Energy Efficiency Analysis of Multi-Type Floating Bodies for a Novel Heaving Point Absorber with Application to Low-Power Unmanned Ocean Device


Abstract
:1. Introduction
2. Structure Model
3. Mathematical Model
3.1. Hydrodynamics Model of the Floating Body
3.2. Energy Efficiency Model of the Floating Body
4. Algebraic Solution
5. Numerical Results
6. Discussion
7. Conclusions
- (1)
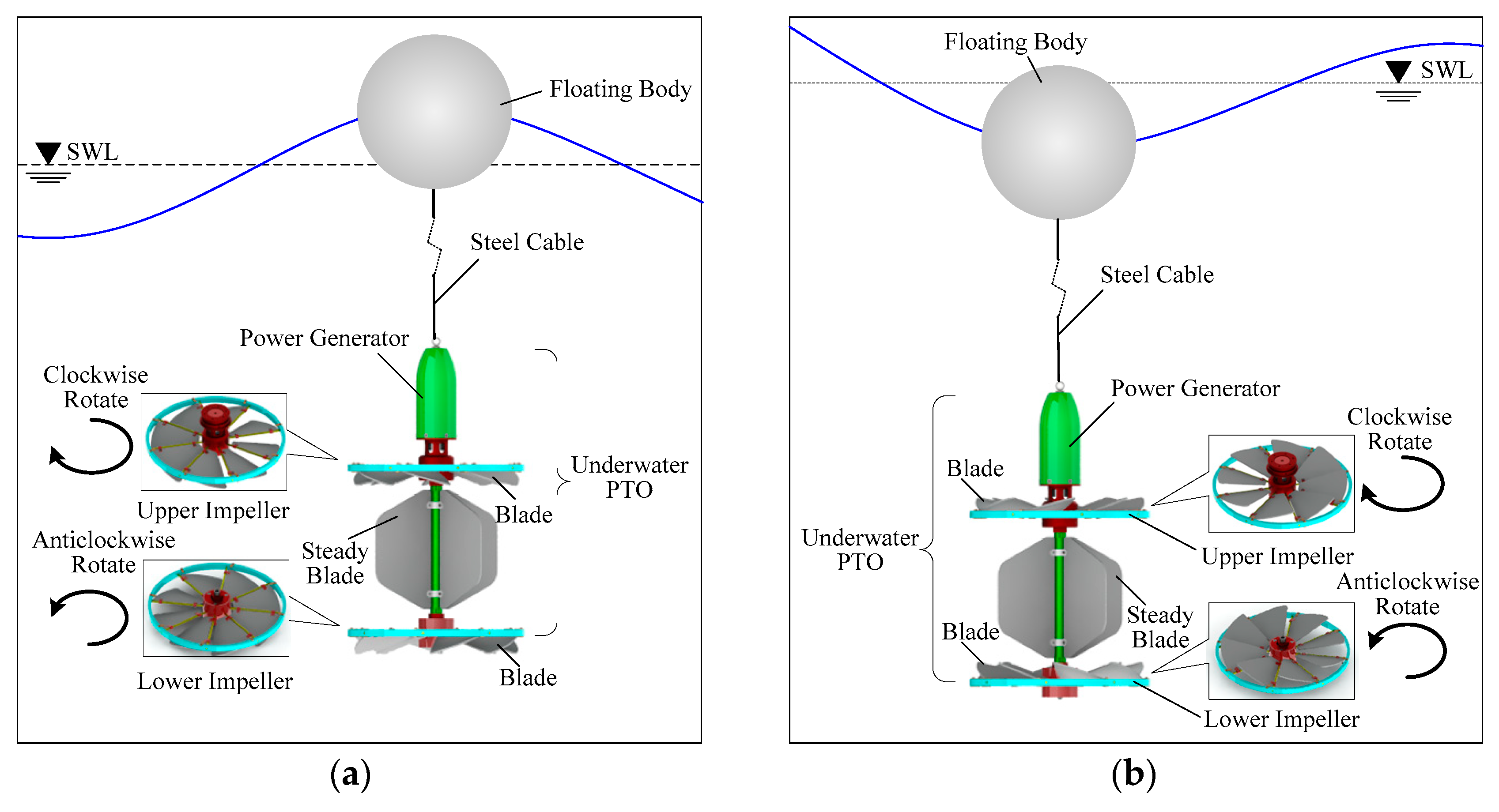
- The structure model and working principle of the novel heaving point absorber are feasible. Based on the optimal power supply strategy, the design of the release and recovery mechanism can improve the concealment, release, and recovery rate of the unmanned ocean devices. Under the different directions of water flows, the design of the upper and lower impeller with opposite rotation directions can provide continuous relative rotational motion to the generator during rising and sinking of the Underwater PTO. The design of the locking devices and impellers’ blades with circumference array can achieve the adaptively adjust the blade deflection in the heaving motion and the relative rotation of the impellers. The design of the steady blade can balance the motion of Underwater PTO and makes it not limited by the motion of heaving.
