A Coordinated DC Power Support Strategy for Multi-Infeed HVDC Systems

Abstract
:1. Introduction
- (1)
- Steady-state operating points of SCs are adjusted through the leading phase operation to increase the control margin during the process of DC power support.
- (2)
- Multiple HVDC links are ranked and selected to participate in the DC power support strategy, for which the feasible range of DC power support values are guaranteed by properly adjusting excitation voltage reference values of SCs.
- (3)
- A comprehensive stability index is proposed to quantify the impacts of the DC power support on the sending-end and receiving-end systems, which accounts simultaneously for the transient stability and frequency security issues.
2. Main Operating Principles of the Proposed DC Power Support Strategy
3. Adjustment of Operating Points for SCs
3.1. Optimal Leading Phase Operation for SCs
- The objective function in Equation (6) is to minimize differences in the variations of DC power support values among all HVDC links. The variation of DC power support value for the kth HVDC link can be expressed as Δ/Δ × Δ when reactive power value absorbed by SCs installed close to the inverter station is Δ by using the linear relationship between Δ and Δ. The difference in the variations of DC power support values between the kth and mth HVDC links is Δ/Δ × Δ − Δ/Δ × Δ.
- Inequations in Equation (6) ensure that voltage values (and their variations) of buses and reactive power absorbed by SCs in both sending-end and receiving-end systems are within the limits.
- The equation of ΔQr = wΔQi relates variations of reactive power absorbed by SCs in sending-end and receiving-end systems. The kth element of w is set to be equal to the ratio of Δ and Δ corresponding to the minimum .
- Other equations describe the linear relationships between voltage variations of buses and variations of reactive power absorbed by SCs in sending-end and receiving-end systems, where the sensitivity matrixes Sr and Si are presented in Appendix A.1.
- Detailed symbol explanations in Equation (6) are presented in Appendix A.2.
3.2. Adjustment of Excitation Voltage Reference Values for SCs
4. Coordination of HVDC Links Participating in DC Power Support
4.1. Selection of HVDC Links Participating in DC Power Support
- Select priority HVDC links that have smaller electrical distance to fault AC tie-lines or HVDC links.
- Select priority HVDC links that have stronger support from AC systems.
4.2. Optimal DC Power Support Values for Participating HVDC Links
4.2.1. Transient Stability of Sending-End Systems
4.2.2. Frequency Security of Receiving-End Systems
4.2.3. Comprehensive Stability Margin Index
4.3. Optimal Load Shedding Model
- The objective function is to minimize the sum of load shedding values assigned into the load shedding areas.
- The first constraint describes the value of the frequency security margin ηf reaching the requirement through load shedding, in which ηf0 is the initial value of ηf, A and PLS are the NLS-dimensional vectors of frequency-load sensitivity and load shedding values, and ε is the requirement for the frequency security margin.
- The second constraint set the limits for the load shedding values, in which 0 and PLSmax set the lower and upper limits, respectively.
5. Detailed Steps of DC Power Support Strategy
- Solve the OLPO model and obtain the reactive power values ΔQr and ΔQi absorbed by SCs installed close to the rectifier and inverter stations of all HVDC links.
- Select the HVDC links participating in DC power support by ranking the non-fault HVDC links according to the DC power support factors Kr and Ki in the sending-end and receiving-end systems.
- Determine the search space of DC power support values for the HVDC links participating in DC power support where the AVREF model is used to coordinately adjust Vref for SCs installed close to the rectifier and inverter stations and ensure DC power to achieve the target values.
- Obtain the optimal DC power support values corresponding to the largest value of comprehensive stability margin index η.
- Solve the OLS model and obtain the minimum sum of load shedding values PL_sum with the value of the frequency security margin index ηf reaching the requirement for the margin ε if the initial value of ηf is smaller than ε.
