

A High-Resolution Imaging Method for Multiple-Input Multiple-Output Sonar Based on Deterministic Compressed Sensing

Abstract
:1. Introduction
2. Methods
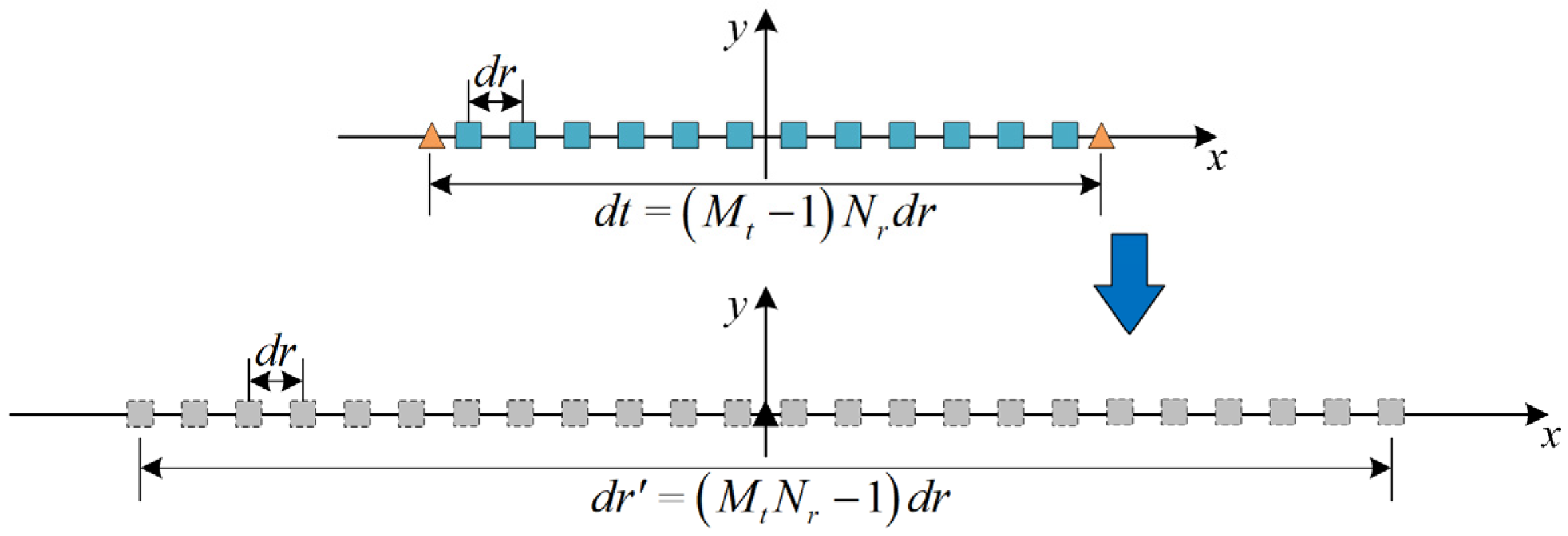
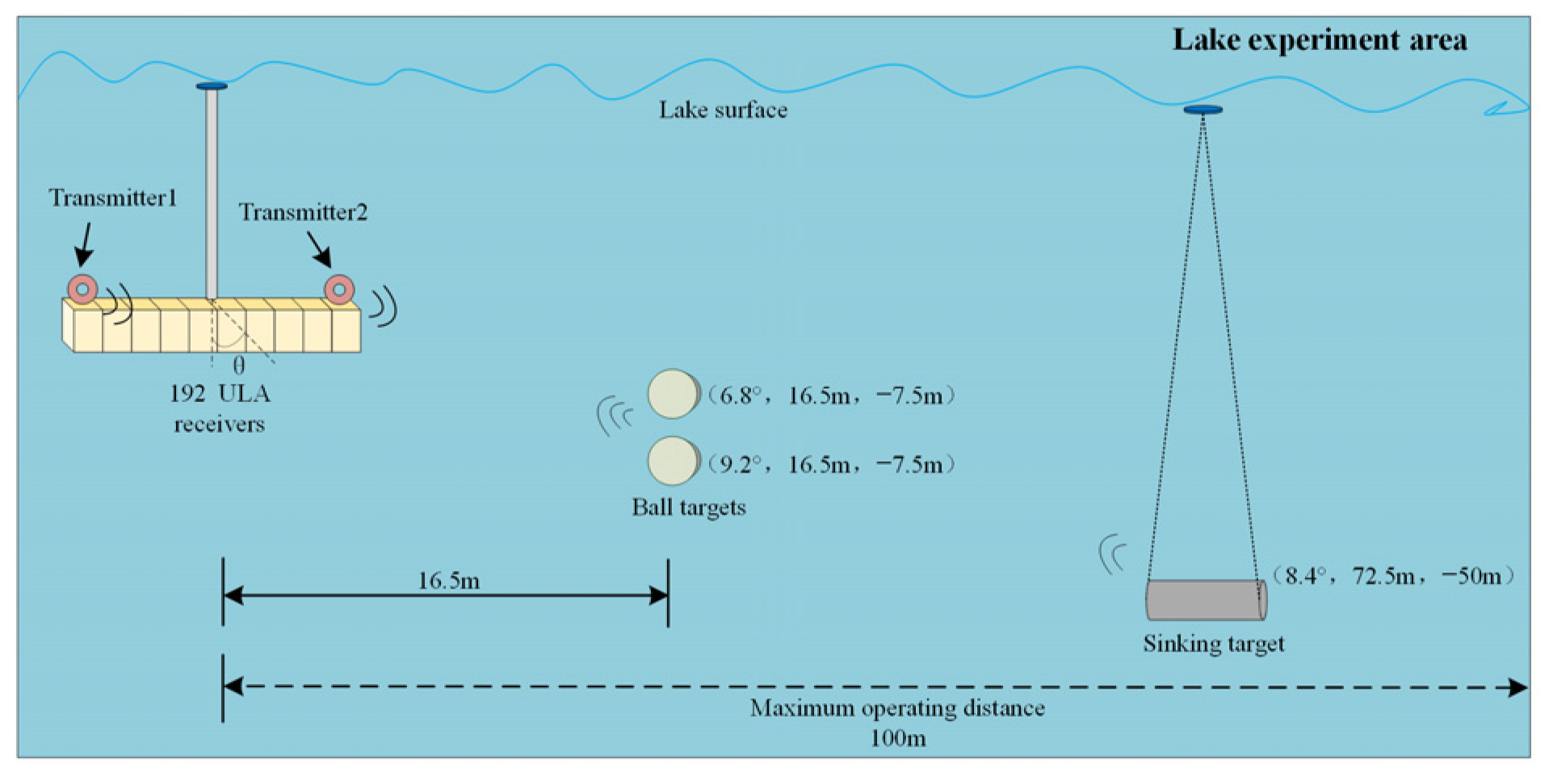
2.1. MIMO Sonar Array Layout
2.2. Signal Model
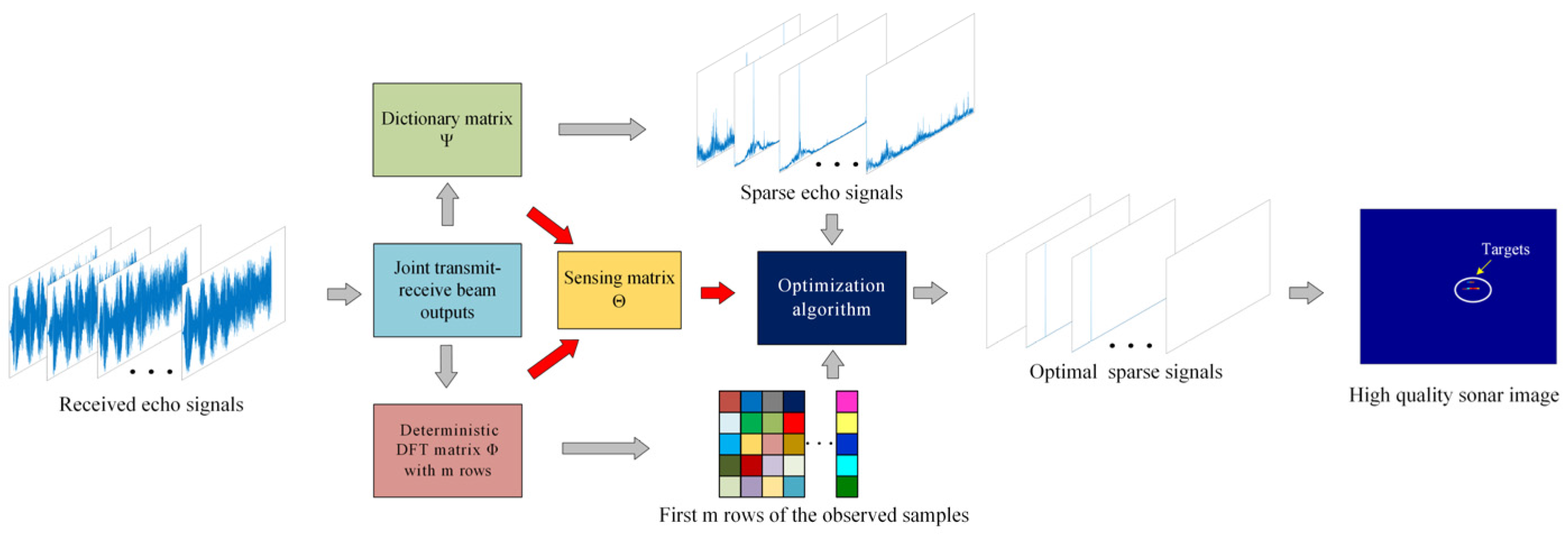
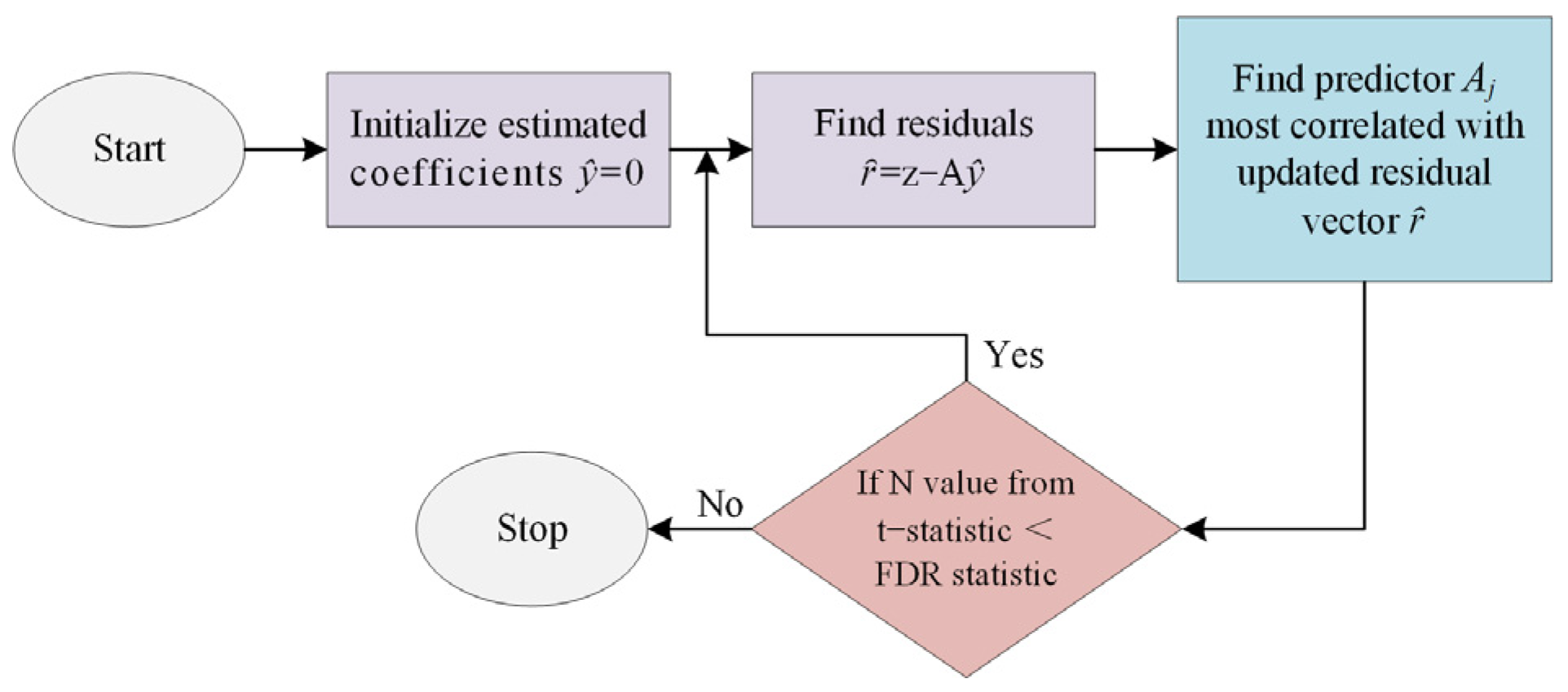
2.3. The Procedure of the Proposed Method
3. Results and Discussion
3.1. Numerical Simulation
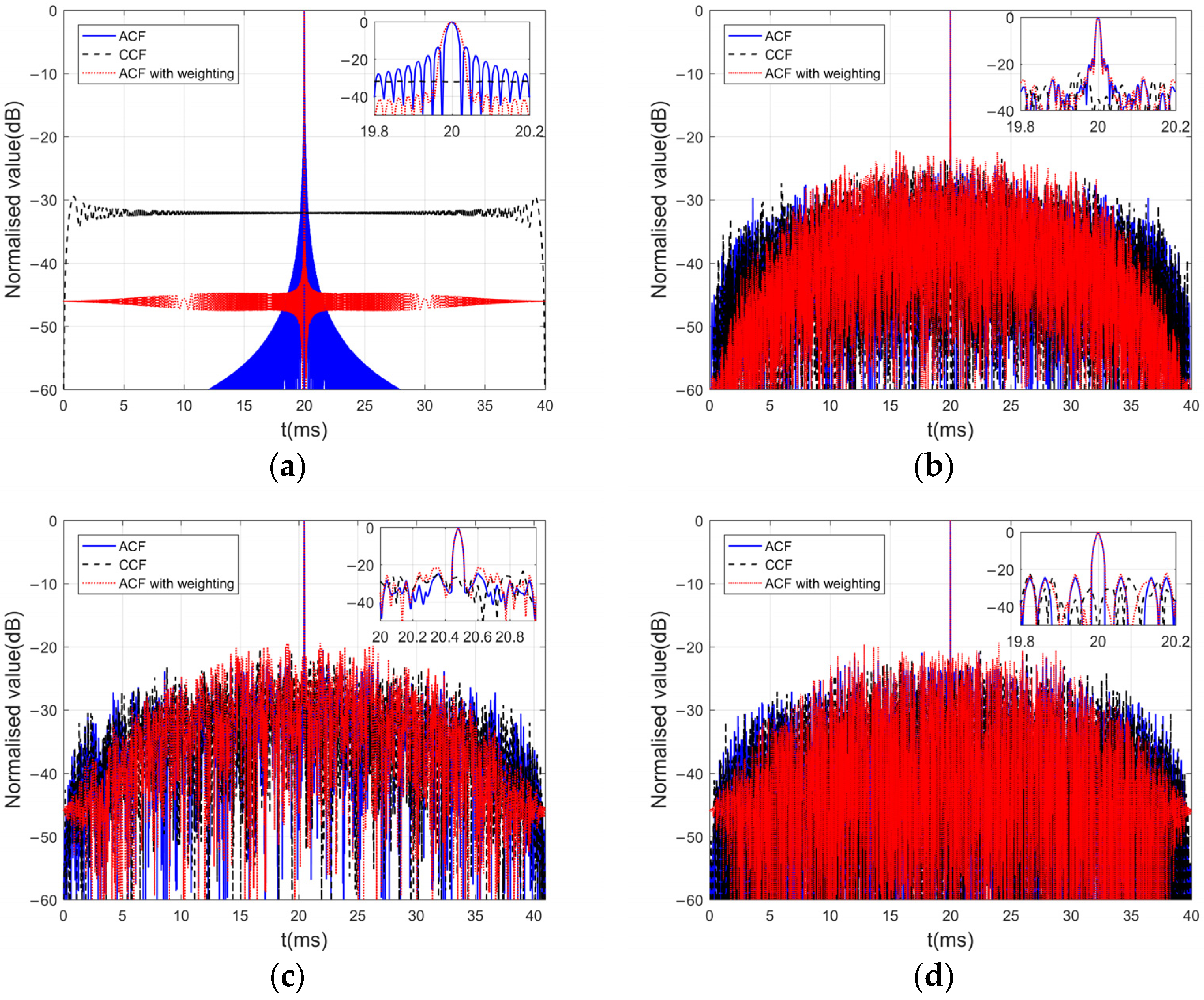
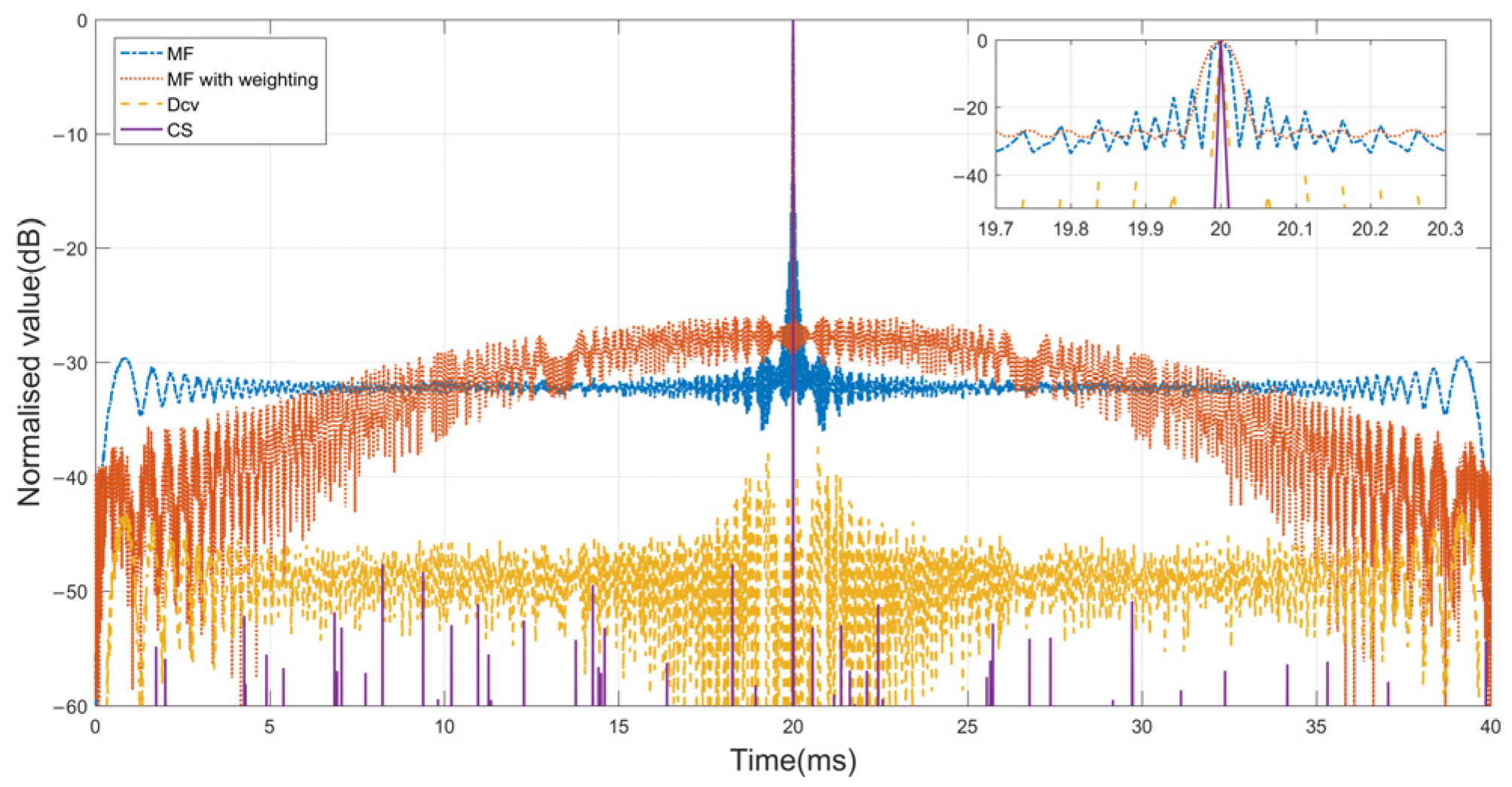
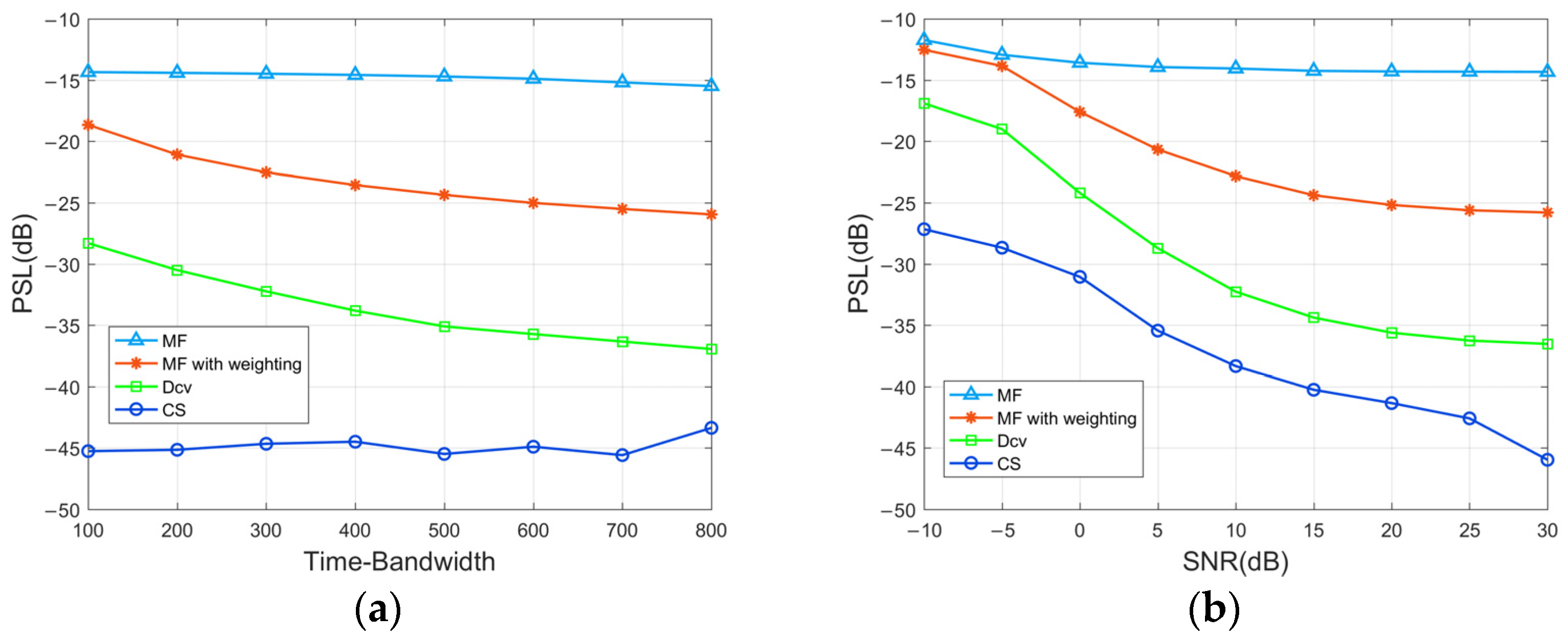
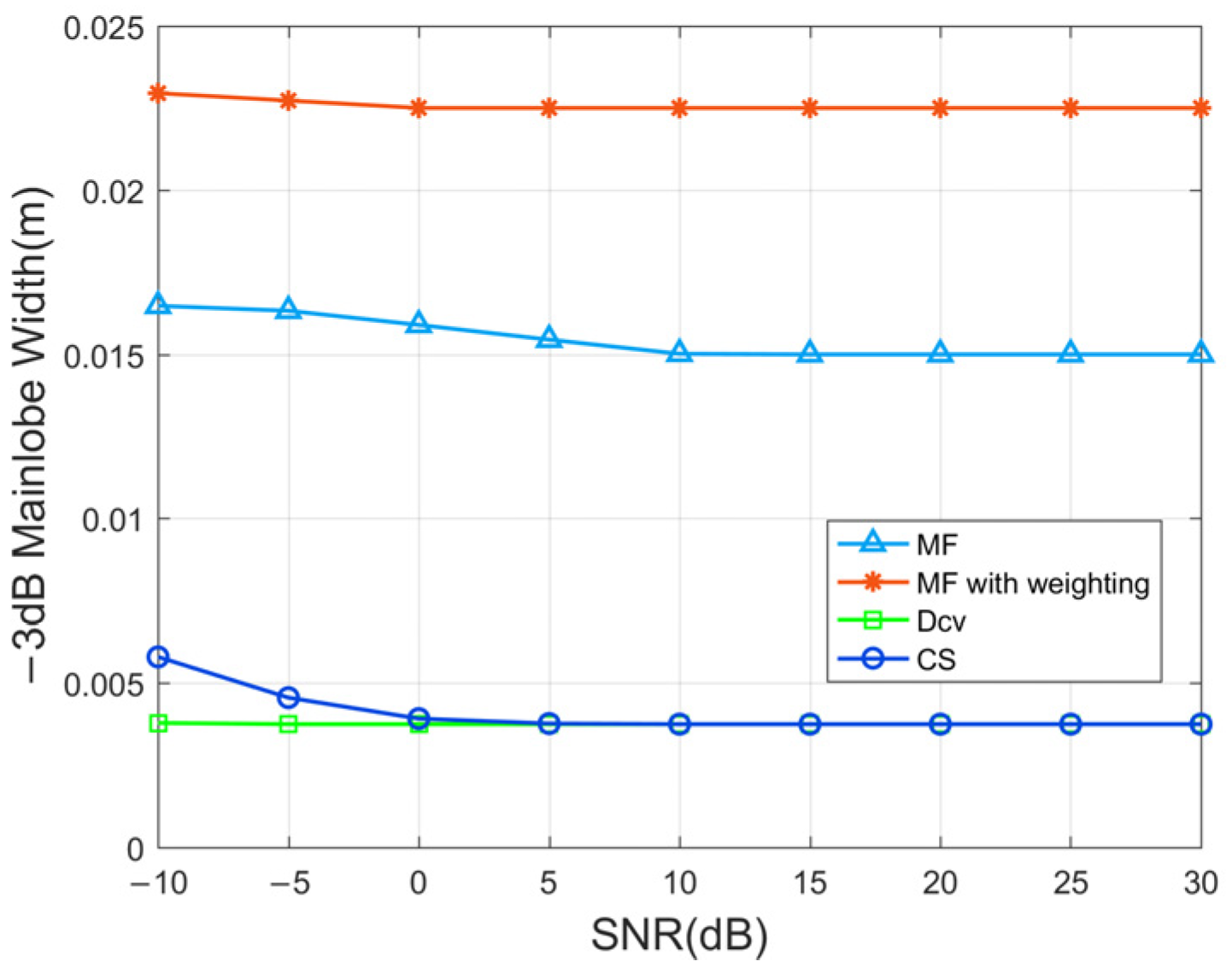
3.1.1. PSL and Main Lobe Width of the Output Results
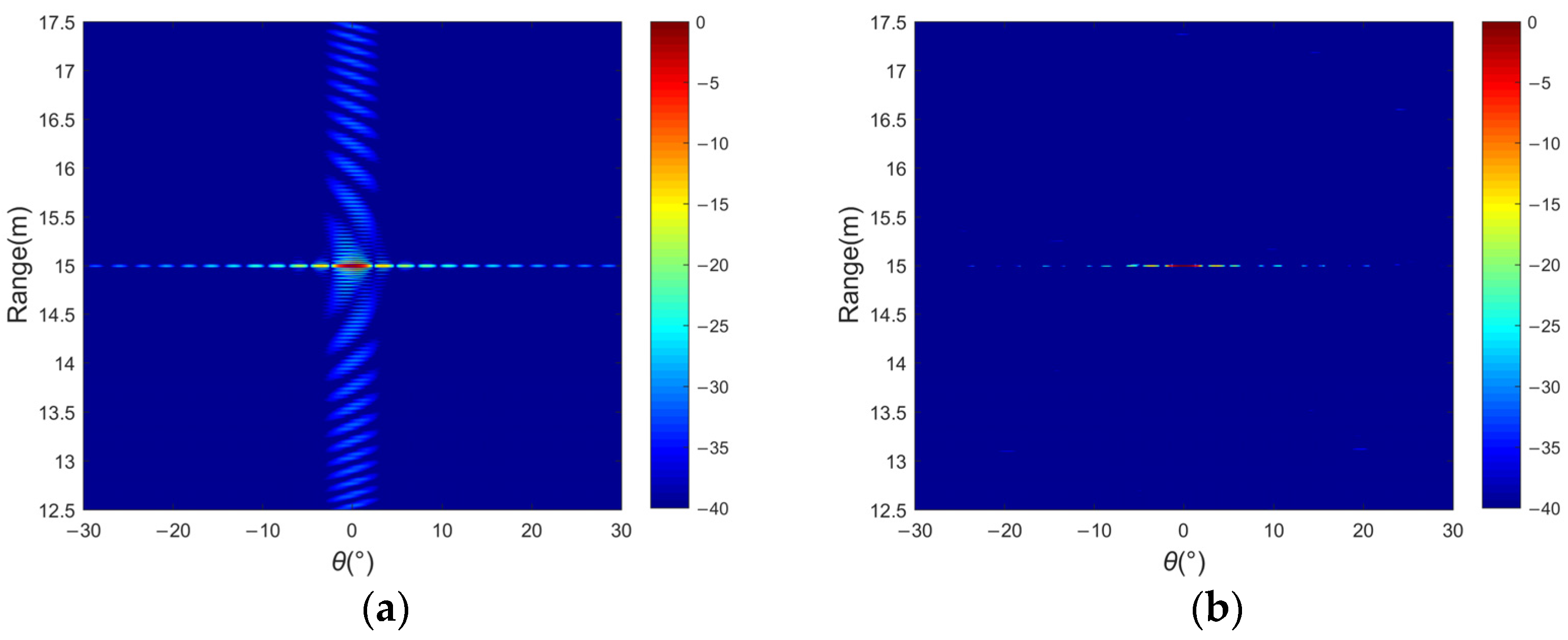
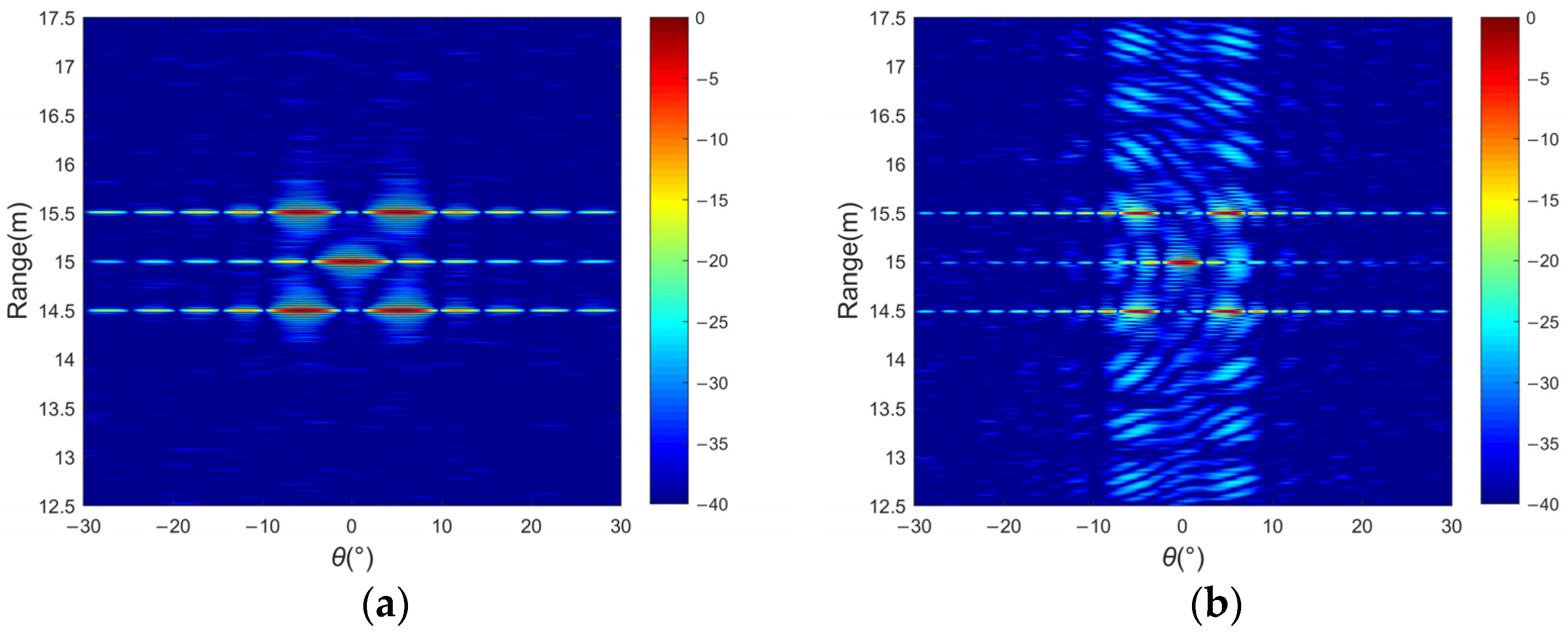
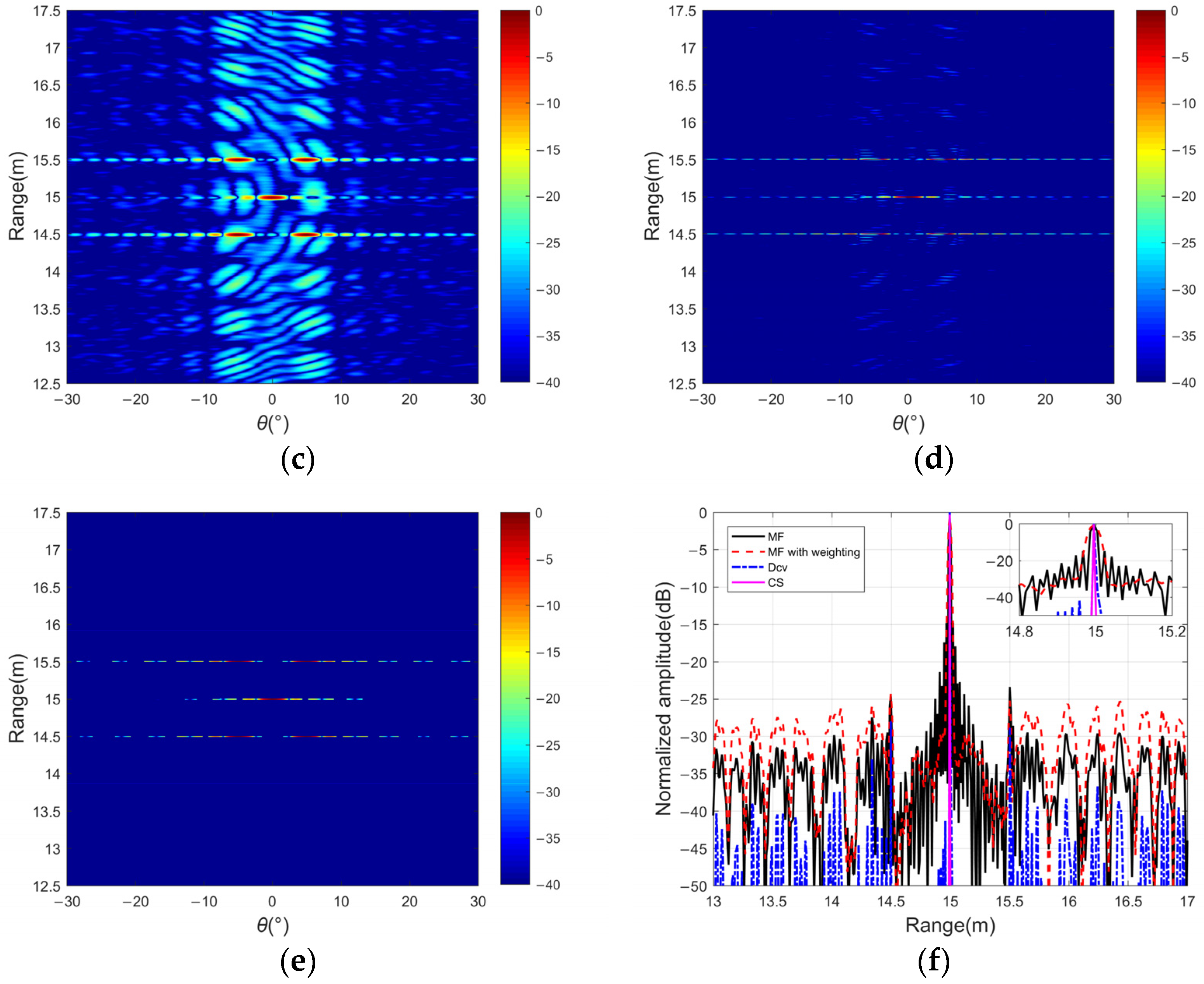
3.1.2. Imaging Results
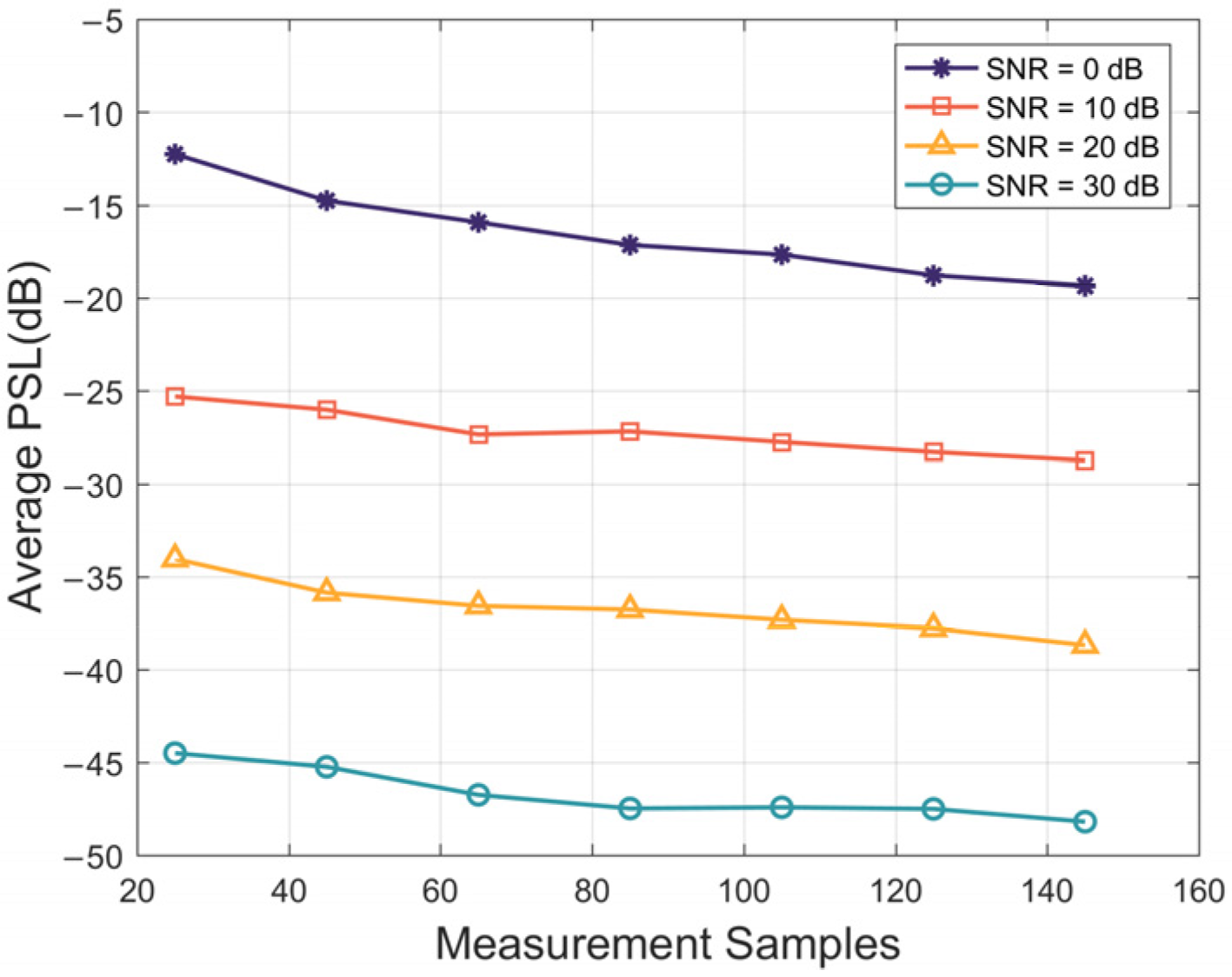
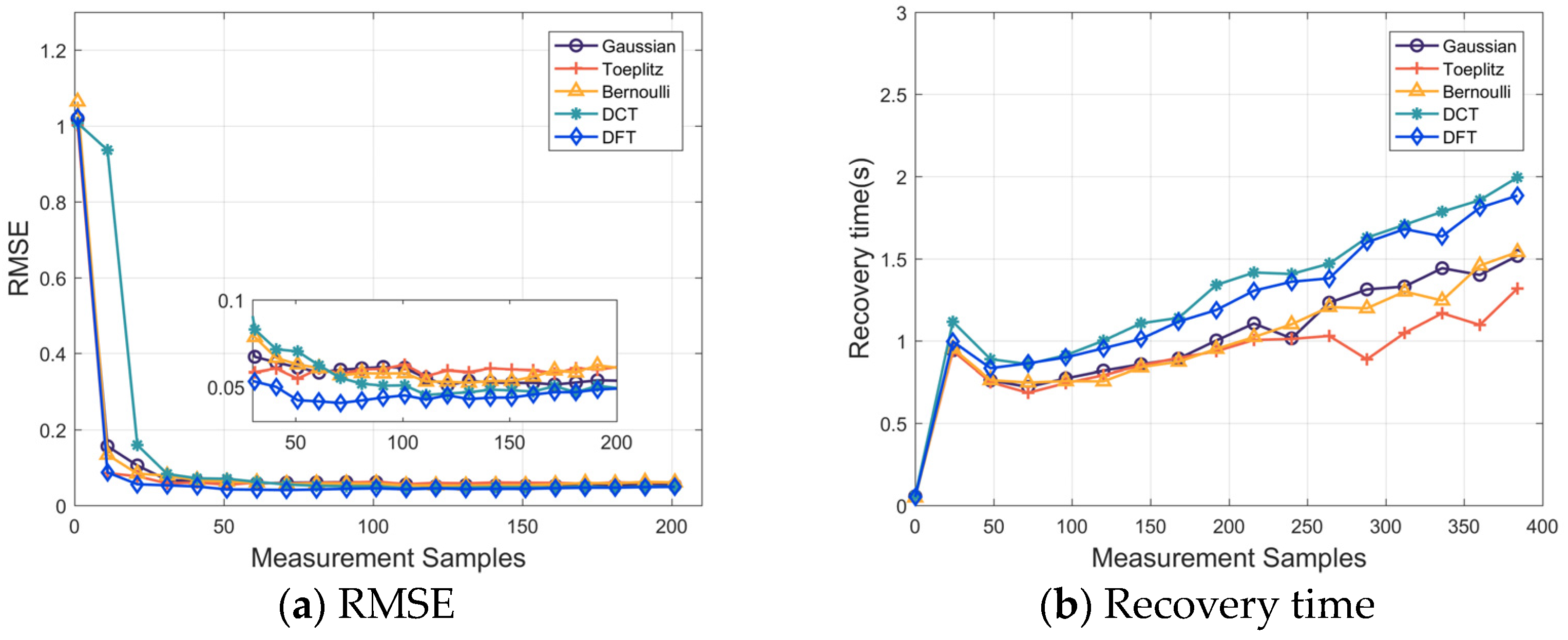
3.1.3. The Effect of the Measurement Samples
3.2. Experimental Data Processing
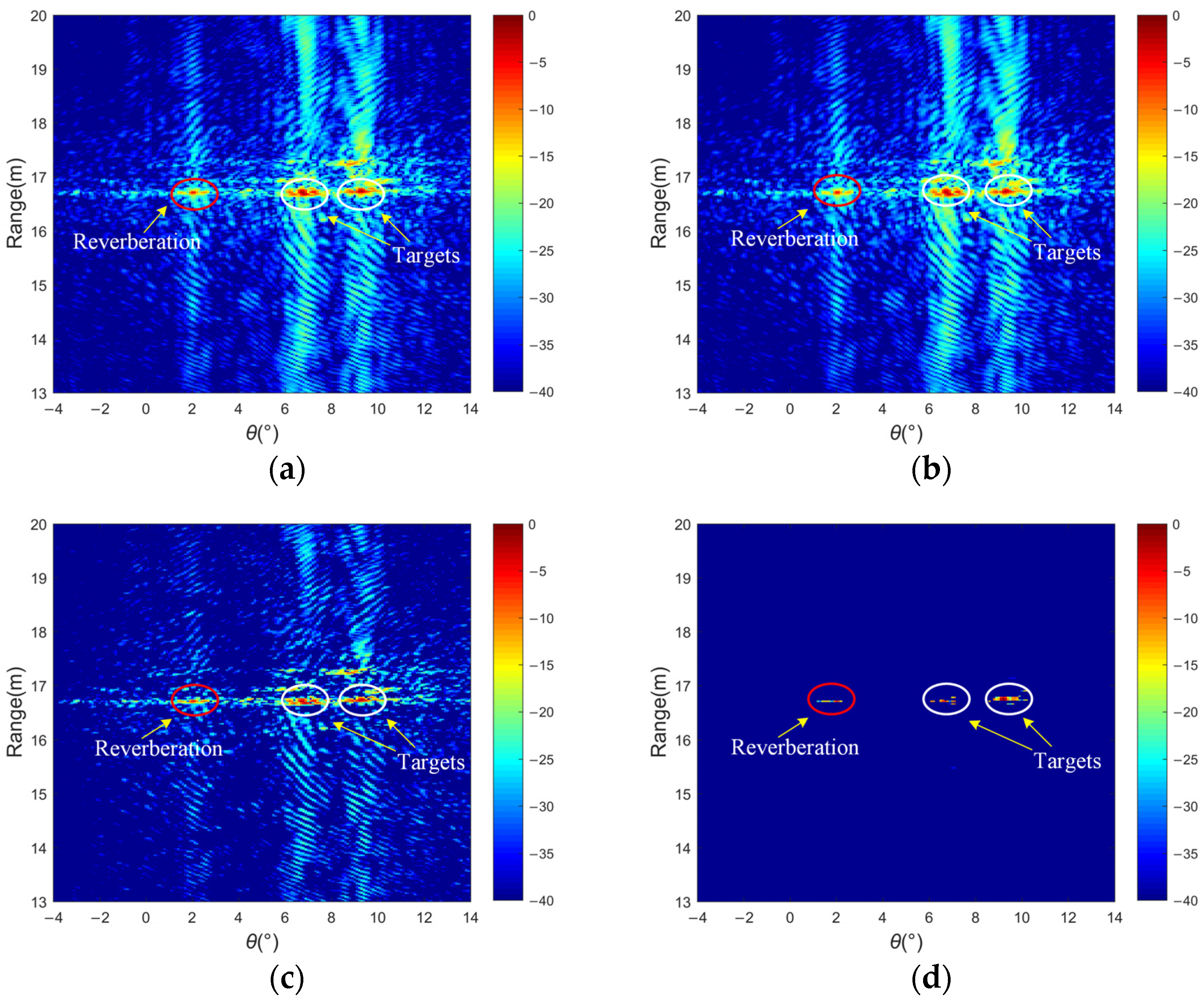
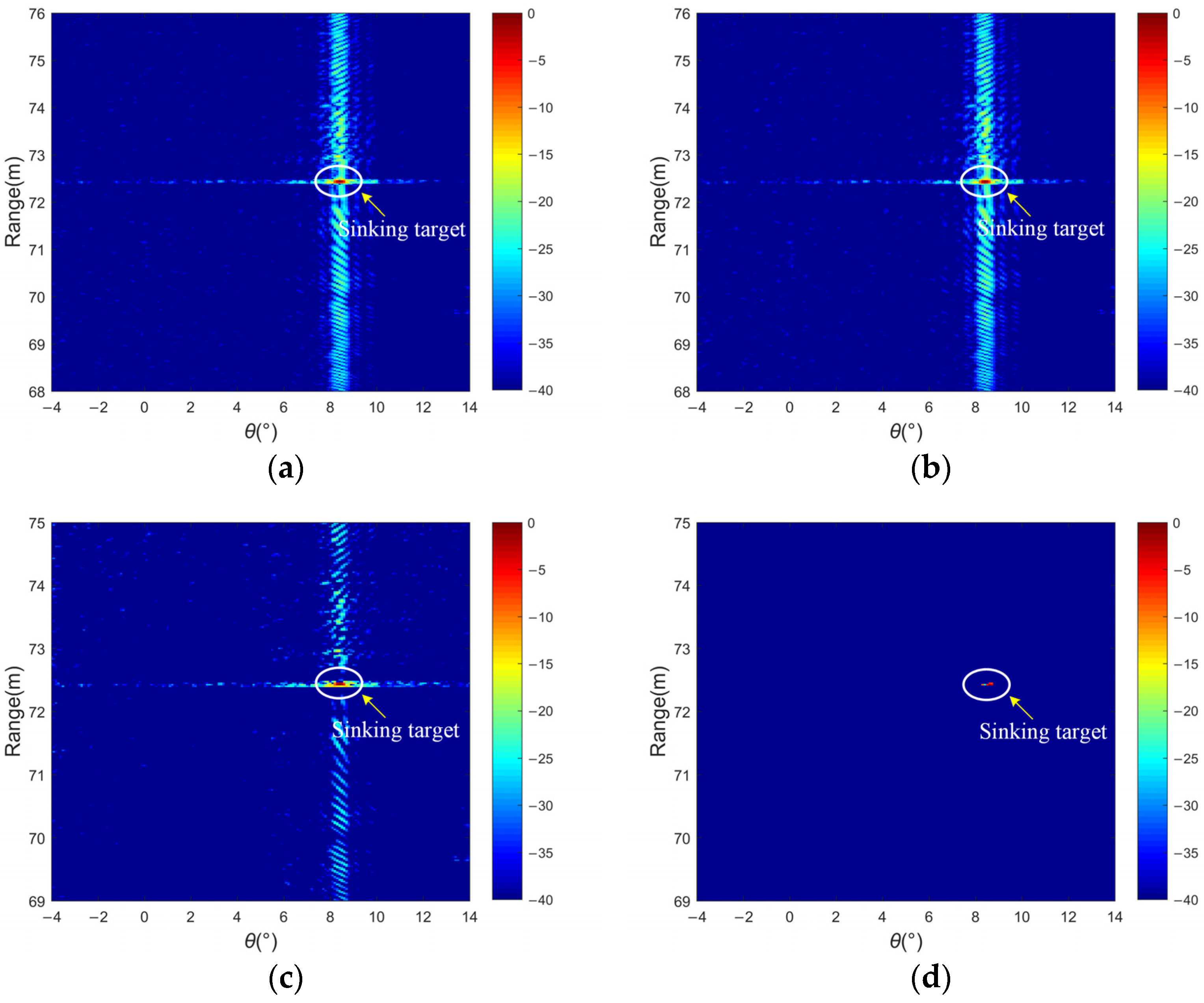
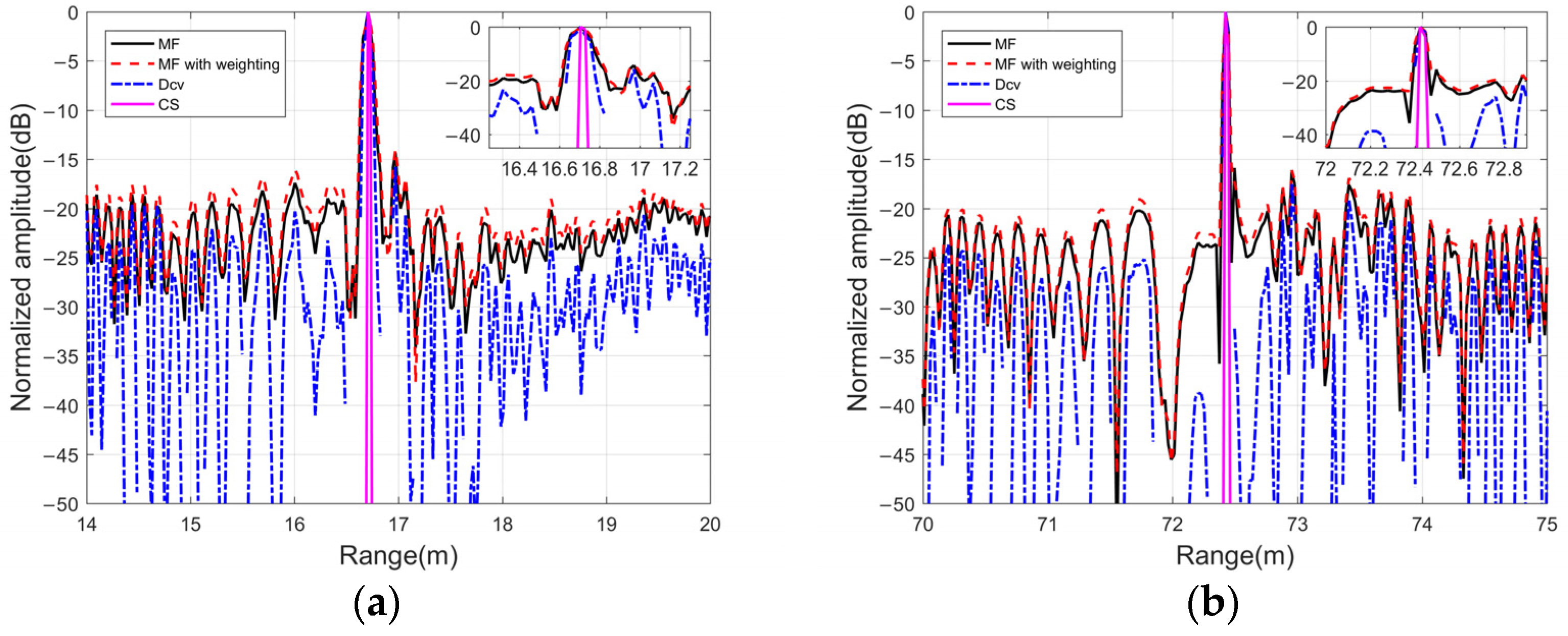
3.2.1. Imaging Results of Different Methods