- (2)
- The energy efficiency of the novel heaving point absorber is greatly affected by the geometric parameters, the wave force, the motion displacement, the motion velocity, and the capture width ratio of the floating body. The constitutive relation of the above parameters of the floating body is constructed. In order to calculate the above parameters, the Froude-Krylov method is used, which effectively overcomes the inaccuracy of the linear models and reduces the time consuming to simulate. The algebraic solution of wave excitation force for the axisymmetric and unaxisymmetric floating body is obtained and validated by the numerical simulation.
- (3)
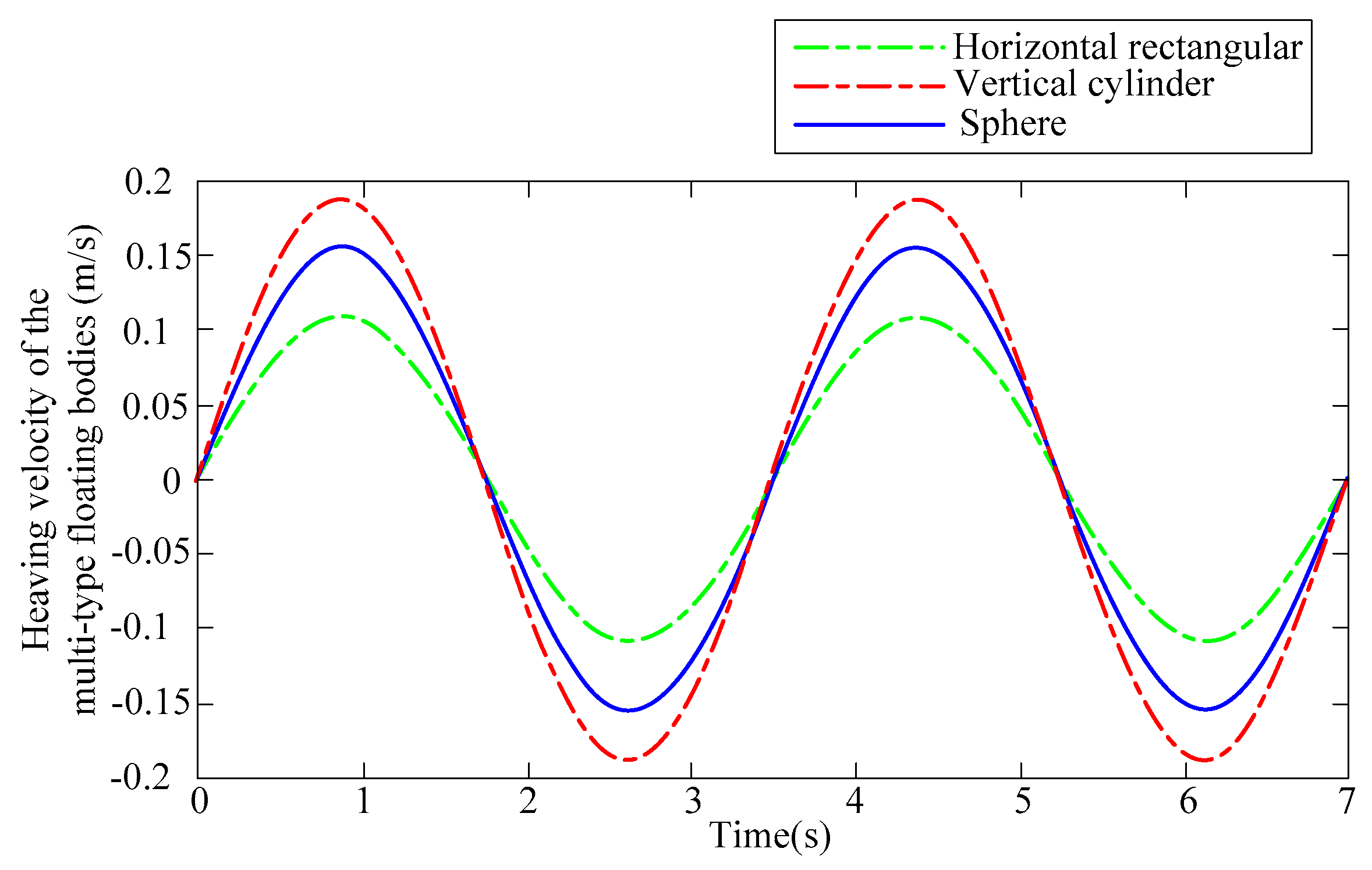
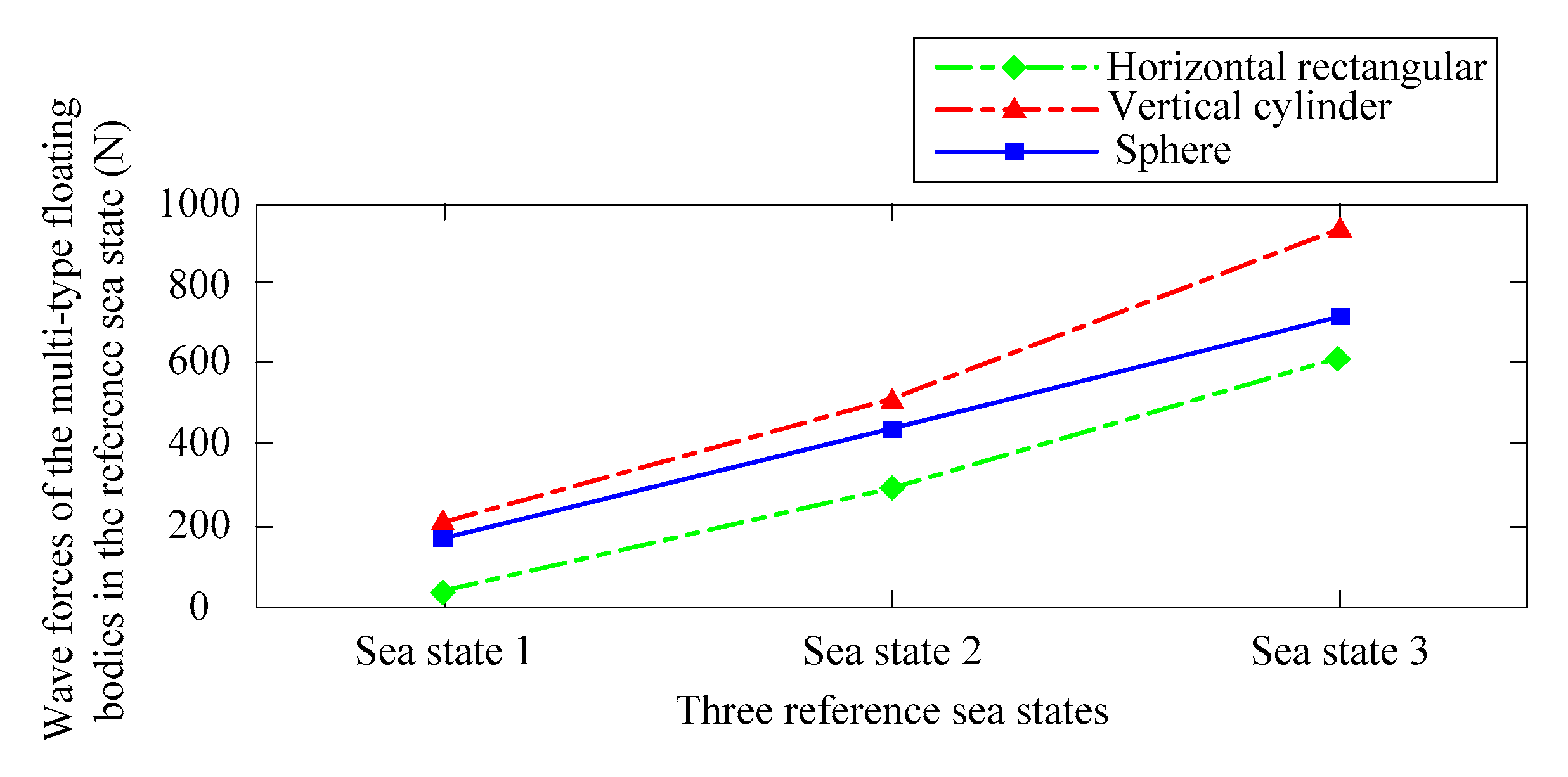
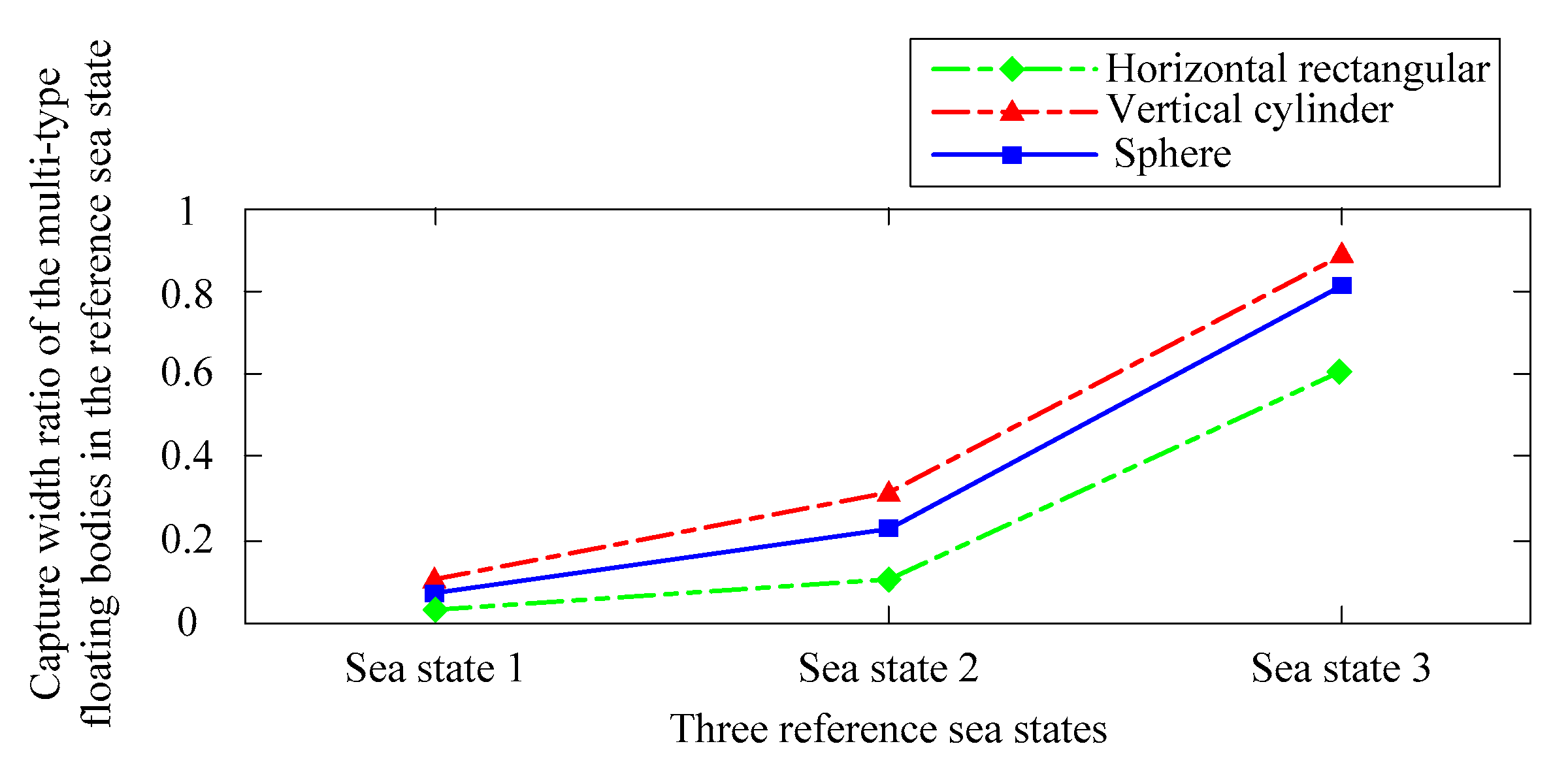
- The wave force, heaving velocity, heaving displacement, and capture width ratio of the three floating bodies are compared and analyzed by the numerical simulation. Under the same working condition, mass and mean immersion depth, the type of vertical cylindrical floater’s slopes of the wave force and the steeper amplitude, faster speed of heave motion, larger amplitude of heave motion, better follow wave, larger energy produced, as well as, higher conversion efficiency. Therefore, with the linear regular wave, the cylindrical floater vertically placed on the wave surface is the first optional shape for the novel heaving point absorber and follower is the sphere floater, which can increase the quality of power extracting and the efficient of the WEC system design.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| WEC | Wave energy converter |
| PTO | Power take-off |
| Heading wave width of the floating body (m) | |
| Underwater PTO damping coefficient (KNs/m) | |
