
Blast-Assisted Subsurface Characterisation Using a Novel Distributed Acoustic Sensing Setup Based on Geometric Phases

Abstract
:1. Introduction
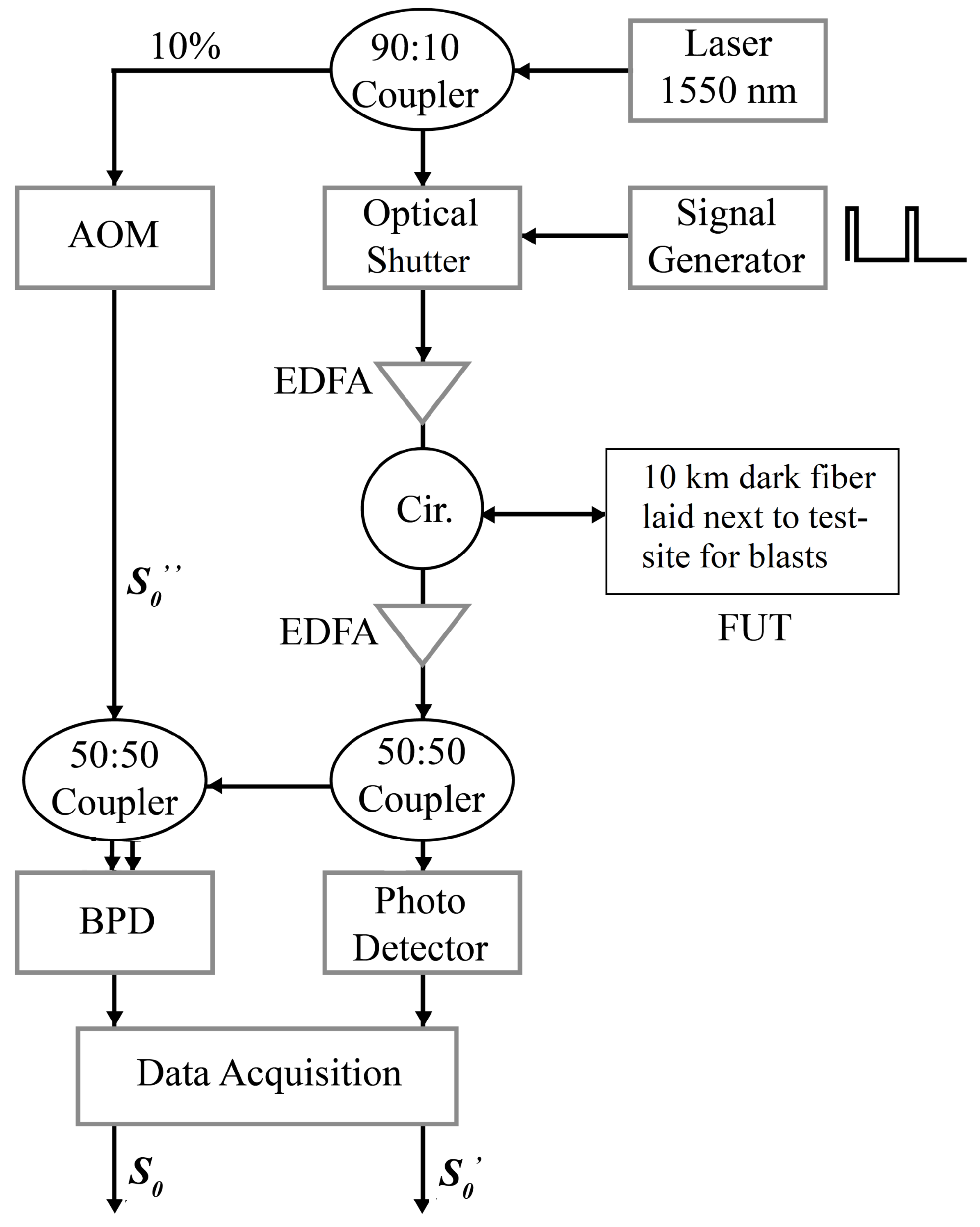
2. Experimental Setup
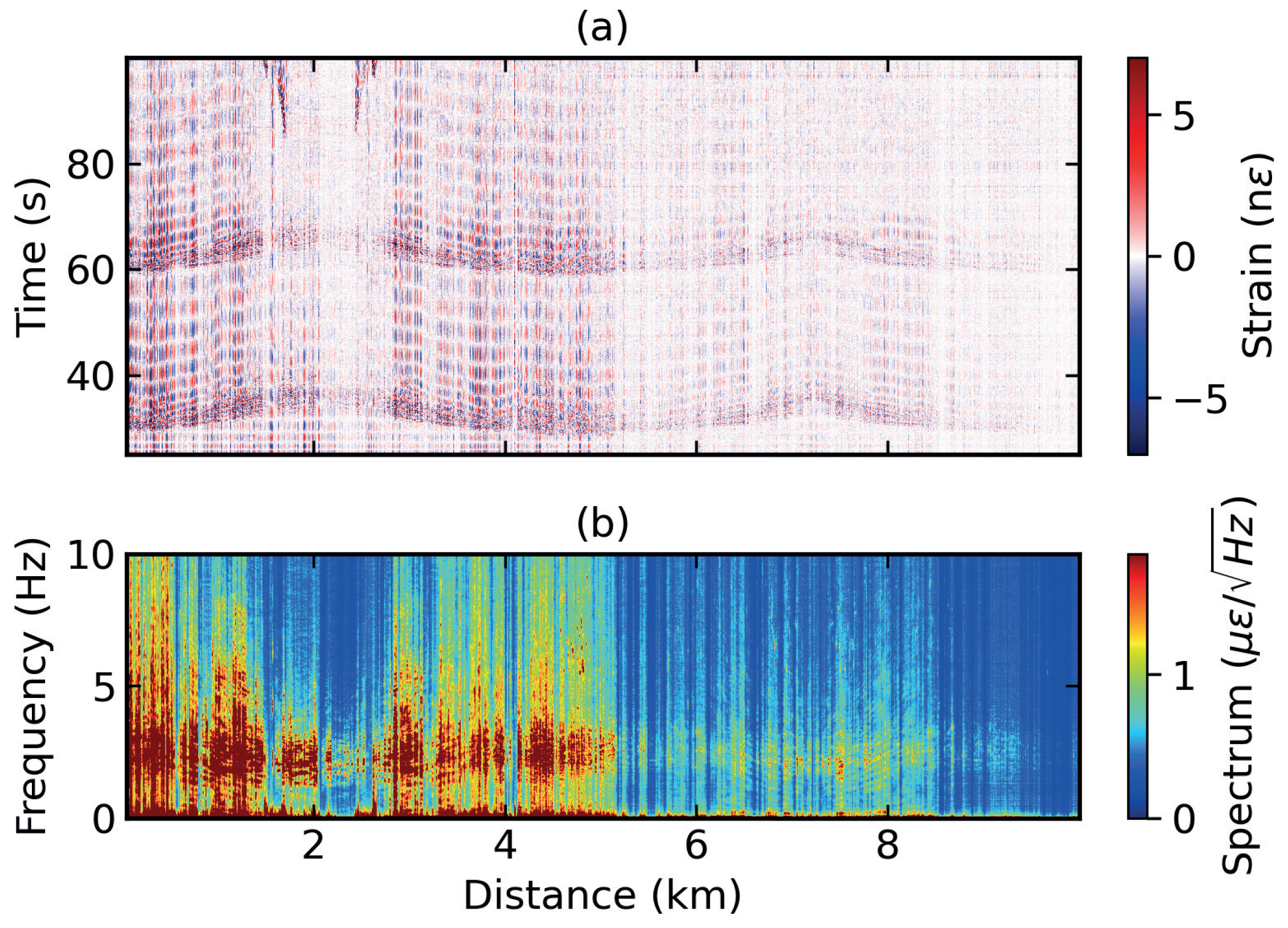
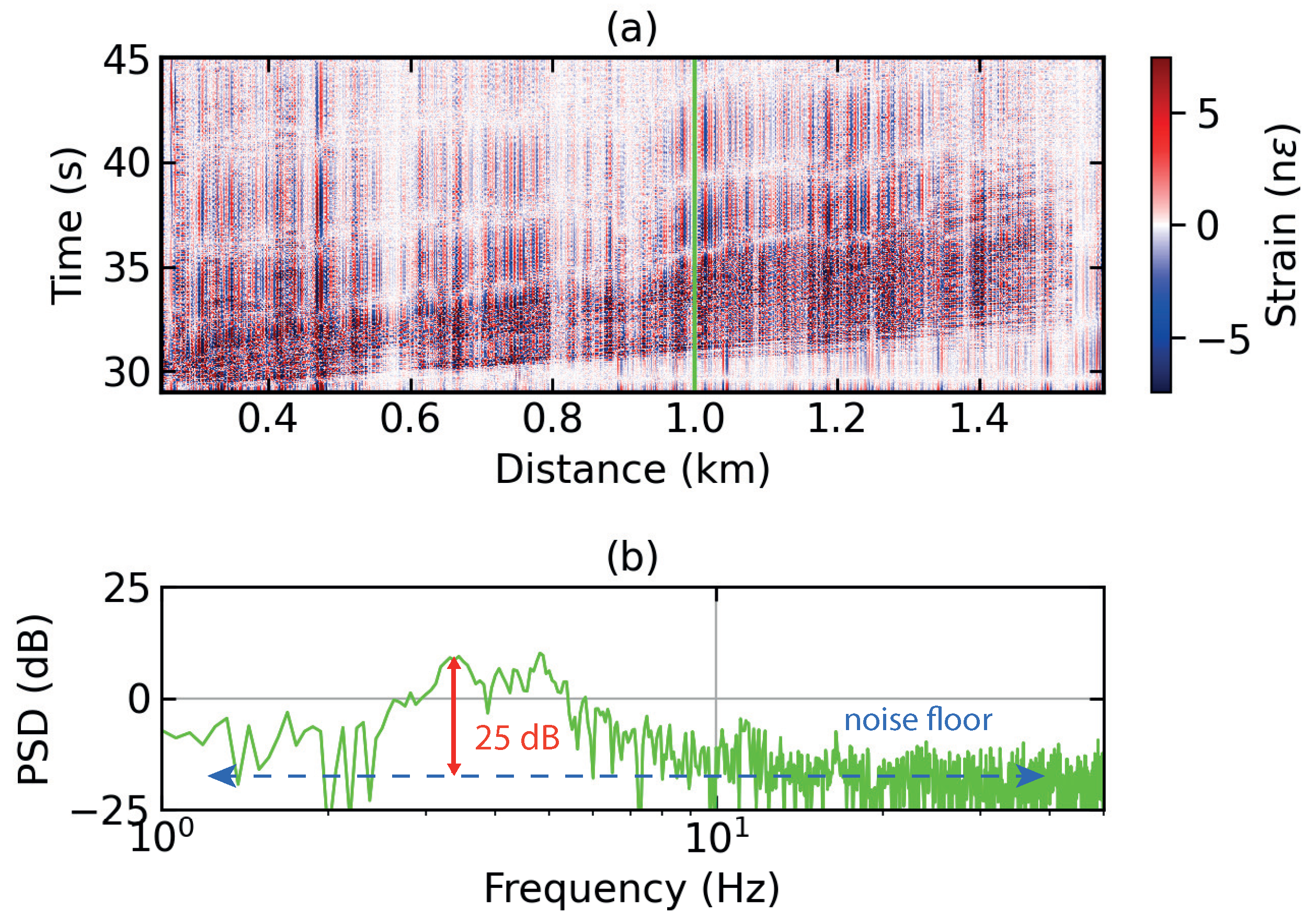
3. Experimental Data
4. Analysis and Results
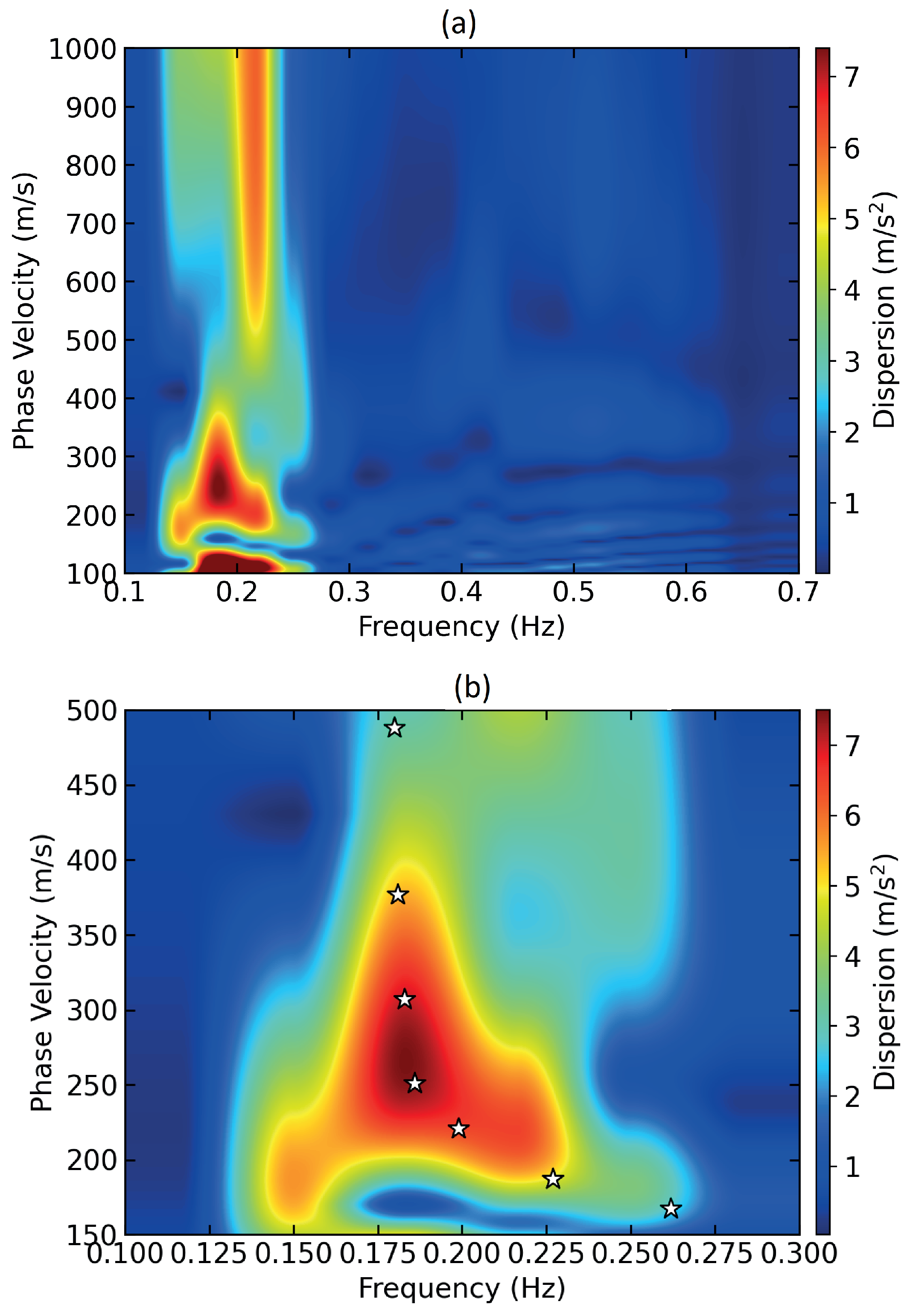
4.1. Dispersion Image Extraction
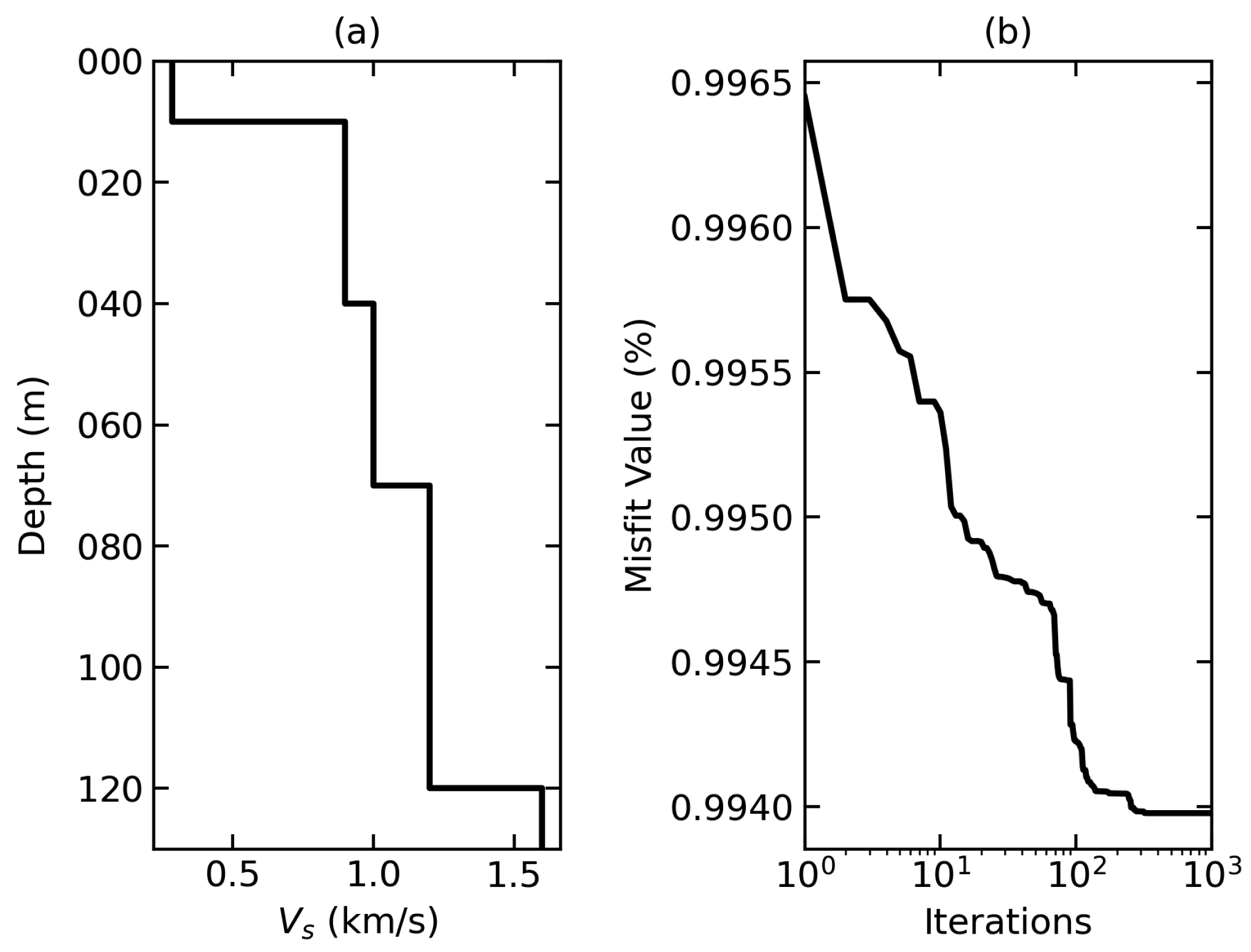
4.2. Dispersion Curve Inversion
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AOM | Acousto-optic Modulator |
| BPD | Balanced Photodetector |
| Cir. | Circulator |
| CPSO | Competitive Particle Swarm Optimisation |
| DAS | Distributed Acoustic Sensing |
| EDFA | Erbium Doped Fiber Amplifier |
| FUT | Fiber-under-Test |
| LO | Local Oscillator |
| OTDR | Optical Time-Domain Reflectometry |
| PSD | Power Spectral Density |
| RBS | Rayleigh Backscatter |
| SNR | Signal-to-Noise Ratio |
| SOP | State of Polarization |
References
- Everett, M.E. Near-Surface Applied Geophysics; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar] [CrossRef]
- Mackay-Champion, T. Using noise to examine Earth’s interior. Nat. Rev. Earth Environ. 2022, 3, 222. [Google Scholar] [CrossRef]
- Nthaba, B.; Ikeda, T.; Nimiya, H.; Tsuji, T.; Iio, Y. Ambient noise tomography for a high-resolution 3D S-wave velocity model of the Kinki Region, Southwestern Japan, using dense seismic array data. Earth Planets Space 2022, 74, 96. [Google Scholar] [CrossRef]
- Zhou, C.; Xia, J.; Zhang, H.; Pang, J.; Liu, Y.; Xi, C.; Ning, L.; Mi, B.; Xing, H.; Chang, X. Urban near-surface imaging from ambient noise tomography using dense seismic networks. IOP Conf. Ser. Earth Environ. Sci. 2021, 660, 012058. [Google Scholar] [CrossRef]