3.2.2. Performance Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, L.Z.; Li, J.; Petre, S. Target Detection and Parameter Estimation for MIMO Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 927–939. [Google Scholar]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Pailhas, Y.; Petillot, Y. MIMO sonar systems for harbour surveillance. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar]
- Pan, X.; Jiang, J.; Wang, N. Evaluation of the Performance of the Distributed Phased-MIMO Sonar. Sensors 2017, 17, 133. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R.A. Spatial Diversity in Radars—Models and Detection Performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Vossen, R.V.; Raa, L.T.; Blacquière, G. Acquisition conceptsfor MIMO sonar. In Proceedings of the 3rd International Conference and Exhibition on Underwater Acoustic Measurements-Technologies & Results—UAM, Nafplion, Greece, 21–26 June 2009; pp. 21–26. [Google Scholar]
- Li, J.; Xu, L.Z.; Petre, S.; Forsythe, K.W.; Bliss, D.W.; Daniel, W. Range compression and waveform optimization for MIMO radar: A cramér–rao bound based study. IEEE Trans. Signal Process. 2008, 56, 218–232. [Google Scholar]
- Gao, C.C.; The, K.C.; Liu, A.F. Orthogonal Frequency Diversity Waveform with Range-Doppler Optimization for MIMO Radar. IEEE Signal Process. Lett. 2014, 21, 1201–1205. [Google Scholar] [CrossRef]
- Liu, X.H.; Sun, C.; Yang, Y.; Jie, Z. High-range-resolution two-dimensional imaging using frequency diversity multiple-input–multiple-output sonar. IET Radar Sonar Navig. 2016, 10, 983–991. [Google Scholar] [CrossRef]
- He, H.; Petre, S.; Li, J. Designing unimodular sequence sets with good correlations including a application to MIMO radar. IEEE Trans. Signal Process. 2009, 57, 4391–4405. [Google Scholar] [CrossRef]
- Pan, X.; Li, S.; Chen, P. Distributed broadband phased-MIMO sonar for detection of small targets in shallow water environments. IET Radar Sonar Navig. 2018, 12, 721–728. [Google Scholar] [CrossRef]
- Liu, X.H.; Wei, T.; Sun, C.; Yang, Y.; Zhuo, J. High-resolution two-dimensional imaging using MIMO sonar with limited physical size. Appl. Acoust. 2021, 182, 108280. [Google Scholar] [CrossRef]
- He, H.; Petre, S.; Li, J. Wideband MIMO waveform design for transmit beampattern synthesis. IEEE Trans. Signal Process. 2011, 59, 618–628. [Google Scholar] [CrossRef]
