

Trustworthy Localization in IoT Networks: A Survey of Localization Techniques, Threats, and Mitigation



Abstract
:1. Introduction
- C1: an innovative methodology that thoroughly reviews the existing literature on IoT localization, integrating techniques, and security considerations.
- C2: a classification of active radio-based localization techniques into range-based and range-free, with emphasis on understanding and comparing the different approaches while discussing their applicability to different use cases.
- C3: a mapping between each localization method and the corresponding threat models and proposed mitigation solutions documented in the literature.
- C4: guidelines to help researchers identify key references in the literature, serving as a valuable resource to facilitate the progress of their work in this specialized field.
2. Background
2.1. Methodological Approach
2.2. Review of Related Survey Works

| Areas of Interest | Year | Reference | Distinctive Characteristics |
|---|---|---|---|
| IoT localization techniques | 2018 | [9] | Compare and categorize existing works within an IoT infrastructure framework, and offer a comprehensive taxonomy. |
| 2019 | [10] | Evaluate different proposed systems through key IoT requirements | |
| [11] | Investigate the impact of localization in the modern IoT and the main challenges | ||
| [14] | Focus on MDS-based localization techniques for several scenarios | ||
| 2020 | [13] | Overview of error sources and mitigation, performance evaluation, and an analysis of the applications, opportunities, and challenges. | |
| [17] | Focus on ML and intelligent algorithms for Fingerprint-Based techniques | ||
