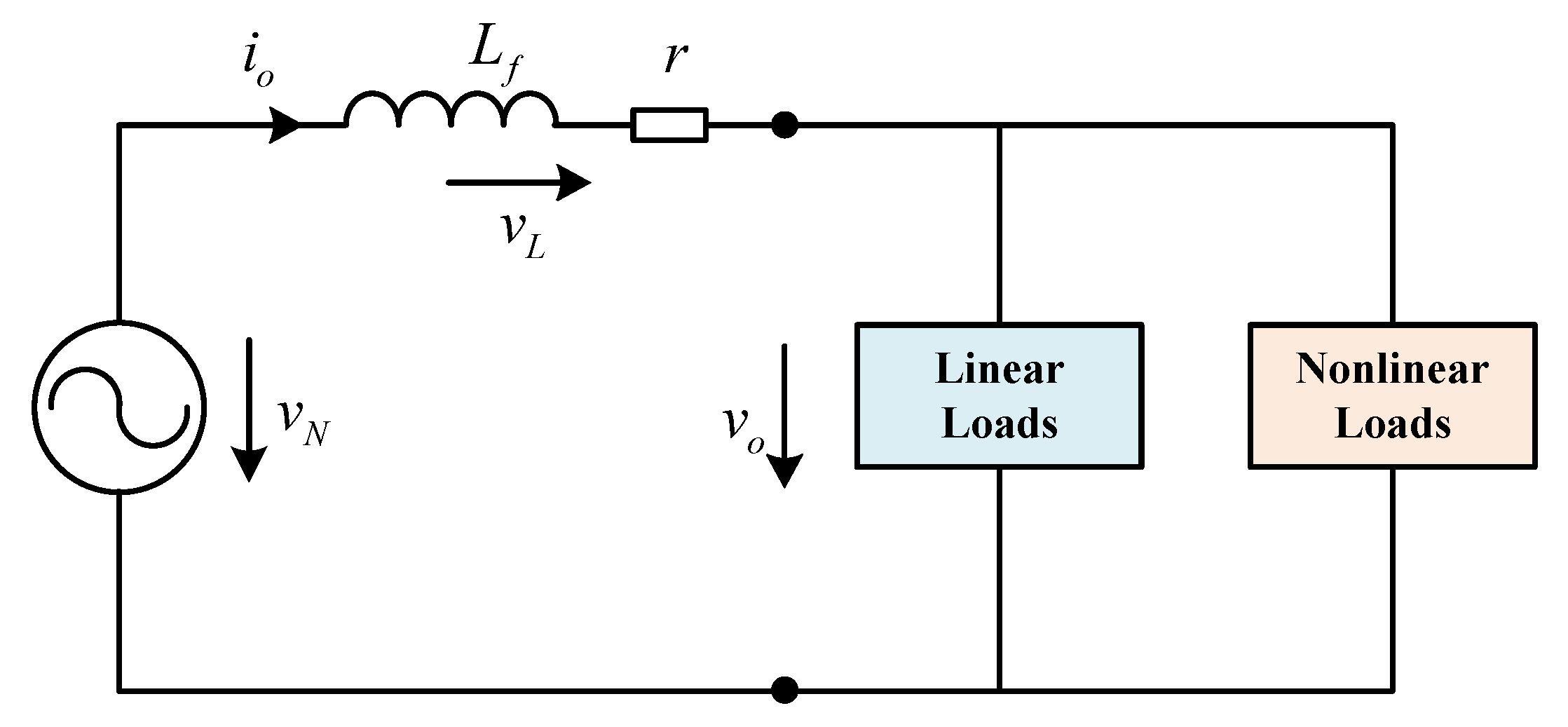
Various researches focus on the harmonic problem of the microgrid. There are two main sources of harmonics in microgrids: power electronic devices and nonlinear loads. Power electronic devices have been widely used in many places, such as inverters, rectifiers, static compensators, etc. The switching of transistors generates high frequency harmonics, which can be suppressed by LC or LCL filter. However, the harmonics generated by nonlinear loads are difficult to be eliminated only by the design of the filter circuit. In an isolated island microgrid, the main reason for generating output voltage harmonics is that nonlinear loads is connected to the inverter terminal to make the output current distorted. When these distorted current flow through the linear electrical components, the corresponding harmonic voltage drop is generated, which eventually leads to the distortion of the inverter output voltage waveform. In order to reduce harmonics and improve system efficiency, harmonic compensation strategies have been extensively studied.
The existing harmonic control researches can be mainly divided into two categories: one is to use the additional compensation devices; the other is to use the harmonic current detection and control algorithm for feedforward compensation without additional compensation devices. Active power filter (APF) is a mature harmonic compensation device, it injects harmonic compensation current with equal magnitude and opposite phase into harmonic source [
7,
8,
9]. Authors in [
10] use the least mean squares (LMS, NLMS) and recursive least squares (RLS) algorithms for shunt APF to reduce the total harmonic distortion (THD). But this algorithm has a large computational burden. In [
11], a composite control method based on the combination of proportional integral (PI) control and fast repetitive control (FRC) is proposed, which can stabilize the output compensation current in 1/6 grid cycle. However, APF as an additional compensation device in the system, the loss and cost of the device are increased [
12,
13,
14].
Hence, a feedforward compensation strategy based on current detection and control algorithms without additional compensation equipments is considered. A closed loop control of the RMS value of each of the voltage harmonics using PI controller proposed in [
15]. The method can suppress each harmonic independently, but it needs to detect the amplitude and phase of each harmonic, and the compensation effect depends on the accuracy of the detection method. Authors in [
16] transforms the output voltage of the inverter to the
synchronous reference frame through the Park transform, and then uses the PI controller to track the reference values of fundamental voltage and harmonics. This method can effectively suppress certain subharmonics, but it needs to design the controller at each compensated harmonics, which makes the control structure complex and parameter tuning difficult. The use of virtual harmonic impedances has also been proposed to harmonic compensation in existing literature [
17,
18,
19]. Authors in [
20] proposes a control strategy employs negative virtual harmonic impedance to compensate for effect of line impedance on harmonic power delivery. Authors in [
21] propose a composite control strategy of PI and virtual harmonic impedance, and considers the time delay of system. Authors in [
22] replaces the PI controller of the fundamental voltage in [
21] with the PR controller, which improves the tracking accuracy of the feedback loop. However, the effects of the output inductance value fluctuation on the virtual harmonic impedance compensation effect are not solved in [
20,
21,
22]. Authors in [
23] propose adaptive virtual harmonic impedance based on the required voltage quality at the load bus, which solved the uncertainties of virtual harmonic impedances to some extent. But it requires additional calculations for virtual harmonic impedances.
The virtual harmonic impedance can compensate the specific harmonic effectively and simply, but the compensation effect of virtual harmonic impedance is very sensitive to the fluctuation of filter inductance. In order to solve this problem, a composite control strategy combining disturbance rejection control with the virtual harmonic impedance can be considered. At present, common disturbance rejection control strategies include active disturbance rejection control (ADRC), disturbance-observer-based control (DOBC), composite hierarchical antidisturbance control (CHADC) and disturbance accommodation control (DAC), etc. [
24]. Unlike many existing control methods, the ADRC does not require the accurate mathematical model of the plant. Therefore, ADRC has been paid more and more attention for its excellent engineering application and disturbance rejection performance, and has been applied in many industries [
25,
26,
27,
28]. Authors in [
29] proposes a robust active damping method based on the LADRC, to solve the control problem of LCL-filtered grid-connected Inverter in the case of disturbance and parameter uncertainty. A linear auto-disturbance rejection control method based on LCL type grid-connected inverter was proposed in [
30], which realized high rejection performance against external interference, internal decoupling and parameter variation.
