
Data Fusion of Dual Foot-Mounted INS Based on Human Step Length Model

Abstract
:1. Introduction
- We collected human kinematics data using an optical–inertial fusion motion capture system. A whole-body musculoskeletal model of the human body was created to analyse navigation-related human kinematic parameters and build the human step length model. This provides a parameter basis for the navigation algorithm.
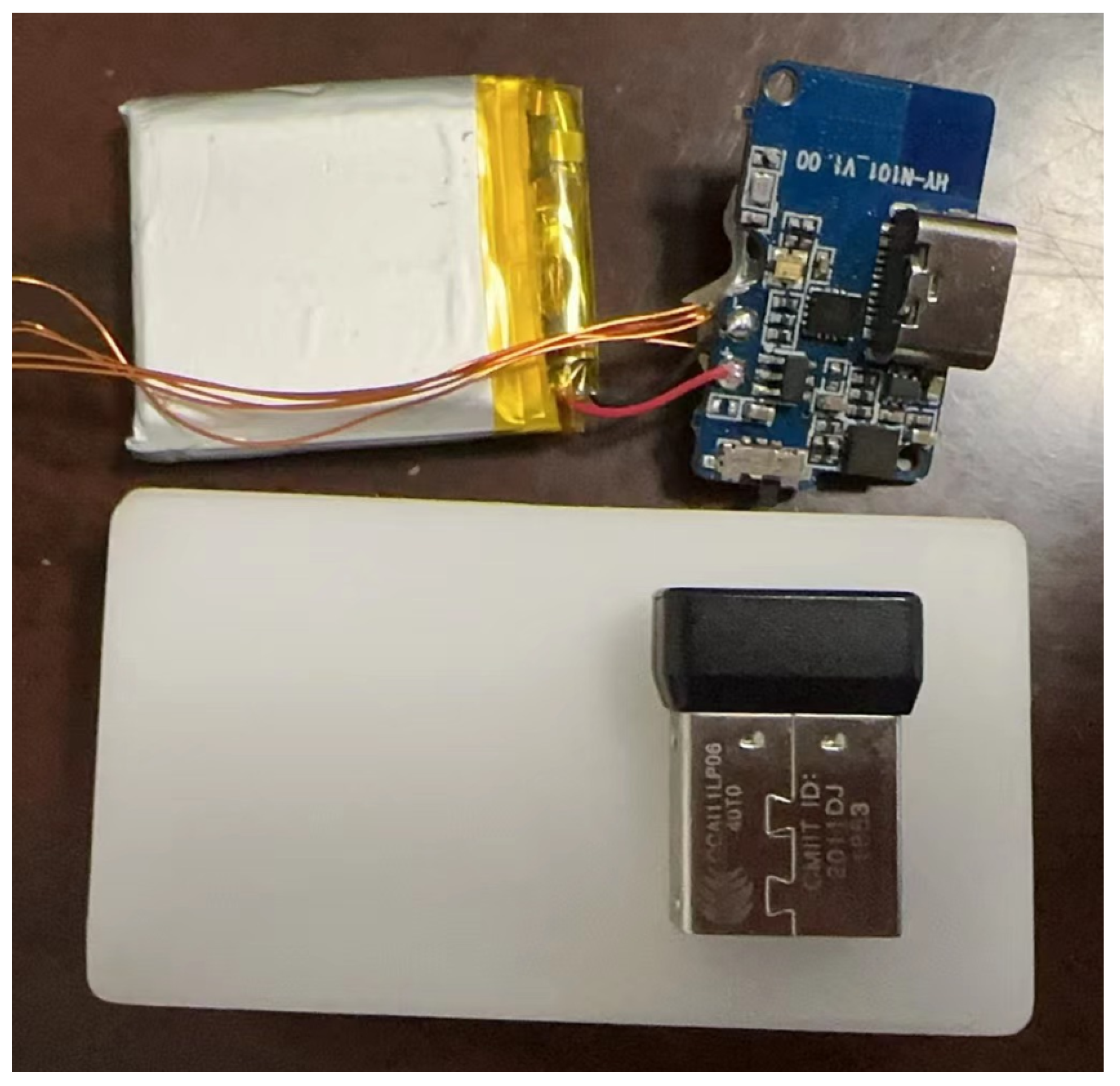
- We developed an embedded pedestrian navigation system that includes an IMU and a barometer. The system acquires and wirelessly transmits navigation data. We used this system to verify the effectiveness of the navigation algorithm.