| [19] | Overview of promising techniques based on visible light | ||
| [15] | RF-based localization in Smart Cities scenarios | ||
| 2021 | [16] | GNSS-free outdoor localization techniques | |
| [12] | Comparative analysis based on different performance parameters | ||
| [18] | ML-based Wi-Fi RSS fingerprinting schemes and investigation of training datasets in the literature | ||
| 2022 | [20] | In-depth analysis of LBSs, latest applications, and major vendor profiles | |
| [21] | Focus on the strengths and weaknesses inherent in each localization technology and technique | ||
| Threats models and solutions | 2017 | [22] | Security and privacy for LBS from a technical and legal perspective |
| 2020 | [23] | Advances in location privacy protection technology in the context of SIoV | |
| 2022 | [24] | Privacy attacks in location and corresponding solutions, with a focus on VANETs | |
| Joint analysis | Our survey aims to cover this gap in the literature by presenting a joint analysis of IoT localization techniques, threats models, and solutions | ||
- A comprehensive review of the main IoT localization techniques and algorithms found in the literature;
- An in-depth investigation of hybrid solutions, an emerging approach that has not been comprehensively explored in existing literature surveys;
- An analysis of associated security threats, along with potential solutions proposed in the literature for each category.
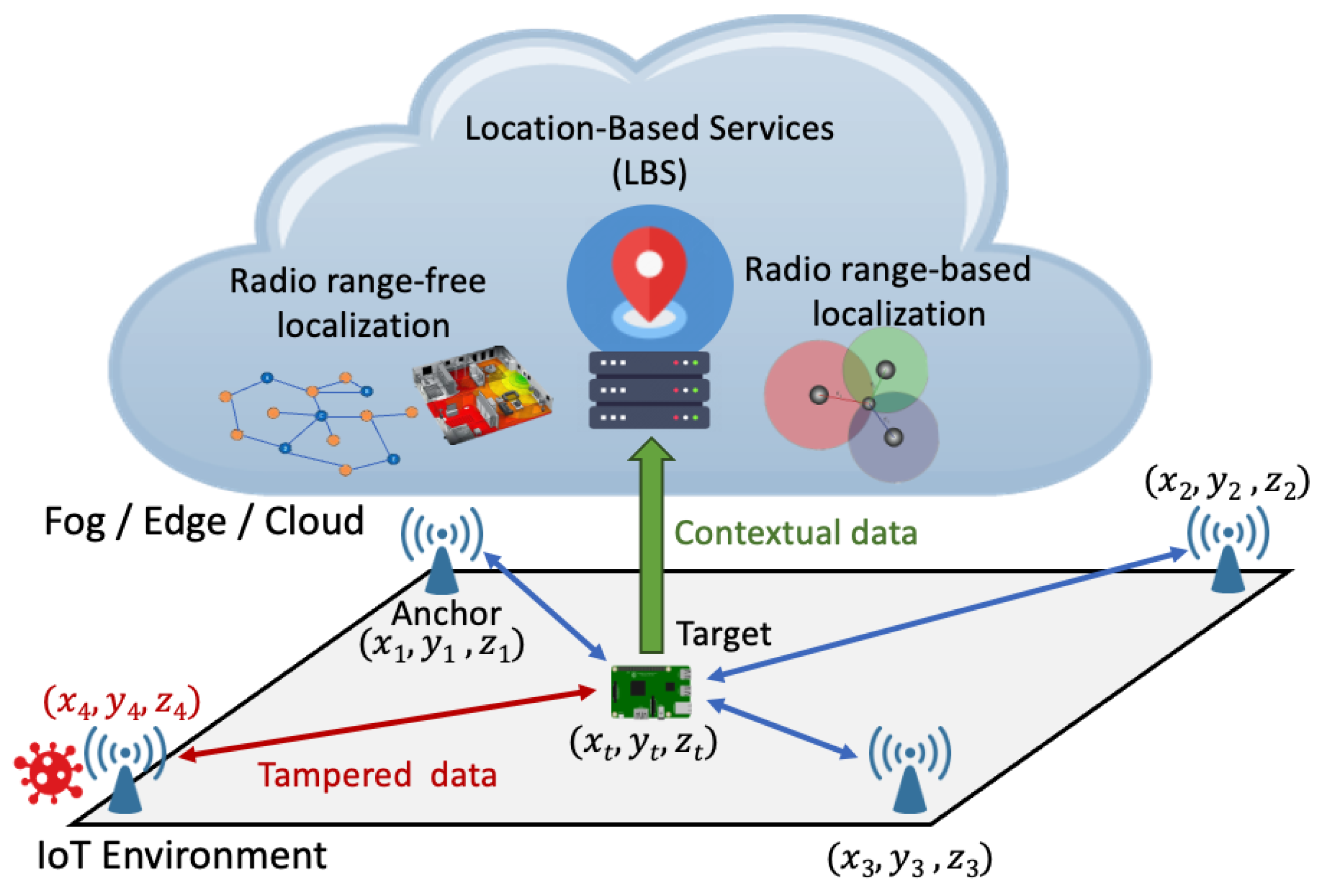
2.3. Reference Scenario
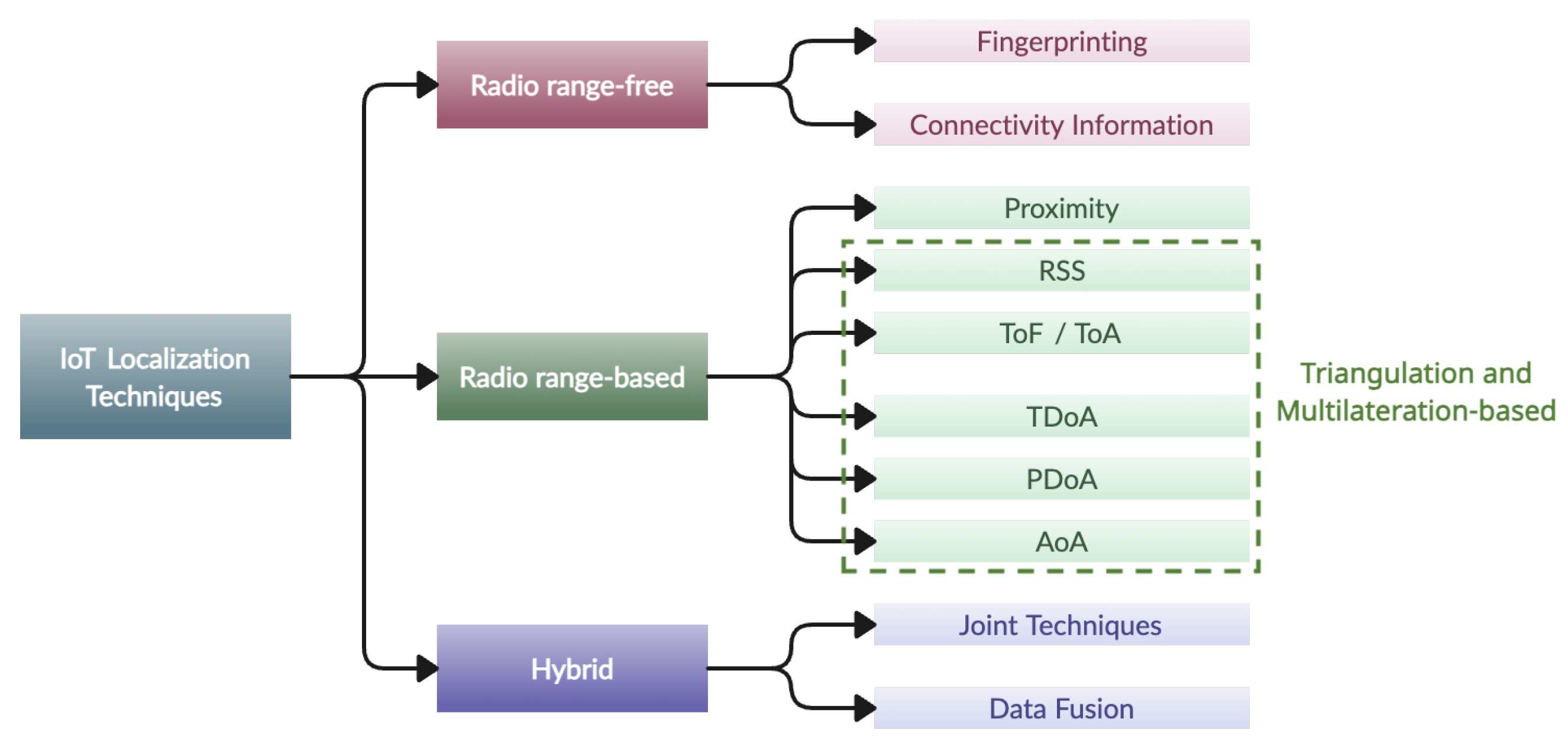
3. IoT Localization Techniques
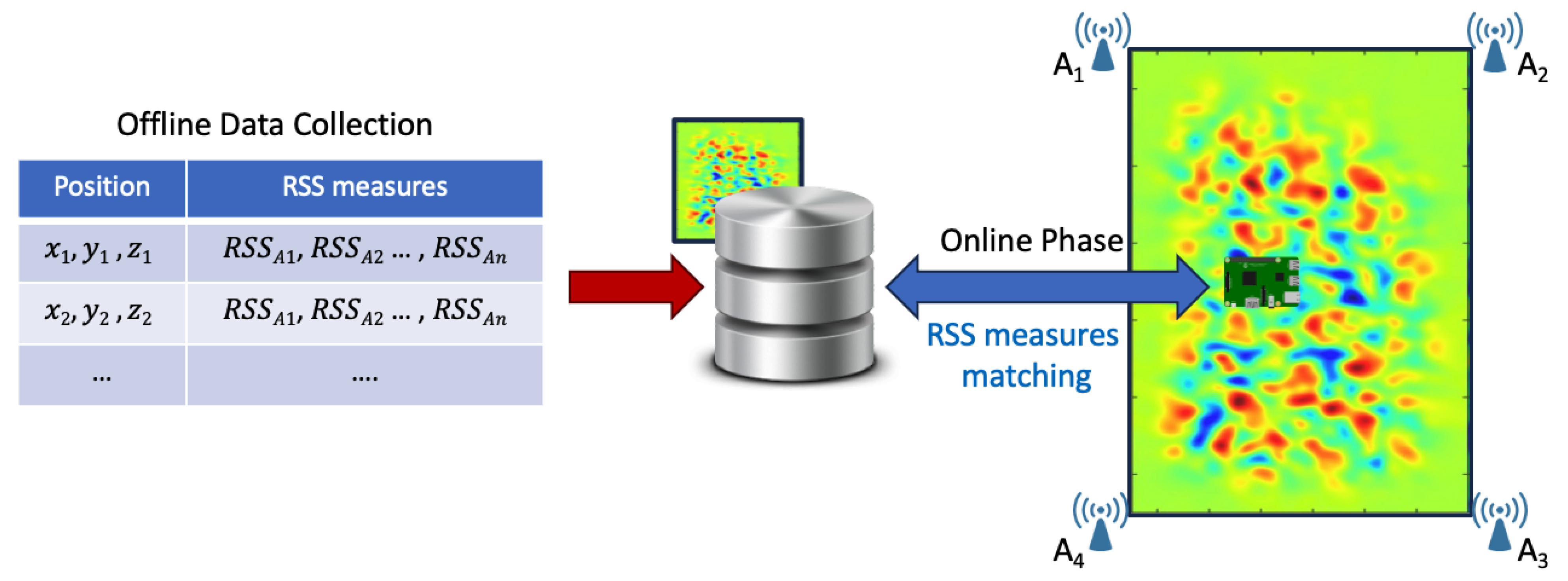