On the basis of the existing research,
Section 2 of this paper firstly models and simplifies the inverter in the
synchronous reference frame, and then
Section 3.2 designs the LADRC controller structure through the relative order of the model and gives the parameter tuning method. In
Section 3.1, the virtual harmonic impedance is designed for the high harmonic components of output voltage and feedforward to the fundamental voltage control loop. In
Section 4, the stability analysis of LADRC controller and the validity analysis of virtual harmonic impedance are given in the frequency domain. Finally, the good performances of the proposed strategy are shown in
Section 5.
3. Proposed Control Method
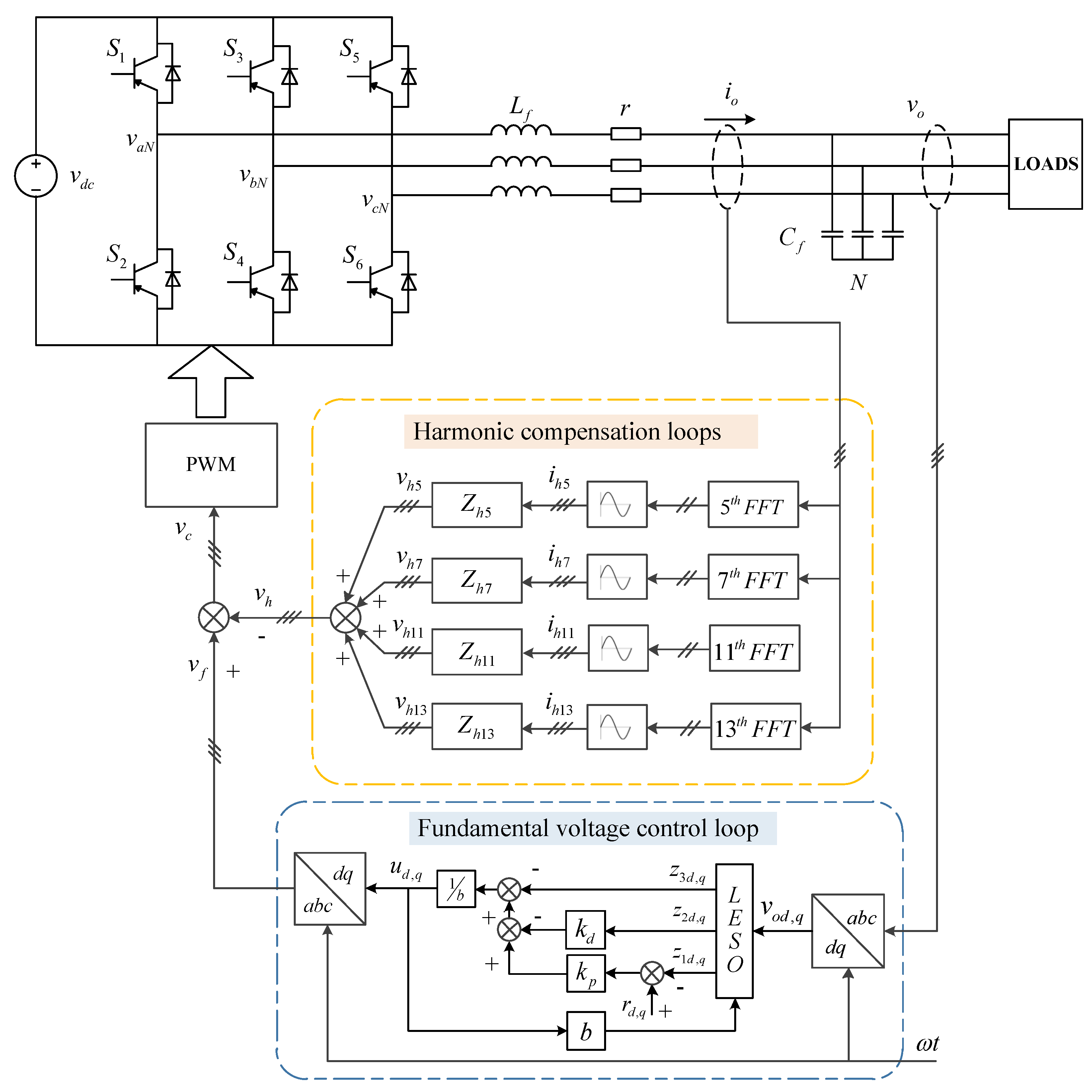
Figure 1 shows the diagram of proposed control, it consists of a fundamental voltage control loop and some specific frequency harmonic compensation loops. The fundamental voltage control loop adopts the LADRC controller in the
synchronous reference frame, and its output signal is
. Harmonic compensation loops works by shaping harmonic voltage drops
with harmonic currents and virtual harmonic impedances. The total output signal of controller is given as follows:
3.1. Virtual Harmonic Impedance Dsign
In harmonic compensation loops, the
nth harmonic component from the output current can be detected by Fourier transform. And then the
nth harmonic voltage drop is obtained by multiplying the
nth harmonic current by the
nth virtual harmonic impedance:
where
is the
nth harmonic current and
is the
nth virtual harmonic impedance to be designed. The harmonic voltage drop can be added to fundamental voltage control loop inversely. In this way, usually harmonics less than 50th can be compensated without additional compensation inverters.
In order to compensate the voltage drop across the output inductance of the inverter, the
should have the same amplitude and opposite phase to
:
where
is the output inductance of
nth harmonic. It consists of a filter inductor
and a parasitic resistance
r:
where
is the angular frequency of
nth harmonic componet.
There are many models of virtual harmonic impedance, such as a resistance, a series RL, a parallel RC, a series RC, etc. In this paper, the virtual harmonic impedance will be modeled as a series RL. This model was chosen because of its simple structure and same form as the output inductance, which simplifies the design process. According to formula (8), the transfer function of a series RL is:
where
,
,
,
is the fundamental frequency. The amplitude and phase of virtual harmonic impedance denotes as
K and
:
Hence, the calculation process of the virtual harmonic voltage drop can be equivalent to using a virtual harmonic impedance to perform a K gain and phase shift on the harmonic current.
3.2. LADRC Controller Design
This paper proposes the application of LADRC in the fundamental voltage control loop to ensure good tracking of the output voltage reference and robust stability with respect to parametric variations and disturbance. Compared with the PI controller, the proposed strategy has two advantages. One is that it can decouple the model (3) and achieve better transient performance when the load changes. The other is to reject the internal parameter variation and disturbance of the physical system so as to weaken the sensitivity of virtual harmonic impedance effectiveness to output inductance fluctuation.