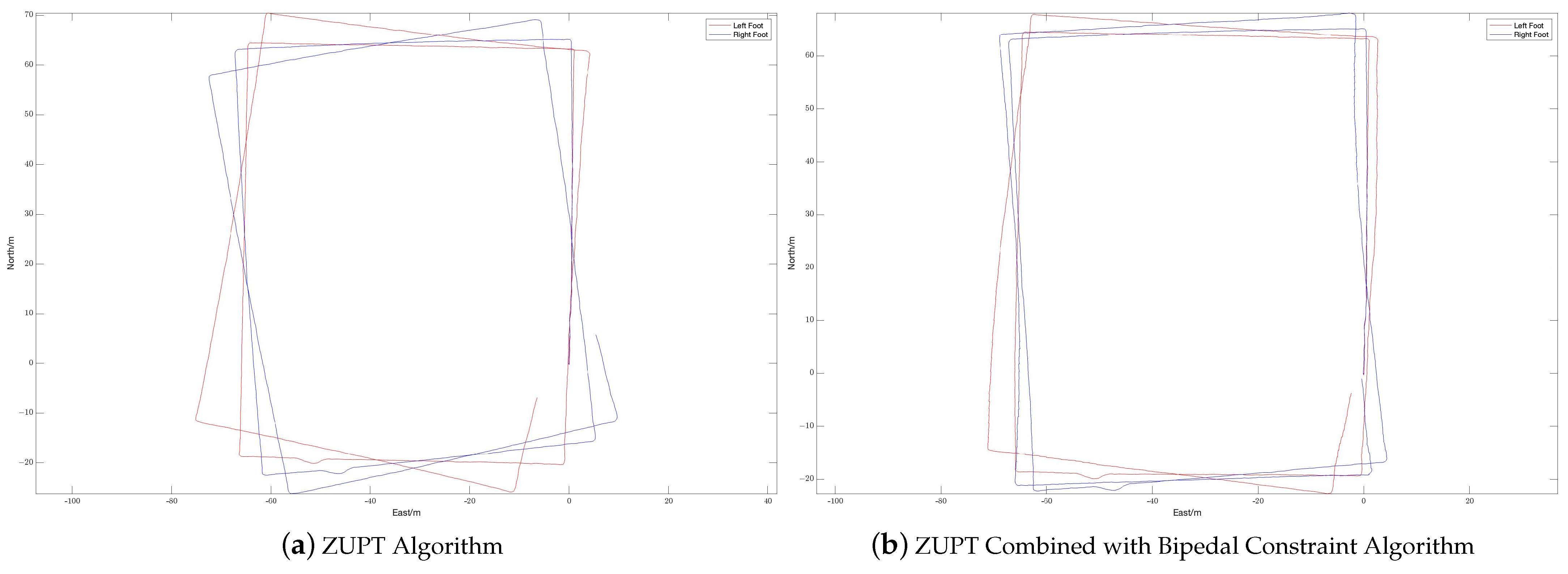
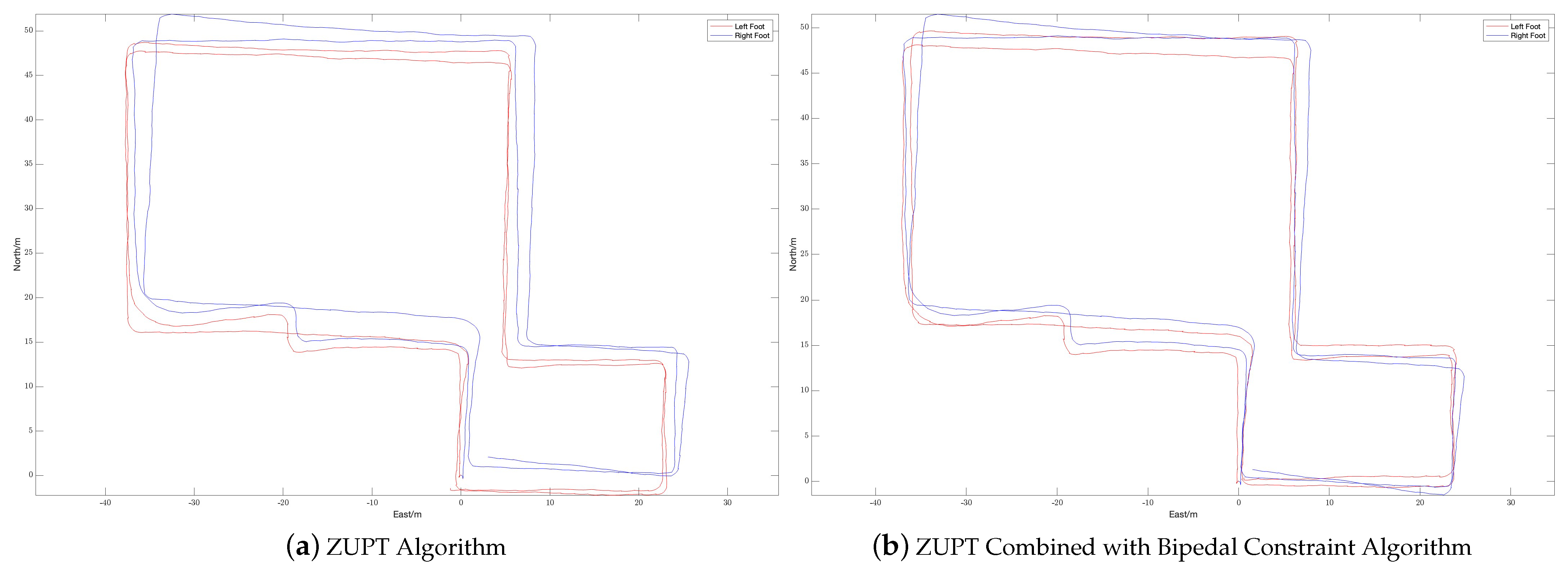
- We proposed the bipedal constraint algorithm to address the issue of the ZUPT algorithm’s inability to constrain the heading angle. The virtual observation quantities and corresponding observation matrices of both the ZUPT algorithm and the bipedal constraint algorithm were constructed for application to the Kalman filter. The experiment demonstrates that the bipedal constraint algorithm effectively limits the heading angle error during navigation and enhances the accuracy of navigation and positioning.