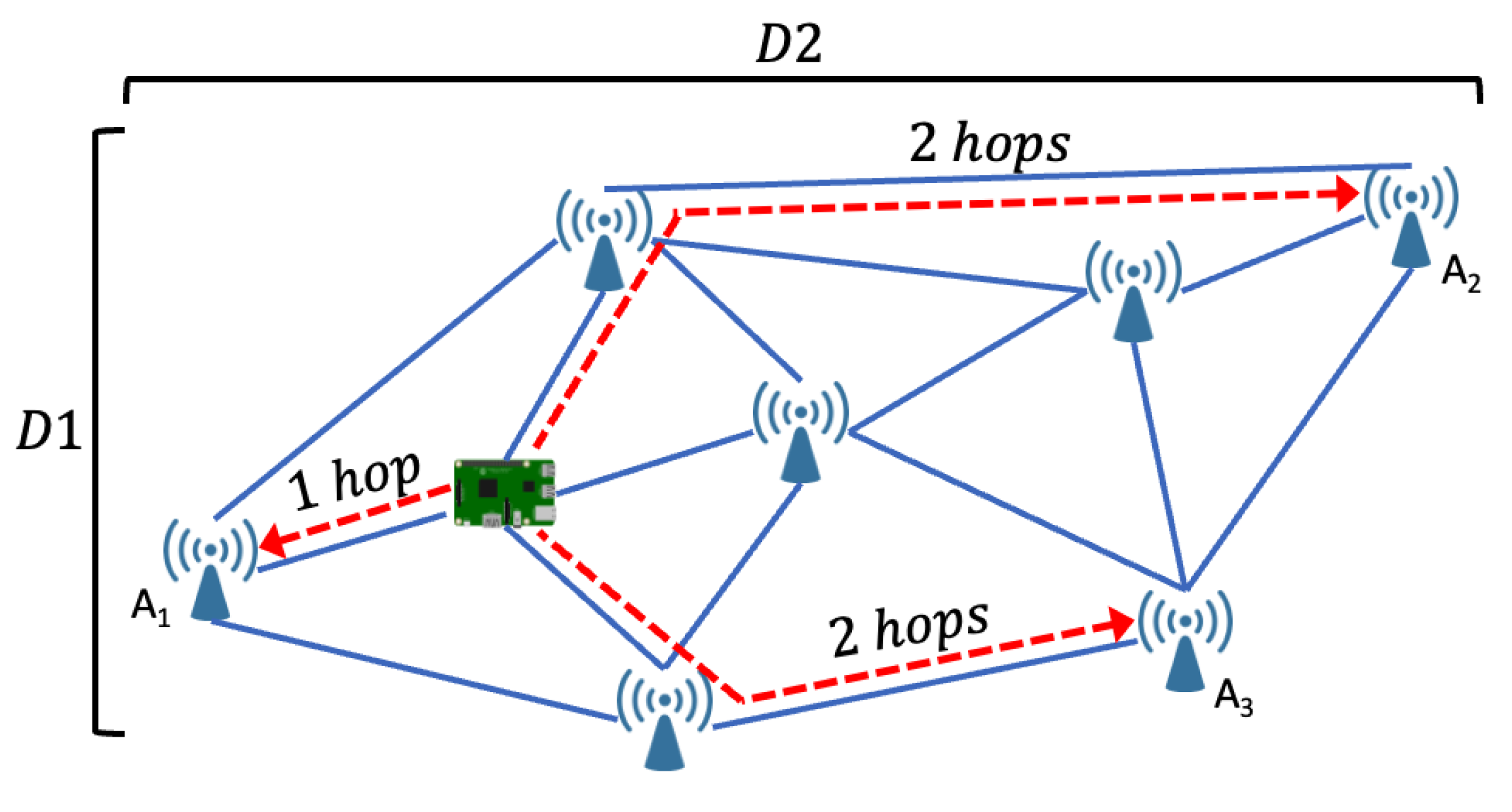
3.1. Radio Range-Free
3.2. Radio Range-Based
3.3. Hybrid Solutions
3.4. Comparative Analysis of Techniques
4. Threats Models, Detection and Mitigation
4.1. Availability
4.2. Authenticity
| Threat Model | Year | Reference | Proposed Solutions in the Field of | ||
|---|---|---|---|---|---|
| Radio Range-Based | Fingerprinting | Connectivity Info. | |||
| DoS | 2021 | [108] | X | X | X |
| 2023 | [126] | X | |||
| Spoofing | 2019 | [110] | X | ||
| [124] | X | X | X | ||
| 2021 | [111] | X | |||
| 2023 | [126] | X | |||
| [125] | X | ||||
| Sybil | 2019 | [124] | X | X | X |
| 2020 | [113] | X | |||
| [128] | X | ||||
| 2023 | [114] | X | |||
| [126] | X | ||||
| [127] | X | ||||
| [125] | X | ||||
| Byzantine | 2019 | [124] | X | X | X |
| 2021 | [116] | X | |||
| [118] | X | ||||
| [119] | X | X | |||
| [117] | X | ||||
| 2023 | [126] | X | |||
| Wormhole | 2019 | [124] | X | X | X |
| 2020 | [128] | X | |||
| 2022 | [121] | X | |||
| 2023 | [122] | X | |||
| [123] | X | ||||
| [126] | X | ||||
| [127] | X | ||||
5. Summary and Guidelines
- A substantial majority of articles employ radio range-based methods.
- There is growing interest in hybrid approaches that jointly exploit different techniques and use the fusion of data from different technologies to improve localization performance.
- Radio range-based techniques typically adopt a dual approach involving both experimental tests and simulations.
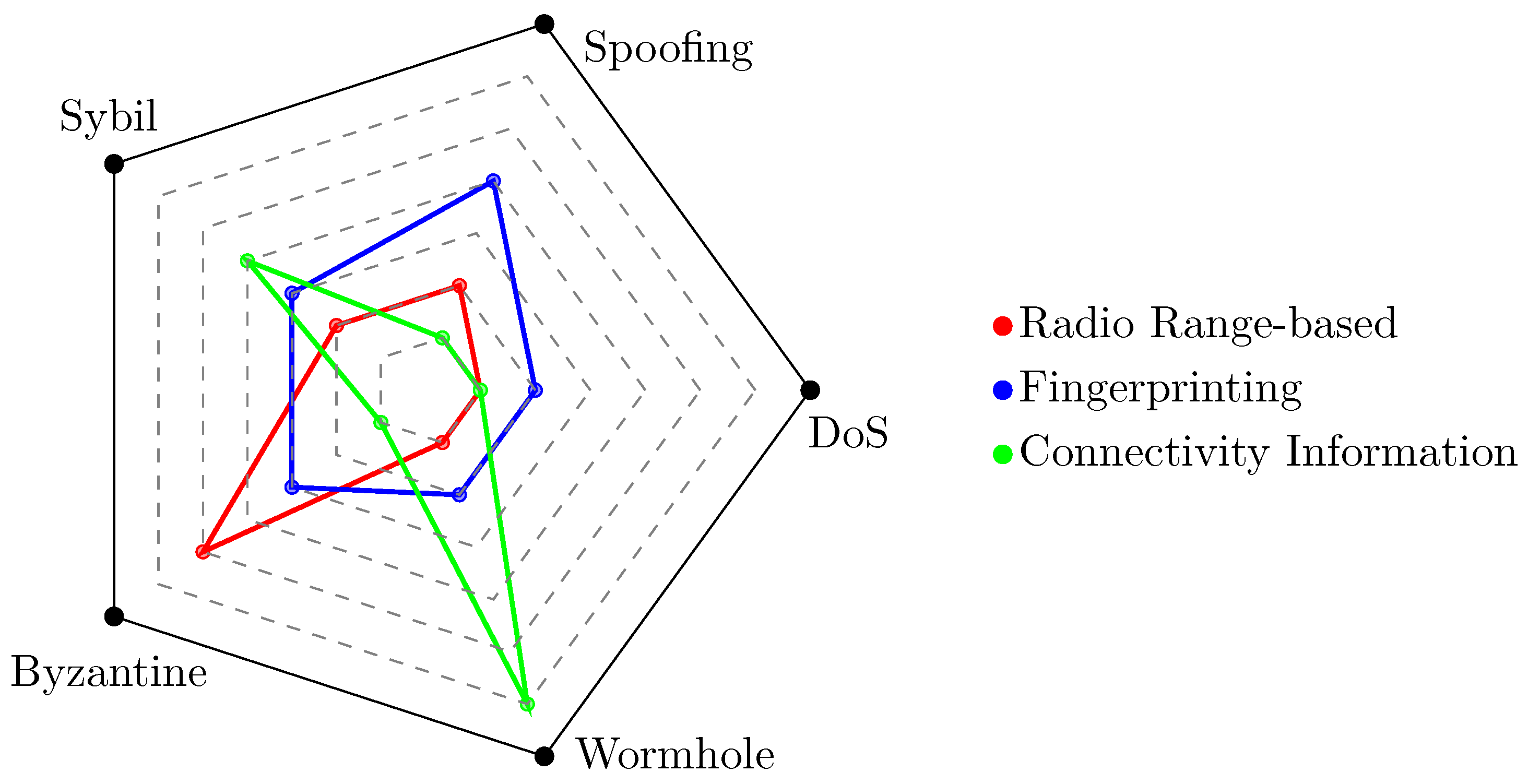
- Researchers are increasingly focused on security aspects. Works addressing these issues address specific threats related to particular localization techniques.