- Snieder, R.; Wapenaar, K. Imaging with ambient noise. Phys. Today 2010, 63, 44–49. [Google Scholar] [CrossRef]
- Lasocki, S.; Orlecka-Sikora, B. Anthropogenic Seismicity Related to Exploitation of Georesources. In Encyclopedia of Solid Earth Geophysics; Gupta, H.K., Ed.; Encyclopedia of Earth Sciences Series; Springer International Publishing: Cham, Switzerland, 2021; pp. 8–15. [Google Scholar] [CrossRef]
- Nimiya, H.; Ikeda, T.; Tsuji, T. Temporal changes in anthropogenic seismic noise levels associated with economic and leisure activities during the COVID-19 pandemic. Sci. Rep. 2021, 11, 20439. [Google Scholar] [CrossRef] [PubMed]
- Groos, J.C.; Ritter, J.R.R. Time domain classification and quantification of seismic noise in an urban environment. Geophys. J. Int. 2009, 179, 1213–1231. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, Y.; Jin, G.; Chen, X.; Zhan, G.; Wang, B.; Zeng, X. Editorial: Advances and applications of distributed optical fiber sensing (DOFS) in multi-scales geoscience problems. Front. Earth Sci. 2023, 10, 1126105. [Google Scholar] [CrossRef]
- He, Z.; Liu, Q. Optical Fiber Distributed Acoustic Sensors: A Review. J. Light. Technol. 2021, 39, 3671–3686. [Google Scholar] [CrossRef]
- Shang, Y.; Sun, M.; Wang, C.; Yang, J.; Du, Y.; Yi, J.; Zhao, W.; Wang, Y.; Zhao, Y.; Ni, J. Research Progress in Distributed Acoustic Sensing Techniques. Sensors 2022, 22, 6060. [Google Scholar] [CrossRef]
