Using SoC Online Correction Method Based on Parameter Identification to Optimize the Operation Range of NI-MH Battery for Electric Boat


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Introduction and Problem of Battery Life
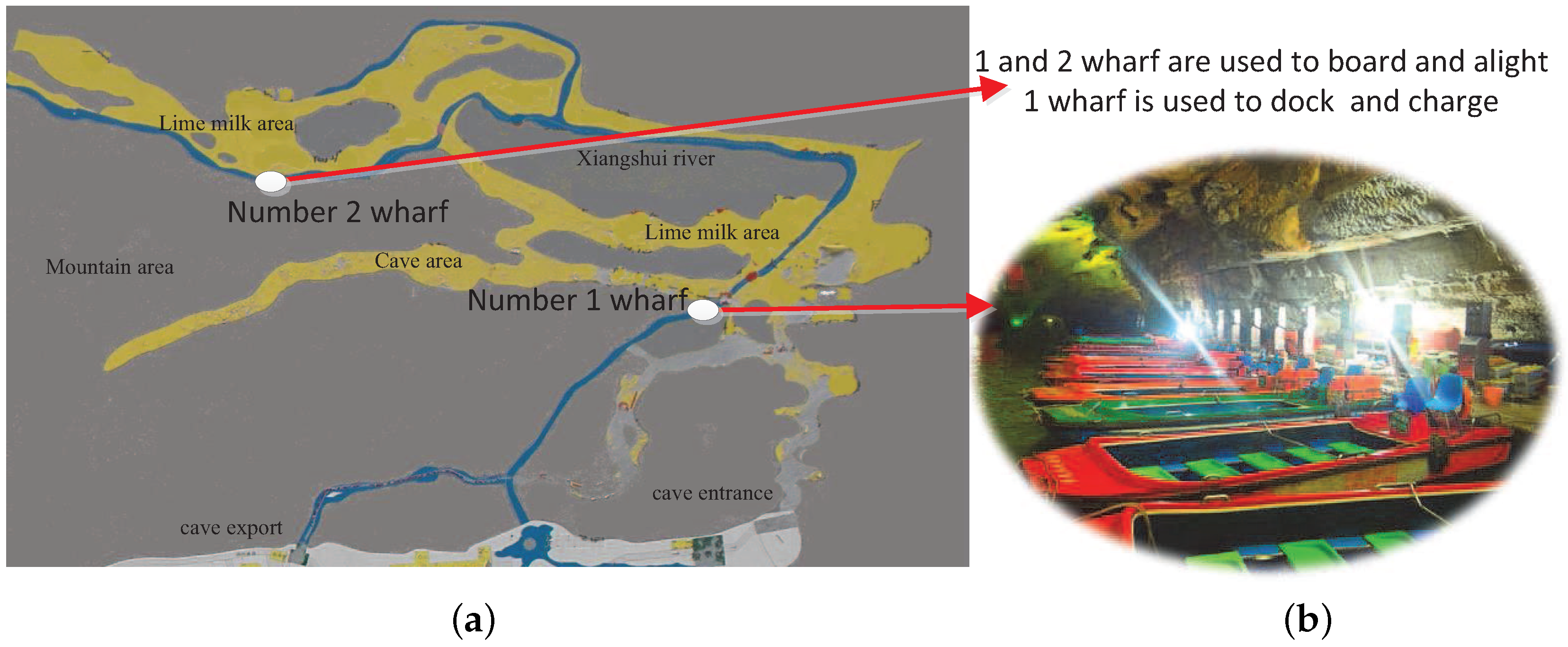
2.1. Running Environment of Electric Boat
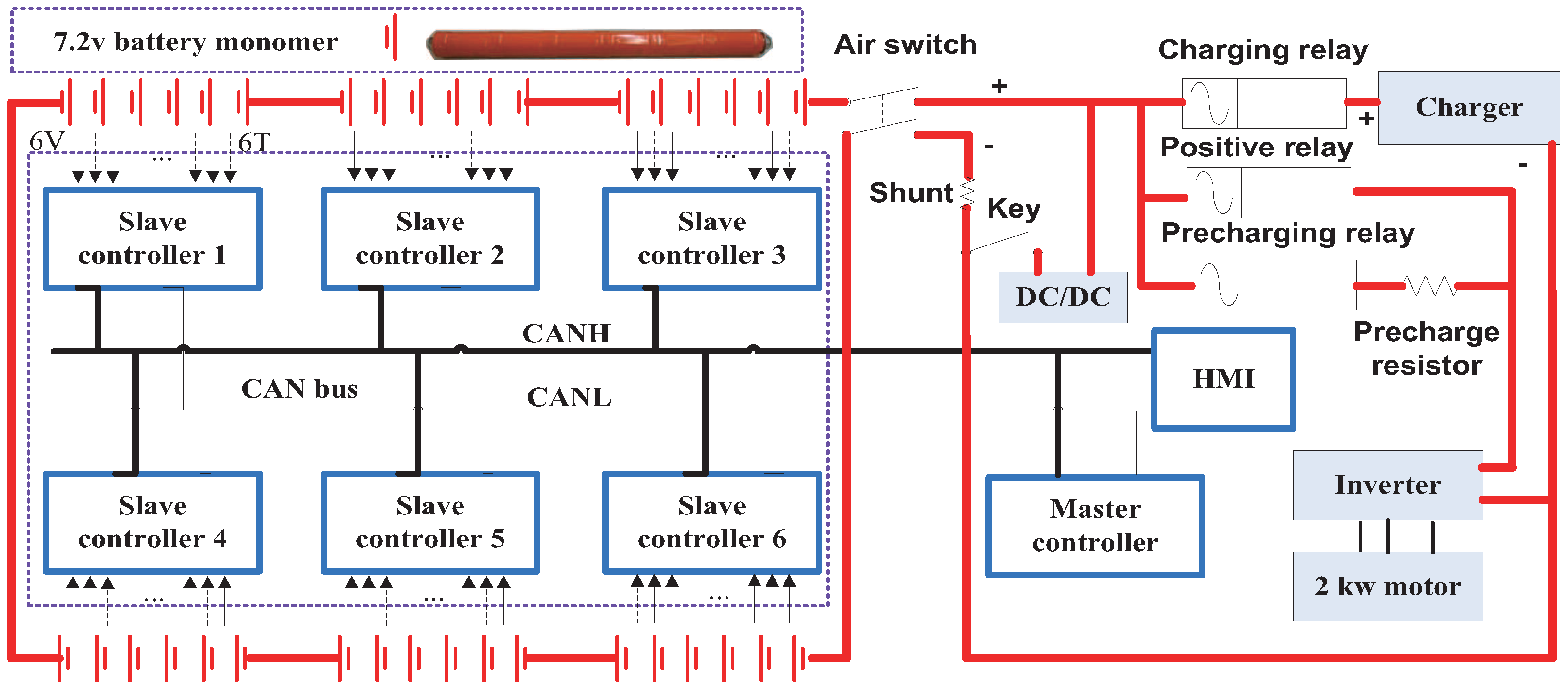
2.2. The System Structure of Electric Boat
2.3. Effective Methods of Prolonging Battery Life
- (a)
- Improvements of the battery-electrode materials and formula: formula optimizations of negative electrode and positive electrode, selection of binder and additives, optimization of electrolyte and cell design are effective methods to extend NI-MH cell cycle life [2].
- (b)
- Rational control of charging current: in general, the charging efficiency of battery decreases as the current increases, and the charging and discharging using small current has certain repairing effect on the battery [24]. However, the voltage may be not increase significantly, when NI-MH battery is charged under high SoC using small current. In this situation, improper charging current may result in battery damage.