- Range-based approaches are susceptible to Byzantine attacks, connectivity information-based methods are vulnerable to Wormhole and Sybil attacks, and fingerprinting encounters a variety of challenges.
6. Conclusions and Future Directions
Author Contributions
Funding
Conflicts of Interest
References
- Vailshery, L.S. Number of Internet of Things (IoT) Connected Devices Worldwide from 2019 to 2030, by Vertical. Available online: https://www.statista.com/statistics/1194682/iot-connected-devices-vertically/ (accessed on 27 March 2024).
- Kumar, N.V.R.; Praveen, B.S.B.; Reddy, A.V.S.; Sam, B.B. Study on IOT with reference of M2M and WiFi. In Proceedings of the 2017 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 23–24 February 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Abowd, G.D.; Dey, A.K.; Brown, P.J.; Davies, N.; Smith, M.; Steggles, P. Towards a Better Understanding of Context and Context-Awareness. In Proceedings of the Handheld and Ubiquitous Computing, Karlsruhe, Germany, 27–29 September 1999; Gellersen, H.W., Ed.; Springer: Berlin/Heidelberg, Germany, 1999; pp. 304–307. [Google Scholar]
- Karimi, H.A. Telegeoinformatics: Location-Based Computing and Services; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar] [CrossRef]
- Martinelli, F. A Robot Localization System Combining RSSI and Phase Shift in UHF-RFID Signals. IEEE Trans. Control Syst. Technol. 2015, 23, 1782–1796. [Google Scholar] [CrossRef]
- van’t Riet, J.; Hühn, A.; Ketelaar, P.; Khan, V.J.; Konig, R.; Rozendaal, E.; Markopoulos, P. Investigating the Effects of Location-Based Advertising in the Supermarket: Does Goal Congruence Trump Location Congruence? J. Interact. Advert. 2016, 16, 31–43. [Google Scholar] [CrossRef]
- Tabbakha, N.E.; Tan, W.H.; Ooi, C.P. Indoor location and motion tracking system for elderly assisted living home. In Proceedings of the 2017 International Conference on Robotics, Automation and Sciences (ICORAS), Melaka, Malaysia, 27–29 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Liang, X.; Kim, Y. A Survey on Security Attacks and Solutions in the IoT Network. In Proceedings of the 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), Virtual, 27–30 January 2021; pp. 853–859. [Google Scholar] [CrossRef]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutorials 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutorials 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A Survey of Localization Systems in Internet of Things. Mob. Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Ghorpade, S.; Zennaro, M.; Chaudhari, B. Survey of Localization for Internet of Things Nodes: Approaches, Challenges and Open Issues. Future Internet 2021, 13, 210. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Toward Location-Enabled IoT (LE-IoT): IoT Positioning Techniques, Error Sources, and Error Mitigation. IEEE Internet Things J. 2021, 8, 4035–4062. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.S. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutorials 2019, 21, 3565–3583. [Google Scholar] [CrossRef]
- Ulusar, U.D.; Celik, G.; Al-Turjman, F. Cognitive RF-based localization for mission-critical applications in smart cities: An overview. Comput. Electr. Eng. 2020, 87, 106780. [Google Scholar] [CrossRef]
- Moradbeikie, A.; Keshavarz, A.; Rostami, H.; Paiva, S.; Lopes, S.I. GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review. Appl. Sci. 2021, 11, 10793. [Google Scholar] [CrossRef]
- Zhu, X.; Qu, W.; Qiu, T.; Zhao, L.; Atiquzzaman, M.; Wu, D.O. Indoor Intelligent Fingerprint-Based Localization: Principles, Approaches and Challenges. IEEE Commun. Surv. Tutorials 2020, 22, 2634–2657. [Google Scholar] [CrossRef]
- Singh, N.; Choe, S.; Punmiya, R. Machine Learning Based Indoor Localization Using Wi-Fi RSSI Fingerprints: An Overview. IEEE Access 2021, 9, 127150–127174. [Google Scholar] [CrossRef]
- Rahman, A.B.M.M.; Li, T.; Wang, Y. Recent Advances in Indoor Localization via Visible Lights: A Survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Asaad, S.M.; Maghdid, H.S. A Comprehensive Review of Indoor/Outdoor Localization Solutions in IoT era: Research Challenges and Future Perspectives. Comput. Netw. 2022, 212, 109041. [Google Scholar] [CrossRef]
- Chen, L.; Thombre, S.; Järvinen, K.; Lohan, E.S.; Alén-Savikko, A.; Leppäkoski, H.; Bhuiyan, M.Z.H.; Bu-Pasha, S.; Ferrara, G.N.; Honkala, S.; et al. Robustness, Security and Privacy in Location-Based Services for Future IoT: A Survey. IEEE Access 2017, 5, 8956–8977. [Google Scholar] [CrossRef]
- Jia, X.; Xing, L.; Gao, J.; Wu, H. A Survey of Location Privacy Preservation in Social Internet of Vehicles. IEEE Access 2020, 8, 201966–201984. [Google Scholar] [CrossRef]
- Ahmed, N.; Deng, Z.; Memon, I.; Hassan, F.; Mohammadani, K.H.; Iqbal, R.; Bashir, A.K. A Survey on Location Privacy Attacks and Prevention Deployed with IoT in Vehicular Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 6503299. [Google Scholar] [CrossRef]
- Zhao, L.; Su, C.; Huang, H.; Han, Z.; Ding, S.; Li, X. Intrusion Detection Based on Device-Free Localization in the Era of IoT. Symmetry 2019, 11, 630. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A Survey on Mobile Anchor Node Assisted Localization in Wireless Sensor Networks. IEEE Commun. Surv. Tutorials 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Singh, S.P.; Sharma, S. Range Free Localization Techniques in Wireless Sensor Networks: A Review. Procedia Comput. Sci. 2015, 57, 7–16. [Google Scholar] [CrossRef]
- Wang, H.; Gao, Z.; Guo, Y.; Huang, Y. A survey of range-based localization algorithms for cognitive radio networks. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; pp. 844–847. [Google Scholar] [CrossRef]
- Shakshuki, E.; Elkhail, A.A.; Nemer, I.; Adam, M.; Sheltami, T. Comparative Study on Range Free Localization Algorithms. Procedia Comput. Sci. 2019, 151, 501–510. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Chen, R.; Liu, M.; Hui, Y.; Cheng, N.; Li, J. Reconfigurable Intelligent Surfaces for 6G IoT Wireless Positioning: A Contemporary Survey. IEEE Internet Things J. 2022, 9, 23570–23582. [Google Scholar] [CrossRef]