- Lior, I.; Mercerat, E.D.; Rivet, D.; Sladen, A.; Ampuero, J. Imaging an Underwater Basin and Its Resonance Modes Using Optical Fiber Distributed Acoustic Sensing. Seismol. Res. Lett. 2022, 93, 1573–1584. [Google Scholar] [CrossRef]
- Williams, E.F.; Zhan, Z.; Martins, H.F.; Fernández-Ruiz, M.R.; Martín-López, S.; González-Herráez, M.; Callies, J. Surface Gravity Wave Interferometry and Ocean Current Monitoring with Ocean-Bottom DAS. J. Geophys. Res. Ocean. 2022, 127, e2021JC018375. [Google Scholar] [CrossRef]
- Shao, J.; Wang, Y.; Zheng, Y.; Yao, Y.; Wu, S.; Yang, Z.; Xue, Q. Near-surface characterization using urban traffic noise recorded by fiber-optic distributed acoustic sensing. Front. Earth Sci. 2022, 10, 943424. [Google Scholar] [CrossRef]
- Song, Z.; Zeng, X.; Chi, B.; Bao, F.; Osotuyi, A.G. Using the three-station interferometry method to improve urban DAS ambient noise tomography. Front. Earth Sci. 2022, 10, 952410. [Google Scholar] [CrossRef]
- Spica, Z.J.; Perton, M.; Martin, E.R.; Beroza, G.C.; Biondi, B. Urban Seismic Site Characterization by Fiber-Optic Seismology. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018656. [Google Scholar] [CrossRef]
- Fang, G.; Li, Y.E.; Zhao, Y.; Martin, E.R. Urban Near-Surface Seismic Monitoring Using Distributed Acoustic Sensing. Geophys. Res. Lett. 2020, 47, e2019GL086115. [Google Scholar] [CrossRef]
- Lindsey, N.J.; Yuan, S.; Lellouch, A.; Gualtieri, L.; Lecocq, T.; Biondi, B. City-Scale Dark Fiber DAS Measurements of Infrastructure Use during the COVID-19 Pandemic. Geophys. Res. Lett. 2020, 47, e2020GL089931. [Google Scholar] [CrossRef] [PubMed]
