

Quasi-Zero Stiffness Vibration Sensing and Energy Harvesting Integration Based on Buckled Piezoelectric Euler Beam

Abstract
:1. Introduction
2. Mathematical Modeling
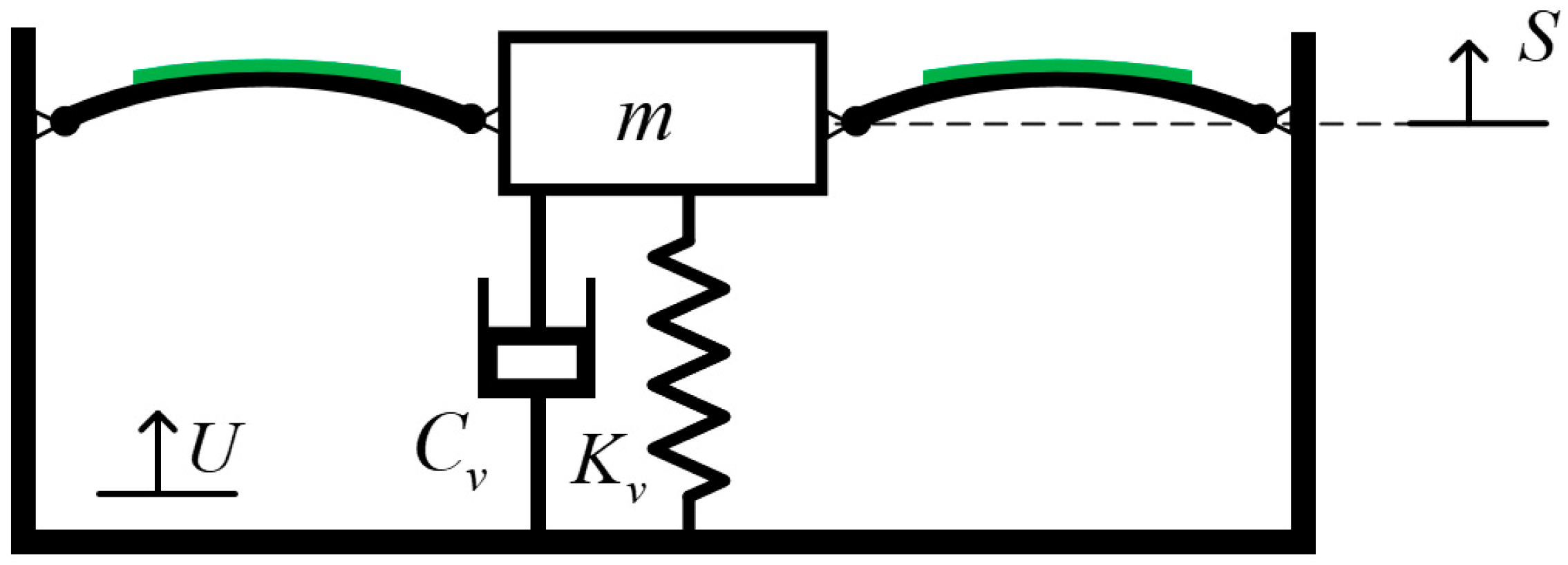
2.1. Structure of the Sensor System
2.2. Modeling of the Sensor System
2.2.1. Modeling of the BPEB
2.2.2. Dynamic Modeling of the Integrated System
3. Dynamic Response
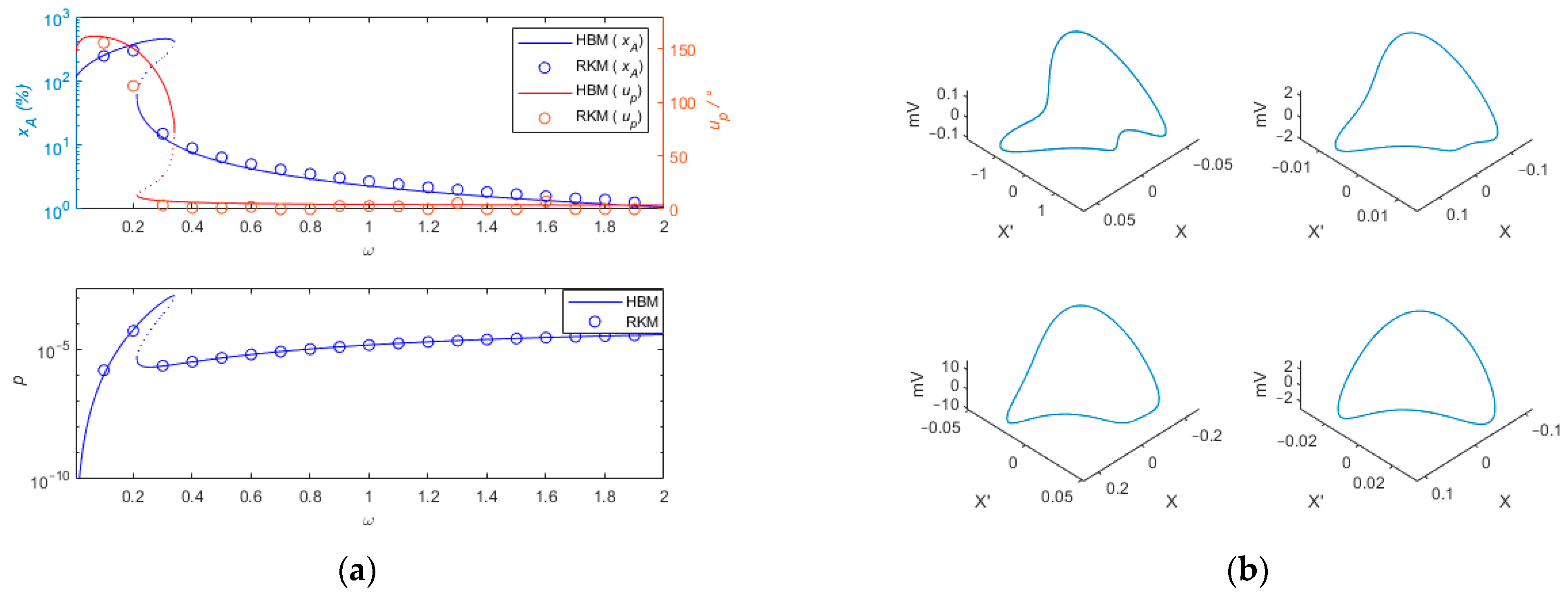
3.1. Performance Analysis
3.2. Influence of Difference Structural Parameters
3.3. Comparison with Different Quasi-Zero Stiffness Vibration Sensing Systems
3.4. Time-Domain Simulation
3.4.1. Single-Frequency Excitation
3.4.2. Periodic Excitation
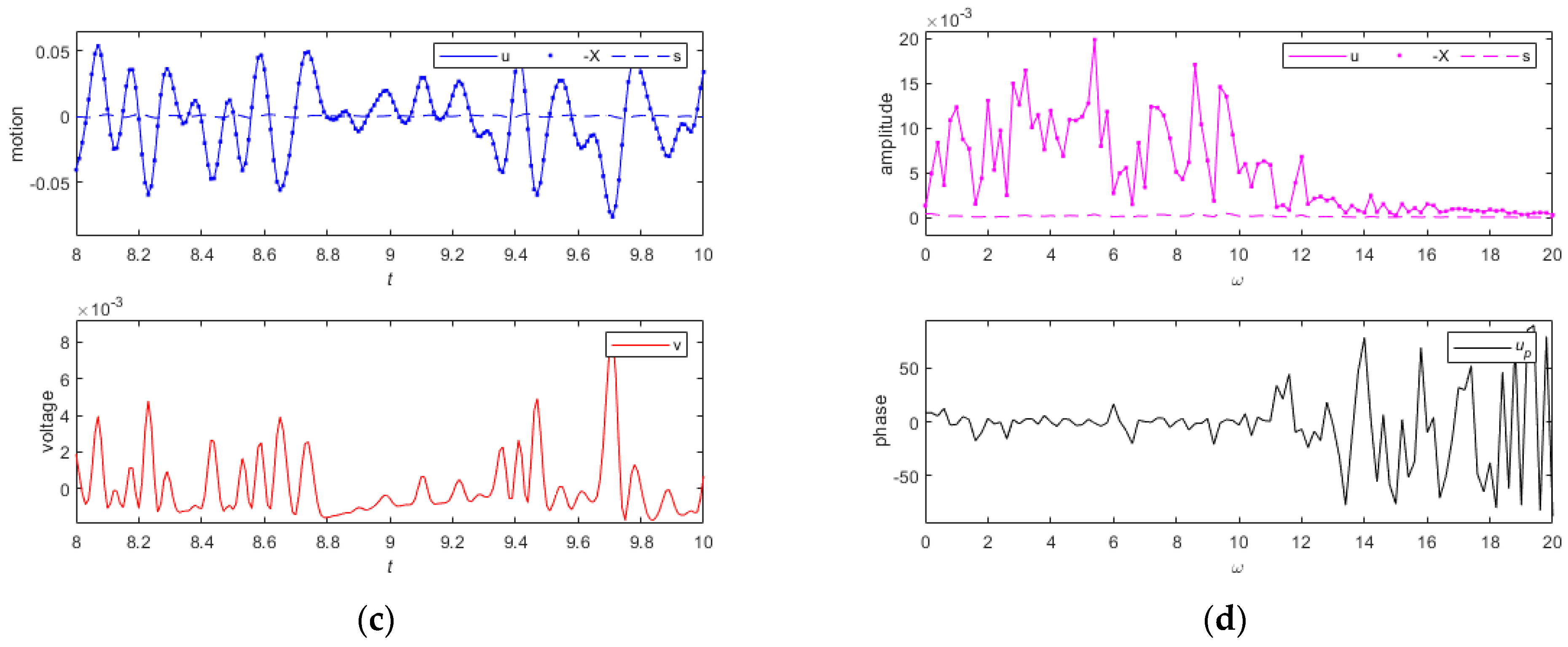
3.4.3. Random Excitation
4. Conclusions
- The system utilizes quasi-zero stiffness vibration sensing technology, which enables the measurement of the absolute vibration displacement of the tested object under small excitation. Moreover, the electrical energy harvested by the system can be used to power low-power components or provide partial power, providing an alternative approach for wireless applications.
- Increasing the electromechanical coupling coefficient can reduce the peak value of the measurement error. The higher the damping ratio, the smaller the peak of output power, the smaller the peak of measurement error in the low-frequency range, and the higher the accuracy of the sensing system. However, at high frequencies, the amplitude of measurement error may increase. A larger amplitude of the tested object results in a higher output power of the system, but it may also decrease the accuracy of the sensing system.
- The quasi-zero stiffness piezoelectric Euler beam vibration sensing system effectively suppresses frequency jumping phenomena and significantly improves measurement performance in the high-frequency range by using a small damping ratio and a large force–electric coupling coefficient. This flexible parameter adjustment capability allows the system to demonstrate good performance in various operating conditions and applications, resulting in more accurate and reliable measurement results. Compared with the three-spring structure and roller cam structure, the vibration sensor of the Euler beam structure can achieve a wider measurement frequency band and better measurement performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Jing, X.; Daley, S.; Li, F. Recent advances in micro-vibration isolation. Mech. Syst. Signal Process. 2015, 56, 55–80. [Google Scholar] [CrossRef]