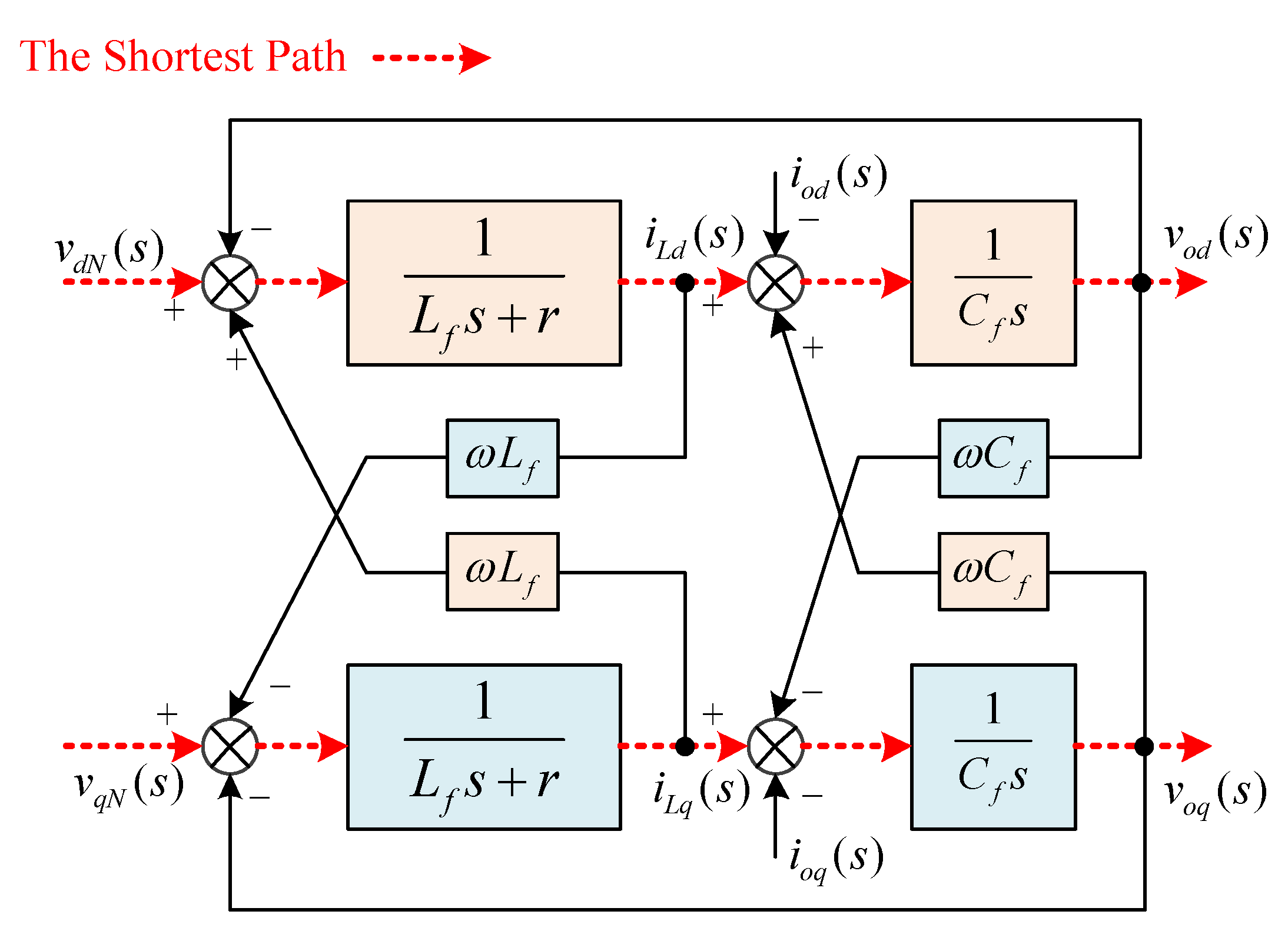
The first step of designing LADRC controller is to determine the relative order of the system. This section uses the shortest path method to obtain the relative order of the system, that is, to find a shortest path from the input to the output through the minimum number of integrators.
According to the system (3), the diagram of LC type inverter in
s domain can be drawn, as shown in
Figure 3. On
d-axis, the input of this system is
, the output is
, and the shortest path is shown in the red dotted line. There are two integrators on this path, so the the
d-axis system is a two-order model. Similarly, the system on the
q-axis is also a two-order model.
The system (3) can be written as a second-order plant in the time domain:
where
, it is the input gain of two integrators;
and
are the contributions to the output of something other than the input on the shortest path, they be called as total disturbance. The total disturbance includes external disturbances and internal disturbances, such as device parameter fluctuation, load changes, unmodelled dynamics, etc.
In order to simplify ADRC structure, Zhiqiang Gao uses linear gain instead of nonlinear gain, namely LADRC. In this way, the number of parameters is reduced, greatly simplifying the tuning process and providing convenience for engineering applications.
For system (12), a two-order LADRC controller can be designed in
Figure 1. LADRC consists of the linear extended state observer (LESO) and the linear state error feedback law (LSEF). LESO is responsible for accurately estimate the total disturbance. The LSEF is responsible for realization of the desired signal by using a feedback controller, such as linear PD. Hence, the effect of LADRC largely depends on the estimation accuracy of the total disturbance.
The controller form of
d-axis and
q-axis is the same, so plant (12) can be rewritten as a universal two-order state space model:
where
represents the output voltage
, it is defined as the first state
as usual; the second state
is derivative of
, which is
;
represents the total disturbance, which including the variations of the output inductance.
Letting a extended state
, the extended state system can be obtained:
Hence, the LESO can be written as:
where
is the estimated value of
,
is the observer gain
. With appropriate selection of
, the
, will track
. The transfer function of the three-order ESO is given by
The observer gains can be selected by bandwidth-parameterization method [
31], such that all the observer eigenvalues are placed at
, then
,
,
. Denote
as the observer bandwidth.
Base on the estimation of the state of the system, the linear PD controller is used to track the reference value
and the estimation of the total disturbance is subtracted from PD control law to compensate the disturbance. Hence, in the
s domain the transfer function of the LSEF can be expressed as:
The parameters and can also be selected by bandwidth-parameterization method, generally , . Denote as the observer bandwidth.
Substitute (15) into controlled plant results in:
Thus, the total disturbance will be eliminated once is approximately equal to f.
To obtain the transfer function of the LADRC controller, combine (16)–(18):
where
And then, the stability of LADRC controller and virtual harmonic impedance will be proved in the
Section 4.
4. Stability and Disturbance Rejection Analysis
In this section, the stability of the fundamental voltage control loop and the harmonic compensation loop is proved. Furthermore, a disturbance rejection analysis regarding to variations of the output LC filter parameters is shown.