- Lu, Z.; Zhao, Y.; Li, X.; Xu, C.Z. Randomized Passive Energy Beamforming for Cooperative Localization in Reconfigurable Intelligent Surface Assisted Wireless Backscattered Sensor Network. IEEE Internet Things J. 2024, 11, 9693–9707. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless indoor localization without site survey. In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 64–72. [Google Scholar] [CrossRef]
- Ali, M.; Hur, S.; Park, Y. Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors. Sensors 2019, 19, 1496. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Li, K.; Zhang, X. Wi-Fi Fingerprint-Based Indoor Localization Method via Standard Particle Swarm Optimization. Sensors 2022, 22, 5051. [Google Scholar] [CrossRef] [PubMed]
- Ye, Q.; Bie, H.; Li, K.C.; Fan, X.; Gong, L.; He, X.; Fang, G. EdgeLoc: A Robust and Real-Time Localization System Toward Heterogeneous IoT Devices. IEEE Internet Things J. 2022, 9, 3865–3876. [Google Scholar] [CrossRef]
- El Boudani, B.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing Deep Learning Techniques in 5G IoT Networks for 3D Indoor Positioning: DELTA (DeEp Learning-Based Co-operaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef] [PubMed]
- Purohit, J.; Wang, X.; Mao, S.; Sun, X.; Yang, C. Fingerprinting-based Indoor and Outdoor Localization with LoRa and Deep Learning. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Jia, B.; Qiao, W.; Zong, Z.; Liu, S.; Hijji, M.; Del Ser, J.; Muhammad, K. A fingerprint-based localization algorithm based on LSTM and data expansion method for sparse samples. Future Gener. Comput. Syst. 2022, 137, 380–393. [Google Scholar] [CrossRef]
- Ghribi, H.; Khelifa, F.; Jemai, A.; Bassem Ben Salah, M. A Review of DV-Hop localization algorithm. In Proceedings of the 2021 31st International Telecommunication Networks and Applications Conference (ITNAC), Sydney, Australia, 24–26 November 2021; pp. 121–126. [Google Scholar] [CrossRef]
- Prashar, D.; Jyoti, K. Distance Error Correction Based Hop Localization Algorithm for Wireless Sensor Network. Wirel. Pers. Commun. 2019, 106, 1465–1488. [Google Scholar] [CrossRef]
- Goyat, R.; Rai, M.K.; Kumar, G.; Saha, R.; Kim, T.H. Energy Efficient Range-Free Localization Algorithm for Wireless Sensor Networks. Sensors 2019, 19, 3603. [Google Scholar] [CrossRef] [PubMed]
- Hadir, A.; Regragui, Y.; Garcia, N.M. Accurate Range-Free Localization Algorithms Based on PSO for Wireless Sensor Networks. IEEE Access 2021, 9, 149906–149924. [Google Scholar] [CrossRef]
- Hadir, A.; Kaabouch, N.; El Houssaini, M.A.; El Kafi, J. Range-Free Localization Approaches Based on Intelligent Swarm Optimization for Internet of Things. Information 2023, 14, 592. [Google Scholar] [CrossRef]
- Gui, L.; Xiao, F.; Zhou, Y.; Shu, F.; Val, T. Connectivity Based DV-Hop Localization for Internet of Things. IEEE Trans. Veh. Technol. 2020, 69, 8949–8958. [Google Scholar] [CrossRef]
- Turgut, Z.; Aydin, G.Z.G.; Sertbas, A. Indoor Localization Techniques for Smart Building Environment. Procedia Comput. Sci. 2016, 83, 1176–1181. [Google Scholar] [CrossRef]
- Mackey, A.; Spachos, P. Energy Consumption and Proximity Accuracy of BLE Beacons for Internet of Things Applications. In Proceedings of the 2018 Global Information Infrastructure and Networking Symposium (GIIS), Thessaloniki, Greece, 23–25 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef]
- Aernouts, M.; Bellekens, B.; Berkvens, R.; Weyn, M. A Comparison of Signal Strength Localization Methods with Sigfox. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Janssen, T.; Berkvens, R.; Weyn, M. RSS-Based Localization and Mobility Evaluation Using a Single NB-IoT Cell. Sensors 2020, 20, 6172. [Google Scholar] [CrossRef] [PubMed]
- Jamâa, M.B.; Koubâa, A.; Kayani, Y. EasyLoc: RSS-Based Localization Made Easy. Procedia Comput. Sci. 2012, 10, 1127–1133. [Google Scholar] [CrossRef]
- Achroufene, A.; Amirat, Y.; Chibani, A. RSS-Based Indoor Localization Using Belief Function Theory. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1163–1180. [Google Scholar] [CrossRef]
- Du, J.; Yuan, C.; Yue, M.; Ma, T. A Novel Localization Algorithm Based on RSSI and Multilateration for Indoor Environments. Electronics 2022, 11, 289. [Google Scholar] [CrossRef]
- Carpi, F.; Martalò, M.; Davoli, L.; Cilfone, A.; Yu, Y.; Wang, Y.; Ferrari, G. Experimental analysis of RSSI-based localization algorithms with NLOS pre-mitigation for IoT applications. Comput. Netw. 2023, 225, 109663. [Google Scholar] [CrossRef]
- Kwasme, H.; Ekin, S. RSSI-Based Localization Using LoRaWAN Technology. IEEE Access 2019, 7, 99856–99866. [Google Scholar] [CrossRef]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. RSSI-Based LoRa Localization Systems for Large-Scale Indoor and Outdoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Qiao, G.; Muhammad, A.; Muzzammil, M.; Shoaib Khan, M.; Tariq, M.O.; Khan, M.S. Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication. J. Mar. Sci. Eng. 2022, 10, 530. [Google Scholar] [CrossRef]
- Wang, T.; Ding, H.; Xiong, H.; Zheng, L. A Compensated Multi-Anchors TOF-Based Localization Algorithm for Asynchronous Wireless Sensor Networks. IEEE Access 2019, 7, 64162–64176. [Google Scholar] [CrossRef]
- Comuniello, A.; De Angelis, A.; Moschitta, A.; Carbone, P. Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning. Electronics 2021, 11, 111. [Google Scholar] [CrossRef]
- Beuchat, P.N.; Hesse, H.; Domahidi, A.; Lygeros, J. Enabling Optimization-Based Localization for IoT Devices. IEEE Internet Things J. 2019, 6, 5639–5650. [Google Scholar] [CrossRef]
- Han, T.; Lu, X.; Lan, Q. Pattern recognition based Kalman filter for indoor localization using TDOA algorithm. Appl. Math. Model. 2010, 34, 2893–2900. [Google Scholar] [CrossRef]
- Wang, G.; Zhu, W.; Ansari, N. Robust TDOA-Based Localization for IoT via Joint Source Position and NLOS Error Estimation. IEEE Internet Things J. 2019, 6, 8529–8541. [Google Scholar] [CrossRef]
- Zhao, W.; Duan, X.; Tian, D.; Zhou, J.; Xia, S.; Sun, Y.; Wu, Y.; Ran, X. An SDP-based TDOA Localization Method for Wireless Sensor Networks. In Proceedings of the 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 14–17 October 2021; pp. 381–386. [Google Scholar] [CrossRef]
- Neunteufel, D.; Grebien, S.; Arthaber, H. Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment. Sensors 2022, 22, 2663. [Google Scholar] [CrossRef]
