Experimental Study for the Assessment of the Measurement Uncertainty Associated with Electric Powertrain Efficiency Using the Back-to-Back Direct Method


Abstract
:1. Introduction
2. Methods
2.1. General Description
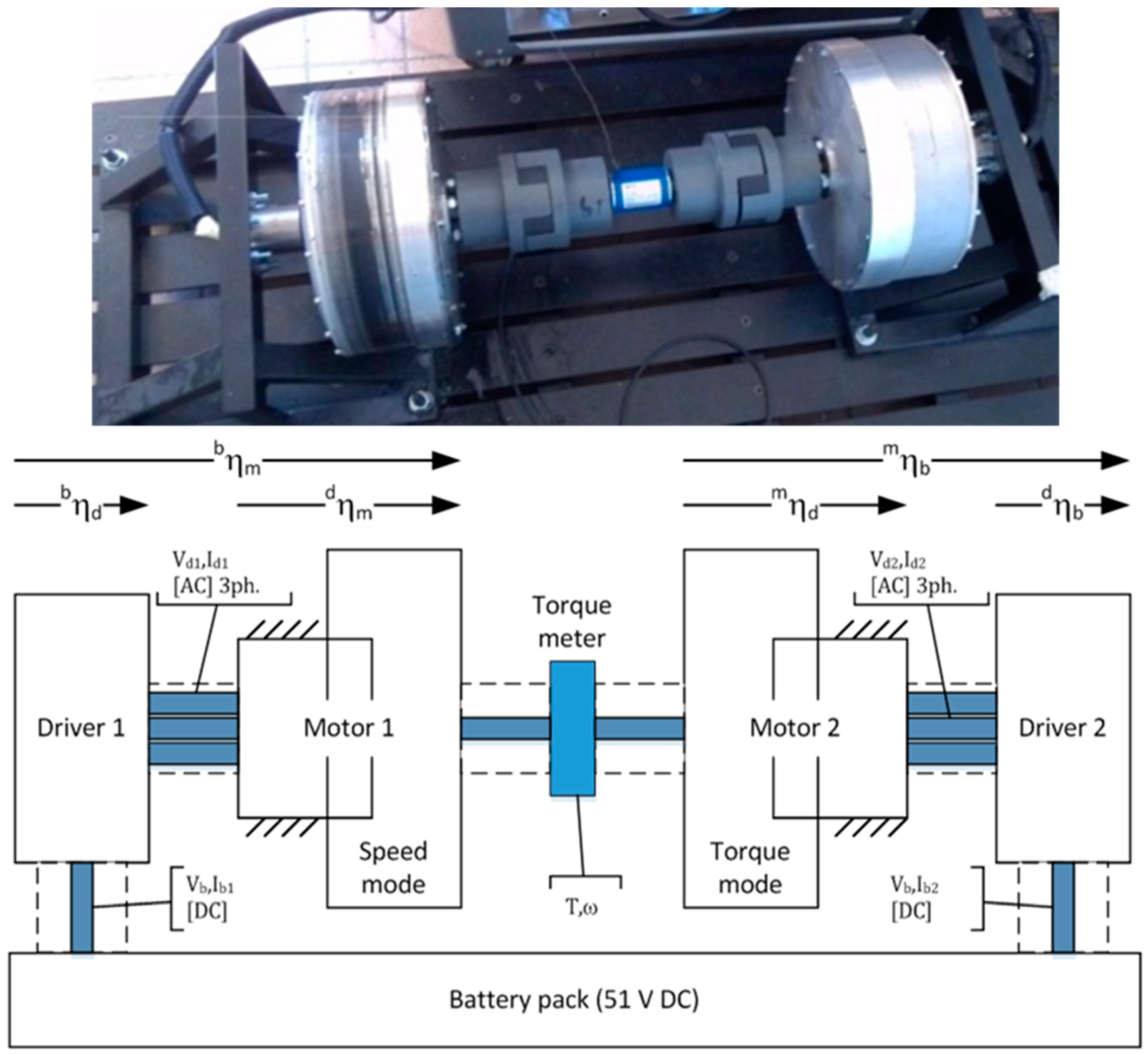