- Veluthandath, A.V.; Bhattacharya, S.; Murugan, G.S.; Bisht, P.B. Fano Resonances and Photoluminescence in Self-Assembled High-Quality-Factor Microbottle Resonators. IEEE Photonics Technol. Lett. 2019, 31, 226–229. [Google Scholar] [CrossRef]
- Khan, H.A.; Khan, A.D.; Shah, S.W.; Chaudhry, M.R.; Azeem, F.; Ahmed, S.; Ahmad, K. Exploring the influence of nanocavity alignment on slow light generation via multiple EIT and Fano resonances in square lattice plasmonic silver nanostructures. J. Opt. 2023, 25, 105002. [Google Scholar] [CrossRef]
- Ilchenko, M.Y.; Zhivkov, O.P.; Kamarali, R.V.; Lutchak, O.V.; Fedorchuk, O.P.; V’yunov, O.I.; Belous, A.G.; Plutenko, T.O.; Avdeyenko, G.L. Modeling of Electromagnetically Induced Transparency with RLC Circuits and Metamaterial Cell. IEEE Trans. Microw. Theory Tech. 2023, 71, 5104–5110. [Google Scholar] [CrossRef]
- Liu, X.H.; Sun, C.; Zhuo, J.; Shao, X.; Xie, L. Proposing a mismatched filtering method for obtaining better sidelobe suppression effect for MIMO sonar imaging based on convex optimization. J. Northwest. Polytech. Univ. 2013, 31, 367–372. [Google Scholar]
- Liu, F.; Mu, S.X.; Lyu, W.H.; Ge, T. MIMO SAR waveform separation based on Costas-LFM signal and co-arrays for maritime surveillance. IET Radar Sonar Navig. 2017, 26, 211–217. [Google Scholar] [CrossRef]