- (c)
- Reasonable control of DoD: in a multi-cell pack, reasonable DoD is very important to improve the cycle life performance. According to the tests in a HEV NI-MH pack, cycle life can be reduced from 5000 cycles to 500 cycles while the DoD is increased from 10% to 90% [2]. Allowing the battery to run in a neutral state with low resistance characteristics can effectively reduce the battery loss and improve the service life. Certainly, it heavily relies on accuracy of SoC estimate.
- (d)
- Suitable temperature range control: at different temperatures, the battery shows different cycle life. Due to the thermostatic properties of the cave, the main consideration is heat management in charge process [5].
- (e)
- Strict protection against overcharging: The test results have shown that a small amount of over-charging or over-discharging will significantly shorten the life of batteries, although it does not cause premature failure. For example, over-charging NI-MH batteries by 0.2 V can resulted in a 40% loss of cycle life in some tests [25].
3. The Key Factors Affecting High Precision SoC Estimation
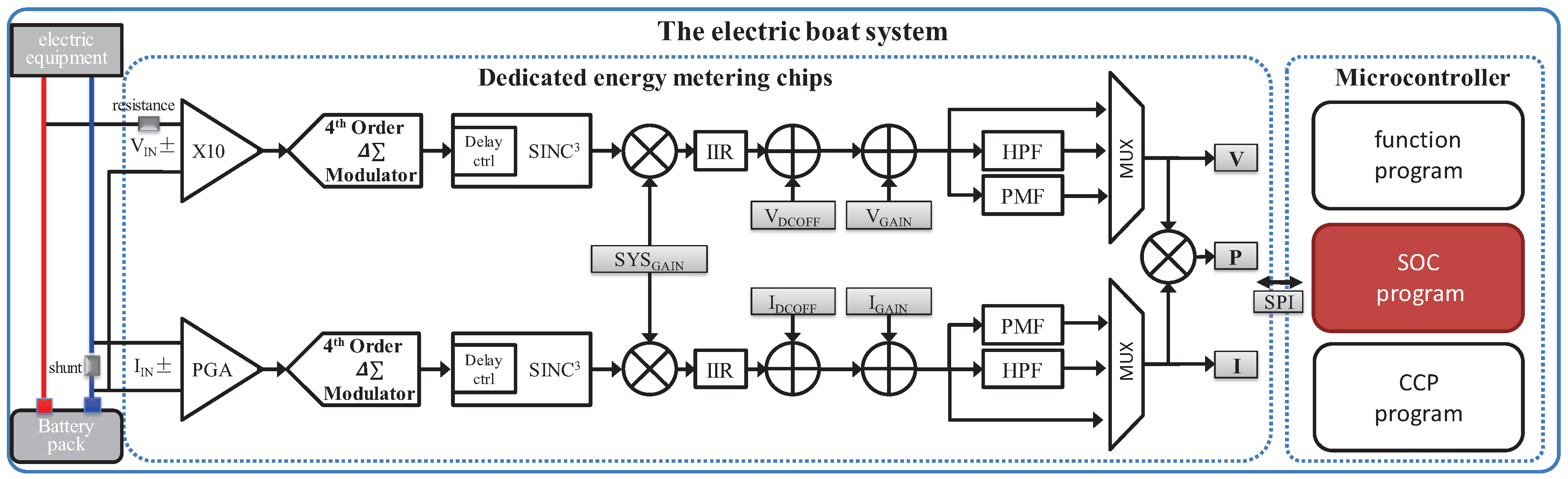
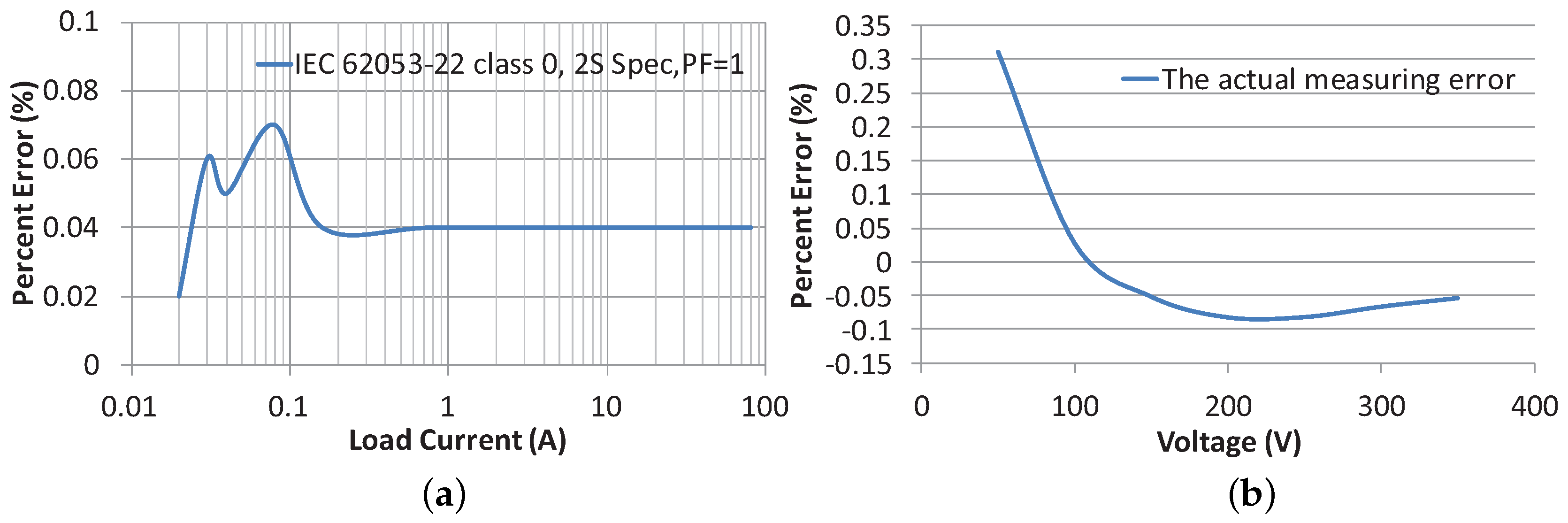
3.1. Structure and Precision of Energy Metering System