- Dou, S.; Lindsey, N.; Wagner, A.M.; Daley, T.M.; Freifeld, B.; Robertson, M.; Peterson, J.; Ulrich, C.; Martin, E.R.; Ajo-Franklin, J.B. Distributed Acoustic Sensing for Seismic Monitoring of The Near Surface: A Traffic-Noise Interferometry Case Study. Sci. Rep. 2017, 7, 11620. [Google Scholar] [CrossRef]
- Ajo-Franklin, J.B.; Dou, S.; Lindsey, N.J.; Monga, I.; Tracy, C.; Robertson, M.; Rodriguez Tribaldos, V.; Ulrich, C.; Freifeld, B.; Daley, T.; et al. Distributed Acoustic Sensing Using Dark Fiber for Near-Surface Characterization and Broadband Seismic Event Detection. Sci. Rep. 2019, 9, 1328. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, J.; Zhang, H.; Xu, T.; Deng, D.; Geng, J. Revealing the shallow soil structure of the Yigong Lake in the Tibetan Plateau using a portable distributed acoustic sensing interrogator. Front. Earth Sci. 2023, 10, 1018116. [Google Scholar] [CrossRef]
- Walter, F.; Gräff, D.; Lindner, F.; Paitz, P.; Köpfli, M.; Chmiel, M.; Fichtner, A. Distributed acoustic sensing of microseismic sources and wave propagation in glaciated terrain. Nat. Commun. 2020, 11, 2436. [Google Scholar] [CrossRef]
- Fernandez-Ruiz, M.R.; Martins, H.F.; Williams, E.F.; Becerril, C.; Magalhaes, R.; Costa, L.; Martin-Lopez, S.; Jia, Z.; Zhan, Z.; Gonzalez-Herraez, M. Seismic Monitoring with Distributed Acoustic Sensing From the Near-Surface to the Deep Oceans. J. Light. Technol. 2022, 40, 1453–1463. [Google Scholar] [CrossRef]
- Ip, E.; Ravet, F.; Martins, H.; Huang, M.F.; Okamoto, T.; Han, S.; Narisetty, C.; Fang, J.; Huang, Y.K.; Salemi, M.; et al. Using Global Existing Fiber Networks for Environmental Sensing. Proc. IEEE 2022, 110, 1853–1888. [Google Scholar] [CrossRef]