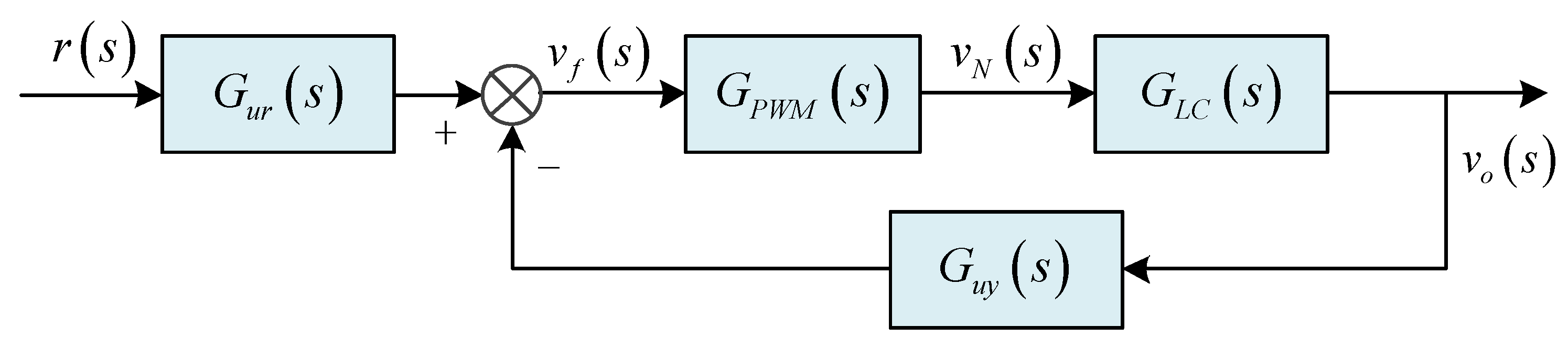
The block diagram of the fundamental voltage control loop transfer function under no load conditions is shown in
Figure 4. Where
is the voltage of loads, which is
of transfer function (20).
is the reference voltage and
is the voltage generated by the inverter. The output signal of LADRC controller is denoted as
(
d-axis has the same form as the
q-axis), which is
of transfer function (20).
is the LC filter transfer function,
is the relationship between
and
.
and
are given by transfer function (21) and (22) respectively.
Due to the no load conditions, the
in the model (1) is equal to zero, then the transfer function between
and
can be written as:
In this paper, according to the state space averaging method, the switching function of the IGBT is linearized, and the pulse width modulation method is adopted. The relationship between the modulation signals
and the inverter generated voltage
can be regarded as an one-order inertia unit:
where
is the amplitude of the triangle wave,
is the DC voltage. By combining (21)–(24), the transfer function of the fundamental voltage control loop can be expressed as:
where
Letting
2.5 mH,
4.7
F,
,
,
,
,
,
,
,
,
,
30 V,
12.5 V,
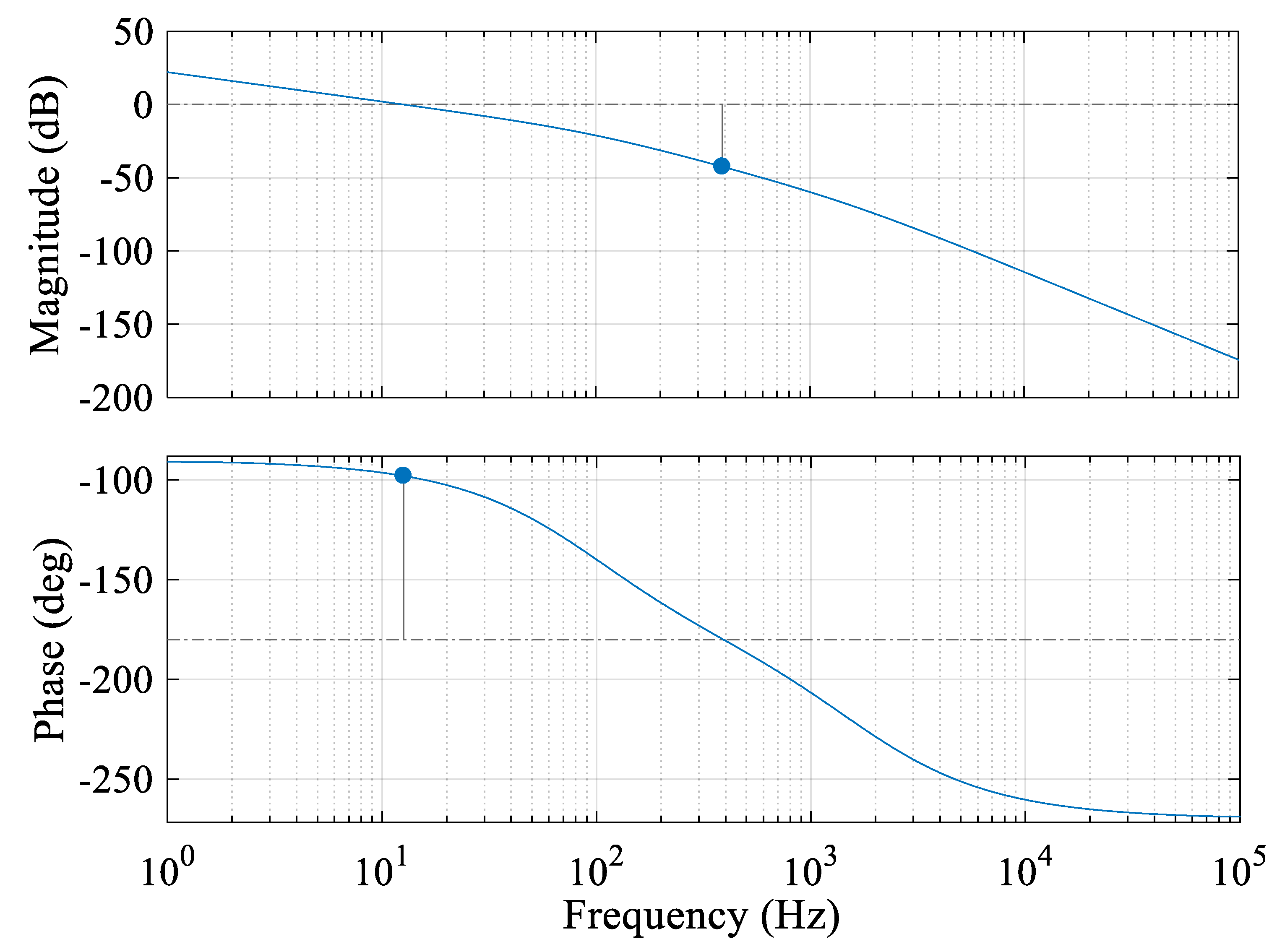
0.0001 s. The frequency response of
can be obtained, as shown in
Figure 5.
As can be seen from the Bode plot, the phase margin of is 82 deg at 12.6 Hz and the amplitude margin is 42.4 dB at 390 Hz. Moreover, systems with phase margins greater than 45 deg in engineering experience have good dynamic performance. Therefore, the stability and dynamics of the fundamental voltage control loop are excellent.
The proposed strategy adds a virtual harmonic impedance branch to the fundamental voltage control loop, similar to the feedforward-feedback composite control method. Therefore, based on the stability analysis of the feedback loop, the frequency response of the feedforward loops needs to be analyzed.