2.2. Experimental Setup
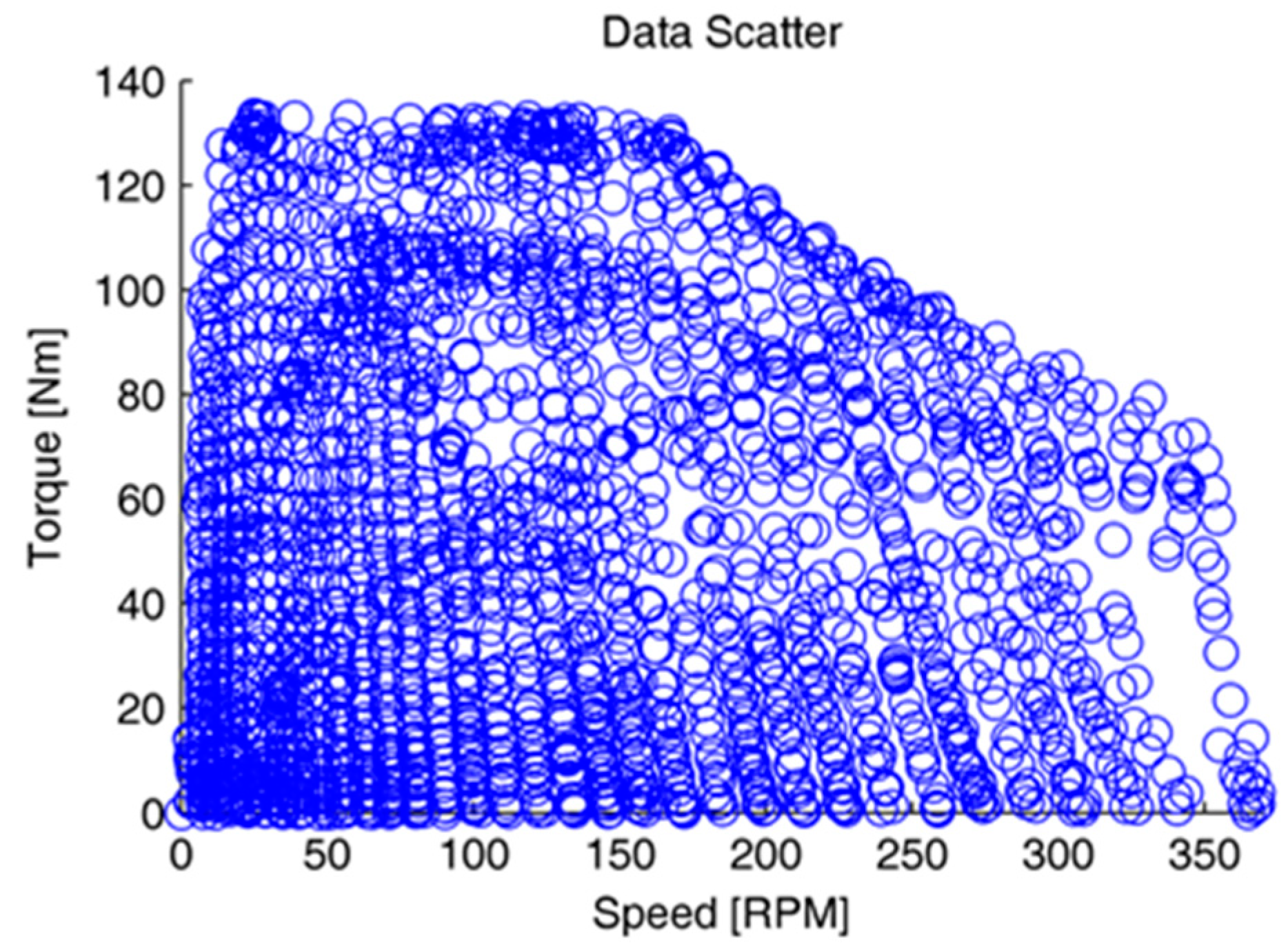
2.3. Experimental Procedure
2.4. Forward and Regenerative Mode Efficiency and Efficiency Uncertainty
3. Results and Discussion
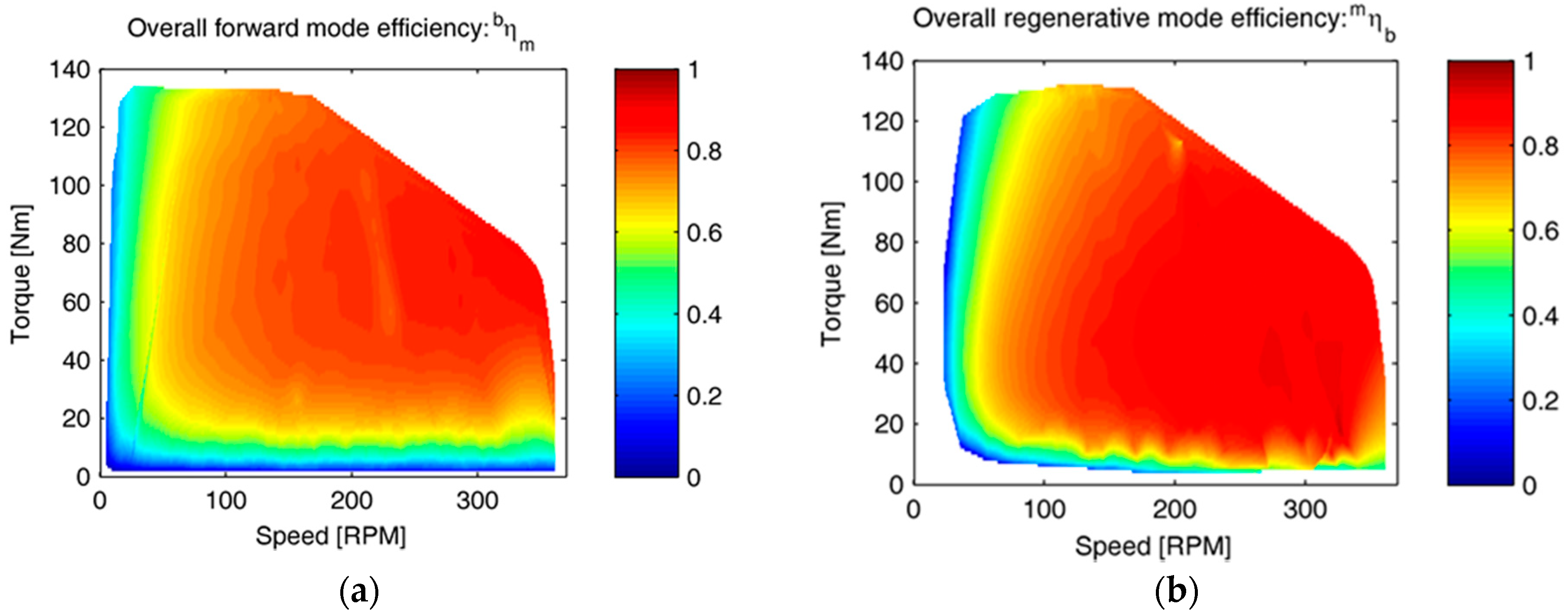