2. Pedestrian Navigation System
2.1. Strapdown Inertial Navigation System
2.1.1. Attitude Update Algorithm
2.1.2. Speed Update Algorithm
2.1.3. Position Update Algorithm
2.1.4. Attitude Initialization
2.2. Human Step Length Model
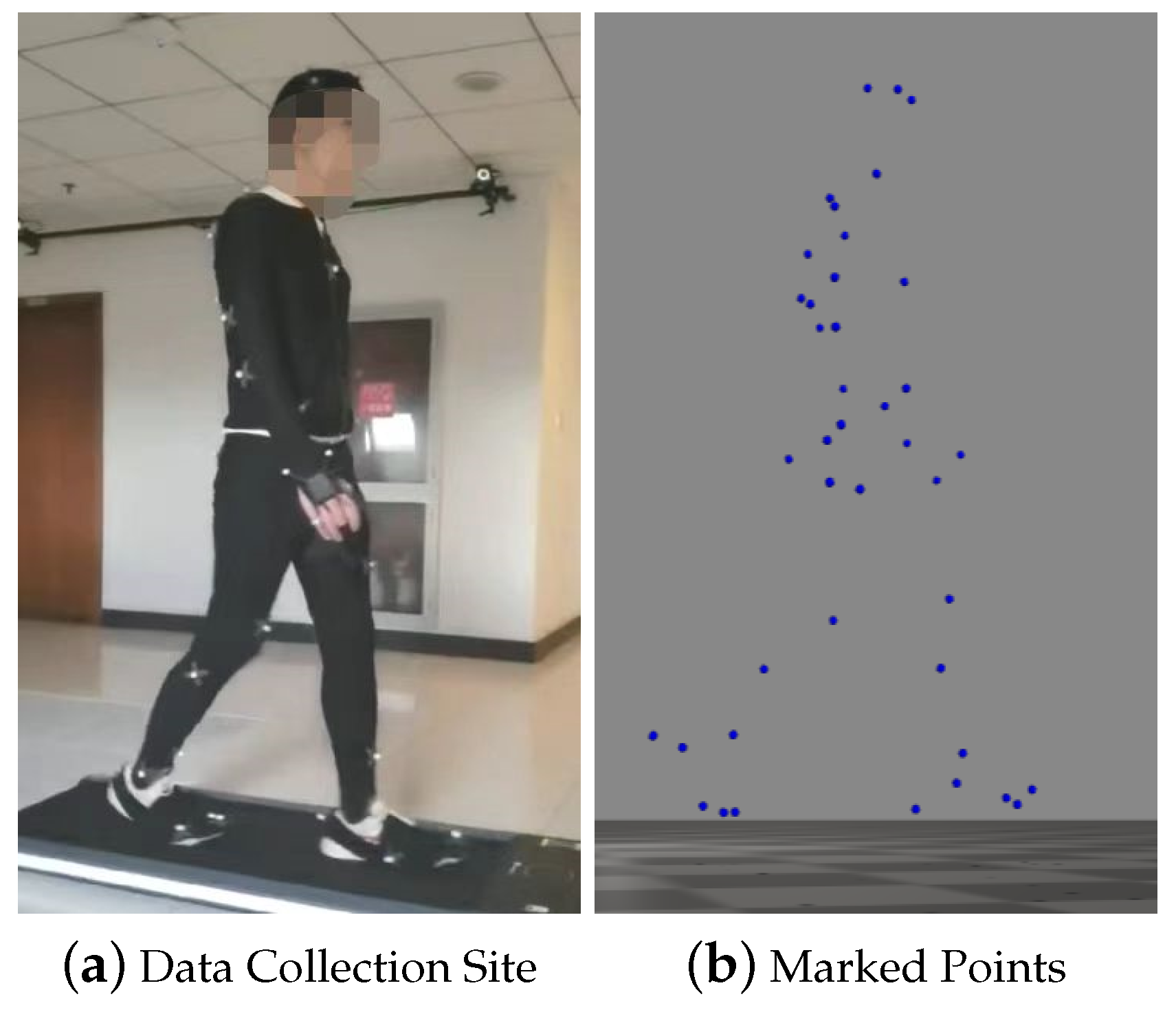
2.2.1. Data Collection
2.2.2. Data Processing
2.3. Bipedal Constraint Algorithm Based on Step Length Model
| Algorithm 1 Bipedal Constraint Algorithm Based on Step Length Model. |
| Require: and measured by bipedal IMUs Ensure: Attitude, speed, and position of bipedal navigation systems SINSl Initial system state and Kalman filter of left foot SINSr Initial system state and Kalman filter of right foot loop if or then Perform the ZUPT algorithm on the foot at zero speed Constrains using the barometer end if if then if then Algorithmically constrains feet in non-zero speed states end if end if end loop |
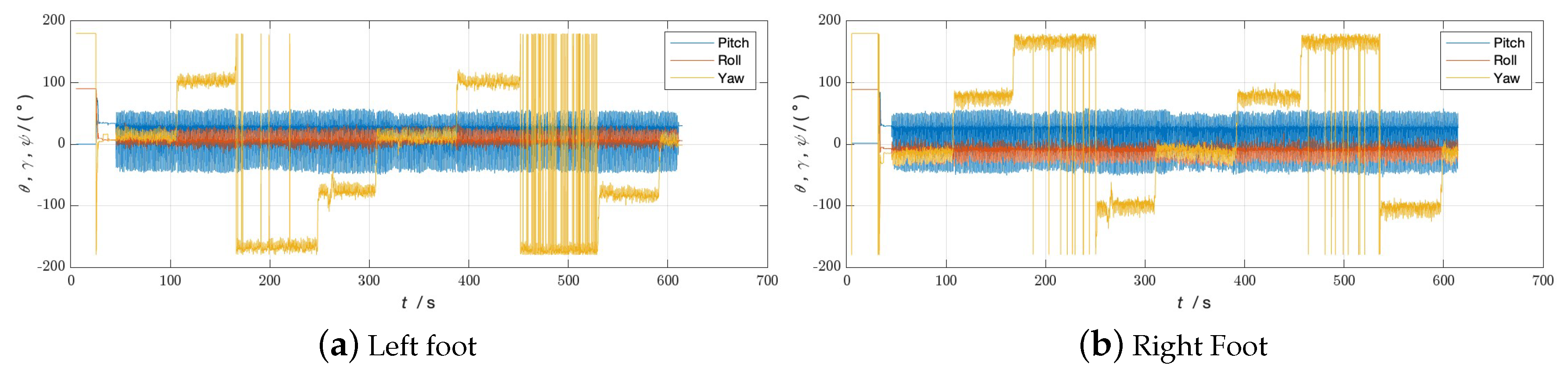
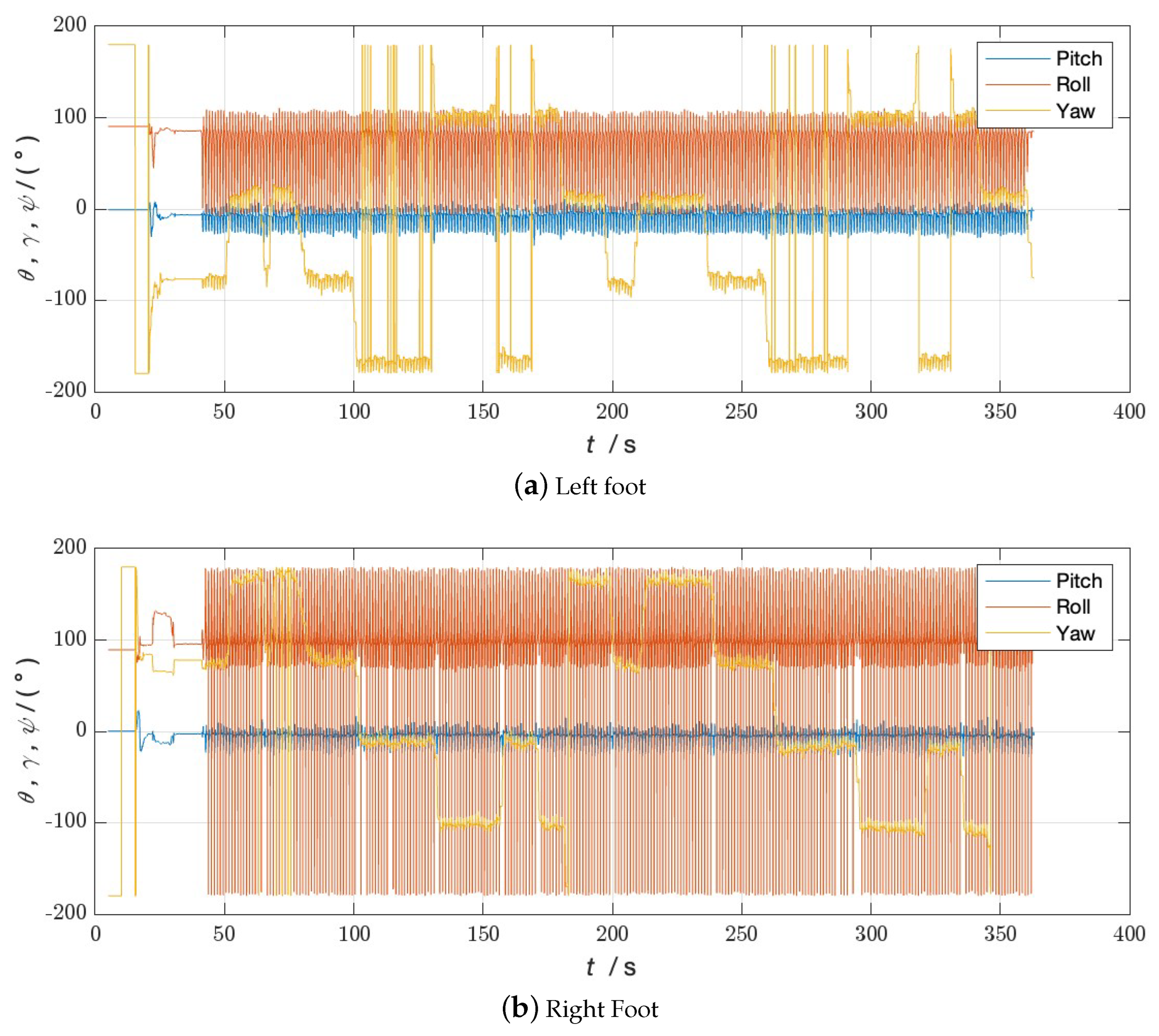
3. Experiment and Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation System |
| KF | Kalman filter |
| ZUPT | Zero Velocity Update |
| PDR | Pedestrian Dead Reckoning |
References
- Jiang, W.; Li, Y.; Rizos, C.; Cai, B.; Shangguan, W. Seamless Indoor-Outdoor Navigation based on GNSS, INS and Terrestrial Ranging Techniques. J. Navig. 2017, 70, 1183–1204. [Google Scholar] [CrossRef]
- Puricer, P.; Kovar, P. Technical Limitations of GNSS Receivers in Indoor Positioning. In Proceedings of the 2007 17th International Conference Radioelektronika, Brno, Czech Republic, 24–25 April 2007; pp. 1–5. [Google Scholar]
- Pan, X.; Mu, H.; Hu, X. A Survey of Autonomous Navigation Technology for Individual Soldier. Navig. Position. Timing 2018, 5, 1–11. [Google Scholar]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef]