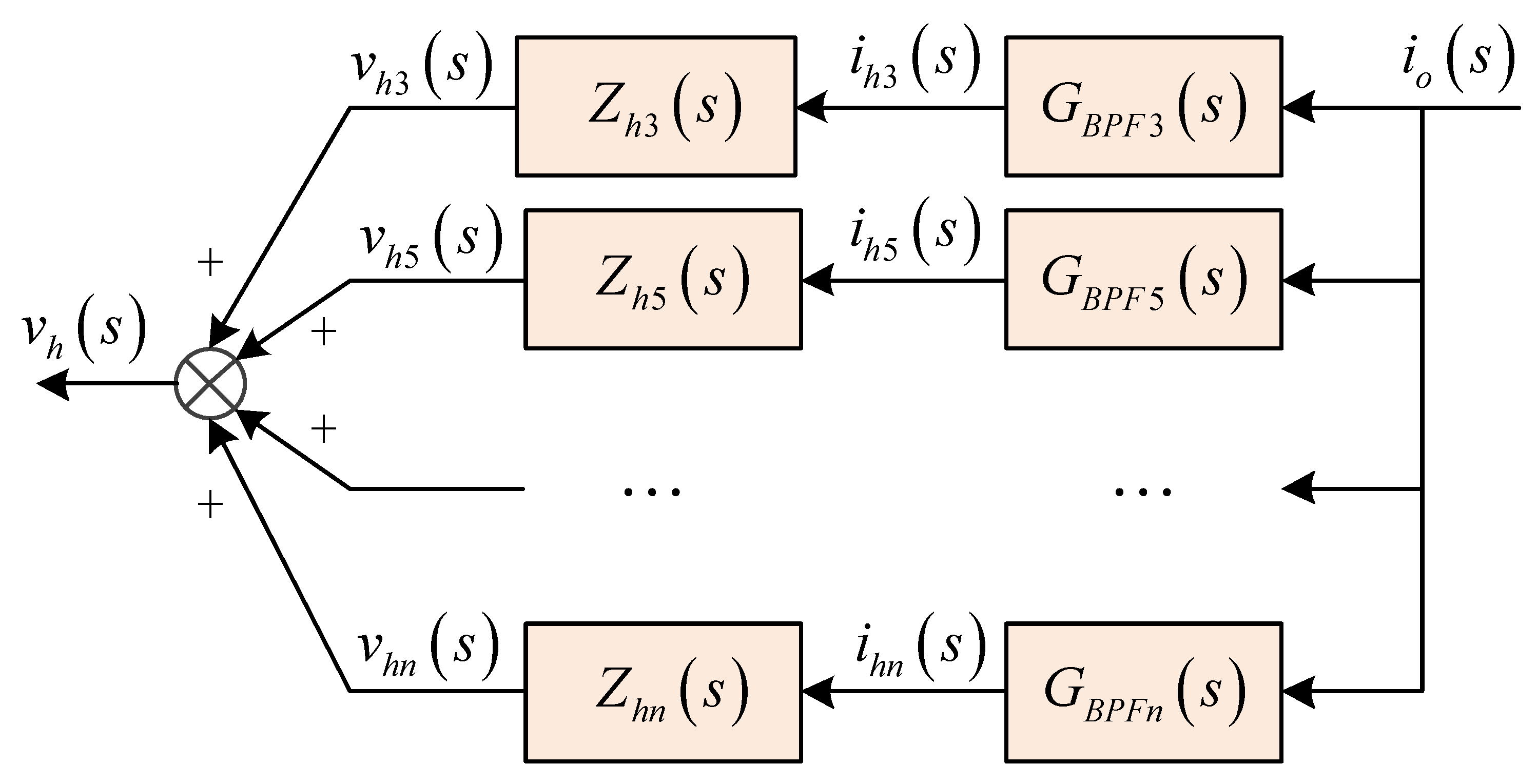
The block diagram of the transfer function of multiple virtual harmonic impedances in parallel is shown in
Figure 6, where
is the total harmonic voltage drop shaped by harmonic currents and virtual harmonic impedances,
is the
nth virtual harmonic impedance.
The premise of harmonic compensation using virtual harmonic impedance is the extraction of harmonic components in the current signal. To simplify the analysis, the extraction process is approximated as a bandpass filter
designed at the harmonic frequencies
that need to be compensated:
where
is the center frequency of the extracted harmonic components,
k is the gain of center frequency,
Q is the quality factor. The transfer function of the virtual harmonic impedance is
, which can characterize the relationship between
and
. By combing (9) and (28), the transfer function of this loop can be obtained:
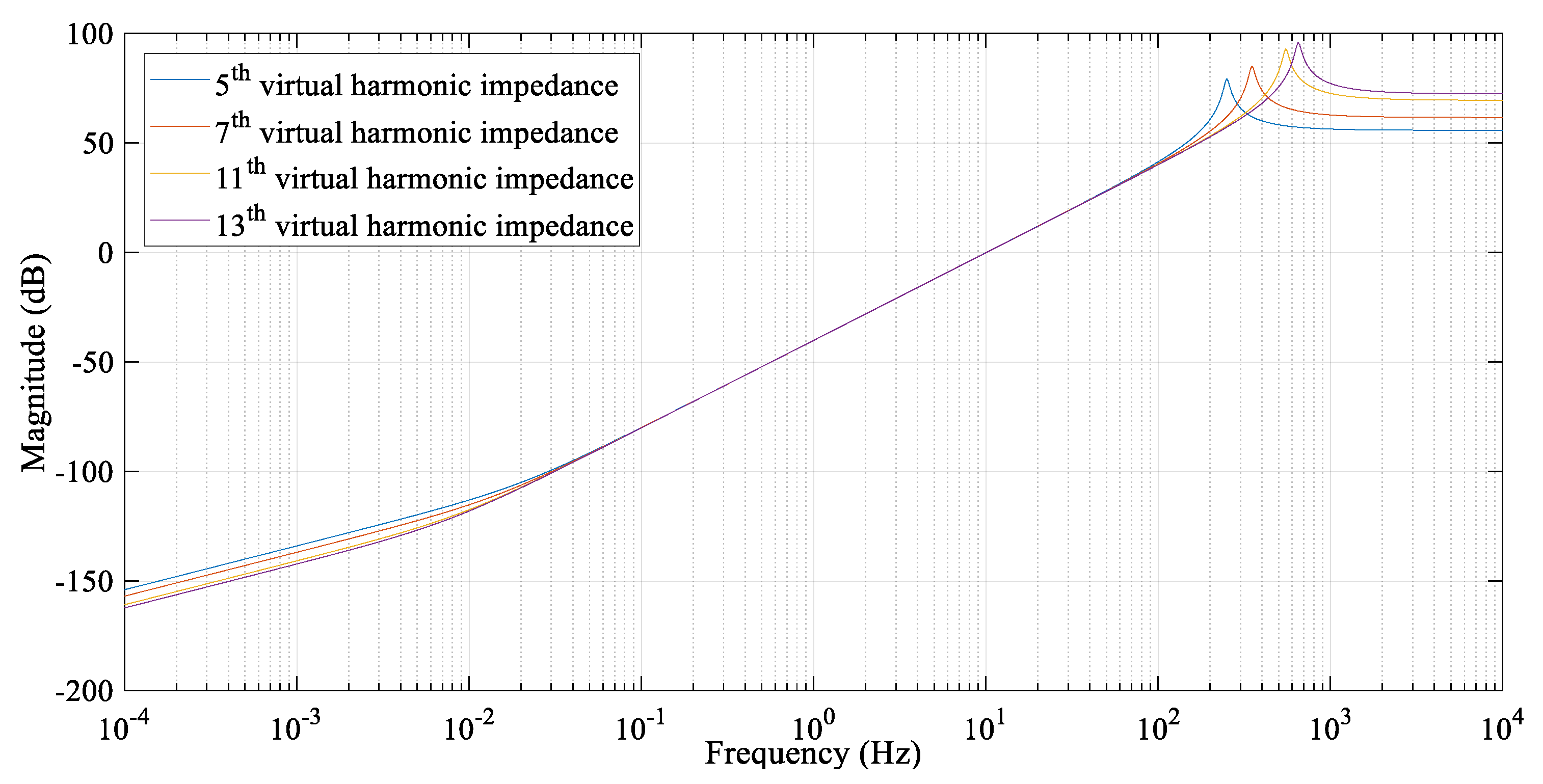
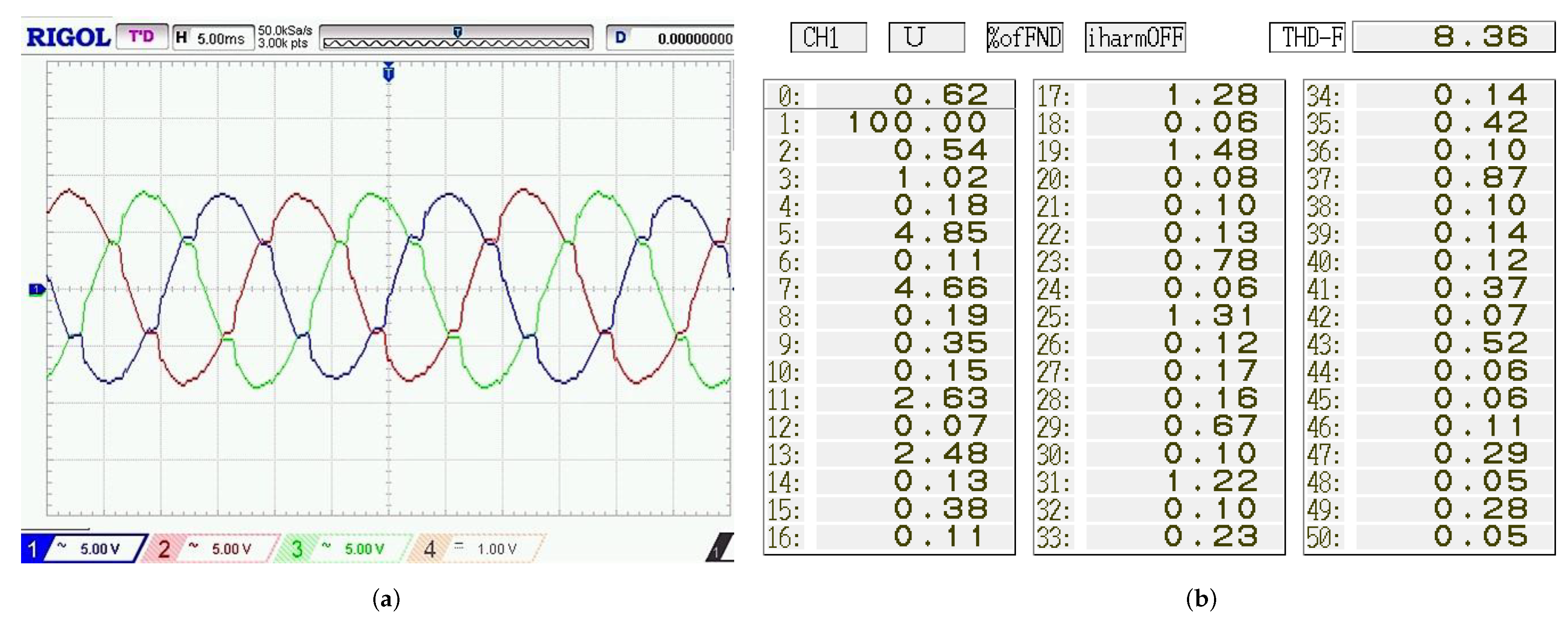