3.1. Power Train Forward-Mode and Regenerative-Mode Efficiencies and
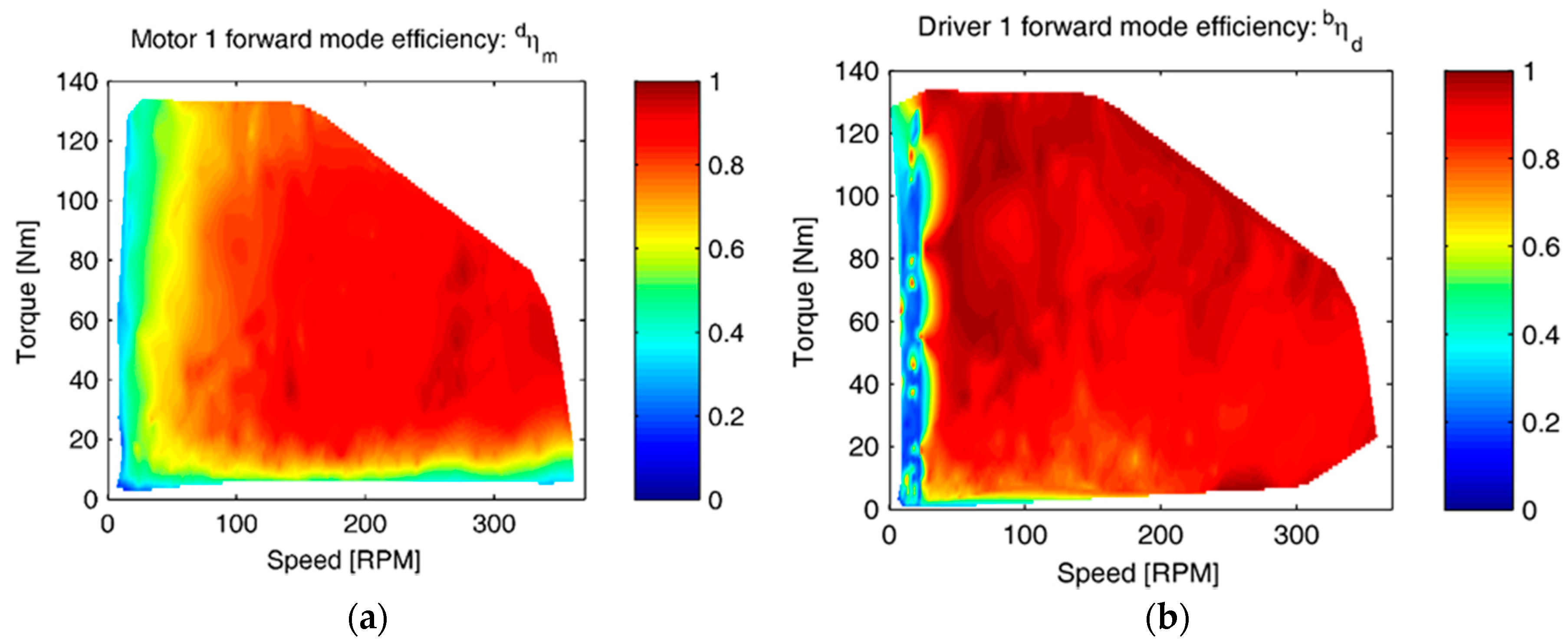
3.2. Forward-Mode Efficiencies of the Motor and Driver and
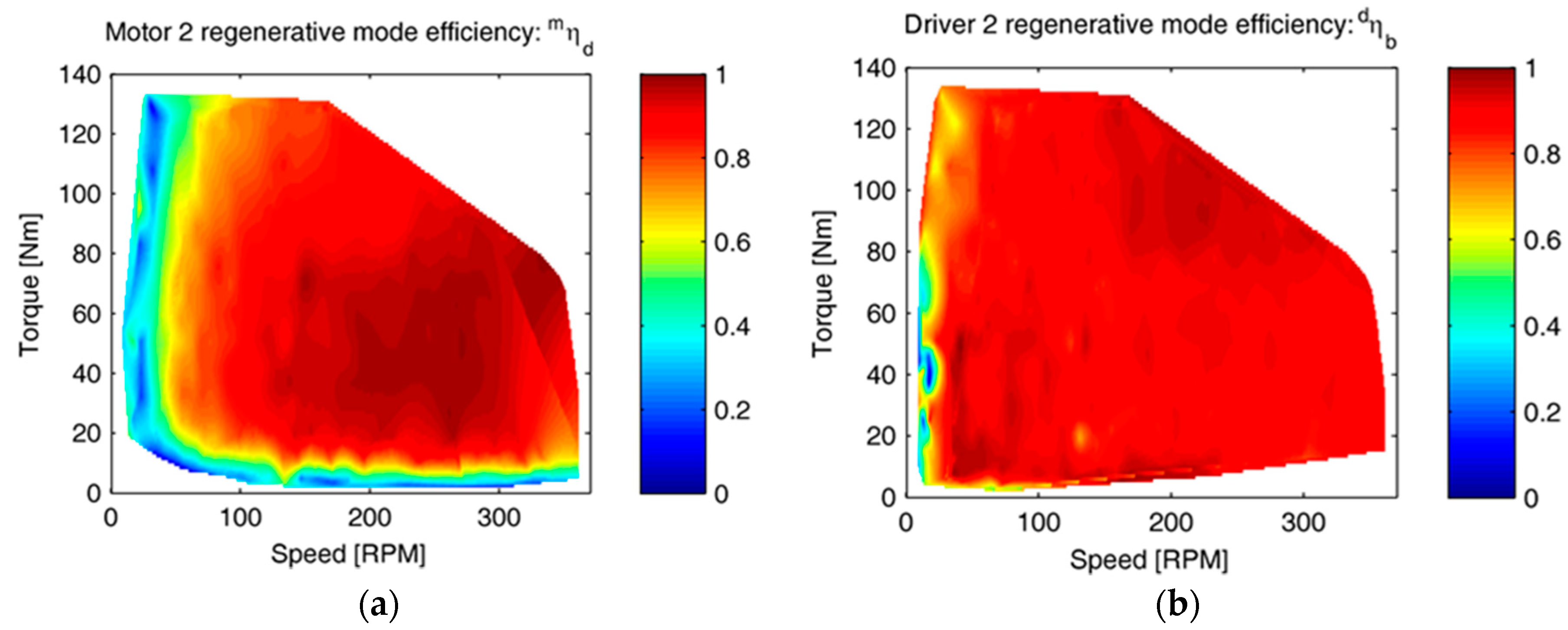