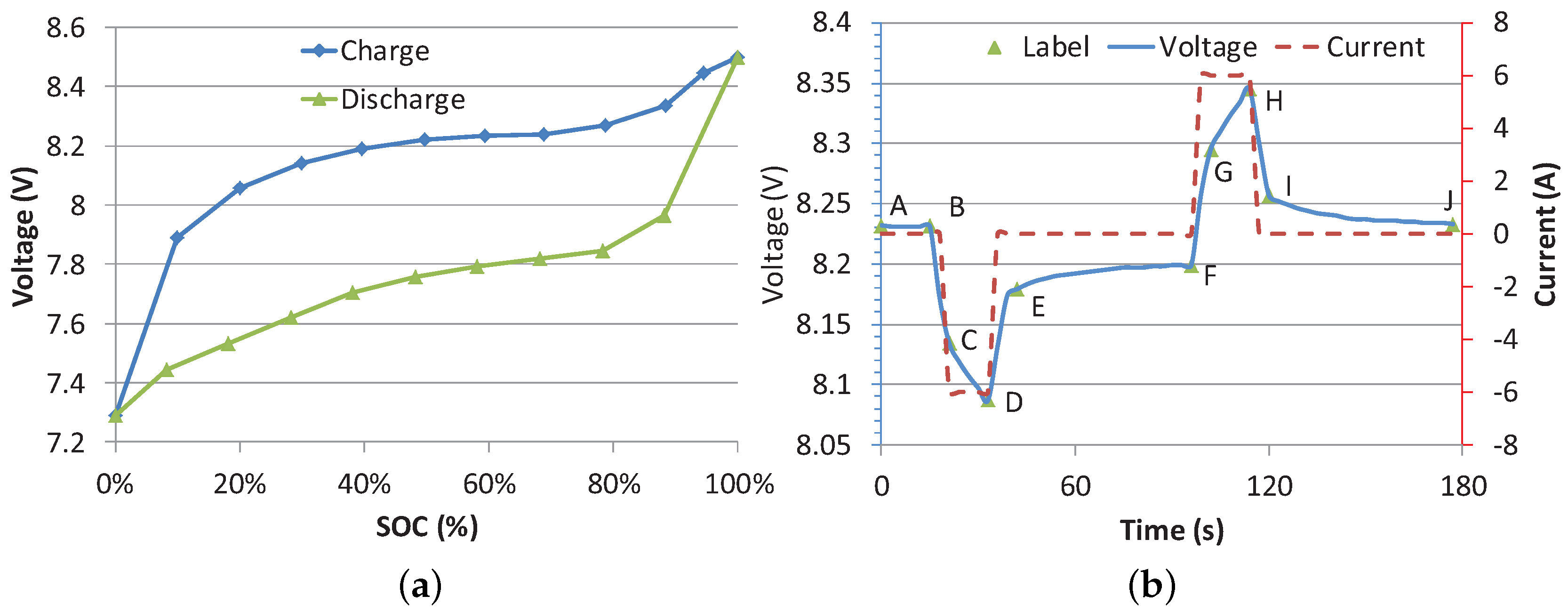
3.2. Electrical Characteristics of NI-MH Power battery
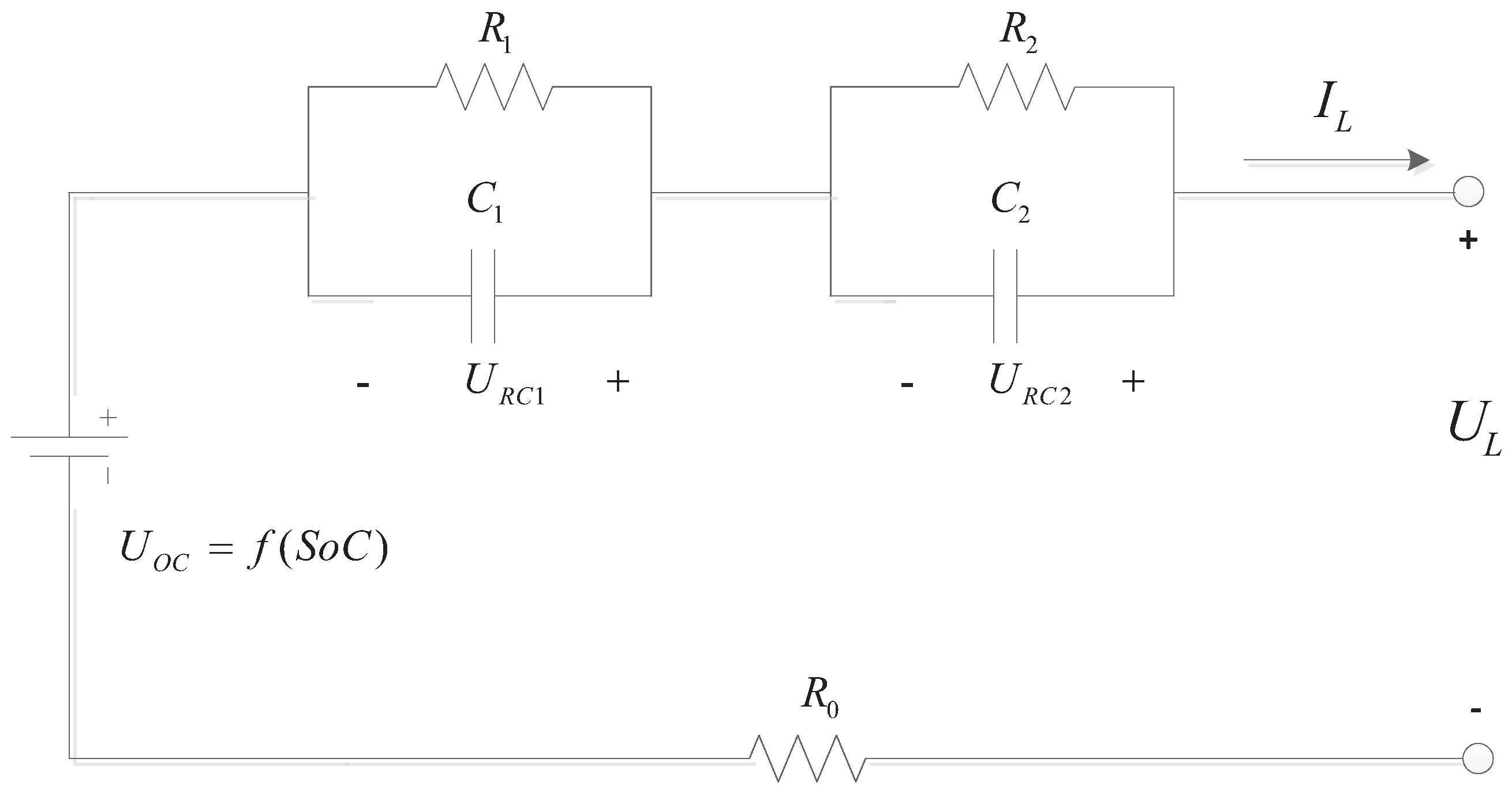
3.3. Suitable Model for NI-MH Battery
4. SoC Online Calibration and Operation Range Optimization Method
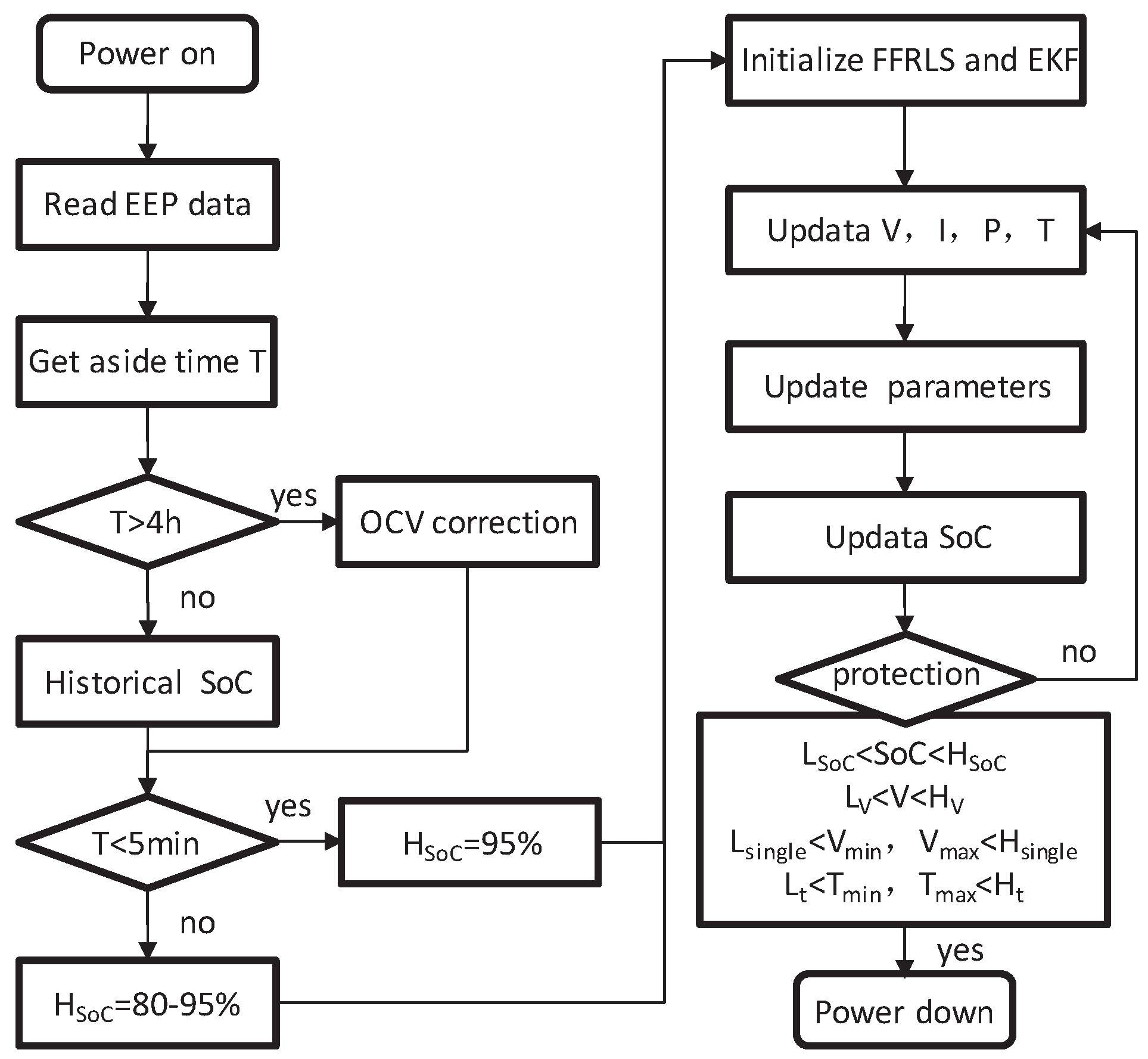
4.1. The Flow Chart of SoC Online Correction
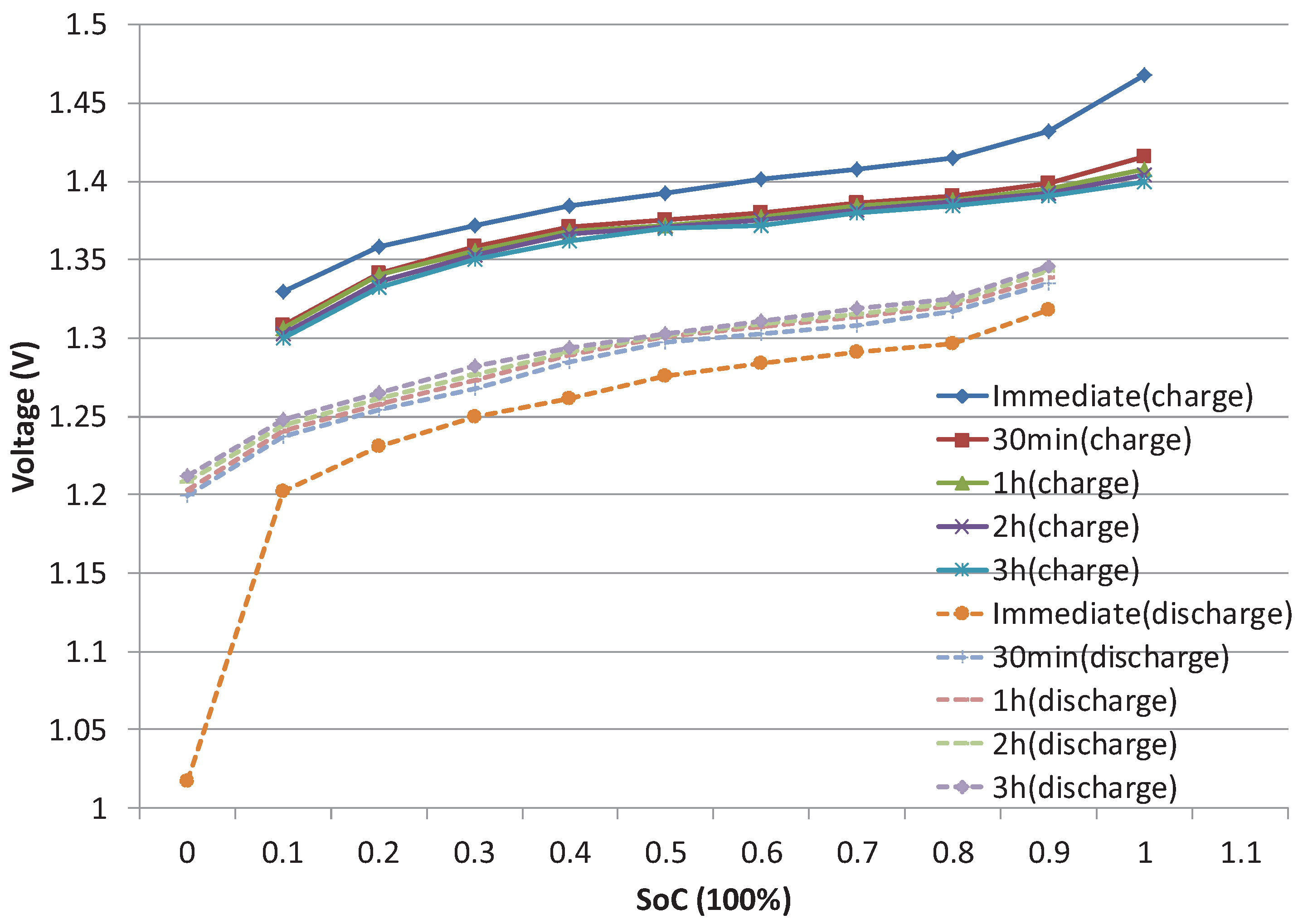
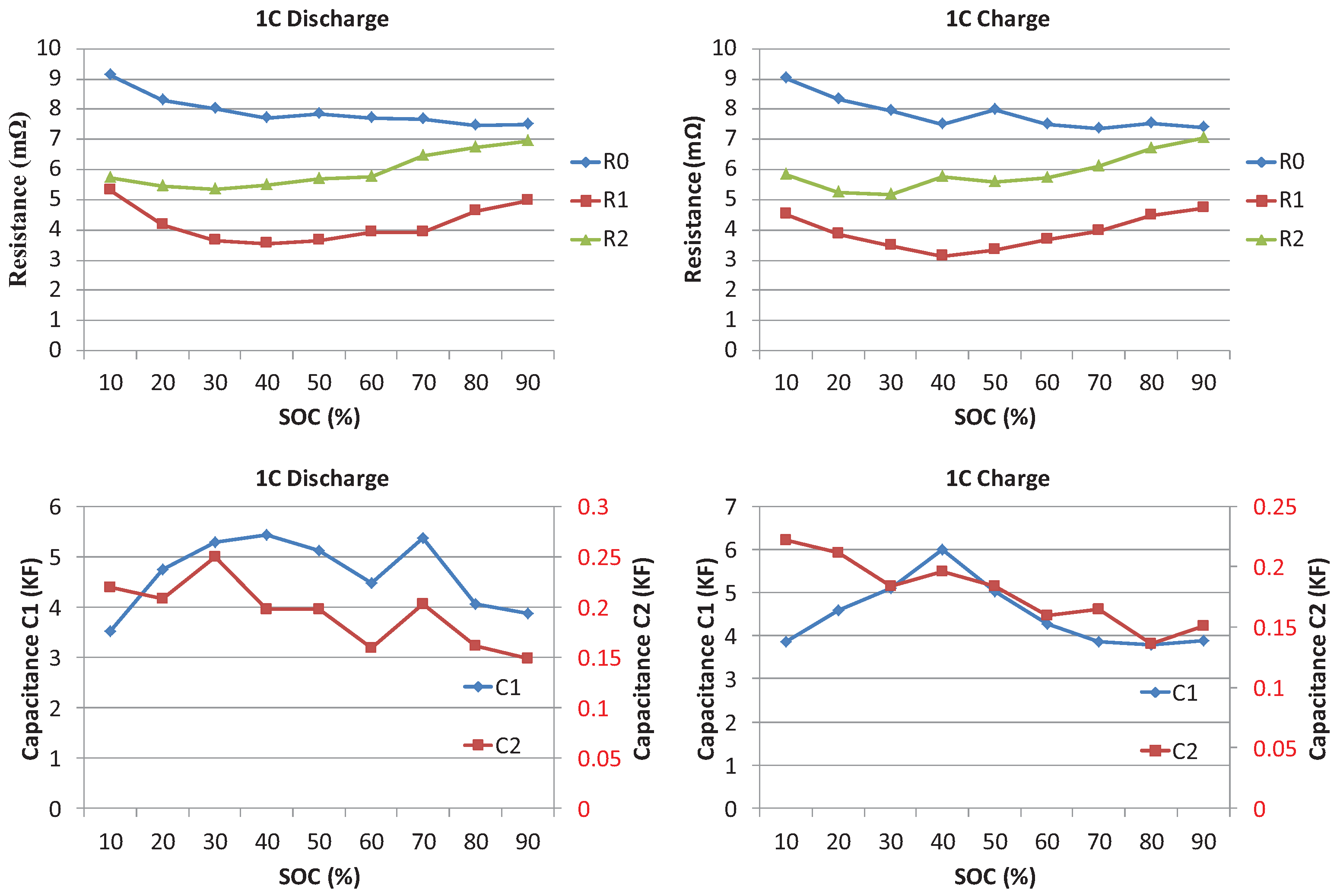
4.2. The Off-Line Parameters Fitting
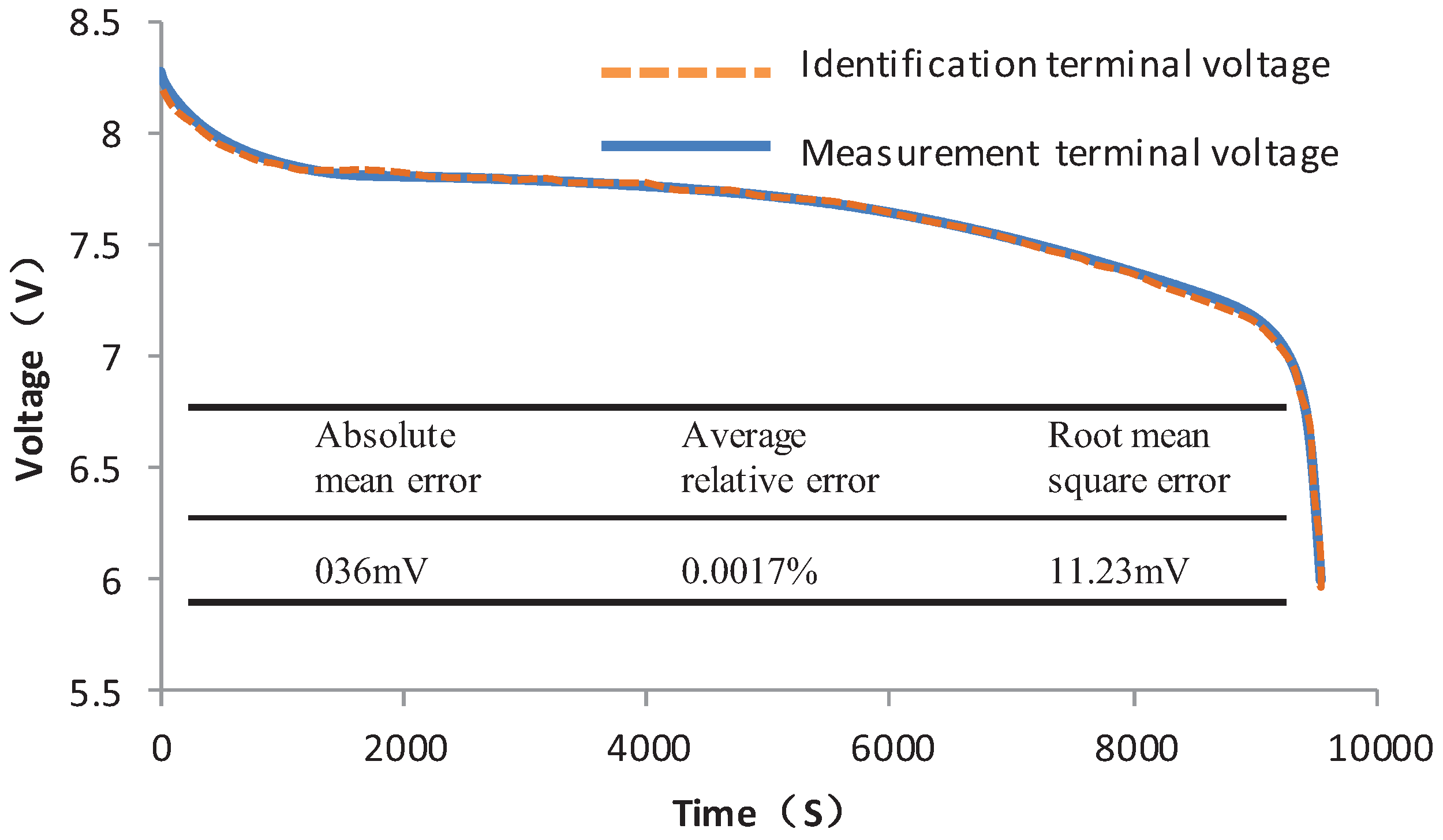
4.3. The On-Line Parameters Identification
- (1)
- The real-time voltage U and the current I have to be obtained at two points.
- (2)
- Initialize and using the results of the off-line identification, as well as the forgetting factor .
- (3)
- Using the improved FFRLS algorithm, , , , , is deduced.
- (4)
- Update the covariance matrix and forgetting factor . After loop executes of step 3 and 4 continuously, system parameters be identified in real-time.
4.4. The SoC Correction Using EKF
- (1)
- Initialize , , , , and other factor.
- (2)
- Calculate , , , , using FFRLS algorithm.
- (3)
- Obtain estimation of the state variables at k times using . Accordingly, covariance matrix is computed by .
- (4)
- Solve the kalman gain by (17).