- Den, H.J.P. Mechanical Vibrations; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Zhang, C.; Mei, D.; Chen, Z. Active vibration isolation of a micro-manufacturing platform based on a neural network. J. Mater. Process. Technol. 2002, 129, 634–639. [Google Scholar] [CrossRef]
- Beijen, M.A.; Tjepkema, D.; van Dijk, J. Two-sensor control in active vibration isolation using hard mounts. Control Eng. Pract. 2014, 26, 82–90. [Google Scholar] [CrossRef]
- Zhu, X.; Jing, X.; Cheng, L. Magnetorheological fluid dampers: A review on structure design and analysis. J. Intell. Mater. Syst. Struct. 2012, 23, 839–873. [Google Scholar] [CrossRef]
- Sun, X.; Jing, X.; Xu, J.; Cheng, L. A Quasi-Zero-Stiffness-Based Sensor System in Vibration Measurement. IEEE Trans. Ind. Electron. 2014, 61, 5606–5614. [Google Scholar]
- Sun, X.; Jing, X.; Cheng, L.; Xu, J. A 3-D Quasi-Zero-Stiffness-Based Sensor System for Absolute Motion Measurement and Application in Active Vibration Control. IEEE/ASME Trans. Mechatron. 2015, 20, 254–262. [Google Scholar] [CrossRef]
- Molyneux, W.G. The support of an aircraft for ground resonance tests: A survey of available methods. Aircr. Eng. Aerosp. Technol. 1958, 30, 160–166. [Google Scholar] [CrossRef]
- Kocak, K.; Yilmaz, C. Design of a compliant lever-type passive vibration isolator with quasi-zero-stiffness mechanism. J. Sound Vib. 2023, 558, 117758. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, S.; Wang, B.; Zhuang, X.; Lin, F. The research about application of quasi-zero stiffness vibration isolation technology in a large vehicle-mounted optic-electronic equipment. Ain Shams Eng. J. 2023, 14, 101841. [Google Scholar] [CrossRef]
- Yan, B.; Yu, N.; Wang, Z.; Wu, C.; Wang, S.; Zhang, W. Lever-type quasi-zero stiffness vibration isolator with magnetic spring. J. Sound Vib. 2022, 527, 116865. [Google Scholar] [CrossRef]
- Fulcher, B.A.; Shahan, D.W.; Haberman, M.R.; Conner Seepersad, C.; Wilson, P.S. Analytical and experimental investigation of buckled beams as negative stiffness elements for passive vibration and shock isolation systems. J. Vib. Acoust. 2014, 136, 031009. [Google Scholar] [CrossRef]
- Kashdan, L.; Seepersad, C.C.; Haberman, M.; Wilson, P.S. Design, fabrication, and evaluation of negative stiffness elements using SLS. Rapid Prototyp. J. 2012, 18, 194–200. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, J.; Chang, Y.; Ouyang, H.; Xu, D.; Yang, Y. A nonlinear ultra-low-frequency vibration isolator with dual quasi-zero-stiffness mechanism. Nonlinear Dyn. 2020, 101, 755–773. [Google Scholar] [CrossRef]