3.3. Regenerative-Mode Efficiencies of the Motor and Driver and
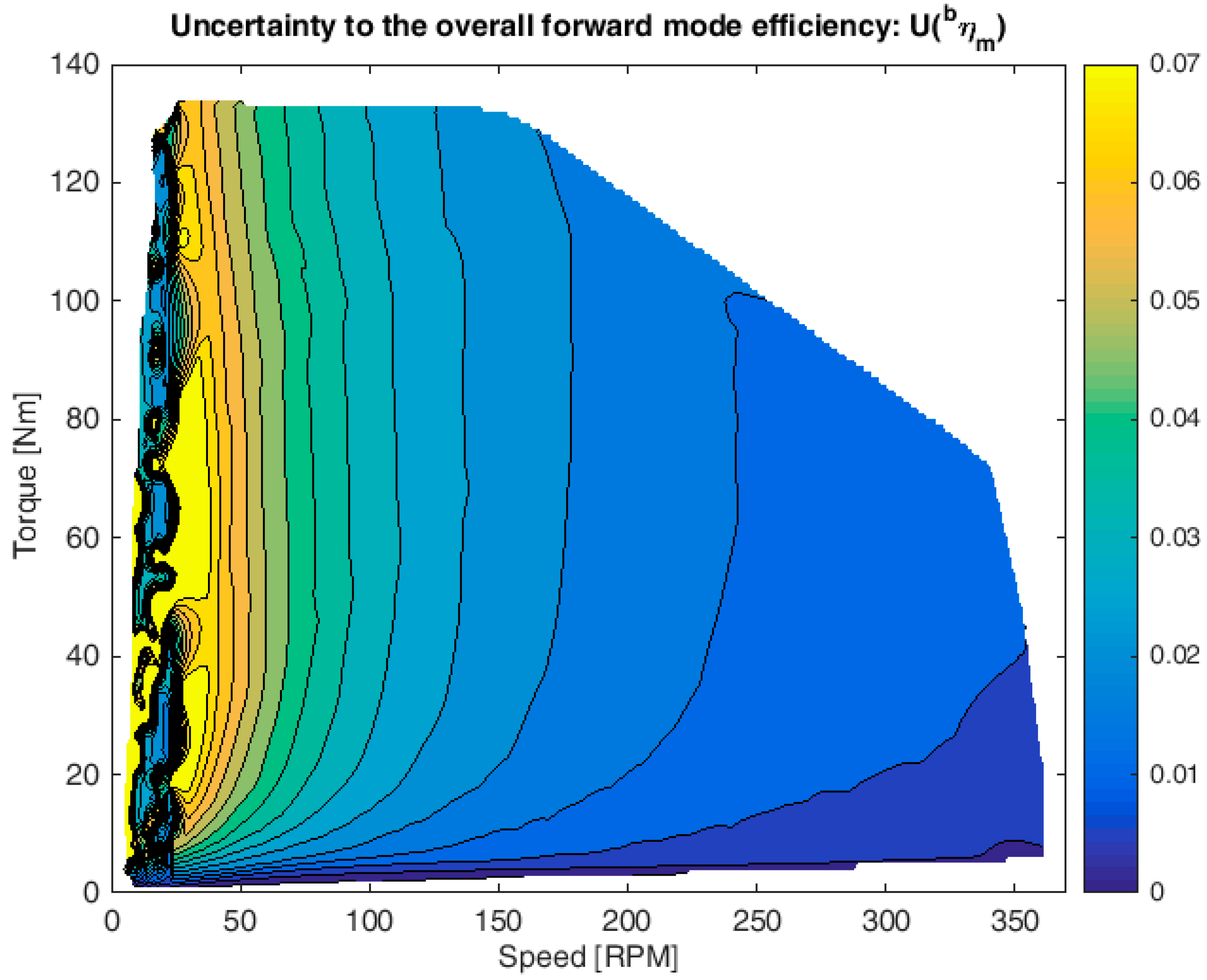
3.4. Efficiency Uncertainty
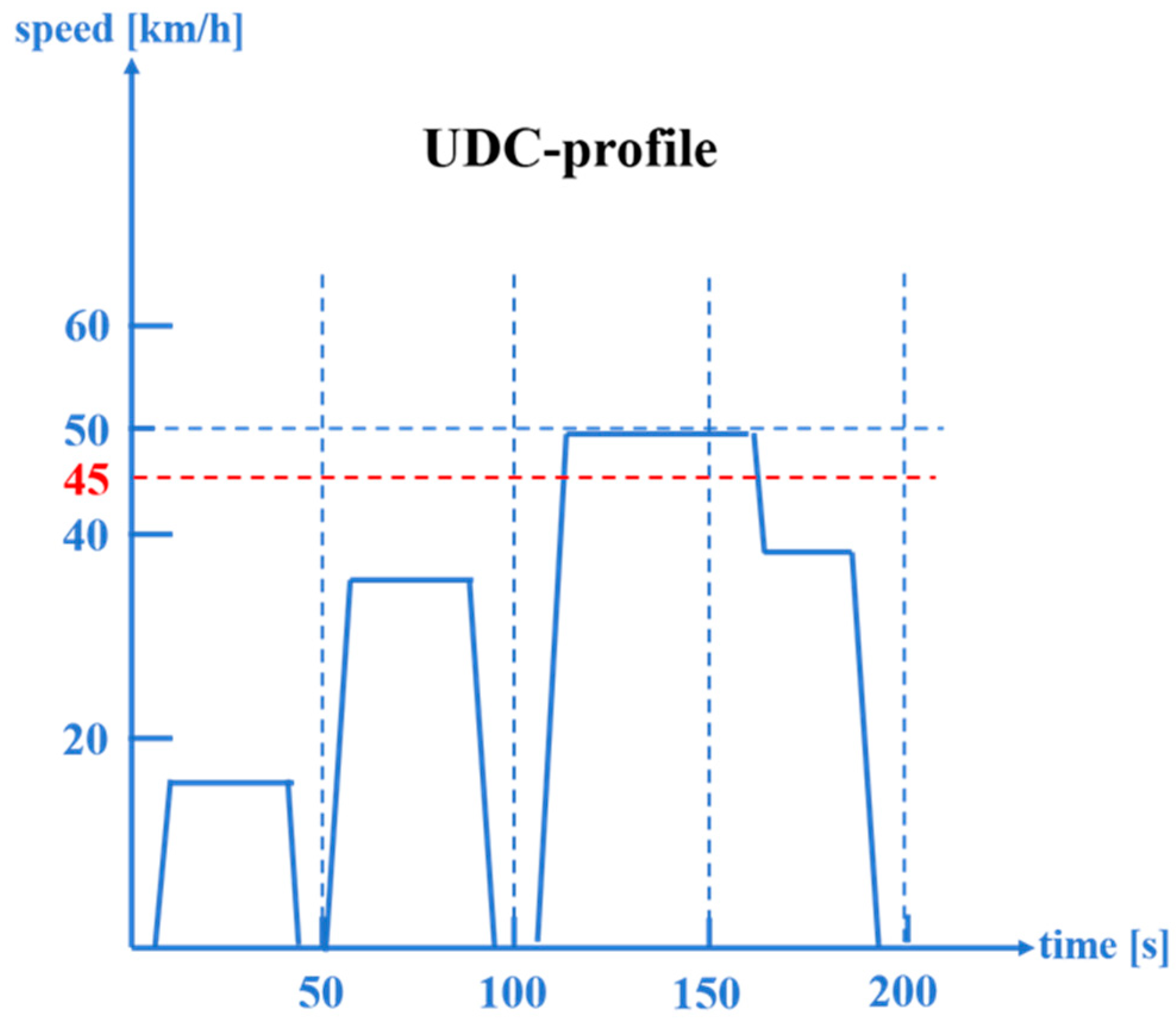
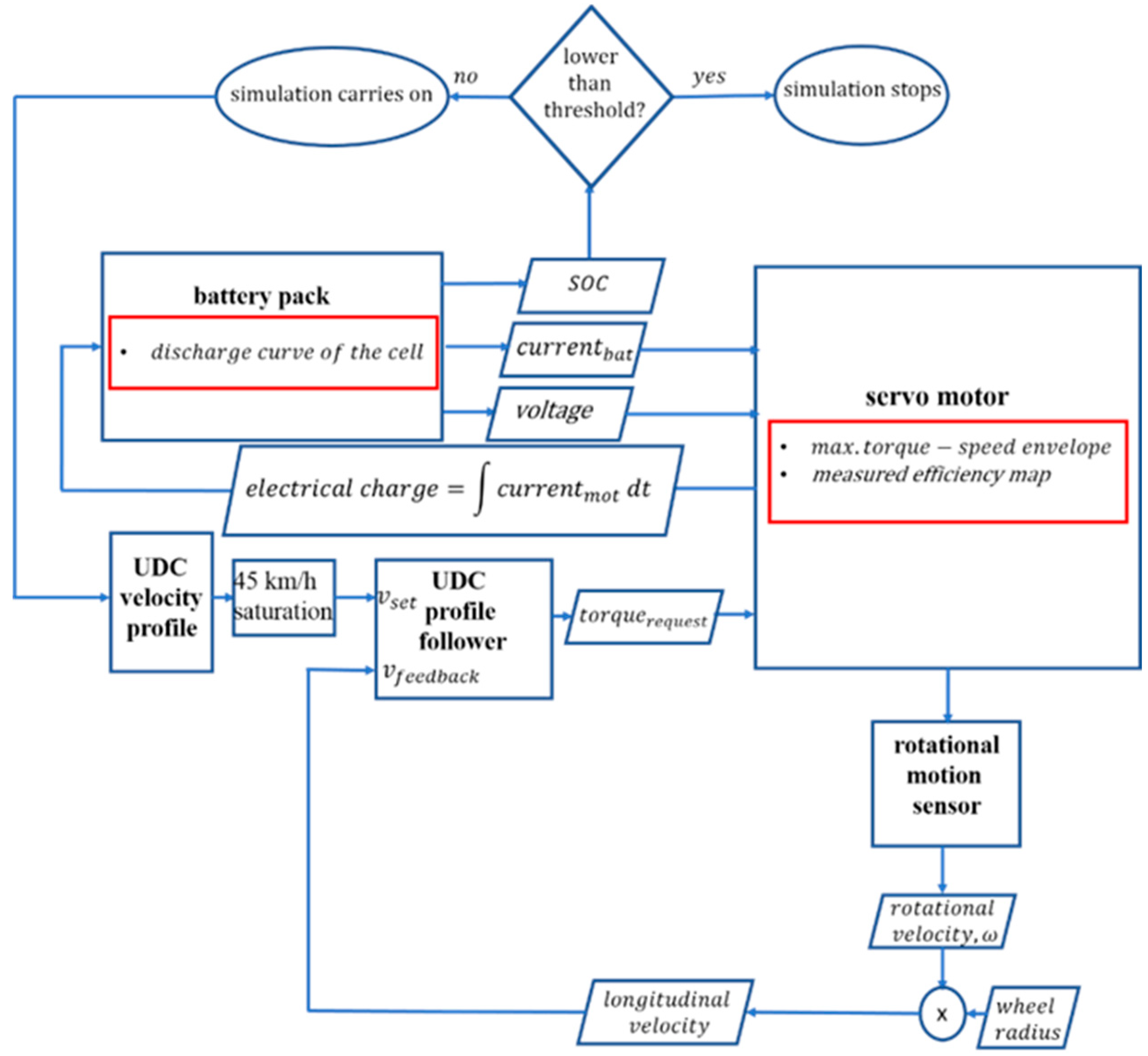
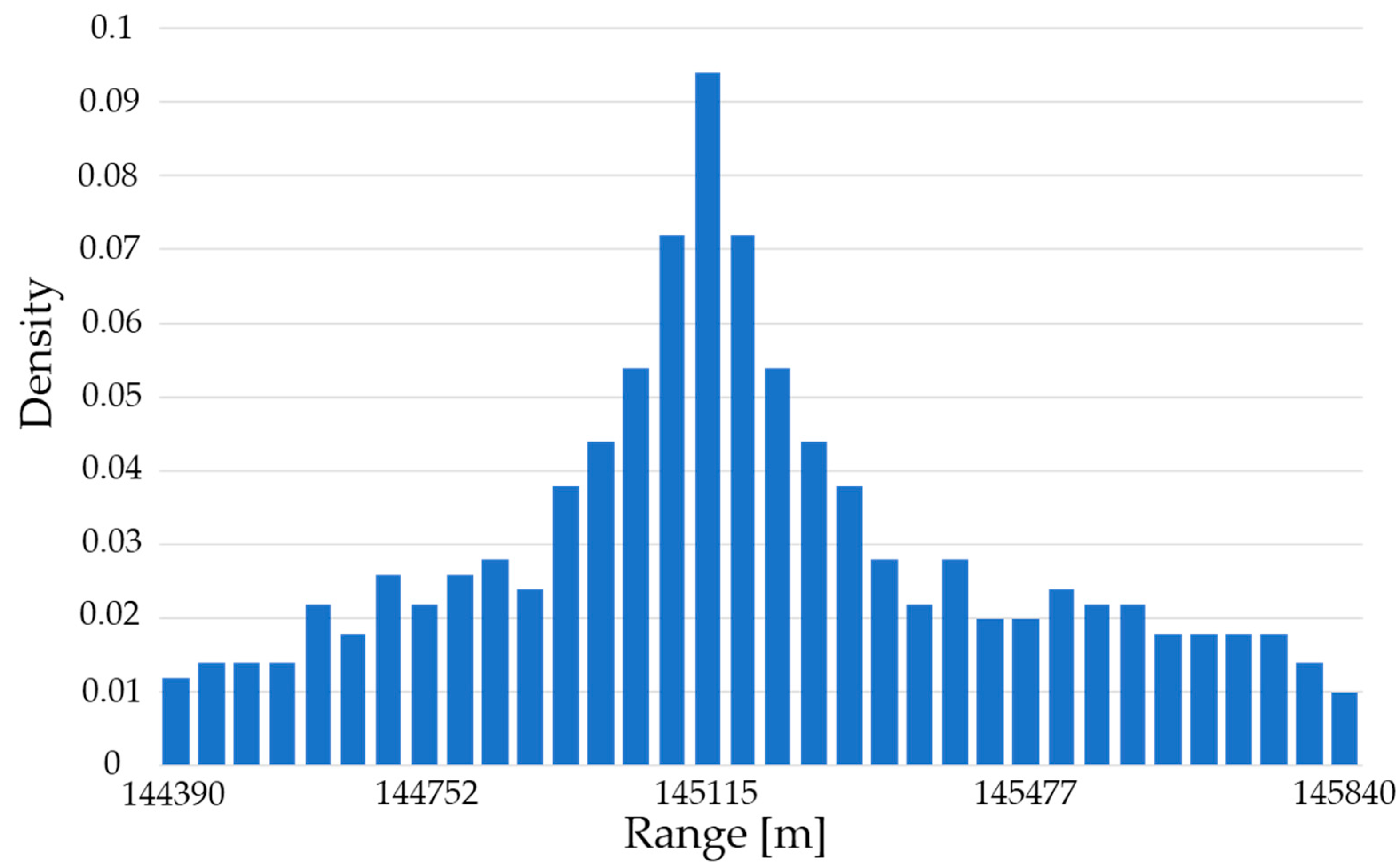
4. Simulation of an Urban Driving Cycle
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sun, L.; Chan, C.C.; Liang, R.; Wang, Q. State-of-art of Energy System for New Energy Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008. [Google Scholar] [CrossRef]
- Barlow, T.J.; Latham, S.; McCrae, I.S.; Boulter, P.G. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions, TRL Published Project Report 354. 2009. Available online: http://worldcat.org/isbn/9781846088162 (accessed on 25 Juanary 2010).