- (5)
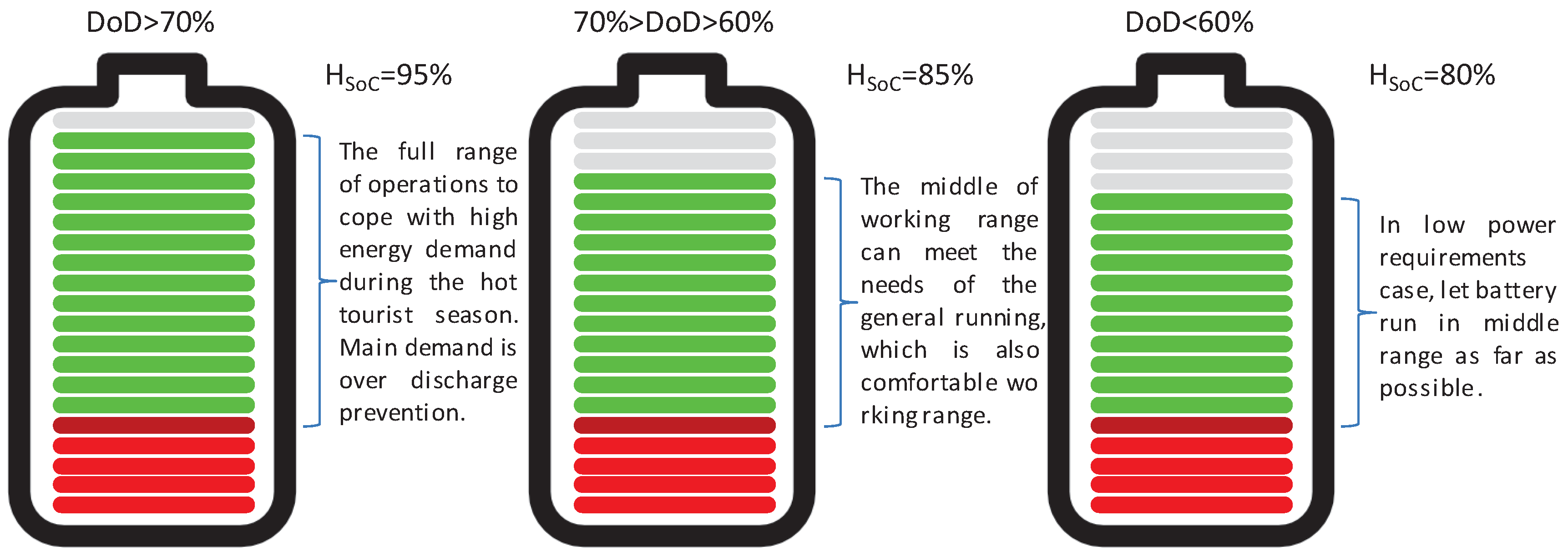
4.5. Optimization Strategy of SoC Operation Range
5. Interpretation of Result
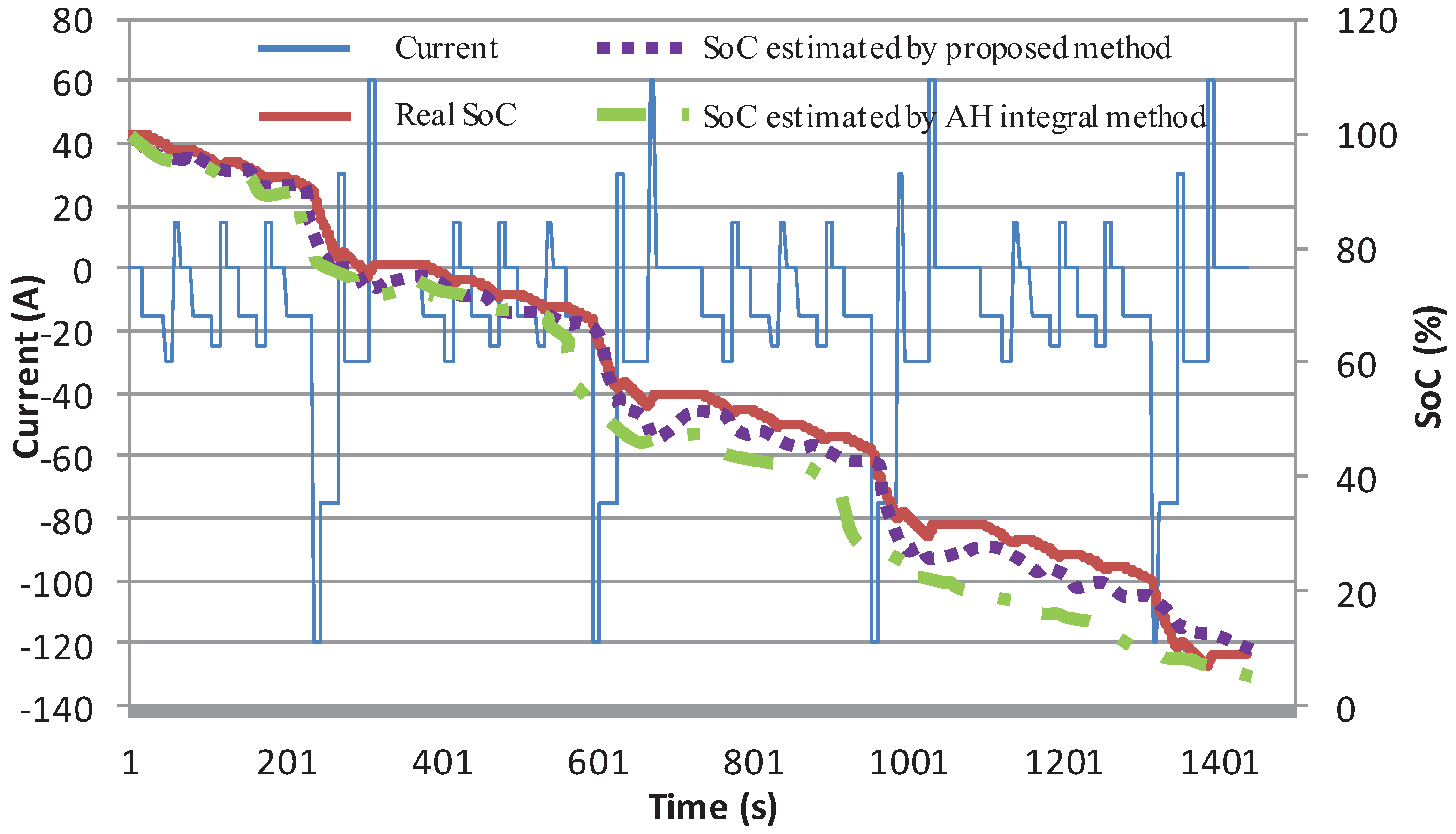
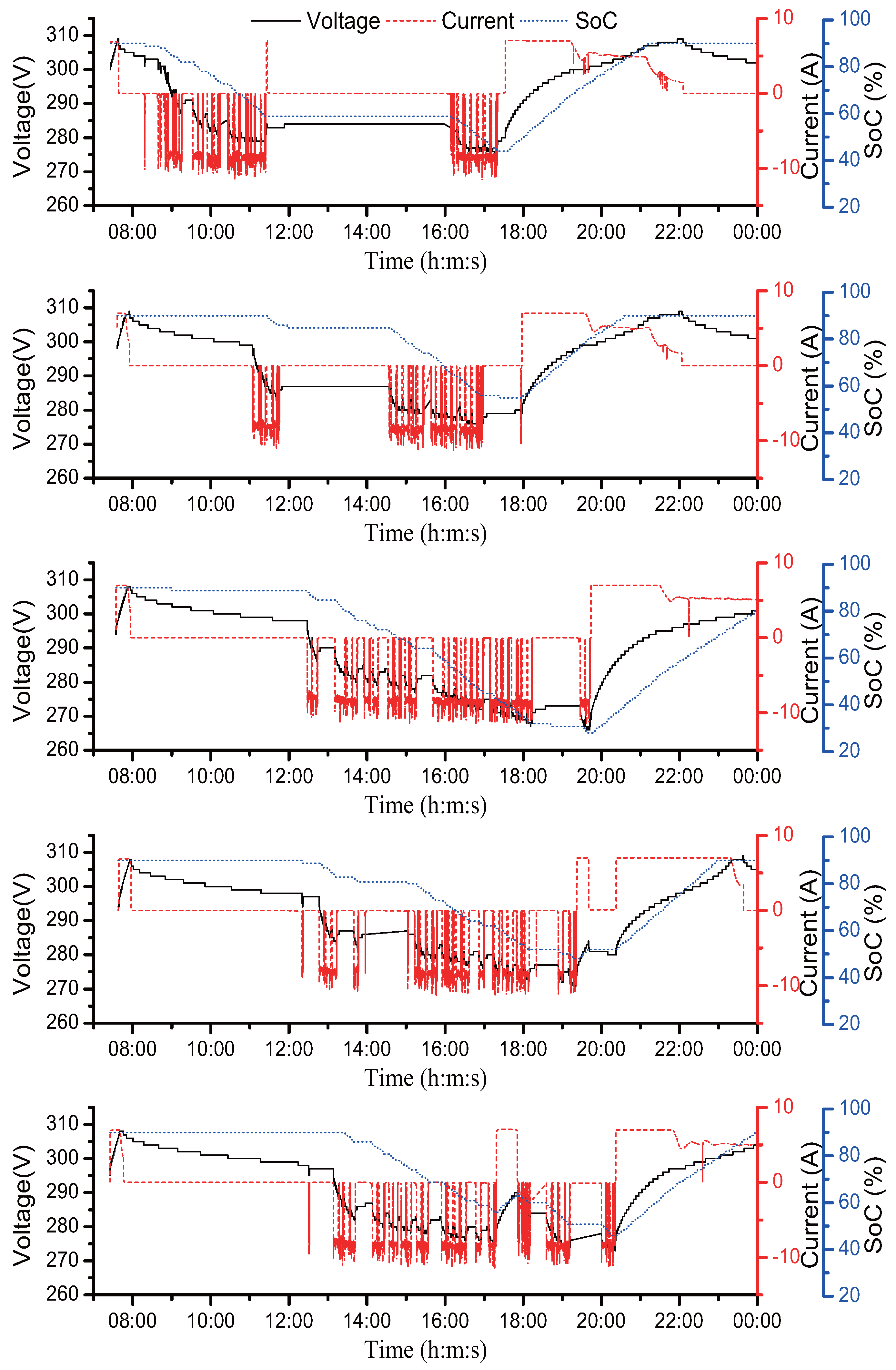
5.1. Accuracy of SoC in Continuous Days of Operation
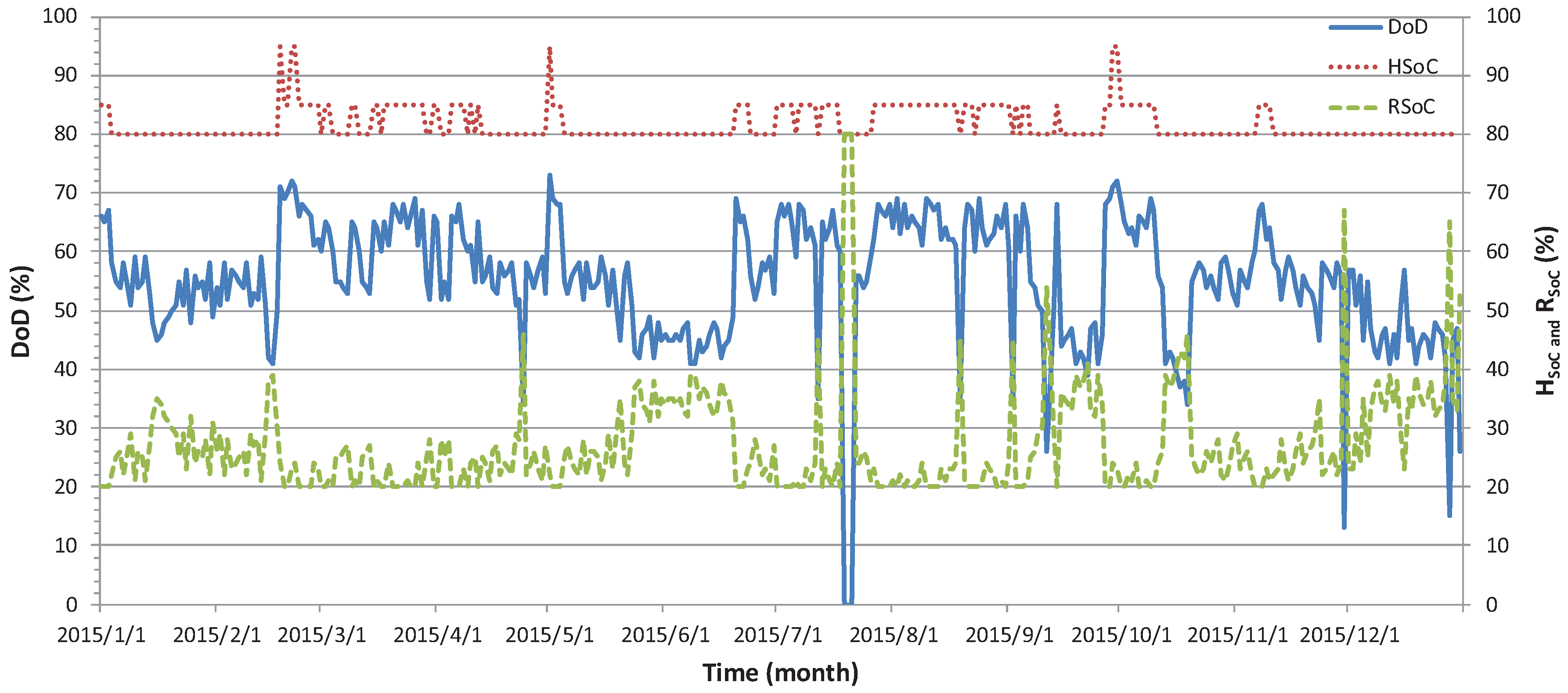
5.2. Optimal Operating Condition
5.3. Improvement of Battery Life
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pollet, B.G.; Staffell, I.; Shang, J.L. Current status of hybrid, battery and fuel cell electric vehicles: From electrochemistry to market prospects. Electrochim. Acta 2012, 84, 235–249. [Google Scholar] [CrossRef]
- Young, K.; Yasuoka, S. Capacity degradation mechanisms in nickel/metal hydride batteries. Batteries 2016, 2, 3. [Google Scholar] [CrossRef]
- Kang, J.; Yan, F.; Zhang, P.; Du, C. Comparison of comprehensive properties of Ni-MH (nickel-metal hydride) and Li-ion (lithium-ion) batteries in terms of energy efficiency. Energy 2014, 70, 618–625. [Google Scholar] [CrossRef]
- Zhu, W.H.; Zhu, Y.; Tatarchuk, B.J. Self-discharge characteristics and performance degradation of Ni-MH batteries for storage applications. Int. J. Hydrogen Energy 2014, 39, 19789–19798. [Google Scholar] [CrossRef]
- Meng, T.; Young, K.; Koch, J.; Ouchi, T.; Yasuoka, S. Failure mechanisms of nickel/metal hydride batteries with cobalt-substituted superlattice hydrogen-absorbing alloy anodes at 50 ∘C. Batteries 2016, 2, 20. [Google Scholar] [CrossRef]
- Mahlia, T.M.I.; Saktisahdan, T.J.; Jannifar, A.; Hasan, M.H.; Matseelar, H.S.C. A review of available methods and development on energy storage; technology update. Renew. Sustain. Energy Rev. 2014, 33, 532–545. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, H.; Gao, M.; Wang, Q. Advanced hydrogen storage alloys for Ni/MH rechargeable batteries. J. Mater. Chem. 2011, 21, 4743–4755. [Google Scholar] [CrossRef]
- Young, K.; Nei, J. The current status of hydrogen storage alloy development for electrochemical applications. Materials 2013, 6, 4574–4608. [Google Scholar] [CrossRef] [PubMed]
- Cheng, B.; Zhou, Y.; Zhang, J.; Wang, J.; Cao, B. Ni-MH batteries state-of-charge prediction based on immune evolutionary network. Energy Convers. Manag. 2009, 50, 3078–3086. [Google Scholar] [CrossRef]
- Xu, L.; Wang, J.; Chen, Q. Kalman filtering state of charge estimation for battery management system based on a stochastic fuzzy neural network battery model. Energy Convers. Manag. 2012, 53, 33–39. [Google Scholar] [CrossRef]
- Ouyang, L.; Huang, J.; Wang, H.; Liu, J.; Zhu, M. Progress of hydrogen storage alloys for Ni-MH rechargeable power batteries in electric vehicles: A review. Mater. Chem. Phys. 2017, 200, 164–178. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Shen, W. A Lithium-Ion Battery-in-the-Loop Approach to Test and Validate Multiscale Dual H Infinity Filters for State-of-Charge and Capacity Estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F.C. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement learning-based real-time power management for hybrid energy storage system in the plug-in hybrid electric vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Zhang, J.; Shao, G.; Guo, W.; Lou, Y.; Xia, B. Estimating the state of charge of MH-Ni batteries by measuring their stable internal pressure. J. Power Sources 2017, 343, 183–187. [Google Scholar] [CrossRef]