- Xu, D.; Yu, Q.; Zhou, J.; Bishop, S.R. Theoretical and experimental analyses of a nonlinear magnetic vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 2013, 332, 3377–3389. [Google Scholar] [CrossRef]
- Ye, K.; Ji, J.C.; Brown, T. Design of a quasi-zero stiffness isolation system for supporting different loads. J. Sound Vib. 2020, 471, 115198. [Google Scholar] [CrossRef]
- Zhou, N.; Liu, K. A tunable high-static–low-dynamic stiffness vibration isolator. J. Sound Vib. 2010, 329, 1254–1273. [Google Scholar] [CrossRef]
- Sun, Y.; Zhao, J.; Wang, M.; Sun, Y.; Pu, H.; Luo, J.; Peng, Y.; Xie, S.; Yang, Y. High-static–low-dynamic stiffness isolator with tunable electromagnetic mechanism. IEEE/ASME Trans. Mechatron. 2019, 25, 316–326. [Google Scholar] [CrossRef]
- Tuo, J.; Deng, Z.; Huang, W.; Zhang, H. A six degree of freedom passive vibration isolator with quasi-zero-stiffness-based supporting. J. Low Freq. Noise Vib. Act. Control 2018, 37, 279–294. [Google Scholar] [CrossRef]
- Kim, W.G.; Kim, D.W.; Tcho, I.W.; Kim, J.K.; Kim, M.S.; Choi, Y.K. Triboelectric nanogenerator: Structure, mechanism, and applications. Acs Nano 2021, 15, 258–287. [Google Scholar] [CrossRef]
- Zhai, L.; Gao, L.; Wang, Z.; Dai, K.; Wu, S.; Mu, X. An energy harvester coupled with a triboelectric mechanism and electrostatic mechanism for biomechanical energy harvesting. Nanomaterials 2022, 12, 933. [Google Scholar] [CrossRef]
- Kumar, S.; Singh, D.; Kumar, R.; Jain, S.C. No-wear vibration energy harvester based on a triboelectric mechanism. J. Electron. Mater. 2021, 50, 7057–7070. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-performance piezoelectric energy harvesters and their applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef]
- Gao, M.; Wang, Y.; Wang, Y.; Wang, P. Experimental investigation of non-linear multi-stable electromagnetic-induction energy harvesting mechanism by magnetic levitation oscillation. Appl. Energy 2018, 220, 856–875. [Google Scholar] [CrossRef]
- Wang, P.; Pan, L.; Wang, J.; Xu, M.; Dai, G.; Zou, H.; Dong, K.; Wang, Z.L. An ultra-low-friction triboelectric–electromagnetic hybrid nanogenerator for rotation energy harvesting and self-powered wind speed sensor. ACS Nano 2018, 12, 9433–9440. [Google Scholar] [CrossRef] [PubMed]