6. Case Studies
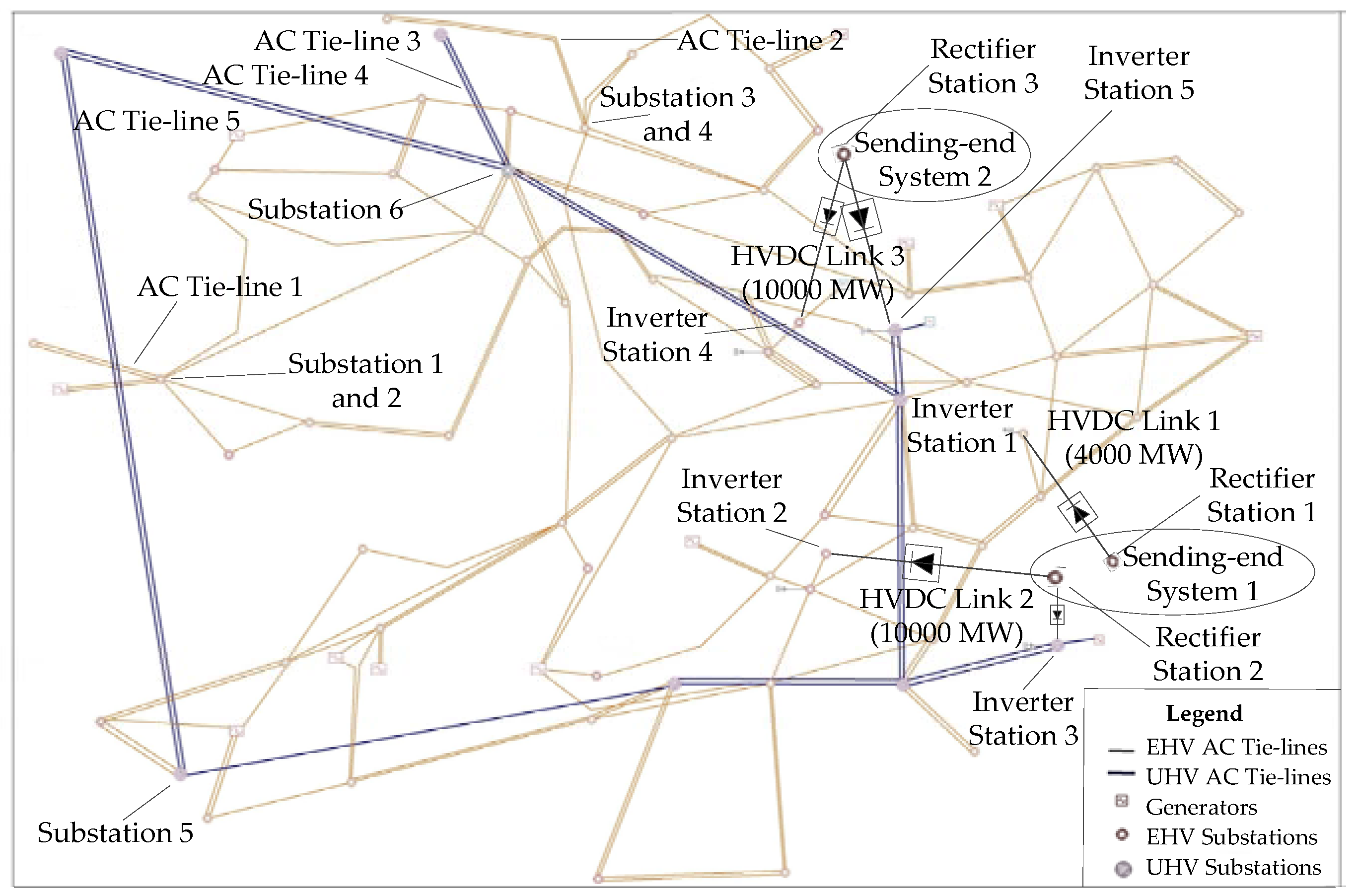
6.1. Test Power System
6.2. Effectiveness of OLPO for SCs
6.2.1. OLPO for SCs at Converter Station of Single HVDC Link
6.2.2. OLPO for SCs at Converter Stations of Three HVDC Links
6.3. Selection of HVDC Links Participating in DC Power Support
6.4. Optimization of DC Power Support Values
6.4.1. Search Space of DC Power Support Values
6.4.2. Optimal Combination of DC Power Support Values
6.4.3. Optimal Load Shedding
- There are 17 load shedding areas in the receiving-end system and the upper limit of the shedding value in each area is set to be 15% of the load level in the area.