| Underwater PTO damping coefficient in the vertical direction (KNs/m) | |
| Diffraction correction coefficient (-) | |
| Coefficient of wave diffraction in the vertical direction (-) | |
| Waterline depth of floating body (m) | |
| Water depth (m) | |
| Diffraction force (N) | |
| Radiation force (N) | |
| Static Froude-Krylov force (N) | |
| Dynamic Froude-Krylov force (N) | |
| Underwater PTO damping force (N) | |
| Wave force (N) | |
| Underwater PTO damping force in the vertical direction (N) | |
| Gravity force (N) | |
| Acceleration of gravity (m/s2) | |
| Wave height (m) | |
| Inertia force of attached mass effect (N) | |
| Wave Number (-) | |
| Mass of the heaving point absorber (kg) | |
| Vector normal to the surface (-) | |
| Projection of the normal for the wetted surface of the floating body in the vertical direction (-) | |
| Pressure (Pa) | |
| Hydrostatic pressure (Pa) | |
| Dynamic pressure (Pa) | |
| Average power of the floating body to harvests wave energy (Pa) | |
| Wave energy of the incident wave within the width of the body (Pa) | |
| Viscous damping force (N) | |
| Wave amplitude (m) | |
| Submerged surface (m2) | |
| Coordinate transformation matrix between local coordinate system and global coordinate system (-) | |
| Wave period (s) | |
| Velocity of the floating body (m/s) | |
| Coordinates of the center of gravity on the floating body in the global coordinate system | |
| Coordinates at any point on the floating body in the local coordinate system | |
| Vertical distance from the reference fluid surface to the body waterline (m) | |
| Direction of wave propagation in the global coordinate system (-) | |
| Direction of wave propagation in the local coordinate system (-) | |
| Heaving displacement of the body from its hydrostatic equilibrium position (m) | |