- Ju, H.; Lee, J.H.; Park, C.G. Pedestrian Dead Reckoning System Using Dual IMU to Consider Heel Strike Impact. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), Pyeongchang, Republic of Korea, 17–20 October 2018; pp. 1307–1309. [Google Scholar]
- Marth, R.; Levi, R.; Durboraw, I.; Beam, K. The integrated navigation capability for the Force XXI Land Warrior. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium (Cat. No. 98CH36153), Palm Springs, CA, USA, 20–23 April 1996; pp. 193–200. [Google Scholar]
- Yao, Y.; Pan, L.; Fen, W.; Xu, X.; Liang, X.; Xu, X. A Robust Step Detection and Stride Length Estimation for Pedestrian Dead Reckoning Using a Smartphone. IEEE Sens. J. 2020, 20, 9685–9697. [Google Scholar] [CrossRef]
- Basso, M.; Galanti, M.; Innocenti, G.; Miceli, D. Pedestrian Dead Reckoning Based on Frequency Self-Synchronization and Body Kinematics. IEEE Sens. J. 2017, 17, 534–545. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, B.; Huang, P.; Xue, W.; Li, Q.; Zhu, J.; Qiu, L. Kalman Filter-Based Data Fusion of Wi-Fi RTT and PDR for Indoor Localization. IEEE Sens. J. 2021, 21, 8479–8490. [Google Scholar] [CrossRef]
- Edel, M.; Koppe, E. An advanced method for pedestrian dead reckoning using BLSTM-RNNs. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–6. [Google Scholar]
- Lin, J.; Zou, C.; Lan, L.; Gu, S.; An, X. Deep heading estimation for pedestrian dead reckoning. J. Phys. Conf. Ser. 2020, 1656, 012009. [Google Scholar] [CrossRef]
- Luo, Y.; Guo, C.; Su, J.; Guo, W.; Zhang, Q. Learning-Based Complex Motion Patterns Recognition for Pedestrian Dead Reckoning. IEEE Sens. J. 2021, 21, 4280–4290. [Google Scholar] [CrossRef]
- Wang, Q.; Ye, L.; Luo, H.; Men, A.; Zhao, F.; Huang, Y. Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders. Sensors 2019, 19, 840. [Google Scholar] [CrossRef]