- ε is set to be 1 × 10−3.
- Load shedding is actuated at 0.2 s after HVDC Link 2 or 3 is bipolar blocking.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Formulation of Sensitivity Matrix
Appendix A.2. Symbol Explanations of the OLPO Model
- Δ and Δ (elements of vectors ΔQr and ΔQi) are reactive power values absorbed by SCs installed close to rectifier and inverter stations of the kth HVDC link, respectively; ΔQrmin, ΔQimin, ΔQrmax and ΔQimax are limits of ΔQr and ΔQi; and Qrmax and Qimax are the maximum sum values of reactive power absorbed by SCs installed close to rectifier and inverter stations.
- Δ and Δ (elements of vectors ΔVr and ΔVi) are voltage variations of buses at rectifier and inverter stations of the kth HVDC link, respectively; ΔVrmin and ΔVimin are lower limits of ΔVr and ΔVi; and Vrmin and Vimin are the lower limits of voltage Vr in sending-end systems and voltage Vi in receiving-end systems.
- ΔVr_rest and ΔVi_rest are voltage variations of buses in sending-end and receiving-end systems except for buses at rectifier and inverter stations; Sr and Si are sensitivity matrixes in sending-end and receiving-end systems, respectively; and ΔQr_rest and ΔQi_rest are reactive power variations of buses in sending-end and receiving-end systems except for AC buses at rectifier and inverter stations, which are set to be 0.
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault HVDC Link | Kr for Non-Fault HVDC Links | ||
|---|---|---|---|
| HVDC Link 1 | HVDC Link 2 | HVDC Link 3 | |
| HVDC Link 1 | N/A | 0.3273 | 0 |
| HVDC Link 2 | 0.2199 | N/A | 0 |
| HVDC Link 3 | 0 | 0 | N/A |
| Inverter Stations/Substations of Fault HVDC Links/AC Tie-Lines | Inverter Stations of Non-fault HVDC Links | |||||
|---|---|---|---|---|---|---|
| Inverter Station 1 | Inverter Station 2 | Inverter Station 3 | Inverter Station 4 | Inverter Station 5 | ||
| Ki | Inverter Station 1 | N/A | 0.5024 | 0.5461 | 0.4336 | 0.4668 |
| Inverter Station 2 | 0.4207 | N/A | N/A | 0.3267 | 0.4780 | |
| Inverter Station 3 | 0.4035 | N/A | N/A | 0.3550 | 0.7097 | |
| Inverter Station 4 | 0.4288 | 0.2894 | 0.3567 | N/A | N/A | |
| Inverter Station 5 | 0.4080 | 0.3750 | 0.6301 | N/A | N/A | |
| Substation 1 | 0.1214 | 0.0796 | 0.1142 | 0.1027 | 0.0913 | |
| Substation 2 | 0.1214 | 0.0796 | 0.1142 | 0.1027 | 0.0913 | |
| Substation 3 | 0.1600 | 0.1017 | 0.1374 | 0.1136 | 0.1094 | |
| Substation 4 | 0.1600 | 0.1017 | 0.1374 | 0.1131 | 0.1094 | |
| Substation 5 | 0.2251 | 0.1852 | 0.3047 | 0.1229 | 0.2077 | |
| Substation 6 | 0.2050 | 0.1502 | 0.2390 | 0.1235 | 0.1961 | |
| Combinations of DC Power Support Values for [DC1, DC3] When HVDC Link 2 Is Bipolar Blocking/% | Combinations of DC Power Support Values for [DC1, DC3] When HVDC Link 3 Is Bipolar Blocking/% | |||||||
|---|---|---|---|---|---|---|---|---|
| [0, 0] | [0, 10] | [0, 20] | [0, 30] | [0, 0] | [0, 10] | [0, 20] | [0, 30] | [0, 40] |
| [10, 10] | [10, 10] | [10, 20] | [10, 30] | [10, 10] | [10, 10] | [10, 20] | [10, 30] | [10, 40] |
| [20, 10] | [20, 10] | [20, 20] | [20, 30] | [20, 10] | [20, 10] | [20, 20] | [20, 30] | [20, 40] |