- Martalò, M.; Perri, S.; Verdano, G.; De Mola, F.; Monica, F.; Ferrari, G. Improved UWB TDoA-Based Positioning Using a Single Hotspot for Industrial IoT Applications. IEEE Trans. Ind. Inform. 2022, 18, 3915–3925. [Google Scholar] [CrossRef]
- Martalò, M.; Perri, S.; Verdano, G.; De Mola, F.; Monica, F.; Ferrari, G. Hybrid UWB-Inertial TDoA-Based Target Tracking with Concentrated Anchors. IEEE Internet Things J. 2023, 10, 12676–12689. [Google Scholar] [CrossRef]
- Bouras, C.; Gkamas, A.; Kokkinos, V.; Papachristos, N. Time Difference of Arrival Localization Study for SAR Systems over LoRaWAN. Procedia Comput. Sci. 2020, 175, 292–299. [Google Scholar] [CrossRef]
- Pospisil, J.; Fujdiak, R.; Mikhaylov, K. Investigation of the Performance of TDoA-Based Localization Over LoRaWAN in Theory and Practice. Sensors 2020, 20, 5464. [Google Scholar] [CrossRef]
- Naz, A.; Asif, H.M.; Umer, T.; Kim, B.S. PDOA Based Indoor Positioning Using Visible Light Communication. IEEE Access 2018, 6, 7557–7564. [Google Scholar] [CrossRef]
- Qi, C.; Amato, F.; Alhassoun, M.; Durgin, G.D. Breaking the Range Limit of RFID Localization: Phase-based Positioning with Tunneling Tags. In Proceedings of the 2019 IEEE International Conference on RFID (RFID), Phoenix, AZ, USA, 2–4 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Wolf, F.; Berg, V.; Dehmas, F.; Mannoni, V.; De Rivaz, S. Multi-Frequency Phase Difference of Arrival for Precise Localization in Narrowband LPWA Networks. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, X.; Liu, K.; Zhang, S. Localization and Tracking of an Indoor Autonomous Vehicle Based on the Phase Difference of Passive UHF RFID Signals. Sensors 2021, 21, 3286. [Google Scholar] [CrossRef]
- Zhang, Y.; Duan, L. Toward Elderly Care: A Phase-Difference-of-Arrival Assisted Ultra-Wideband Positioning Method in Smart Home. IEEE Access 2020, 8, 139387–139395. [Google Scholar] [CrossRef]
- Wielandt, S.; Strycker, L. Indoor Multipath Assisted Angle of Arrival Localization. Sensors 2017, 17, 2522. [Google Scholar] [CrossRef]
- Monfared, S.; Delepaut, A.; Van Eeckhaute, M.; De Doncker, P.; Horlin, F. Iterative Localization Method Using AoA for IoT Sensor Networks. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- HajiAkhondi-Meybodi, Z.; Salimibeni, M.; Mohammadi, A.; Plataniotis, K.N. Bluetooth Low Energy and CNN-Based Angle of Arrival Localization in Presence of Rayleigh Fading. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 7913–7917. [Google Scholar] [CrossRef]
- Tai, T.C.; Lin, K.C.J.; Tseng, Y.C. Toward Reliable Localization by Unequal AoA Tracking. In Proceedings of the 17th Annual International Conference on Mobile Systems, Applications, and Services, Seoul, Republic of Korea, 17–21 June 2019; MobiSys ’19. pp. 444–456. [Google Scholar] [CrossRef]
- Heydariaan, M.; Dabirian, H.; Gnawali, O. AnguLoc: Concurrent Angle of Arrival Estimation for Indoor Localization with UWB Radios. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 112–119. [Google Scholar] [CrossRef]
- Hajiakhondi-Meybodi, Z.; Salimibeni, M.; Plataniotis, K.N.; Mohammadi, A. Bluetooth Low Energy-based Angle of Arrival Estimation via Switch Antenna Array for Indoor Localization. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zandamela, A.; Chiumento, A.; Marchetti, N.; Narbudowicz, A. Angle of Arrival Estimation via Small IoT Devices: Miniaturized Arrays vs. MIMO Antennas. IEEE Internet Things Mag. 2022, 5, 146–152. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- L. N. Nguyen, T.; D. Vy, T.; Shin, Y. An Efficient Hybrid RSS-AoA Localization for 3D Wireless Sensor Networks. Sensors 2019, 19, 2121. [Google Scholar] [CrossRef]
- Li, X.; Leitinger, E.; Tufvesson, F. RSS-Based Localization of Low-Power IoT Devices Exploiting AoA and Range Information. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–4 November 2020; pp. 651–656. [Google Scholar] [CrossRef]
- Wang, T.; Xiong, H.; Ding, H.; Zheng, L. A Hybrid Localization Algorithm Based on TOF and TDOA for Asynchronous Wireless Sensor Networks. IEEE Access 2019, 7, 158981–158988. [Google Scholar] [CrossRef]
- Chen, H.; Ballal, T.; Saeed, N.; Alouini, M.S.; Al-Naffouri, T.Y. A Joint TDOA-PDOA Localization Approach Using Particle Swarm Optimization. IEEE Wirel. Commun. Lett. 2020, 9, 1240–1244. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Indoor Localization System Based on Hybrid Wi-Fi/BLE and Hierarchical Topological Fingerprinting Approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806. [Google Scholar] [CrossRef]
- Pettorru, G.; Pilloni, V.; Martalò, M. A Hybrid WiFi/Bluetooth RSS Dataset with Application to Multilateration-Based Localization. In Proceedings of the 2023 IEEE International Mediterranean Conference on Communications and Networking (MeditCom), Dubrovnik, Croatia, 4–7 September 2023; pp. 293–298. [Google Scholar] [CrossRef]
- Monica, S.; Bergenti, F. Hybrid Indoor Localization Using WiFi and UWB Technologies. Electronics 2019, 8, 334. [Google Scholar] [CrossRef]
- Kia, G.; Ruotsalainen, L.; Talvitie, J. Toward Accurate Indoor Positioning: An RSS-Based Fusion of UWB and Machine-Learning-Enhanced WiFi. Sensors 2022, 22, 3204. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Ansari, N.; Li, L.; Duan, L. A Hybrid Positioning System for Location-Based Services: Design and Implementation. IEEE Commun. Mag. 2020, 58, 90–96. [Google Scholar] [CrossRef]
- Vo, Q.D.; De, P. A Survey of Fingerprint-Based Outdoor Localization. IEEE Commun. Surv. Tutorials 2016, 18, 491–506. [Google Scholar] [CrossRef]
- Bshara, M.; Orguner, U.; Gustafsson, F.; Van Biesen, L. Fingerprinting Localization in Wireless Networks Based on Received-Signal-Strength Measurements: A Case Study on WiMAX Networks. IEEE Trans. Veh. Technol. 2010, 59, 283–294. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, W.; Li, L.; Zhang, B.; Li, C. An Efficient and Robust Fingerprint-Based Localization Method for Multiflloor Indoor Environment. IEEE Internet Things J. 2024, 11, 3927–3941. [Google Scholar] [CrossRef]