- Mitcheson, P.D.; Sterken, T.; He, C.; Kiziroglou, M.; Yeatman, E.M.; Puers, R. Electrostatic microgenerators. Meas. Control 2008, 41, 114–119. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, S.; Zhang, Z.; Yurchenko, D. High-performance piezoelectric wind energy harvester with Y-shaped attachments. Energy Convers. Manag. 2019, 181, 645–652. [Google Scholar] [CrossRef]
- Guo, L.; Qing, L. Numerical analysis of a new piezoelectric-based energy harvesting pavement system: Lessons from laboratory-based and field-based simulations. Appl. Energy 2019, 235, 963–977. [Google Scholar] [CrossRef]
- Miao, G.; Fang, S.; Wang, S.; Zhou, S. A low-frequency rotational electromagnetic energy harvester using a magnetic plucking mechanism. Appl. Energy 2022, 305, 117838. [Google Scholar] [CrossRef]
- Fang, S.; Chen, K.; Lai, Z.; Zhou, S.; Yurchenko, D.; Liao, W.H. A bio-inspired system for simultaneous vibration isolation and energy harvesting in post-capture spacecraft. Mech. Syst. Signal Process. 2023, 199, 110466. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, Q.; Han, J.; Wang, W.; Wang, T.; Cao, X.; Hao, S. Design and investigation of a quad-stable piezoelectric vibration energy harvester by using geometric nonlinearity of springs. J. Sound Vib. 2023, 547, 117484. [Google Scholar] [CrossRef]
- Wang, K.; Ouyang, H.; Zhou, J.; Chang, Y.; Xu, D.; Zhao, H. A nonlinear hybrid energy harvester with high ultralow-frequency energy harvesting performance. Meccanica 2021, 56, 461–480. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Bowen, C.R.; Wei, Z.H.; Cao, J. Energy harvesting from ultra-low-frequency vibrations through a quasi-zero stiffness electromagnetic energy harvester. J. Vib. Eng. Technol. 2022, 11, 3353–3369. [Google Scholar] [CrossRef]
- Koszewnik, A.; Lesniewski, K.; Pakrashi, V. Numerical Analysis and Experimental Verification of Damage Identification Metrics for Smart Beam with MFC Elements to Support Structural Health Monitoring. Sensors 2021, 21, 6796. [Google Scholar] [CrossRef] [PubMed]
- Lee, G.; Lee, D.; Park, J.; Jang, Y.; Kim, M.; Rho, J. Piezoelectric energy harvesting using mechanical metamaterials and phononic crystals. Commun. Phys. 2022, 5, 94. [Google Scholar] [CrossRef]
- Chen, C.; Sharafi, A.; Sun, J.Q. A high density piezoelectric energy harvesting device from highway traffic–Design analysis and laboratory validation. Appl. Energy 2020, 269, 115073. [Google Scholar] [CrossRef]
- Wang, Y.R.; Kuo, C.H. Enhancing Electrical Generation Efficiency through Parametrical Excitation and Slap** Force in Nonlinear Elastic Beams for Vibration Energy Harvesting. Sensors 2023, 23, 7610. [Google Scholar] [CrossRef]