| [30, 10] | [30, 10] | [30, 20] | [30, 30] | [30, 10] | [30, 10] | [30, 20] | [30, 30] | [30, 40] |
| [40, 10] | [40, 10] | [40, 20] | [40, 30] | [40, 10] | [40, 10] | [40, 20] | [40, 30] | [40, 40] |
| [50, 10] | [50, 10] | [50, 20] | [50, 30] | [50, 10] | [50, 10] | [50, 20] | [50, 30] | [50, 40] |
References
- Hwang, S.; Lee, J.; Jang, G. HVDC-system-interaction assessment through line-flow change-distribution factor and transient-stability analysis at planning stage. Energies 2016, 9, 1068. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, Y.; Li, G.; Udaya, D. Design of LCC HVDC wide-area emergency power support control based on adaptive dynamic surface control. IET Gener. Transm. Distrib. 2017, 11, 3236–3245. [Google Scholar] [CrossRef]
- Harnefors, L.; Johansson, N.; Zhang, L.; Berggren, B. Interarea oscillation damping using active-power modulation of multiterminal HVDC transmissions. IEEE Trans. Power Syst. 2014, 29, 2529–2538. [Google Scholar] [CrossRef]
- Rahman, H.; Khan, B.H. Stability improvement of power system by simultaneous AC–DC power transmission. Electr. Power Syst. Res. 2008, 78, 756–764. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Su, M.; Wang, H.; Dan, H.; Xiong, W. Indirect matrix converter-based topology and modulation schemes for enhancing input reactive power capability. IEEE Trans. Power Electron. 2015, 30, 4669–4681. [Google Scholar] [CrossRef]
- Wang, K.; Yang, S.; Yao, J. Multi-circuit HVDC system emergency DC power support with reactive control. In Proceedings of the 2011 IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011; pp. 1–5. [Google Scholar]
- Teleke, S.; Abdulahovic, T.; Thiringer, T.; Svensson, J. Dynamic performance comparison of synchronous condenser and SVC. IEEE Trans. Power Deliv. 2008, 23, 1606–1612. [Google Scholar] [CrossRef]
- Kirby, N.M.; Marken, P.E.; Paradis, M.; Wang, P.; Plowright, I.; Moon, H.; Ingemansson, D.; Mendis, R.; Mehraban, B. Extending their lifetimes: Keeping HVDC and FACTS installations in service longer. IEEE Power Energy Mag. 2016, 14, 57–65. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Interconnection of two very weak AC systems by VSC-HVDC links using power-synchronization control. IEEE Trans. Power Syst. 2011, 26, 344–355. [Google Scholar] [CrossRef]
- Wang, C.; Wang, H.; Xu, G. System voltage regulation of power grid based on synchronous generator’s leading phase operation. In Proceedings of the 2010 China International Conference on Electricity Distribution, Nanjing, China, 12–16 September 2010; pp. 1–4. [Google Scholar]
- Wang, L.; Li, W.; Huo, F.; Zhang, S.; Guan, C. Influence of underexcitation operation on electromagnetic loss in the end metal parts and stator step packets of a turbogenerator. IEEE Trans. Energy Convers. 2014, 29, 748–757. [Google Scholar] [CrossRef]
- Cui, T.; Lin, W.; Sun, Y.; Xu, J.; Zhang, H. Excitation voltage control for emergency frequency regulation of island power systems with voltage-dependent loads. IEEE Trans. Power Syst. 2016, 31, 1204–1217. [Google Scholar] [CrossRef]