- Yan, S.; Hao, C.P.; Liu, M.G.; Chen, D. Bistatic MIMO Sonar Space-Time Adaptive Processing Based on Knowledge-aided Transform. In Proceedings of the 2018 OCEANS–MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar]
- Pailhas, Y.; Petillot, Y. Spatially distributed MIMO sonar systems: Principles and capabilities. IEEE J. Ocean. Eng. 2017, 42, 738–751. [Google Scholar] [CrossRef]
- Herman, M.A.; Strohmer, T. High-resolution Radar via Compressed Sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef]
- Hadi, M.A.; Alshebeili, S.; Jamil, K.; Fathi, E.; El-Samie, A. Compressive sensing applied to radar systems: An overview. Signal Image Video Process. 2015, 9, 25–39. [Google Scholar] [CrossRef]
- Hanumanthu, S.; Kumar, P.R. Detection and Estimation of Multiple Point Targets for LFM Echo using Compressed Sensing. In Proceedings of the International Conference on Intelligent Computing in Control and Communication, Andhra Pradesh, India, 20–21 March 2020; Volume 702, pp. 267–279. [Google Scholar]
- Hanumanthu, S.; Kumar, P.R. Deterministic compressed sensing LFM radar for range-Doppler estimation of multiple moving targets. Measurement 2022, 187, 110315. [Google Scholar] [CrossRef]