| Heaving velocity of the floating body (m/s) | |
| Heaving acceleration of the body (m/s2) | |
| Vertical distance from the reference fluid surface to the fluid surface (m) | |
| Vertical distance from the reference fluid surface to any point in the fluid (m) | |
| Vertical displacement of the floating body in the global coordinate system (m) | |
| Vertical displacement of the floating body in the local coordinate system (m) | |
| Wave angular frequency (rad/s) | |
| Potential flow | |
| Undisturbed incident flow potential | |
| Diffraction potential | |
| Radiation potential | |
| Water density (kg/m3) | |
| Wave circular frequency (rad/s) | |
| Capture width ratio (-) |
Appendix A
Appendix A.1. Horizontal Rectangular Floating Body
Appendix A.2. Vertical Cylinder Floating Body
Appendix A.3. Sphere Floating Body
References
- Bertaska, I.R.; Ellenrieder, K.D.V. Experimental evaluation of supervisory switching control for unmanned surface vehicles. IEEE J. Ocean. Eng. 2018, 99, 1–22. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.R.; Mohammadi-Aghdam, A.; Kiapei, A.; Salmani-Zakaria, Y.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an unmanned surface vehicle (USV) by algorithms fusion. Ocean Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Zoss, B.M.; Mateo, D.; Kuan, Y.K.; Tokić, G.; Chamanbaz, M.; Goh, L.; Vallegra, F.; Bouffanais, R.; Yue, D.K. Distributed system of autonomous buoys for scalable deployment and monitoring of large waterbodies. Auton. Robots 2018, 11, 1–21. [Google Scholar] [CrossRef]
- Banazadeh, A.; Seif, M.S.; Khodaei, M.J.; Rezaie, M. Identification of the equivalent linear dynamics and controller design for an unmanned underwater vehicle. Ocean Eng. 2017, 139, 152–168. [Google Scholar]