- Fernández-Ruiz, M.R.; Soto, M.A.; Williams, E.F.; Martin-Lopez, S.; Zhan, Z.; Gonzalez-Herraez, M.; Martins, H.F. Distributed acoustic sensing for seismic activity monitoring. APL Photonics 2020, 5, 030901. [Google Scholar] [CrossRef]
- Pan, Z.; Liang, K.; Ye, Q.; Cai, H.; Qu, R.; Fang, Z. Phase-sensitive OTDR system based on digital coherent detection. In Proceedings of the 2011 Asia Communications and Photonics Conference and Exhibition (ACP), Shanghai, China, 13–16 November 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Kaminow, I.P. Polarization in optical fibers. IEEE J. Quantum Electron. 1981, 17, 15–22. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, C.; Wu, H.; Tang, M. Fading-free polarization-sensitive optical fiber sensing. In Proceedings of the Optical Fiber Sensors Conference 2020 Special Edition (2020), Washington, DC, USA, 8–12 June 2020; p. W4.69. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, C.; Wu, H.; Liao, R.; Shen, L.; Chen, W.; Tang, M. 45° aligned dual-polarizer for the suppression of signal fading in polarization OTDR. Appl. Opt. 2021, 60, 1603–1608. [Google Scholar] [CrossRef] [PubMed]
- Zabihi, M.; Chen, Y.; Zhou, T.; Liu, J.; Shan, Y.; Meng, Z.; Wang, F.; Zhang, Y.; Zhang, X.; Chen, M. Continuous Fading Suppression Method for ϕ-OTDR Systems Using Optimum Tracking Over Multiple Probe Frequencies. J. Light. Technol. 2019, 37, 3602–3610. [Google Scholar] [CrossRef]
- Yu, Z.; Lu, Y.; Hu, X.; Meng, Z. Polarization dependence of the noise of phase measurement based on phase-sensitive OTDR. J. Opt. 2017, 19, 125602. [Google Scholar] [CrossRef]