Due to the times harmonics are the main components of harmonic current under the nonlinear loads, and the harmonic content is attenuated with the increase of harmonic frequency, this paper selects the 5th, 7th, 11th and 13th harmonics for compensation.
Letting
,
,
,
H,
H,
H,
H. The frequency response of each individual virtual harmonic impedance is shown in
Figure 7. It can be seen that the designed virtual harmonic impedance (including the extraction units) has a high positive gain at 250 Hz, 350 Hz, 550 Hz, and 650 Hz, respectively.
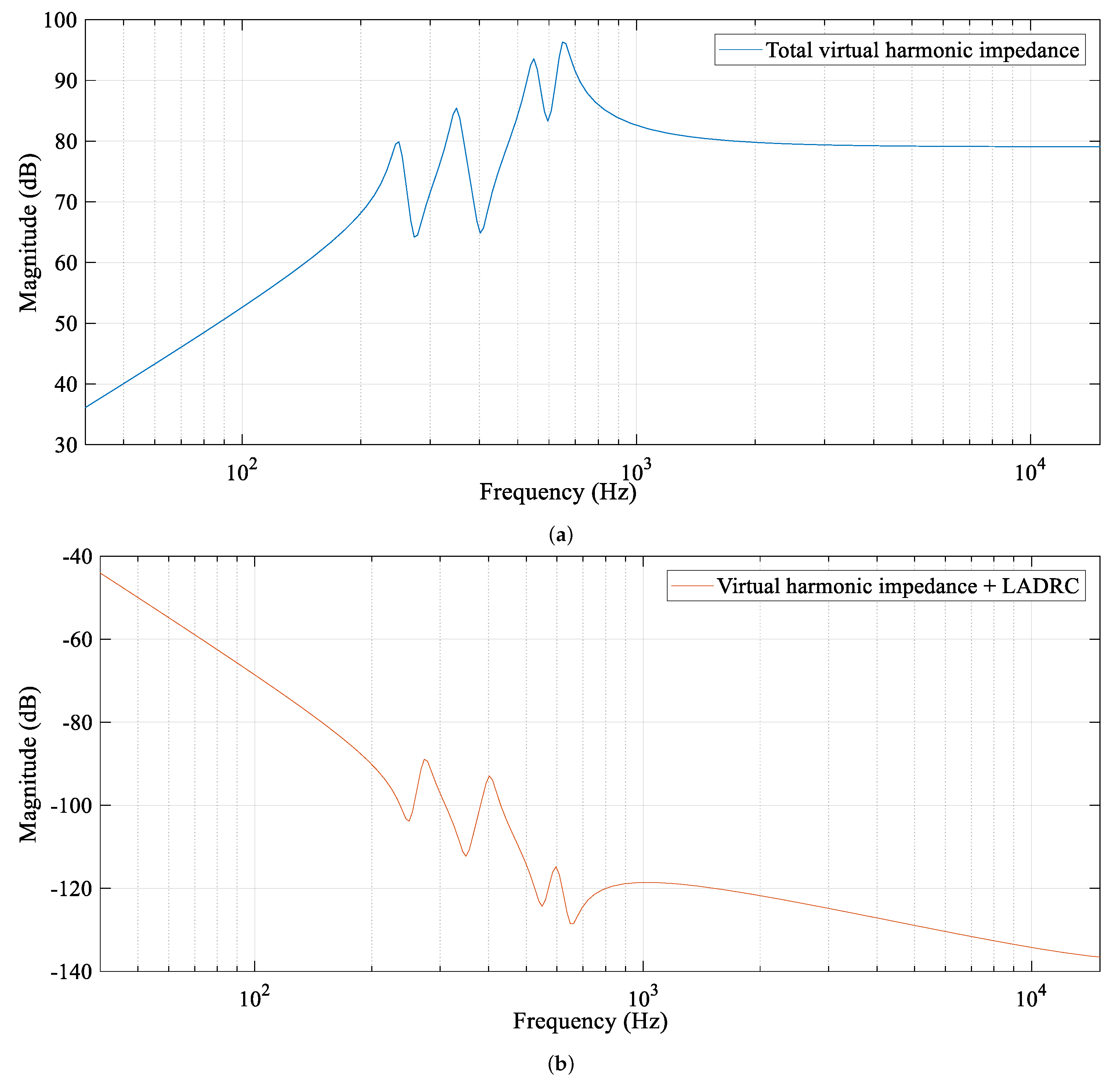
Frequency responses of (29)
and proposed method are shown in
Figure 8. It can be seen from
Figure 8b that the whole system exhibits a larger negative gain at the selected frequency, which reduces the equivalent output impedance of the system, so the harmonic voltage drop generated by the harmonic current is reduced. This conclusion proves the validity of the feedforward loop.