- Venkatesan, R.; Sannasiraj, S.A.; Ramanamurthy, M.V.; Senthilkumar, P.; Dhinesh, G. Development and performance validation of a cylindrical buoy for deep-ocean tsunami monitoring. IEEE J. Ocean. Eng. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Danovaro, R.; Aguzzi, J.; Fanelli, E.; Billett, D.; Gjerde, K.; Jamieson, A.; Ramirez-Llodra, E.; Smith, C.R.; Snelgrove, P.V.R.; Thomsen, L.; et al. An ecosystem-based deep-ocean strategy. Science 2017, 355, 452–454. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Luo, Z.; Shang, J.; Lu, Z.; Zhu, Y.; Wu, G. Design and Numerical Analysis of a Novel Counter-Rotating Self-Adaptable Wave Energy Converter Based on CFD Technology. Energies 2018, 11, 694. [Google Scholar] [CrossRef]
- Mendez, A.; Leo, T.J.; Herreros, M.A. Current state of technology of fuel cell power systems for autonomous underwater vehicles. Energies 2014, 7, 4676–4693. [Google Scholar] [CrossRef]
- Wang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar] [CrossRef]
- Dhanak, M.R.; Xiros, N.I. Handbook of Ocean Engineering; Springer: New York, NY, USA, 2016. [Google Scholar]
- Astariz, S.; Iglesias, G. The economics of wave energy: A review. Renew. Sustain. Energy Rev. 2015, 45, 397–408. [Google Scholar] [CrossRef]
- Cruz, J. Ocean Wave Energy; Springer: Berlin, Germany, 2008; Volume 144, pp. 2451–2460. [Google Scholar]
- Gunn, K.; Stock-Williams, C. Quantifying the global wave power resource. Renew. Energy 2012, 44, 296–304. [Google Scholar] [CrossRef]
- Saprykina, Y.; Kuznetsov, S. Analysis of the Variability of Wave Energy Due to Climate Changes on the Example of the Black Sea. Energies 2018, 11, 2020. [Google Scholar] [CrossRef]
- Clément, A.; McCullen, P.; Falcão, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S.; Pontes, M.-T.; et al. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Salter, S.H. Wave power. Nature 1974, 249, 720–724. [Google Scholar] [CrossRef]