- Asraf, O.; Shama, F.; Klein, I. PDRNet: A Deep-Learning Pedestrian Dead Reckoning Framework. IEEE Sens. J. 2022, 22, 4932–4939. [Google Scholar] [CrossRef]
- Klein, I. Smartphone Location Recognition: A Deep Learning-Based Approach. Sensors 2019, 20, 214. [Google Scholar] [CrossRef]
- Klein, I.; Asraf, O. StepNet—Deep Learning Approaches for Step Length Estimation. IEEE Access 2020, 8, 85706–85713. [Google Scholar] [CrossRef]
- Elwell, J. Inertial navigation for the urban warrior. In Proceedings of the SPIE the International Society for Optical Engineering, Orlando, FL, USA, 5–9 April 1999; Volume 3709, pp. 196–204. [Google Scholar]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Borenstein, J.; Ojeda, L.; Kwanmuang, S. Heuristic Reduction of Gyro Drift for Personnel Tracking Systems. J. Navig. 2009, 62, 41–58. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-Velocity Detection—An Algorithm Evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, W.; Shen, Q.; Li, T.; Chang, H. A Handheld Inertial Pedestrian Navigation System with Accurate Step Modes and Device Poses Recognition. IEEE Sens. J. 2014, 15, 1421–1429. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, X.; Cheng, J.; Zhao, Q.; Wang, Y. Improving tightly-coupled model for indoor pedestrian navigation using foot-mounted IMU and UWB measurements. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 23–26 May 2016; pp. 1–5. [Google Scholar]
- Garcia Puyol, M.; Bobkov, D.; Robertson, P.; Jost, T. Pedestrian Simultaneous Localization and Mapping in Multistory Buildings Using Inertial Sensors. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1714–1727. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, R.; Guo, M.; Mi, L.; Song, M.; Zhang, Y. Yaw error self-observation algorithm for pedestrian navigation via foot-mounted inertial navigation system. J. Chin. Inert. Technol. 2015, 23, 457–466. [Google Scholar]