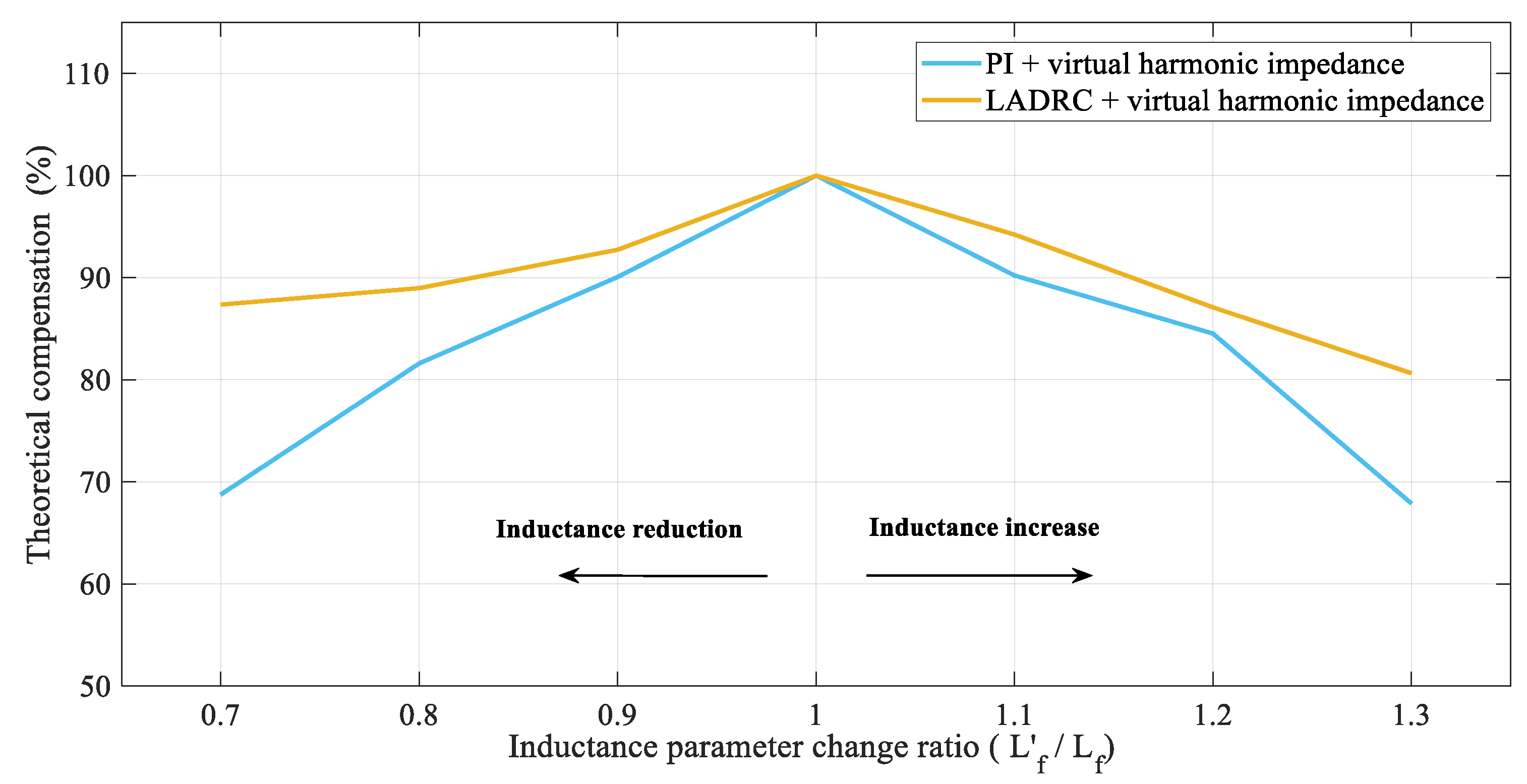
Furthermore, as virtual harmonic impedance effectiveness depends on the real inductance value
, in this section a sensitivity analysis regarding to variations of the output LC filter parameters is shown in
Figure 9. It can be seen that compared with PI, the use of LADRC makes the output inductance fluctuation have less influence on the harmonic compensation effect. Authors in [
21] indicates that the value of parasitic resistance has a weak influence on the virtual harmonic impedance, so the influence of parasitic resistance in this paper is not studied.