- Cho, M.H.; Trottier, J.; Gagnon, C.; Hovington, P.; Clément, D.; Vijh, A.; Kim, C.S.; Guerfi, A.; Black, R.; Nazar, L.; et al. The effects of moisture contamination in the Li-O2 battery. J. Power Sources 2014, 268, 565–574. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.S.; Chiew, J.H.K.; Jia, J.; Zhang, C. Design and Implementation of a Smart Lithium-Ion Battery System with Real-Time Fault Diagnosis Capability for Electric Vehicles. Energies 2017, 10, 1503. [Google Scholar] [CrossRef]
- Yang, H.; Qiu, Y.; Guo, X. Prediction of State-of-Health for Nickel-Metal Hydride Batteries by a Curve Model Based on Charge-Discharge Tests. Energies 2015, 8, 12474–12487. [Google Scholar] [CrossRef]
- Galeotti, M.; Giammanco, C.; Cinà, L.; Cordiner, S.; Di Carlo, A. Synthetic methods for the evaluation of the State of Health (SOH) of nickel-metal hydride (NiMH) batteries. Energy Convers. Manag. 2015, 92, 1–9. [Google Scholar] [CrossRef]
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Rongeat, C.; Grosjean, M.H.; Ruggeri, S.; Dehmas, M.; Bourlot, S.; Marcotte, S.; Roué, L. Evaluation of different approaches for improving the cycle life of MgNi-based electrodes for Ni-MH batteries. J. Power Sources 2006, 158, 747–753. [Google Scholar] [CrossRef]
- Li, M.M.; Yang, C.C.; Chen, L.X.; Jiang, Q. Hydrogen storage alloys/reduced graphite oxide: An efficient hybrid electrode with enhanced high-rate dischargeability. Electrochim. Acta 2016, 200, 59–65. [Google Scholar] [CrossRef]
- Fernandez, I.J.; Calvillo, C.F.; Sánchez-Miralles, A.; Boal, J. Capacity fade and aging models for electric batteries and optimal charging strategy for electric vehicles. Energy 2013, 60, 35–43. [Google Scholar] [CrossRef]
- Taheri, P.; Yazdanpour, M.; Bahrami, M. Analytical assessment of the thermal behavior of nickel-metal hydride batteries during fast charging. J. Power Sources 2014, 245, 712–720. [Google Scholar] [CrossRef]
- Serrao, L.; Chehab, Z.; Guezennee, Y.; Rizzoni, G. An aging model of Ni-MH batteries for hybrid electric vehicles. In Proceedings of the 2005 IEEE Conference on Vehicle Power and Propulsion, Chicago, IL, USA, 7 September 2005; p. 8. [Google Scholar]
- Kang, S.J. Signal Converting Apparatus of Power Metering System, Power Metering System and Method for Signal-Converting in Power Metering System. U.S. Patent 13/678,487, 18 November 2011. [Google Scholar]
- Pastorello, D.F.; King, E.T. Energy-To-Pulse Converter Systems, Devices, and Methods Wherein the Output Frequency Is Greater Than the Calculation Frequency and Having Output Phasing. U.S. Patent 6,522,982, 18 February 2003. [Google Scholar]
- Delle Femine, A.; Gallo, D.; Landi, C.; Luiso, M. Advanced instrument for field calibration of electrical energy meters. IEEE Trans. Instrum. Meas. 2009, 58, 618–625. [Google Scholar] [CrossRef]
- He, H.W.; Zhang, Y.Z.; Xiong, R.; Wang, C. A novel Gaussian model based battery state estimation approach: State-of-Energy. Appl. Energy 2015, 151, 41–48. [Google Scholar] [CrossRef]
- Sun, B.X.; Jiang, J.C.; Wang, Z.G. SoC Estimation of Ni-MH Battery Pack Based on Approved HPPC Test and EKF Algorithm for HEV. Adv. Mater. Res. 2012, 403–408, 4398–4402. [Google Scholar] [CrossRef]
- Zhang, H.; Mu, H.W.; Zhang, Y.; Han, J. Calculation and Characteristics Analysis of Lithium Ion Batteries’ Internal Resistance Using HPPC Test. Adv. Mater. Res. 2014, 926–930, 915–918. [Google Scholar] [CrossRef]
- Zhan, F.; Jiang, L.J.; Wu, B.R.; Xia, Z.H.; Wei, X.Y.; Qin, G.R. Characteristics of Ni/MH power batteries and its application to electric vehicles. J. Alloys Compd. 1999, 293, 804–808. [Google Scholar] [CrossRef]