- Qian, W.; Zeng, Q.; Wan, J.; Xiong, Z. Pedestrian navigation method based on kinematic mechanism of human lower limb. J. Chin. Inert. Technol. 2015, 23, 24–28. [Google Scholar]
- Shi, W.; Wang, Y. Dual-MIMU navigation position correction method by inequality constrained Kalman filter. J. Chin. Inert. Technol. 2017, 25, 6. [Google Scholar]
- Shi, W.; Wang, Y.; Shu, J. Error correcting method based on adaptive step-length constraint for dual MIMU pedestrian navigation system. J. Chin. Inert. Technol. 2021, 29, 8. [Google Scholar]
- Xu, Y.; Chen, X.; Wang, Y.; Ma, S. Improved indoor pedestrian navigation method using low-cost foot-mounted AHRS and shoulder-mounted compass. J. Chin. Inert. Technol. 2016, 24, 325–329. [Google Scholar]
- Xu, Y.; Chen, X.; Li, Q.; Tang, J. Indoor pedestrian navigation based on double-IMU framework. J. Chin. Inert. Technol. 2015, 23, 714–717. [Google Scholar]
- Patel, U.N.; Faruque, I.A. Multi-IMU Based Alternate Navigation Frameworks: Performance & Comparison for UAS. IEEE Access 2022, 10, 17565–17577. [Google Scholar]
- Niu, X.; Li, Y.; Kuang, J.; Zhang, P. Fusing the Data of Dual Foot-Mounted INS Based on a Heuristic Equality Constraint. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–7. [Google Scholar]
- Niu, X.; Li, Y.; Kuang, J.; Zhang, P. Data Fusion of Dual Foot-Mounted IMU for Pedestrian Navigation. IEEE Sens. J. 2019, 19, 4577–4584. [Google Scholar] [CrossRef]
- Li, J.; Zhou, G.; Liu, X.; Guan, J.; Cheng, Z. Dual MIMU Pedestrian Navigation Scheme Based on Equality Constraint Kalman Filtering. Piezoelectrics Acoustooptics 2015, 37, 237–241. [Google Scholar]