- Masood, N.A.; Yan, R.; Saha, T.K.; Bartlett, S. Post-retirement utilisation of synchronous generators to enhance security performances in a wind dominated power system. IET Gener. Transm. Distrib. 2016, 10, 3314–3321. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Xu, Z.; Weng, H.; Xu, F. Emergency power support for multiple DCs based on trajectory sensitivity. Electr. Power Automat. Equip. 2014, 34, 86–91. [Google Scholar]
- Rafael, Z.; Thierry, V.; Federico, M.; Antonio, J. Securing transient stability using time-domain simulations within an optimal power flow. IEEE Trans. Power Syst. 2010, 25, 243–253. [Google Scholar]
- Vu, T.L.; Turitsyn, K. Lyapunov functions family approach to transient stability assessment. IEEE Trans. Power Syst. 2016, 31, 1269–1277. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.; Zhang, R.; Xue, Y.; David, J. A decomposition-based practical approach to transient stability-constrained unit commitment. IEEE Trans. Power Syst. 2015, 30, 1455–1464. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Liu, C.R.; Li, G.Y.; Liu, Y.; Liu, Y.L. Impact study of PMSG-based wind power penetration on power system transient stability using EEAC theory. Energies 2015, 8, 13419–13441. [Google Scholar] [CrossRef]
- Zhang, H.; Li, C.; Liu, Y. Quantitative frequency security assessment method considering cumulative effect and its applications in frequency control. Int. J. Electr. Power Energy Syst. 2015, 65, 12–20. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, H.; Li, C.; Liu, Y.; Li, W.; Terzija, V. Optimization of the event-driven emergency load-shedding considering transient security and stability constraints. IEEE Trans. Power Syst. 2017, 32, 2581–2592. [Google Scholar] [CrossRef]
- Lin, Q.; Li, X.Y.; Wang, X. Multi-DC emergency power support strategy based on DC comprehensive support factors. East China Electr. Power 2013, 41, 1431–1435. [Google Scholar]
- Zhao, R.; Zhang, Y.; Li, X.; Chen, H.; He, Y. The research on the emergency DC power support strategies of Deyang-Baoji HVDC project. In Proceedings of the 2011 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 25–28 March 2011; pp. 1–4. [Google Scholar]
- Liu, X.; Xie, H.; Wang, H.; Wang, H.; Wang, Z.; Lv, J. Emergency DC power support in parallel AC/DC power system. In Proceedings of the 2013 International Conference on Mechatronics and Automatic Control Systems, Hangzhou, China, 10–11 August 2013; pp. 525–532. [Google Scholar]
- Daryabak, M.; Filizadeh, S.; Jatskevich, J.; Davoudi, A.; Saeedifard, M.; Sood, V.K.; Martinez, J.A.; Aliprantis, D.; Cano, J.; Mehrizi-Sani, A. Modeling of LCC-HVDC systems using dynamic phasors. IEEE Trans. Power Deliv. 2014, 29, 1989–1998. [Google Scholar] [CrossRef]
- Li, Y.; Luo, L.; Rehtanz, C.; Sven, R.; Liu, F. Realization of reactive power compensation near the LCC-HVDC converter bridges by means of an inductive filtering method. IEEE Trans. Power Deliv. 2012, 27, 3908–3923. [Google Scholar] [CrossRef]
- Aik, D.L.H.; Andersson, G. Analysis of voltage and power interactions in multi-infeed HVDC systems. IEEE Trans. Power Deliv. 2013, 28, 816–824. [Google Scholar] [CrossRef]