6. Discussion
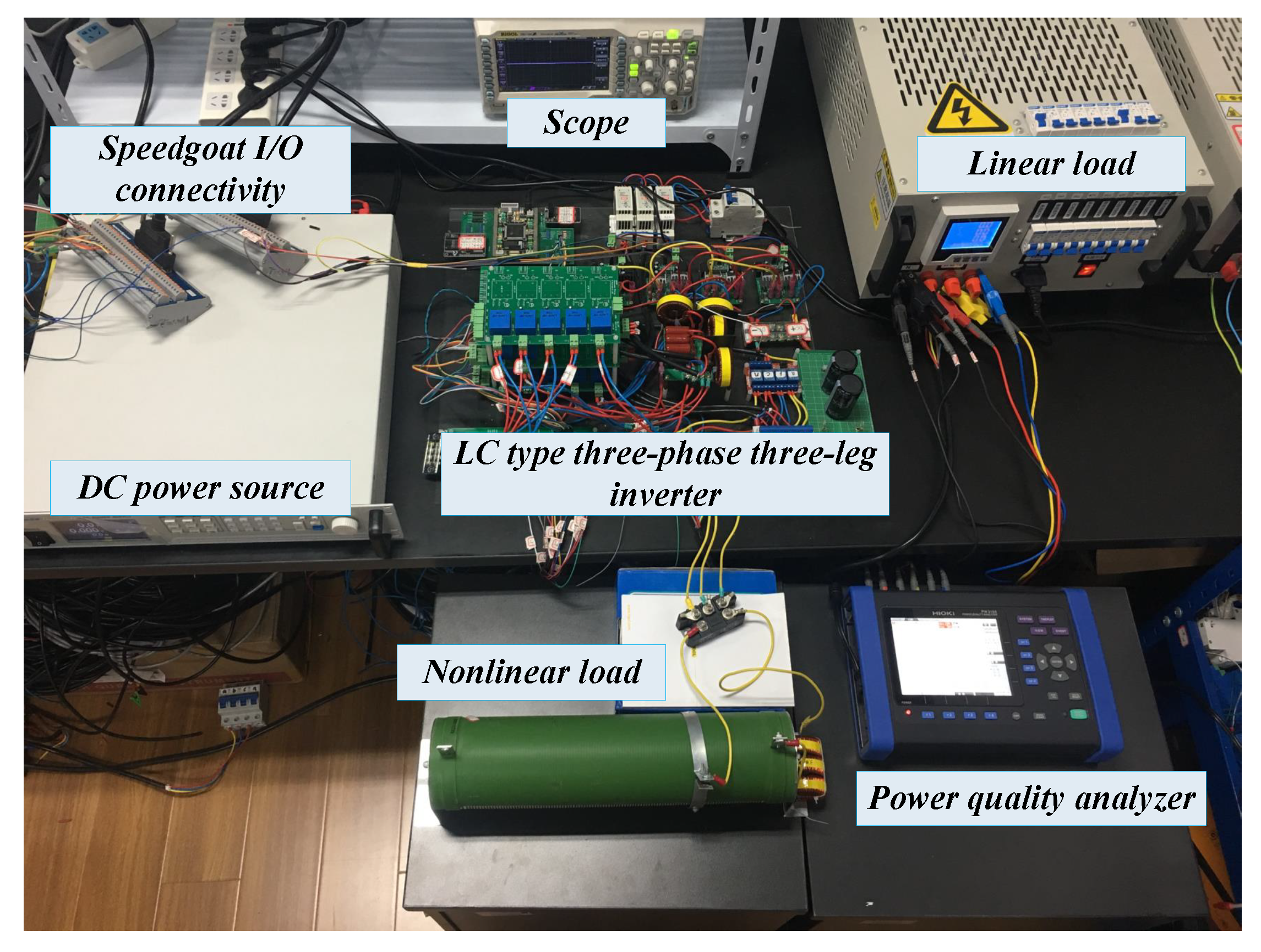
This paper proposes a harmonic compensation strategy based on LADRC and virtual harmonic impedance for LC type three-phase three-leg inverter.
Firstly, the proposed strategy considers the fluctuation of the filter inductance as the unmodelled dynamics of the system and reduces the sensitivity of the virtual harmonic impedance to the filter inductance through the observation and compensation of LADRC, which is shown in
Figure 9. Therefore, when the filter inductance fluctuates in actual engineering, the proposed control strategy has better harmonic compensation effect. In
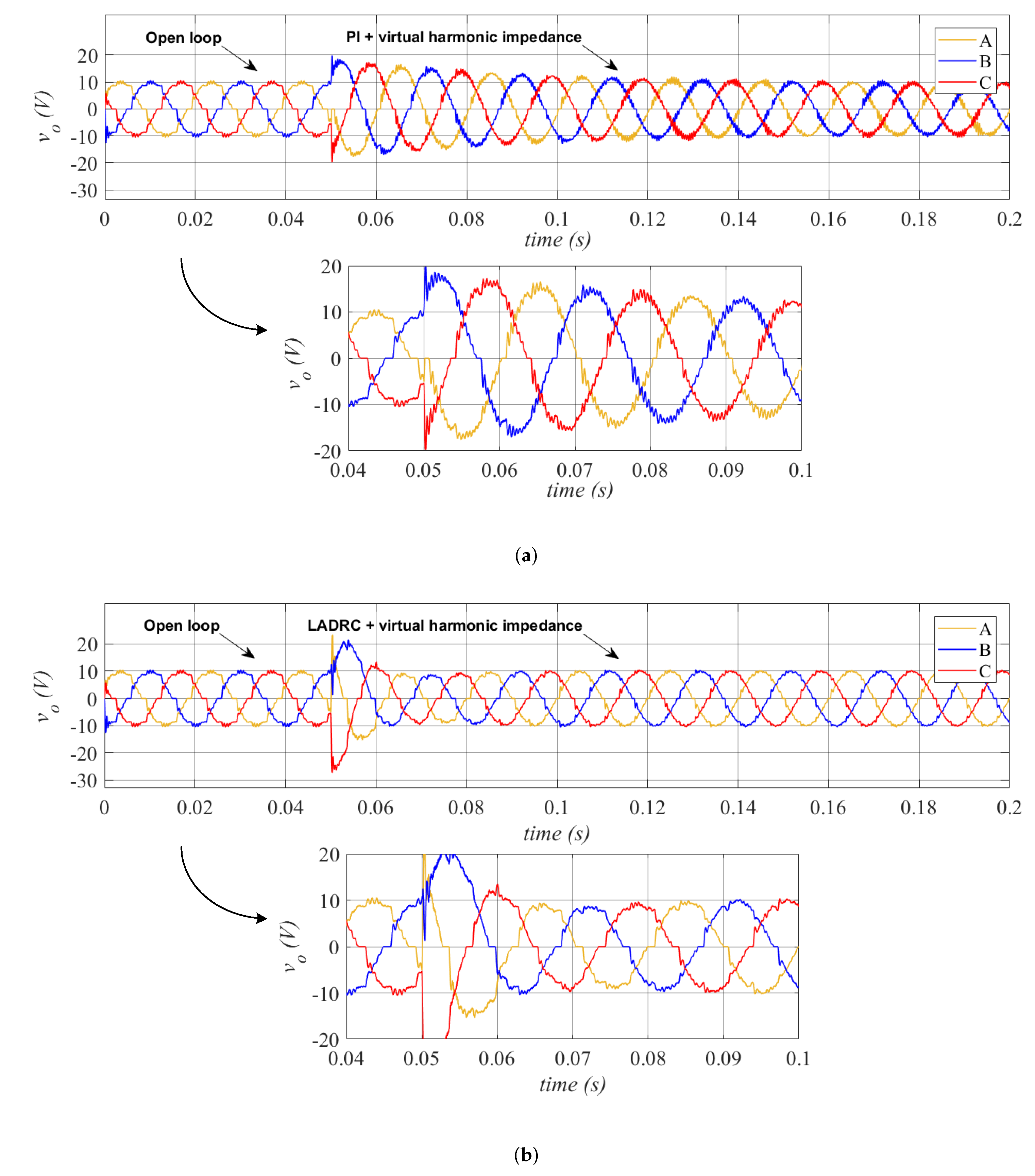
Section 5.2 demonstrates this advantage through physical experiments.
Secondly, the proposed method does not require additional compensation devices, which reduces power loss and cost, and has higher economic and application value. As the harmonic compensation loops increases, the computational complexity of the method will increase, but this method is a flexible and effective strategy for specific compensation of harmonic components with higher content in the output voltage.
Finally, the proposed strategy can decouple the system model and eliminate the interaction between the d-axis and the q-axis to improve the transient recovery speed. Decoupling the model reduces the number of sensors in physical experiments, from 9 sensors (with PI controllers) to 6 sensors (with LADRC controllers).
In summary, the proposed method has better control performance and engineering applicability, which is verified by simulations and experiments. However, as the number of harmonics that need to be compensated increases, the amount of calculation also increases. In the next studies, a harmonic full compensation strategy with less computational complexity can be studied.
References















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}