- Li, J.; Petre, S.; Zheng, X.Y. Signal synthesis and receiver design for MIMO radar imaging. IEEE Trans. Signal Process. 2008, 56, 3959–3968. [Google Scholar] [CrossRef]
- WU, J.; Liu, X.H.; Sun, C.; Jiang, G.; Kong, D.; Fan, K. On Range-dimensional Performance Improvement of FD-MIMO Sonar Using Deconvolution. In Proceedings of the Global Oceans 2020, Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar]
- Liu, X.H.; Shi, R.; Sun, C.; Yang, Y.; Zhuo, J. Using deconvolution to suppress range sidelobes for MIMO sonar imaging. Appl. Acoust. 2022, 186, 108491. [Google Scholar] [CrossRef]
- Cai, L.; Ma, X.C.; Li, S.S. On orthogonal waveform design for MIMO sonar. In Proceedings of the IEEE 2010 International Conference on Intelligent Control and Information Processing, Dalian, China, 13–15 August 2010; pp. 69–72. [Google Scholar]
- Pailhas, Y.; Petillot, Y. Wideband CDMA waveforms for large MIMO sonar systems. In Proceedings of the 2015 Sensor Signal Processing for Defence (SSPD), Edinburgh, UK, 9–10 September 2015; pp. 1–4. [Google Scholar]
- Iqbal, N.; Masood, M.; Alfarraj, M.; Waheed, U.B. Deep seismic cs: A deep learning assisted compressive sensing for seismic data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–9. [Google Scholar] [CrossRef]