- Kaur, A.; Gupta, G.P.; Mittal, S. Comparative Study of the Different Variants of the DV-Hop Based Node Localization Algorithms for Wireless Sensor Networks. Wirel. Pers. Commun. 2022, 123, 1625–1667. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Xiande, L. A Weighted DV-Hop Localization Scheme for Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Scalable Computing and Communications; Eighth International Conference on Embedded Computing, Dalian, China, 25–27 September 2009; pp. 269–272. [Google Scholar] [CrossRef]
- Spachos, P.; Papapanagiotou, I.; Plataniotis, K.N. Microlocation for Smart Buildings in the Era of the Internet of Things: A Survey of Technologies, Techniques, and Approaches. IEEE Signal Process. Mag. 2018, 35, 140–152. [Google Scholar] [CrossRef]
- Montanaro, T.; Sergi, I.; Shumba, A.T.; Pizzolante, M.; Pirozzi, M.; Patrono, L. BLE-based IoT Proximity Warning System for Guaranteeing the Operators’ Safety in Outdoor Working Environments. In Proceedings of the 2023 8th International Conference on Smart and Sustainable Technologies (SpliTech), Split/Bol, Croatia, 20–23 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Clougherty, H.; Brown, A.; Stonerock, M.; Trepte, M.; Whitesell, M.; Bailey, R. Home automation and personalization through individual location determination. In Proceedings of the 2017 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 28 April 2017; pp. 300–305. [Google Scholar] [CrossRef]
- Azmi, N.A.; Samsul, S.; Yamada, Y.; Mohd Yakub, M.F.; Mohd Ismail, M.I.; Dziyauddin, R.A. A Survey of Localization using RSSI and TDoA Techniques in Wireless Sensor Network: System Architecture. In Proceedings of the 2018 2nd International Conference on Telematics and Future Generation Networks (TAFGEN), Kuching, Malaysia, 24–26 July 2018; pp. 131–136. [Google Scholar] [CrossRef]
- Mittal, A.; Shrivastava, A. Detecting Continuous Jamming Attack using Ultra-low Power RSSI Circuit. In Proceedings of the 2022 IEEE International Symposium on Hardware Oriented Security and Trust (HOST), McLean, VA, USA, 27–30 June 2022; pp. 49–52. [Google Scholar] [CrossRef]
- Zahra, F.T.; Bostanci, Y.S.; Soyturk, M. The Consequences of Jamming Attacks on Wireless IoT Networks: Evaluating the Performance Metrics in Noiseless and Noisy Environments. In Proceedings of the 2023 31st Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkiye, 5–8 July 2023; pp. 1–4. [Google Scholar] [CrossRef]
- López-Vilos, N.; Valencia-Cordero, C.; Souza, R.D.; Montejo-Sánchez, S. Clustering-Based Energy-Efficient Self-Healing Strategy for WSNs Under Jamming Attacks. Sensors 2023, 23, 6894. [Google Scholar] [CrossRef] [PubMed]
- Ghahramani, M.; Javidan, R.; Shojafar, M.; Taheri, R.; Alazab, M.; Tafazolli, R. RSS: An Energy-Efficient Approach for Securing IoT Service Protocols Against the DoS Attack. IEEE Internet Things J. 2021, 8, 3619–3635. [Google Scholar] [CrossRef]
- Abdalzaher, M.S.; Elwekeil, M.; Wang, T.; Zhang, S. A Deep Autoencoder Trust Model for Mitigating Jamming Attack in IoT Assisted by Cognitive Radio. IEEE Syst. J. 2022, 16, 3635–3645. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Iudice, I.; Verde, F. Detection and Blind Channel Estimation for UAV-Aided Wireless Sensor Networks in Smart Cities Under Mobile Jamming Attack. IEEE Internet Things J. 2022, 9, 11932–11950. [Google Scholar] [CrossRef]
- Alikh, N.; Rajabzadeh, A. Using a lightweight security mechanism to detect and localize jamming attack in wireless sensor networks. Optik 2022, 271, 170099. [Google Scholar] [CrossRef]
- Sudha, I.; Mustafa, M.A.; Suguna, R.; Karupusamy, S.; Ammisetty, V.; Shavkatovich, S.N.; Ramalingam, M.; Kanani, P. Pulse jamming attack detection using swarm intelligence in wireless sensor networks. Optik 2023, 272, 170251. [Google Scholar] [CrossRef]
- Shi, L.; Liu, Q.; Shao, J.; Cheng, Y. Distributed Localization in Wireless Sensor Networks Under Denial-of-Service Attacks. IEEE Control Syst. Lett. 2021, 5, 493–498. [Google Scholar] [CrossRef]
- Douceur, J.R. The sybil attack. In Proceedings of the International Workshop on Peer-to-Peer Systems, Cambridge, MA, USA, 7–8 March 2002; pp. 251–260. [Google Scholar]
- Pestourie, B.; Beroulle, V.; Fourty, N. Security Evaluation with an Indoor UWB Localization Open Platform: Acknowledgment Attack Case Study. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Sun, X.; Ai, H.; Tao, J.; Hu, T.; Cheng, Y. BERT-ADLOC: A secure crowdsourced indoor localization system based on BLE fingerprints. Appl. Soft Comput. 2021, 104, 107237. [Google Scholar] [CrossRef]
- Bang, A.O.; Rao, U.P. A novel decentralized security architecture against sybil attack in RPL-based IoT networks: A focus on smart home use case. J. Supercomput. 2021, 77, 13703–13738. [Google Scholar] [CrossRef]
- Dong, S.; Zhang, X.G.; Zhou, W.G. A Security Localization Algorithm Based on DV-Hop Against Sybil Attack in Wireless Sensor Networks. J. Electr. Eng. Technol. 2020, 15, 919–926. [Google Scholar] [CrossRef]
- Yuan, Y.; Huang, Y.; Yuan, Y. PrSLoc: Sybil attack detection for localization with private observers using differential privacy. Comput. Secur. 2023, 131, 103289. [Google Scholar] [CrossRef]
- Rawat, A.S.; Anand, P.; Chen, H.; Varshney, P.K. Collaborative Spectrum Sensing in the Presence of Byzantine Attacks in Cognitive Radio Networks. IEEE Trans. Signal Process. 2011, 59, 774–786. [Google Scholar] [CrossRef]
- Mukhopadhyay, B.; Srirangarajan, S.; Kar, S. RSS-Based Localization in the Presence of Malicious Nodes in Sensor Networks. IEEE Trans. Instrum. Meas. 2021, 70, 5503716. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, J.; Liu, X.; Xie, Y.; Tang, Z. An Attack-Resistant Weighted Least Squares Localization Algorithm Based on RSSI. In Proceedings of the Science and Technologies for Smart Cities, Virtual, 2–4 December 2020; Paiva, S., Lopes, S.I., Zitouni, R., Gupta, N., Lopes, S.F., Yonezawa, T., Eds.; Springer: Cham, Switzerland, 2021; pp. 476–494. [Google Scholar] [CrossRef]
- Li, Y.; Ma, S.; Yang, G.; Wong, K.K. Secure Localization and Velocity Estimation in Mobile IoT Networks With Malicious Attacks. IEEE Internet Things J. 2021, 8, 6878–6892. [Google Scholar] [CrossRef]
- Wang, C.; Luo, J.; Liu, X.; He, X. Secure and Reliable Indoor Localization Based on Multitask Collaborative Learning for Large-Scale Buildings. IEEE Internet Things J. 2022, 9, 22291–22303. [Google Scholar] [CrossRef]