- O’Hagan, A.M.; Huertas, C.; O’Callaghan, J.; Greaves, D. Wave energy in Europe: Views on experiences and progress to date. Int. J. Mar. Energy 2016, 14, 180–197. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. Estimation of the wave energy conversion efficiency in the Atlantic ocean close to the European islands. Renew. Energy 2016, 85, 687–703. [Google Scholar] [CrossRef]
- Kalogeri, C.; Galanis, G.; Spyrou, C.; Diamantis, D.; Baladima, F.; Koukoula, M.; Kallos, G. Assessing the European offshore wind and wave energy resource for combined exploitation. Renew. Energy 2017, 101, 244–264. [Google Scholar] [CrossRef]
- Stegman, A.; Andres, A.D.; Jeffrey, H.; Johanning, L.; Bradley, S. Exploring marine energy potential in the UK using a whole systems modeling approach. Energies 2017, 10, 1251. [Google Scholar] [CrossRef]
- Aderinto, T.; Li, H. Ocean wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Chen, B.; Bruce, T.; Greated, C.A.; Kang, H. Dynamic behavior of a wave power buoy with interior on-board linear generator. Ocean Eng. 2017, 129, 374–381. [Google Scholar] [CrossRef]
- Weber, J.; Costello, R.; Mouwen, F.; Ringwood, J.; Thomas, G. Techno-economic WEC system optimization methodology applied to Wavebob system definition. In Proceedings of the 3th International Conference on Ocean Energy, Bilbao, Spain, 6–8 October 2010; Volume 10, p. 6. [Google Scholar]
- Chatzigiannakou, M.A.; Dolguntseva, I.; Leijon, M. Offshore deployments of wave energy converters by Seabased industry AB. J. Mar. Sci. Eng. 2017, 5, 15. [Google Scholar] [CrossRef]
- Fred Olsen’s Lifesaver Buoy. Available online: http://boltseapower.com/company/ (accessed on 25 November 2018).