- Kutyniok, G. Theory and Applications of Compressed Sensing. GAMM-Mitteilungen 2013, 36, 79–101. [Google Scholar] [CrossRef]
- López, Y.Á.; Lorenzo, J.Á.M. Compressed Sensing Techniques Applied to Ultrasonic Imaging of Cargo Containers. Sensors 2017, 17, 162. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef]
- Monk, D.J. Survey Design and Seismic Acquisition for Land, Marine, and In-Between in Light of New Technology and Techniques; Society of Exploration Geophysicists: Tulsa, OK, USA, 2020. [Google Scholar]
- Hanumanthu, S.; Kumar, P.R. Universal Measurement Matrix Design for Sparse and Co-Sparse Signal Recovery. Turk. J. Comput. Math. Educ. 2021, 12, 404–411. [Google Scholar]
- Yang, T.C. Deconvolution of decomposed conventional beamforming. J. Acoust. Soc. Am. 2020, 148, 195–201. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Quantity of transmitters and receivers | 2 and 24 |
| Center frequency | 400 kHz |
| Pulse bandwidth and length | 40 kHz, 20 ms |
| Single target | (0°, 15 m) |
| Multiple targets | (−5°, 14.5 m), (−5°, 15.5 m), (0°, 15 m), (5°, 14.5 m), (5°, 15.5 m) |
| Methods | PSL (dB) | −3 dB Main Lobe Width (s) |