- Su, W.J.; Tseng, C.H. Design and Analysis of an Extended Simply Supported Beam Piezoelectric Energy Harvester. Sensors 2023, 23, 5895. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, Y.Q.; Zhou, S.X. Multistage oscillators for ultra-low frequency vibration isolation and energy harvesting. Sci. China Technol. Sci. 2022, 65, 631–645. [Google Scholar] [CrossRef]
- Qian, D.; Shi, Z.; Ning, C.; Wang, J. Nonlinear bandgap properties in a nonlocal piezoelectric phononic crystal nanobeam. Phys. Lett. A 2019, 383, 3101–3107. [Google Scholar] [CrossRef]
- Aichun, L.; Kiani, K. Bilaterally flexural vibrations and instabilities of moving piezoelectric nanowires with surface effect. Eur. Phys. J. Plus 2020, 135, 191. [Google Scholar] [CrossRef]
- Ke, L.L.; Wang, Y.S.; Wang, Z.D. Nonlinear vibration of the piezoelectric nanobeams based on the nonlocal theory. Compos. Struct. 2012, 94, 2038–2047. [Google Scholar] [CrossRef]
- Kiani, K. Column buckling of doubly parallel slender nanowires carrying electric current acted upon by a magnetic field. J. Phys. Chem. Solids 2016, 95, 89–97. [Google Scholar] [CrossRef]
- Kiani, K. Vibrations and instability of double-nanowire-systems as electric current carriers. Mod. Phys. Lett. B 2015, 29, 1550144. [Google Scholar] [CrossRef]
- Kiani, K. Elastic buckling of current-carrying double-nanowire systems immersed in a magnetic field. Acta Mech. 2016, 227, 3549–3570. [Google Scholar] [CrossRef]
- Hsiao, I.H.; Chung, C.Y. AI-infused semantic model to enrich and expand programming question generation. J. Artif. Intell. Technol. 2022, 2, 47–54. [Google Scholar] [CrossRef]
- Siahpour, S.; Li, X.; Lee, J. Deep learning-based cross-sensor domain adaptation for fault diagnosis of electro-mechanical actuators. Int. J. Dyn. Control 2020, 8, 1054–1062. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Xu, N.X.; Ding, Q. Deep learning-based machinery fault diagnostics with domain adaptation across sensors at different places. IEEE Trans. Ind. Electron. 2019, 67, 6785–6794. [Google Scholar] [CrossRef]
- Jia, Z.; Wang, W.; Zhang, J.; Li, H. Contact High-Temperature Strain Automatic Calibration and Precision Compensation Research. J. Artif. Intell. Technol. 2022, 2, 69–76. [Google Scholar]
- Du, H.; Du, S.; Li, W. Probabilistic time series forecasting with deep non-linear state space models. CAAI Trans. Intell. Technol. 2023, 8, 3–13. [Google Scholar] [CrossRef]