- Ren, M.; Lu, P.; Chen, L.; Bao, X. Theoretical and Experimental Analysis of Φ-OTDR Based on Polarization Diversity Detection. IEEE Photonics Technol. Lett. 2016, 28, 697–700. [Google Scholar] [CrossRef]
- Kersey, A.D.; Marrone, M.J.; Dandridge, A. Polarization diversity detection for fiber interferometers using active feedback control of output polarization-mode selection. Opt. Lett. 1990, 15, 1315. [Google Scholar] [CrossRef]
- Pang, F.; He, M.; Liu, H.; Mei, X.; Tao, J.; Zhang, T.; Zhang, X.; Chen, N.; Wang, T. A Fading-Discrimination Method for Distributed Vibration Sensor Using Coherent Detection of phi-OTDR. IEEE Photonics Technol. Lett. 2016, 28, 2752–2755. [Google Scholar] [CrossRef]
- Hannonen, A.; Saastamoinen, K.; Leppänen, L.P.; Koivurova, M.; Shevchenko, A.; Friberg, A.T.; Setälä, T. Geometric phase in beating of light waves. New J. Phys. 2019, 21, 083030. [Google Scholar] [CrossRef]
- Shaheen, S.; Hicke, K. Geometric phase in distributed fiber optic sensing. Opt. Lett. 2022, 47, 3932. [Google Scholar] [CrossRef] [PubMed]
- Shaheen, S.; Hicke, K.; Krebber, K. Phase-sensitive optical time domain reflectometry based on geometric phase measurement. Sci. Rep. 2023, 13, 2862. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Krebber, K. Phase error analysis and unwrapping error suppression in phase-sensitive optical time domain reflectometry. Opt. Express 2022, 30, 6934. [Google Scholar] [CrossRef] [PubMed]
- Reamer, S.K.; Hinzen, K.G.; Stump, B.W. Near-source characterization of the seismic wavefield radiated from quarry blasts. Geophys. J. Int. 1992, 110, 435–450. [Google Scholar] [CrossRef]