- El Ghossein, N.; Salameh, J.P.; Karami, N.; El Hassan, M.; Najjar, M. Survey on electrical modeling methods applied on different battery types. In Proceedings of the 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2015; pp. 39–44. [Google Scholar]
- Wang, Q.; Wang, J.; Zhao, P.; Kang, J.; Yan, F.; Du, C. Correlation between the model accuracy and model-based SoC estimation. Electrochim. Acta 2017, 228, 146–159. [Google Scholar] [CrossRef]
- Lou, T.T.; Zhang, W.G.; Guo, H.Y.; Wang, J.S. The Internal Resistance Characteristics of Lithium-Ion Battery Based on HPPC Method. Adv. Mater. Res. 2012, 455–456, 246–251. [Google Scholar]
- Pisu, P.; Rizzoni, G. A comparative study of supervisory control strategies for hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2007, 15, 506–518. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Baronti, F.; Chow, M.Y. Online adaptive parameter identification and state-of-charge coestimation for lithium-polymer battery cells. IEEE Trans. Ind. Electron. 2014, 61, 2053–2061. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Tang, X.; Mao, X.; Lin, J.; Koch, B. Li-ion battery parameter estimation for state of charge. In Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; pp. 941–946. [Google Scholar]
- Partovibakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State-of-Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Mu, H.; Wang, C. A systematic model-based degradation behavior recognition and health monitoring method for lithium-ion batteries. Appl. Energy 2017, 207, 372–383. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Zheng, C.; Fu, Y.; Chris Mi, C. State of charge estimation of lithium-ion batteries in electric drive vehicles using extended Kalman filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar]
- Yu, Q.; Xiong, R.; Lin, C.; Shen, W.; Deng, J. Lithium-ion battery parameters and state-of-charge joint estimation based on H-infinity and unscented Kalman filters. IEEE Trans. Veh. Technol. 2017, 66, 8693–8701. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.S.; Woo, W.L.; Jia, J. Integrated Equivalent Circuit and Thermal Model for Simulation of Temperature-Dependent LiFePO4 Battery in Actual Embedded Application. Energies 2017, 10, 85. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M.G. A double-scale, particle-filtering, energy state prediction algorithm for lithium-ion batteries. IEEE Trans. Ind. Electron. 2018, 65, 1526–1538. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.; Lin, C. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, B.; Wang, Y.; Mao, J.; Liu, J.; Xu, G.; Dai, J. Using SoC Online Correction Method Based on Parameter Identification to Optimize the Operation Range of NI-MH Battery for Electric Boat. Energies 2018, 11, 586. https://doi.org/10.3390/en11030586
Meng B, Wang Y, Mao J, Liu J, Xu G, Dai J. Using SoC Online Correction Method Based on Parameter Identification to Optimize the Operation Range of NI-MH Battery for Electric Boat. Energies. 2018; 11(3):586. https://doi.org/10.3390/en11030586
Chicago/Turabian StyleMeng, Bumin, Yaonan Wang, Jianxu Mao, Jianwen Liu, Guochang Xu, and Jian Dai. 2018. "Using SoC Online Correction Method Based on Parameter Identification to Optimize the Operation Range of NI-MH Battery for Electric Boat" Energies 11, no. 3: 586. https://doi.org/10.3390/en11030586