- Zhang, C.; Guo, Q.; Li, L.; Wang, M.; Wang, T. System Efficiency Improvement for Electric Vehicles Adopting a Permanent Magnet Synchronous Motor Direct Drive System. Energies 2017, 10, 2030. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Chen, M.; Zhao, H. Efficiency Testing Technology and Evaluation of the Electric Vehicle Motor Drive System. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Chen, C.; Mohr, M.; Diwoky, F. Modeling of the System Level Electric Drive Using Efficiency Maps Obtained by Simulation Methods. In Proceedings of the SAE 2014 World Congress & Exhibition, Detroit, MI, USA, 8–10 April 2014. [Google Scholar] [CrossRef]
- Oh, S.C. Evaluation of motor characteristics for hybrid electric vehicles using the hardware-in-the-loop concept. IEEE Trans. Veh. Technol. 2005, 54, 817–824. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, C.; Li, L.; Zhang, J.; Wang, M. Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines. Appl. Sci. 2016, 6, 425. [Google Scholar] [CrossRef]
- IEC TS 60034-30-2:2016, Rotating Electrical Machines—Part 30-2: Efficiency Classes of Variable Speed AC Motors (IE-code). 2016. Available online: https://webstore.iec.ch/publication/30830 (accessed on 8 December 2016).
- Bucci, G.; Ciancetta, F.; Fiorucci, E.; Ometto, A. Uncertainty issues in direct and indirect efficiency determination for three-phase induction motors: Remarks about the IEC 60034-2-1 Standard. IEEE Trans. Instrum. Meas. 2016, 65, 2701–2716. [Google Scholar] [CrossRef]
- IEC TS 60349-3:2010, Electric Traction—Rotating Electrical Machines for Rail and Road Vehicles—Part 3: Determination of the Total Losses of Converter-Fed Alternating Current Motors by Summation of the Component Losses. 2010. Available online: https://webstore.iec.ch/publication/1830 (accessed on 25 March 2010).
- Ozturk, S.B.; Toliyat, H.A. Direct torque and indirect flux control of brushless DC motor. IEEE/ASME Trans. Mechatron. 2011, 16, 351–360. [Google Scholar] [CrossRef]
- Tinazzi, F.; Zigliotto, M. Torque estimation in high-efficiency IPM synchronous motor drives. IEEE Trans. Energy Convers. 2015, 30, 983–990. [Google Scholar] [CrossRef]
- Debruyne, C.; Sergeant, P.; Derammelaere, S.; Desmet, J.J.M.; Vandevelde, L. Influence of Supply Voltage Distortion on the Energy Efficiency of Line-Start Permanent-Magnet Motors. IEEE Trans. Ind. Appl. 2014, 50, 1034–1043. [Google Scholar] [CrossRef]
- Bianchi, N.; Bottesi, O.; Alberti, L. Energy Efficiency Improvement Adopting Synchronous Motors. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Sato, D.; Itoh, J. Evaluation method of energy consumption for permanent magnet synchronous motor drive system. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 005267–005272. [Google Scholar] [CrossRef]
- Du, J.; Wang, X.; Lv, H. Optimization of magnet shape based on efficiency map of IPMSM for Evs. IEEE Trans. Appl. Supercond. 2016, 26, 1–7. [Google Scholar] [CrossRef]
- Galioto, S.J.; Reddy, P.B.; EL-Rafaie, A.M.; Alexander, J.P. Effect of magnet types on performance of high-speed spoke Interior-Permanent-Magnet machines designed for traction applications. IEEE Trans. Ind. Appl. 2015, 51, 2148–2160. [Google Scholar] [CrossRef]
- Lu, B.; Habetler, T.G.; Harley, R.G. A survey of efficiency-estimation methods for in-service induction motors. IEEE Trans. Ind. Appl. 2006, 42, 924–933. [Google Scholar] [CrossRef]
- Lu, B.; Habetler, T.G.; Harley, R.G. A nonintrusive and in-service motor-efficiency estimation method using air-gap torque with considerations of condition monitoring. IEEE Trans. Ind. Appl. 2008, 44, 1666–1674. [Google Scholar] [CrossRef]
- Al-Badri, M.; Pillay, P.; Angers, P. A Novel in situ efficiency estimation algorithm for three-phase IM using GA, IEEE method F1 calculations, and pretested motor data. IEEE Trans. Energy Convers. 2015, 30, 1092–1102. [Google Scholar] [CrossRef]
- Al-Badri, M.; Pillay, P.; Angers, P. A Novel Algorithm for Estimating Refurbished Three-Phase Induction Motors Efficiency Using Only No-Load Tests. IEEE Trans. Energy Convers. 2015, 30, 615–625. [Google Scholar] [CrossRef]
- Verucchi, C.; Ruschetti, C.; Benger, F. Efficiency measurements in induction motors: Comparison of standards. IEEE Latin Am. Trans. 2015, 13, 2602–2607. [Google Scholar] [CrossRef]
- Al-Badri, M.; Pillay, P.; Angers, P. A novel technique for in situ efficiency estimation of three-phase IM operating with unbalanced voltages. IEEE Trans. Ind. Appl. 2016, 52, 2843–2855. [Google Scholar] [CrossRef]
- Siraki, A.G.; Gajjar, C.; Khan, M.A.; Barendse, P.; Pillay, P. An algorithm for nonintrusive in situ efficiency estimation of induction machines operating with unbalanced supply conditions. IEEE Trans. Ind. Appl. 2012, 48, 1890–1900. [Google Scholar] [CrossRef]
- Sousa Santos, V.; Viego Felipe, P.; Gómez Sarduy, J. Bacterial foraging algorithm application for induction motor field efficiency estimation under unbalanced voltages. Measurement 2013, 46, 2232–2237. [Google Scholar] [CrossRef]
- Sakthivel, V.P.; Bhuvaneswari, R.; Subramanian, S. An accurate and economical approach for induction motor field efficiency estimation using bacterial foraging algorithm. Measurement 2011, 44, 674–684. [Google Scholar] [CrossRef]
- Gajjar, C.S.; Kinyua, J.M.; Khan, M.A.; Barendse, P.S. Analysis of a nonintrusive efficiency estimation technique for induction machines compared to the IEEE 112B and IEC 34-2-1 standards. IEEE Trans. Ind. Appl. 2015, 51, 4541–4553. [Google Scholar] [CrossRef]
- Siraki, A.; Pillay, P. An in-situ efficiency estimation technique for induction machines working with unbalanced supplies. IEEE Trans. Energy Convers. 2012, 27, 85–95. [Google Scholar] [CrossRef]
- SAE J2907, Performance Characterization of Electrified Powertrain Motor-Drive Subsystem. 2018. Available online: https://www.sae.org/standards/content/j2907_201802/ (accessed on 12 February 2018).