- Teng, Z.; Du, C.; Li, M.; Zhang, H.; Zhu, W. A Wormhole Attack Detection Algorithm Integrated with the Node Trust Optimization Model in WSNs. IEEE Sens. J. 2022, 22, 7361–7370. [Google Scholar] [CrossRef]
- Han, D.; Liu, M.; Weng, T.H.; Tang, C.; Marino, M.D.; Li, K.C. A novel secure DV-Hop localization algorithm against wormhole attacks. Telecommun. Syst. 2022, 80, 413–430. [Google Scholar] [CrossRef]
- Ruchi Garg, T.G.; Kumar, S. Wormhole attack detection and recovery for secure range free localization in large-scale wireless sensor networks. Peer-to-Peer Netw. Appl. 2023, 16, 2833–2849. [Google Scholar] [CrossRef]
- Ruchi Garg, T.G.; Kumar, S. Range free localization in WSN against wormhole attack using Farkas’ Lemma. Wirel. Netw. 2023, 29, 2029–2043. [Google Scholar] [CrossRef]
- Cheikhrouhou, O.; Koubâa, A. BlockLoc: Secure Localization in the Internet of Things using Blockchain. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 629–634. [Google Scholar] [CrossRef]
- Guan, Z.; Liu, Z.; Wen, X.; Wan, Q.; Xu, W. Trusted fingerprint localization for multimedia devices based on blockchain. Inf. Sci. 2023, 643, 119231. [Google Scholar] [CrossRef]
- Ye, Q.; Fan, X.; Bie, H.; Puthal, D.; Wu, T.; Song, X.; Fang, G. SE-Loc: Security-Enhanced Indoor Localization with Semi-Supervised Deep Learning. IEEE Trans. Netw. Sci. Eng. 2023, 10, 2964–2977. [Google Scholar] [CrossRef]
- Gebremariam, G.G.; Panda, J.; Indu, S. Secure localization techniques in wireless sensor networks against routing attacks based on hybrid machine learning models. Alex. Eng. J. 2023, 82, 82–100. [Google Scholar] [CrossRef]
- Kaliyar, P.; Jaballah, W.B.; Conti, M.; Lal, C. LiDL: Localization with early detection of sybil and wormhole attacks in IoT Networks. Comput. Secur. 2020, 94, 101849. [Google Scholar] [CrossRef]
- Gebremariam, G.G.; Panda, J.; Indu, S.; Prieto, J. Blockchain-Based Secure Localization against Malicious Nodes in IoT-Based Wireless Sensor Networks Using Federated Learning. Wirel. Commun. Mob. Comput. 2023, 2023, 8068038. [Google Scholar] [CrossRef]
- Shokry, A.; Youssef, M. Towards Quantum Computing for Location Tracking and Spatial Systems. In Proceedings of the 29th International Conference on Advances in Geographic Information Systems, Beijing, China, 2–5 November 2021; SIGSPATIAL ’21. pp. 278–281. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








| Acronym | Definition | Acronym | Definition |
|---|---|---|---|
| ANN | Artificial Neural Network | AoA | Angle of Arrival |
| AP | Access Points | BLE | Bluetooth Low Energy |
| CNN | Convolutional Neural Network | CSI | Channel State Information |
| CSO | Chicken Swarm Optimization | DoS | Denial-of-Service |
| DV–Hop | Distance Vector–Hop | IIoT | Industrial Internet of Things |
| IoT | Internet of Things | LBS | Location-Based Services |
| LoRa | Long Range | LOS | Line Of Sight |
| LPWAN | Low-Power Wide-Area Network | LS | Least Squares |
| LSTM | Long Short-Term Memory | LTE | Long-Term Evolution |
| M2H | Machine-to-Humans | M2M | Machine-to-Machine |
| MIMO | Multiple-Input and Multiple-Output | ML | Machine Learning |
| MLE | Maximum Likelihood Estimation | NB-IoT | Narrowband Internet of Things |
| NLOS | Non-Line Of Sight | NLS | Non-linear Least Squares |
| PSO | Particle Swarm Optimization | RIS | Reconfigurable Intelligent Surfaces |
| RTT | Round-Trip Time | RSS | Received Signal Strength |
| SDP | Semi-Definite Programming | SDR | Software-Defined Radio |
| SNR | Signal-to-Noise Ratio | SWLS | Secure Weighted Least Squares |
| TDoA | Time Difference of Arrival | ToA | Time of Arrival |
| ToF | Time of Flight | UWB | Ultra-WideBand |
| WLS | Weighted Least Squares | WSN | Wireless Sensor Network |
| Topic | Year | Reference | Type of Work |
|---|---|---|---|
| Proximity | 2018 | [47,49] | Experimental |
| 2020 | [48,50] | ||
| RSS | 2018 | [52] | |
| 2019 | [55] | ||
| [56] | Simulation/Experimental | ||
| 2022 | [53] | ||
| [57] | Simulation | ||
| 2023 | [54] | Experimental | |
| AoA | 2019 | [75] | Simulation/Experimental |
| [77] | Experimental | ||
| 2020 | [78,79] | Simulation/Experimental | |
| 2021 | [76] | Experimental | |
| 2022 | [80] | Simulation | |
| ToA/ToF | 2019 | [58,60] | Simulation/Experimental |
| 2021 | [59] | Experimental | |
| TDoA | 2019 | [62] | Simulation/Experimental |
| 2020 | [67] | Simulation | |
| [68] | Simulation/Experimental | ||
| 2021 | [63] | Simulation | |
| [65] | Simulation/Experimental | ||
| 2022 | [64] | Experimental | |
| 2023 | [66] | Simulation/Experimental | |
| PDoA | 2019 | [70] | Experimental |
| 2020 | [73] | ||
| 2021 | [71] | Simulation | |
| 2022 | [72] | Simulation/Experimental | |
| Fingerprinting | 2019 | [34] | Experimental |
| 2020 | [37] | Simulation/Experimental | |
| [38] | Experimental | ||
| 2022 | [35,36,39] | ||
| Connectivity Information | 2019 | [41,42] | Simulation |
| 2020 | [45] | ||
| 2021 | [43] | ||
| 2023 | [44] | ||
| Joint Techniques | 2019 | [81] | Experimental |
| [82,84] | Simulation | ||
| 2020 | [85] | ||
| 2021 | [83] | Experimental | |
| Data Fusion | 2019 | [86,88] | |
| 2020 | [90] | ||
| 2022 | [89] | ||
| 2023 | [87] |
| Technique | Accuracy | Implementation Cost | Complexity and Energy Consumption | Coverage and Scalability |
|---|---|---|---|---|
| Fingerprinting | Medium/High | Medium/High | Low/Medium | High |
| Connectivity Information | Low | Medium/High | Medium | High |
| Proximity | Low | Low | Low | Low/Medium |
| Multilateration-based | Medium/High | High | High | Medium/High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pettorru, G.; Pilloni, V.; Martalò, M. Trustworthy Localization in IoT Networks: A Survey of Localization Techniques, Threats, and Mitigation. Sensors 2024, 24, 2214. https://doi.org/10.3390/s24072214
Pettorru G, Pilloni V, Martalò M. Trustworthy Localization in IoT Networks: A Survey of Localization Techniques, Threats, and Mitigation. Sensors. 2024; 24(7):2214. https://doi.org/10.3390/s24072214
Chicago/Turabian StylePettorru, Giovanni, Virginia Pilloni, and Marco Martalò. 2024. "Trustworthy Localization in IoT Networks: A Survey of Localization Techniques, Threats, and Mitigation" Sensors 24, no. 7: 2214. https://doi.org/10.3390/s24072214