- Liao, S.; Yao, W.; Ai, X.; Wen, J.; Liu, Q.; Jiang, Y.; Zhang, J.; Tu, J. An improved multi-infeed effective short-circuit ratio for AC/DC power systems with massive shunt capacitors installed. Energies 2017, 10, 396. [Google Scholar] [CrossRef]
- Saunders, C.S.; Alamuti, M.M.; Taylor, G.A. Transient stability analysis using potential energy indices for determining critical generator sets. In Proceedings of the 2014 IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef] [Green Version]
- Luo, C.; Yang, J.; Sun, Y.Z. Risk assessment of power system considering frequency dynamics and cascading process. Energies 2018, 11, 422. [Google Scholar] [CrossRef]
- Yang, K.; Peng, S.; Dong, S.; Bin, L. Research on stability control strategy for island system of HVDC. In Proceedings of the 3rd International Conference on Mechanical Engineering and Intelligent Systems, Windsor, UK, 29–30 September 2016; pp. 694–699. [Google Scholar]
- Zhang, Y.; Huang, S.; Schmall, J.; Conto, J.; Billo, J.; Rehman, E. Evaluating system strength for large-scale wind plant integration. In Proceedings of the 2014 IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]






| [Δ, Δ]/p.u. | Δ/p.u. | [Δ, Δ]/p.u. | Δ/p.u. | ||
|---|---|---|---|---|---|
| [3.0, 1.5] | −1.8 × 10−2 | 4 × 10−3 | [3.0, 2.4] | −2.66 × 10−2 | 4.9 × 10−3 |
| [3.0, 1.8] | −2.08 × 10−2 | 4.3 × 10−3 | [3.0, 2.7] | −2.96 × 10−2 | 5.2 × 10−3 |
| [3.0, 2.1] | −2.37 × 10−2 | 4.7 × 10−3 | [3.0, 3.0] | −3.26 × 10−2 | 5.4 × 10−3 |
| Scenario 1: HVDC Link 2 Is Bipolar Blocking | |||||||
| Combinations [DC1, DC3] (%) | ηt | ηf | η | Combinations [DC1, DC3] (%) | ηt | ηf | η |
| [50, 20] | 1 | 0.14 | 0.57 | [30, 30] | 0.14 | 0.50 | 0.32 |
| [50, 30] | 0.85 | 1 | 0.93 | [20, 30] | 0.00 | 0 | 0.00 |
| [40, 30] | 0.65 | 0.90 | 0.78 | ||||
| Scenario 2: HVDC Link 3 Is Bipolar Blocking | |||||||
| Combinations [DC1, DC2] (%) | ηt | ηf | η | Combinations [DC1, DC2] (%) | ηt | ηf | η |
| [50, 20] | 0.87 | 0.47 | 0.67 | [0, 40] | 0.85 | 0 | 0.43 |
| [10, 30] | 1.00 | 0.44 | 0.72 | [10, 40] | 0.62 | 0.51 | 0.57 |
| [20, 30] | 0.87 | 0.46 | 0.67 | [20, 40] | 0.54 | 0.55 | 0.55 |
| [30, 30] | 0.56 | 0.49 | 0.53 | [30, 40] | 0.36 | 0.63 | 0.50 |
| [40, 30] | 0.28 | 0.51 | 0.40 | [40, 40] | 0.05 | 0.78 | 0.42 |
| [50, 30] | 0.18 | 0.56 | 0.37 | [50, 40] | 0.00 | 1 | 0.50 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Chu, X.; Zhang, B.; Ma, L.; Li, X.; Wang, X.; Wang, L.; Wu, C. A Coordinated DC Power Support Strategy for Multi-Infeed HVDC Systems. Energies 2018, 11, 1637. https://doi.org/10.3390/en11071637
Zhang C, Chu X, Zhang B, Ma L, Li X, Wang X, Wang L, Wu C. A Coordinated DC Power Support Strategy for Multi-Infeed HVDC Systems. Energies. 2018; 11(7):1637. https://doi.org/10.3390/en11071637
Chicago/Turabian StyleZhang, Chunlei, Xiaodong Chu, Bing Zhang, Linlin Ma, Xin Li, Xiaobo Wang, Liang Wang, and Cheng Wu. 2018. "A Coordinated DC Power Support Strategy for Multi-Infeed HVDC Systems" Energies 11, no. 7: 1637. https://doi.org/10.3390/en11071637