- Moskvitch, K. News briefing: In num6ers: CETO 6 Carnegie wave energy. Eng. Technol. 2016, 11, 12–13. [Google Scholar] [CrossRef]
- Black, J.L.; Mei, C.C.; Bray, C.G. Radiation and Scattering of Water Waves by Rigid Bodies. J. Fluid Mech. 1971, 46, 151–164. [Google Scholar] [CrossRef]
- Mohapatra, S.C.; Guedes Soares, C. Wave forces on a floating structure over flat bottom based on Boussinesq formulation. In Renewable Energies Offshore; Taylor & Francis Group: London, UK, 2015; pp. 335–342. [Google Scholar]
- Rodriguez, M.; Spinneken, J.; Swan, C. Nonlinear loading of a two-dimensional heaving box. J. Fluids Struct. 2016, 60, 80–96. [Google Scholar] [CrossRef] [Green Version]
- Islam, H.; Mohapatra, S.C.; Guedes, S.C. Comparisons of CFD, experimental and analytical simulations of a heaving box-type floating structure. In Progress in Maritime Technology and Engineering; Taylor & Francis Group: London, UK, 2018; Volume 5, pp. 633–639. [Google Scholar]
- Yeung, R.W. Added Mass and Damping of a Vertical Cylinder in Finite Depth Waters. Appl. Ocean Res. 1981, 3, 119–133. [Google Scholar] [CrossRef]
- Sabuncu, T.; Calisal, S. Hydrodynamic Coefficients for Vertical Circular Cylinder at Finite Depth. Ocean Eng. 1981, 8, 25–63. [Google Scholar] [CrossRef]
- Calisal, S.; Sabuncu, T. Hydrodynamic Coefficients for Vertical Composite Cylinders. Ocean Eng. 1984, 11, 529–542. [Google Scholar] [CrossRef]
- Mansour, A.M.; WiUliam, A.N.; Wang, K.H. The diffraction of linear waves by a uniform vertical cylinder with cosine-type radial perturbations. Type Radial Perturbations. Ocean Eng. 2002, 29, 239–259. [Google Scholar] [CrossRef]
- Bhatta, D.; Rahman, M. On Scattering and Radiation Problem for a Cylinder in Water of Finite Depth. Int. J. Eng. Sci. 2003, 41, 931–967. [Google Scholar] [CrossRef]
- Kim, W.D. On the Harmonic Oscillations of a Rigid Body on a Free Surface. J. Fluid Mech. 1965, 21, 427–451. [Google Scholar] [CrossRef]
- Bihs, H.; Kamata, A.; Lu, Z.J.; Arntsen, I.A. Simulation of Floating Bodies using a Combined Immersed Boundary with the Level Set Method in REEF3D. In Proceedings of the VII International Conference on Computational Methods in Marine Engineering, Nantes, Frances, 15–17 June 2017. [Google Scholar]
- Koh, H.J.; Cho, I.H. Heave motion response of a circular cylinder with the dual damping plates. Ocean Eng. 2016, 125, 95–102. [Google Scholar] [CrossRef]
- Wang, S. The Hydrodynamic Forces and Pressure Distributions for an Oscillating Sphere in a Fluid of Finite Depth; M.I.T. Department of Naval Architecture and Marine Engineering: Cambridge, MA, USA, 1966. [Google Scholar]
- Finnegan, W.; Meere, M.; Goggins, J. The wave excitation forces on a truncated vertical cylinder in water of infinite depth. J. Fluids Struct. 2013, 40, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Ghadimi, P.; Bandari, H.P.; Rostami, A.B. Determination of the Heave and Pitch Motions of a Floating Cylinder by of the Effects of Geometric Parameters on its Dynamics in Regular Waves. Int. J. Appl. Math. Res. 2012, 1, 611–633. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Computationally efficient nonlinear froude–krylov force calculations for heaving axisymmetric wave energy point absorbers. J. Ocean Eng. Mar. Energy 2017, 3, 21–33. [Google Scholar] [CrossRef]
- Merigaud, A.; Gilloteaux, J.C.; Ringwood, J.V. A Nonlinear Extension for Linear Boundary Element Methods in Wave Energy Device Modeling. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Penalba, M.; Mérigaud, A.; Gilloteaux, J.C.; Ringwood, J.V. Influence of nonlinear Froude Krylov forces on the performance of two wave energy points absorbers. J. Ocean Eng. Mar. Energy 2017, 3, 209–220. [Google Scholar] [CrossRef]
