
SNOWED: Automatically Constructed Dataset of Satellite Imagery for Water Edge Measurements



Abstract
:1. Introduction
- SNOWED is constructed with a fully automatic algorithm, without human intervention or interpretations.
- SNOWED is annotated using certified shoreline measurements.
- SNOWED contains satellite images of different types of coasts, located in a wide geographical area, including images related to very elaborate shorelines.
2. Publicly Available Datasets of Satellite Images for Sea/Land Segmentation
2.1. Water Segmentation Data Set (QueryPlanet Project)
2.2. Sea–Land Segmentation Benchmark Dataset
2.3. YTU-WaterNet
2.4. Sentinel-2 Water Edges Dataset (SWED)
2.5. Summary of the Characteristics of the Already Available Datasets, and of the New SNOWED Dataset
3. Data and Methods
3.1. Data Sources
3.1.1. Sentinel-2 Satellite Imagery
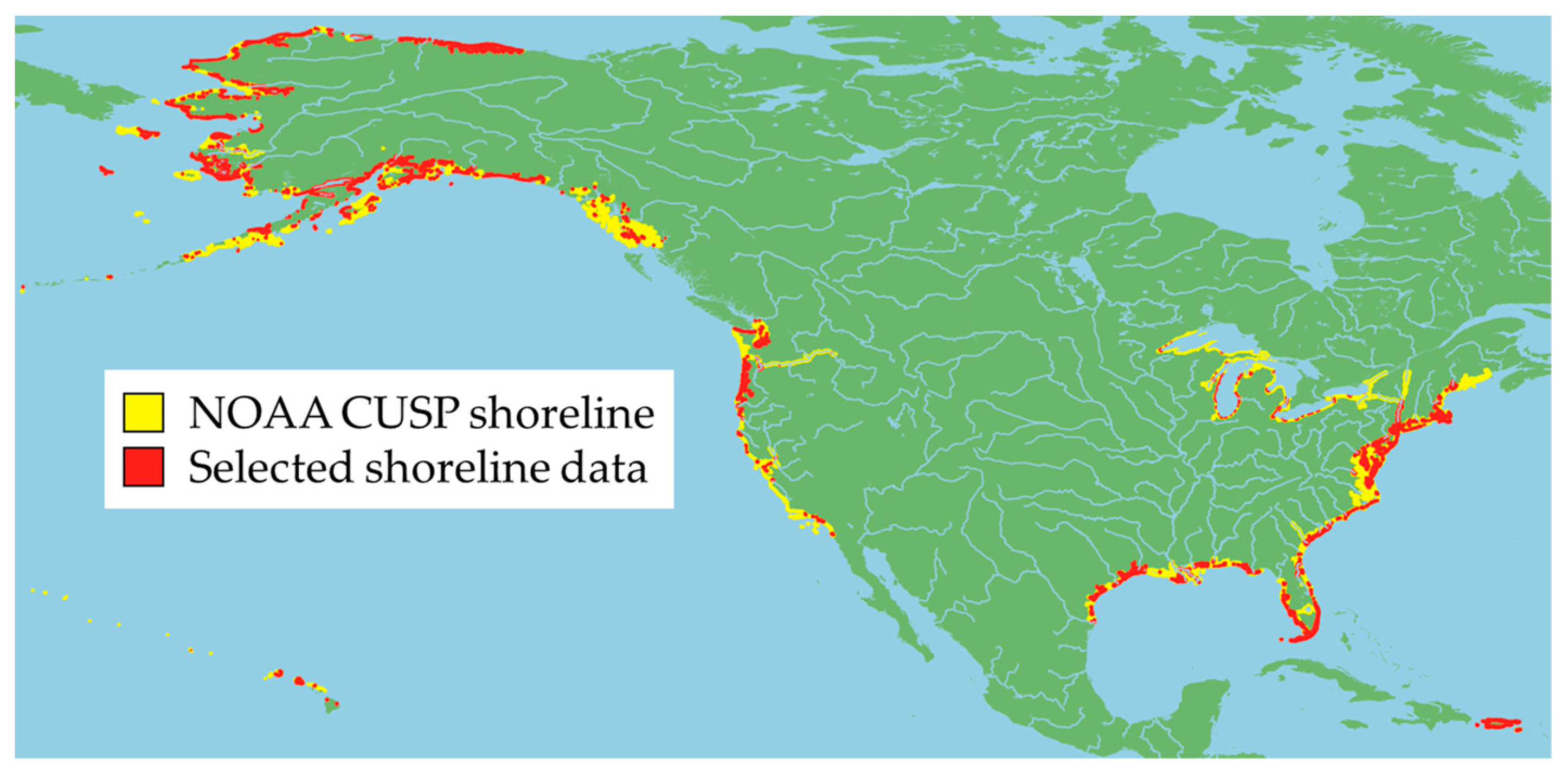
3.1.2. Shoreline Data
3.2. Shoreline Data Preprocessing (Selection and Merging)
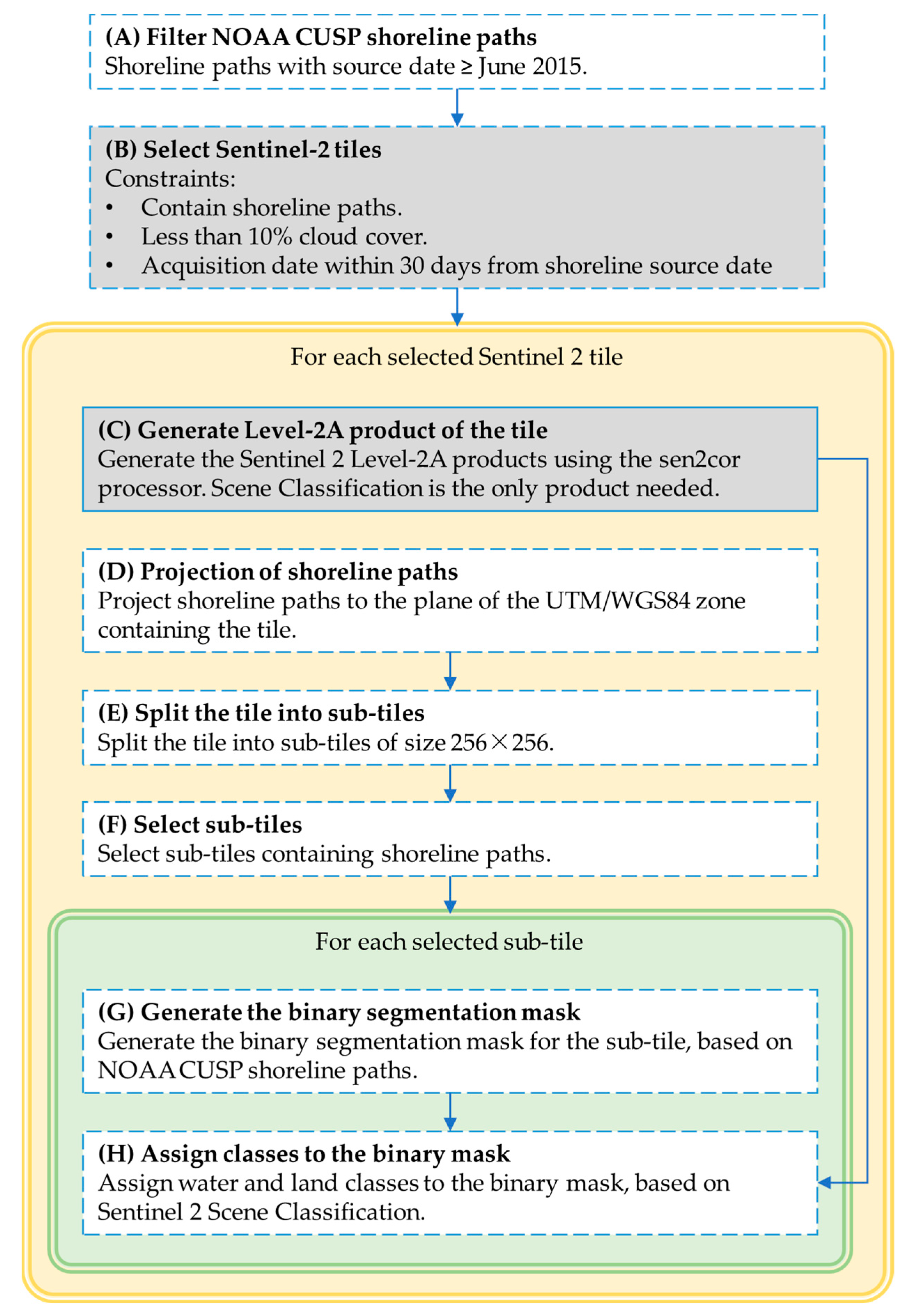
3.3. Selection of Satellite Images
- Sentinel tiles must contain the shoreline path.