|---|---|---|
| MF | −14.34 | 2 × 10−5 |
| MF with weighting | −25.90 | 3 × 10−5 |
| Dcv | −36.82 | 2.2 × 10−6 |
| CS | −47.68 | 1.1 × 10−6 |
| Targets | Methods | PSL (dB) | −3 dB Main Lobe Width (m) |
|---|---|---|---|
| ball targets | MF | −13.85 dB | 0.09 |
| MF with weighting | −14.03 dB | 0.1 | |
| Dcv | −15.81 dB | 0.05 | |
| CS | −59.98 dB | 0.03 | |
| sinking target | MF | −15.89 dB | 0.035 |
| MF with weighting | −16.08 dB | 0.04 | |
| Dcv | −17.39 dB | 0.03 | |
| CS | −60.01 dB | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, N.; Xu, F.; Yang, J. A High-Resolution Imaging Method for Multiple-Input Multiple-Output Sonar Based on Deterministic Compressed Sensing. Sensors 2024, 24, 1296. https://doi.org/10.3390/s24041296
Gao N, Xu F, Yang J. A High-Resolution Imaging Method for Multiple-Input Multiple-Output Sonar Based on Deterministic Compressed Sensing. Sensors. 2024; 24(4):1296. https://doi.org/10.3390/s24041296
Chicago/Turabian StyleGao, Ning, Feng Xu, and Juan Yang. 2024. "A High-Resolution Imaging Method for Multiple-Input Multiple-Output Sonar Based on Deterministic Compressed Sensing" Sensors 24, no. 4: 1296. https://doi.org/10.3390/s24041296