- Rodrigues, J.M.; Soares, C.G. Froude-krylov forces from exact pressure integrations on adaptive panel meshes in a time domain partially nonlinear model for ship motions. Ocean Eng. 2017, 139, 169–183. [Google Scholar] [CrossRef]
- Falnes, J.; Perlin, M. Ocean waves and oscillating systems: Linear interactions including wave-energy extraction. Appl. Mech. Rev. 2003, 56, 286. [Google Scholar] [CrossRef]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Clement, A.; Ferrant, P. Superharmonic Waves Generated by the Large Amplitude Heaving Motion of a Submerged Body. In Nonlinear Water Waves; Springer: Berlin/Heidelberg, Germany, 1988; pp. 423–433. [Google Scholar]
- Yu, H.; Zhang, Y.; Chen, W. Effect of Power Take-off System on the Capture Width Ratio of a Novel Wave Energy Converter. In Proceedings of the Asian Wave & Tidal Energy Conference, Singapore, 24–28 October 2016. [Google Scholar]
- Chen, T.X.; Wu, B.J.; Li, M. Flume experiment study on capture width ratio of a new backward bent duct buoy with a pentagon buoyancy cabin. Ocean Eng. 2017, 141, 12–17. [Google Scholar] [CrossRef]
- Herbich, J.B. Offshore Pipeline Design Elements; M. Dekker: New York, NY, USA, 1981. [Google Scholar]
- Standing, R.G. Use of potential theory in evaluating wave forces on offshore structures. In Power from Sea Waves, Conference Institute of Mathematics and its Applications; Academic Press: London, UK, 1980; Volume 1, pp. 175–212. [Google Scholar]
- Garrison, C.J.; Rao, V.S. Interaction of waves with submerged objects. J. Waterw. Harb. Coast. Eng Div. 1971, 97, 259–277. [Google Scholar]
- Korn, G.A.; Korn, T.M. Mathematical Handbook for Scientists and Engineers; McGraw-Hill: New York, NY, USA, 1968. [Google Scholar]
- Watson, G.N. Theory of Bessel Functions; Cambridge University Press: Cambridge, UK, 1962. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Geometry Shapes of Floating Bodies | The Coordinates of Floating Bodies | The Parameters of Profiles and Coordinates | The Wave Excitation Force in the Vertical Direction of Floating Bodies | |
|---|---|---|---|---|
| Unaxisy-mmetric | Horizontal rectangular |  | is the length, is the length along the wave direction, is the height, is the immer-sion depth in the time of . | (See Appendix A for calculation details.) |
| Axisym-metric | Vertical cylinder |  | is the radius, is the heig- ht, is the immersion de- pth in the time of , the cylin- der equation is ,the cylinder coordinate is , , , is wetted surface, , then, . | (See Appendix A for calculation details.) |
| Sphere |  | is the radius, is the immersion depth in the time of , the spherical equation is , the sphere- cal coordinate is ,, , is wetted surface, then, | (See Appendix A for calculation details.) | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, D.; Shang, J.; Luo, Z.; Sun, C.; Wu, W. Energy Efficiency Analysis of Multi-Type Floating Bodies for a Novel Heaving Point Absorber with Application to Low-Power Unmanned Ocean Device. Energies 2018, 11, 3282. https://doi.org/10.3390/en11123282
Cong D, Shang J, Luo Z, Sun C, Wu W. Energy Efficiency Analysis of Multi-Type Floating Bodies for a Novel Heaving Point Absorber with Application to Low-Power Unmanned Ocean Device. Energies. 2018; 11(12):3282. https://doi.org/10.3390/en11123282
Chicago/Turabian StyleCong, Dongsheng, Jianzhong Shang, Zirong Luo, Chongfei Sun, and Wei Wu. 2018. "Energy Efficiency Analysis of Multi-Type Floating Bodies for a Novel Heaving Point Absorber with Application to Low-Power Unmanned Ocean Device" Energies 11, no. 12: 3282. https://doi.org/10.3390/en11123282