- Martin, E.R. Passive Imaging and Characterisation of the Subsurface with Distributed Acoustic Sensing. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2018. [Google Scholar]
- Luu, K.; Noble, M.; Gesret, A.; Belayouni, N.; Roux, P.F. A parallel competitive Particle Swarm Optimization for non-linear first arrival traveltime tomography and uncertainty quantification. Comput. Geosci. 2018, 113, 81–93. [Google Scholar] [CrossRef]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed Vibration Sensor Based on Coherent Detection of Phase-OTDR. J. Light. Technol. 2010, 28, 3243–3249. [Google Scholar] [CrossRef]
- Tu, G.; Zhang, X.; Zhang, Y.; Zhu, F.; Xia, L.; Nakarmi, B. The Development of an Φ-OTDR System for Quantitative Vibration Measurement. IEEE Photonics Technol. Lett. 2015, 27, 1349–1352. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Wang, S.; Xue, N.; Peng, F.; Fan, M.; Sun, W.; Qian, X.; Rao, J.; Rao, Y. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt. Express 2016, 24, 853–858. [Google Scholar] [CrossRef]
- Tribaldos, V.R.; Ajo-Franklin, J.B.; Dou, S.; Lindsey, N.J.; Ulrich, C.; Robertson, M.; Freifeld, B.M.; Daley, T.; Monga, I.; Tracy, C. Surface Wave Imaging Using Distributed Acoustic Sensing Deployed on Dark Fiber. In Distributed Acoustic Sensing in Geophysics; American Geophysical Union (AGU): Washington, DC, USA, 2021; Chapter 15; pp. 197–212. [Google Scholar] [CrossRef]
- Wapenaar, K.; Fokkema, J. Green’s function representations for seismic interferometry. Geophysics 2006, 71, SI33–SI46. [Google Scholar] [CrossRef]
- Stoffa, P.L.; Diebold, J.B.; Buhl, P. Inversion of seismic data in the τ-p plane. Geophys. Res. Lett. 1981, 8, 869–872. [Google Scholar] [CrossRef]