- Krajewski, M. Constructing an uncertainty budget for voltage RMS measurement with a sampling voltmeter. Metrologia 2018, 55, 95–105. [Google Scholar] [CrossRef] [Green Version]
- Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement, JCGM 100:2008, (GUM 1995 with Minor Corrections). Available online: https://www.iso.org/standard/50461.html (accessed on 20 November 2010).
- Bonges, H.A., III; Lusk, A.C. Addressing electric vehicle (EV) sales and range anxiety through parking layout, policy and regulation. Transp. Res. Part A 2016, 83, 63–73. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Lee, C. Does Driving Range of Electric Vehicles Influence Electric Vehicle Adoption? Sustainability 2017, 9, 1783. [Google Scholar] [CrossRef]
- Vidhi, R.; Shrivastava, P. A Review of Electric Vehicle Lifecycle Emissions and Policy Recommendations to Increase EV Penetration in India. Energies 2018, 11, 483. [Google Scholar] [CrossRef]
- Ko, J.; Jin, D.; Jang, W.; Myung, C.; Kwon, S.; Park, S. Comparative investigation of NOx emission characteristics from a Euro 6-compliant diesel passenger car over the NEDC and WLTC at various ambient temperatures. Appl. Energy 2017, 187, 652–662. [Google Scholar] [CrossRef]
- Tsiakmakis, S.; Fontaras, G.; Ciuffo, B.; Samaras, Z. A simulation-based methodology for quantifying european passenger car fleet CO2 emissions. Appl. Energy 2017, 199, 447–465. [Google Scholar] [CrossRef]
- Tsokolis, D.; Tsiakmakis, S.; Dimaratos, A.; Fontaras, G.; Pistikopoulos, P.; Ciuffo, B.; Samaras, Z. Fuel consumption and CO2 emissions of passenger cars over the new worldwide harmonized test protocol. Appl. Energy 2016, 179, 1152–1165. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Ouyang, M. Energy consumption of electric vehicles based on real-world driving patterns: A case study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- Chen, L.; Wang, J.; Lazari, P.; Chen, X. Optimizations of a permanent magnet machine targeting different driving cycles for electric vehicles. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013; pp. 855–862. [Google Scholar] [CrossRef]
- Tranchoa, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Prieto, P.; Martínez de Alegría, I.; Andreu, J.; López, I. Sensorless control strategy for light-duty EVs and efficiency loss evaluation of high frequency injection under standardized urban driving cycles. Appl. Energy 2018, 224, 647–658. [Google Scholar] [CrossRef]
- De Santis, M.; Agnelli, S.; Silvestri, L.; Di Ilio, G.; Giannini, O. Characterization of the powertrain components for a hybrid quadricycle. In Proceedings of the international conference of numerical analysis and applied mathematics 2015 (ICNAAM 2015), Rhodi, Greece, 22–28 September 2015. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Condition | Voltage Range for Gen4 36/48V Controller |
|---|---|
| Conventional working voltage range | 25.2 V to 57.6 V |
| Working voltage limits | 19.3 V to 69.6 V |
| Non-operational overvoltage limits | 79.2 V |
| Quantity | Device | Accuracy | Distribution |
|---|---|---|---|
| Torque | Torque meter | ±0.1% reading | 2 |
| DS1104 | ±0.1% reading | 2 | |
| Speed | Inverter | ±1 rpm reading | √3 |
| DC voltage and DC current | DAQ NI 9206 | ±0.1% full scale | 2 |
| Shunt resistor | ±0.25% reading | √3 | |
| AC motor current | Oscilloscope | ±3% reading | √3 |
| Clamp meter | ±3% reading ± 50 mA full scale | √3 | |
| AC motor voltage | Oscilloscope | ±3% reading | √3 |
| Differential probe | ± 2% full scale | √3 |
| Synchronous Motor | Asynchronous Motor | Uncertainty of the Measured Efficiency | Uncertainty of the Estimated Efficiency |
|---|---|---|---|
| Back to back method | - | ±3.75% | _ |
| - | Method in Reference [9] | ±0.7% | ±0.5% |
| - | Method in Reference [21] | ±0.6% | ±0.03% |
| - | Method in Reference [23] | - | ±0.4% |
| - | Method in Reference [28] | ±0.65% | ±0.35% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Santis, M.; Agnelli, S.; Patanè, F.; Giannini, O.; Bella, G. Experimental Study for the Assessment of the Measurement Uncertainty Associated with Electric Powertrain Efficiency Using the Back-to-Back Direct Method. Energies 2018, 11, 3536. https://doi.org/10.3390/en11123536
De Santis M, Agnelli S, Patanè F, Giannini O, Bella G. Experimental Study for the Assessment of the Measurement Uncertainty Associated with Electric Powertrain Efficiency Using the Back-to-Back Direct Method. Energies. 2018; 11(12):3536. https://doi.org/10.3390/en11123536
Chicago/Turabian StyleDe Santis, Michele, Sandro Agnelli, Fabrizio Patanè, Oliviero Giannini, and Gino Bella. 2018. "Experimental Study for the Assessment of the Measurement Uncertainty Associated with Electric Powertrain Efficiency Using the Back-to-Back Direct Method" Energies 11, no. 12: 3536. https://doi.org/10.3390/en11123536