- Prateek, G.V.; Girisha, R.; Hari, K.V.S.; Handel, P. Data Fusion of Dual Foot-Mounted INS to Reduce the Systematic Heading Drift. In Proceedings of the 2013 4th International Conference on Intelligent Systems, Modelling and Simulation, Bangkok, Thailand, 29–31 January 2013; pp. 208–213. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Sex | Height/cm | Load/kg |
|---|---|---|---|
| 1 | Male | 165 | 0, 10, 15 |
| 2 | Male | 170 | 0, 10, 15 |
| 3 | Male | 175 | 0, 10, 15 |
| 4 | Male | 180 | 0, 10, 15 |
| 5 | Male | 185 | 0, 10, 15 |
| 6 | Male | 190 | 0, 10, 15 |
| 7 | Female | 158 | 0, 5 |
| 8 | Female | 165 | 0, 5 |
| 9 | Female | 170 | 0, 5 |
| 10 | Female | 175 | 0, 5 |
| Specification | Barometer | Accelerometer | Gyroscope |
|---|---|---|---|
| Full scale | 1260 hpa | ±16 g | ±4000 dps |
| Bias stability | - | - | 3 deg/h |
| Noise | 0.75 | 60 | 5 |
| Temperature | −40∼+85 °C | −40∼+105 °C | |
| Experiment | Radial Error without Algorithm (m) | Radial Error with Algorithm (m) | Improvement | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Left Foot | Right Foot | Mean | Left Foot | Right Foot | Mean | Left Foot | Right Foot | Mean | |
| Walk 1 | 9.3999 | 7.9166 | 8.6583 | 4.4108 | 1.1022 | 2.7565 | |||
| Walk 2 | 1.8467 | 3.6703 | 2.7585 | 0.7231 | 2.0017 | 1.3624 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Liu, G.; Guo, M. Data Fusion of Dual Foot-Mounted INS Based on Human Step Length Model. Sensors 2024, 24, 1073. https://doi.org/10.3390/s24041073
Chen J, Liu G, Guo M. Data Fusion of Dual Foot-Mounted INS Based on Human Step Length Model. Sensors. 2024; 24(4):1073. https://doi.org/10.3390/s24041073
Chicago/Turabian StyleChen, Jianqiang, Gang Liu, and Meifeng Guo. 2024. "Data Fusion of Dual Foot-Mounted INS Based on Human Step Length Model" Sensors 24, no. 4: 1073. https://doi.org/10.3390/s24041073