- Kielczynski, P. Properties and Applications of Love Surface Waves in Seismology and Biosensors. In Surface Waves—New Trends and Developments; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Luu, K. evodcinv: Inversion of Dispersion Curves Using Evolutionary Algorithms. 2021. Available online: https://zenodo.org/records/5775743 (accessed on 20 March 2023).
- Näsholm, S.P.; Iranpour, K.; Wuestefeld, A.; Dando, B.D.E.; Baird, A.F.; Oye, V. Array Signal Processing on Distributed Acoustic Sensing Data: Directivity Effects in Slowness Space. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023587. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer No. | Min. Thickness (m) | Max. Thickness (m) | Min. Velocity (m/s) | Max. Velocity (m/s) |
|---|---|---|---|---|
| 1 | 10 | 60 | 250 | 700 |
| 2 | 30 | 100 | 300 | 900 |
| 3 | 30 | 100 | 400 | 1000 |
| 4 | 50 | 100 | 600 | 1200 |
| 5 | 50 | 100 | 900 | 1600 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaheen, S.; Hicke, K.; Krebber, K. Blast-Assisted Subsurface Characterisation Using a Novel Distributed Acoustic Sensing Setup Based on Geometric Phases. Sensors 2024, 24, 30. https://doi.org/10.3390/s24010030
Shaheen S, Hicke K, Krebber K. Blast-Assisted Subsurface Characterisation Using a Novel Distributed Acoustic Sensing Setup Based on Geometric Phases. Sensors. 2024; 24(1):30. https://doi.org/10.3390/s24010030
Chicago/Turabian StyleShaheen, Sabahat, Konstantin Hicke, and Katerina Krebber. 2024. "Blast-Assisted Subsurface Characterisation Using a Novel Distributed Acoustic Sensing Setup Based on Geometric Phases" Sensors 24, no. 1: 30. https://doi.org/10.3390/s24010030