- Meng, J.; Li, Y.; Liang, H.; Ma, Y. Single-image dehazing based on two-stream convolutional neural network. J. Artif. Intell. Technol. 2022, 2, 100–110. [Google Scholar] [CrossRef]
- Zhao, H.; Ma, L. Several rough set models in quotient space. CAAI Trans. Intell. Technol. 2022, 7, 69–80. [Google Scholar] [CrossRef]
- Chen, J.; Yu, S.; Wei, W.; Ma, Y. Matrix-based method for solving decision domains of neighbourhood multigranulation decision-theoretic rough sets. CAAI Trans. Intell. Technol. 2022, 7, 313–327. [Google Scholar] [CrossRef]
- Tuo, J.; Deng, Z.; Zhang, H.; Qiu, J. A 3-axis torsion quasi-zero-stiffness-based sensor system for angular vibration measurement. J. Vib. Control 2018, 24, 4325–4336. [Google Scholar] [CrossRef]
- Liu, Q.; Qin, W.; Yang, Y.; Zhou, Z. Harvesting weak vibration energy by amplified inertial force and multi-stable buckling piezoelectric structure. Mech. Syst. Signal Process. 2023, 189, 110125. [Google Scholar] [CrossRef]
- Tuo, J.Y.; Deng, Z.X.; Zhang, H.S.; Huang, W. Quasi zero stiffness vibration sensing system. J. Jilin Univ. Eng. Ed. 2019, 49, 24–29. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Structural Parameters | Default Value |
|---|---|---|
| Stiffness of vertical spring | 40 N·m−1 | |
| Load object | 0.2 Kg | |
| Horizontal projection distance of the beam | 0.2 | |
| Equivalent resistance | 105 Ω | |
| Dimensionless mechanical parameters | 0.9 | |
| The length of the piezoelectric ceramic | 60 mm | |
| The width of piezoelectric ceramics | 31 mm | |
| The height of piezoelectric ceramics | 0.2 mm | |
| Young’s modulus of piezoelectric ceramics | 55 GPa | |
| Dimensionless capacitance | 0.05 | |
| Damping ratio | 0.01 | |
| Dimensionless magnitude | 0.1 | |
| Number of piezoelectric Euler beam | 2 | |
| Dimensionless piezoelectric coupling coefficient | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tuo, J.; Xu, X.; Li, J.; Dai, T.; Liu, Z. Quasi-Zero Stiffness Vibration Sensing and Energy Harvesting Integration Based on Buckled Piezoelectric Euler Beam. Sensors 2024, 24, 153. https://doi.org/10.3390/s24010153
Tuo J, Xu X, Li J, Dai T, Liu Z. Quasi-Zero Stiffness Vibration Sensing and Energy Harvesting Integration Based on Buckled Piezoelectric Euler Beam. Sensors. 2024; 24(1):153. https://doi.org/10.3390/s24010153
Chicago/Turabian StyleTuo, Jiying, Xiaonan Xu, Jun Li, Tianlang Dai, and Zilin Liu. 2024. "Quasi-Zero Stiffness Vibration Sensing and Energy Harvesting Integration Based on Buckled Piezoelectric Euler Beam" Sensors 24, no. 1: 153. https://doi.org/10.3390/s24010153