- Cloud cover of Sentinel tiles must be lesser than 10% (parameter: cloud_cover).
- Sentinel tiles acquisition date must be at most 30 days (parameter: time_difference) before or after the shoreline date.
- (1)
- The quality of each sample generated with this method is assured by later checks, which are also automatic, being based on Sentinel data themselves (see Section 3, in particular, Section 3.4). For example, the presence of clouds in localized areas of the tile is not detrimental.
- (2)
- Further releasing the constraints (cloud coverage and time difference) do not lead, ultimately, to a significant increase in the dataset’s size.
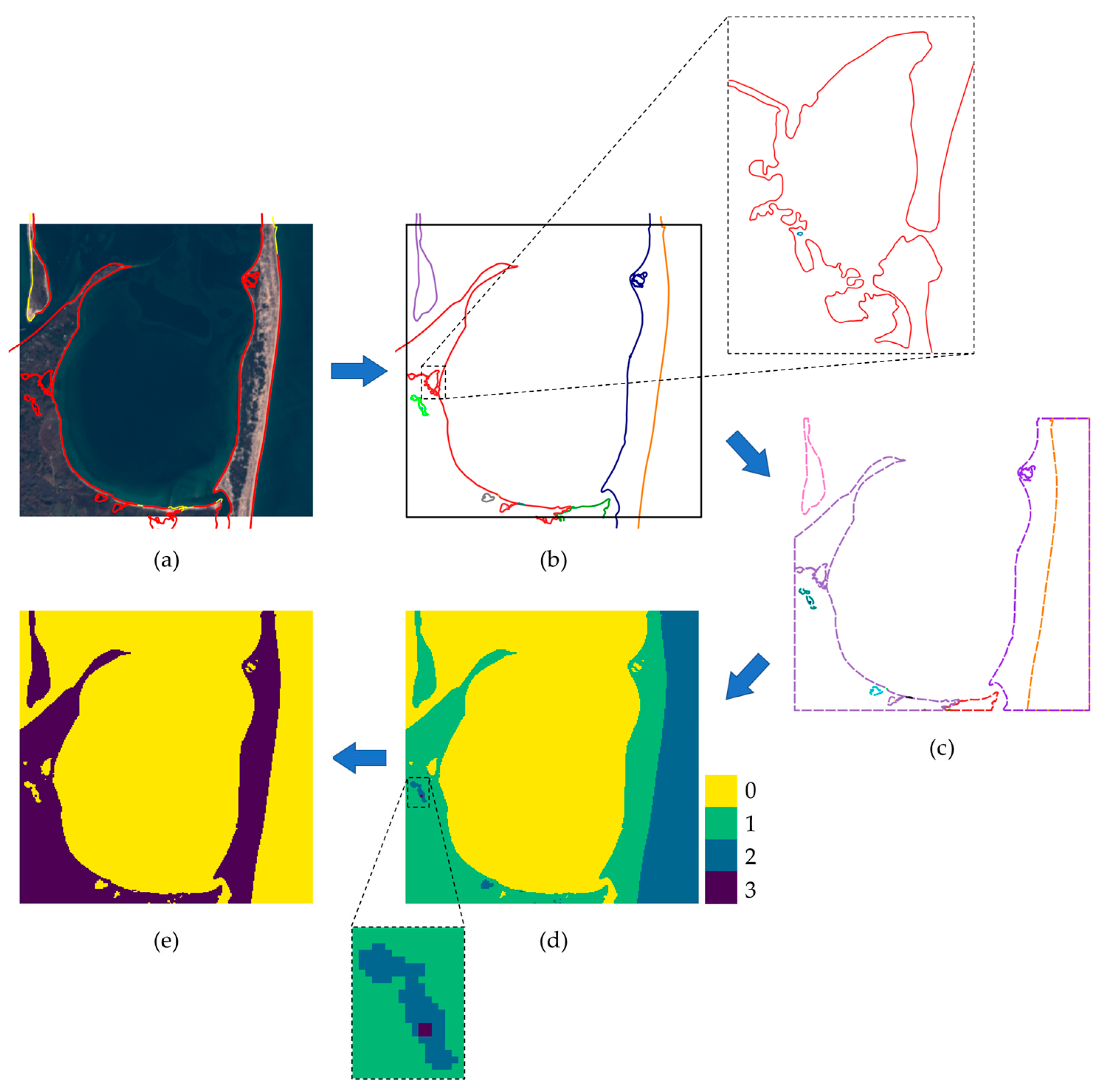
3.4. Extraction of Samples and Labeling
3.5. Overview of the Dataset Generation Procedure
4. Results and Discussion
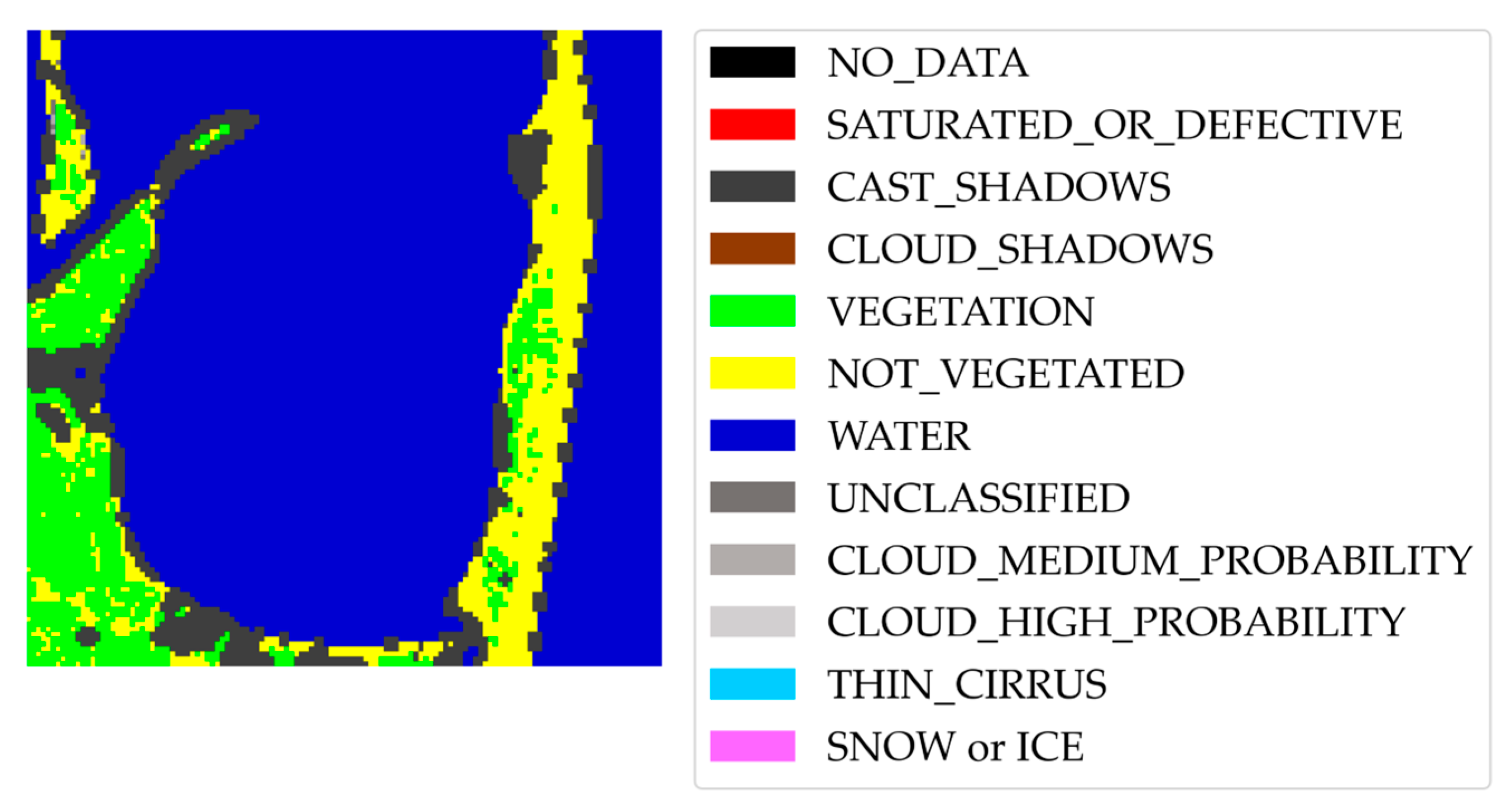
- Level-2A SC mask.
- Shoreline paths are used for labeling, each with its measurement date.
- PEPS CNES identifier of the Sentinel-2 Level-1C tile.
- Acquisition date of the Sentinel-2 Level-1C tile.
- Pixels offset of the sub-tile in the complete Sentinel-2 image.
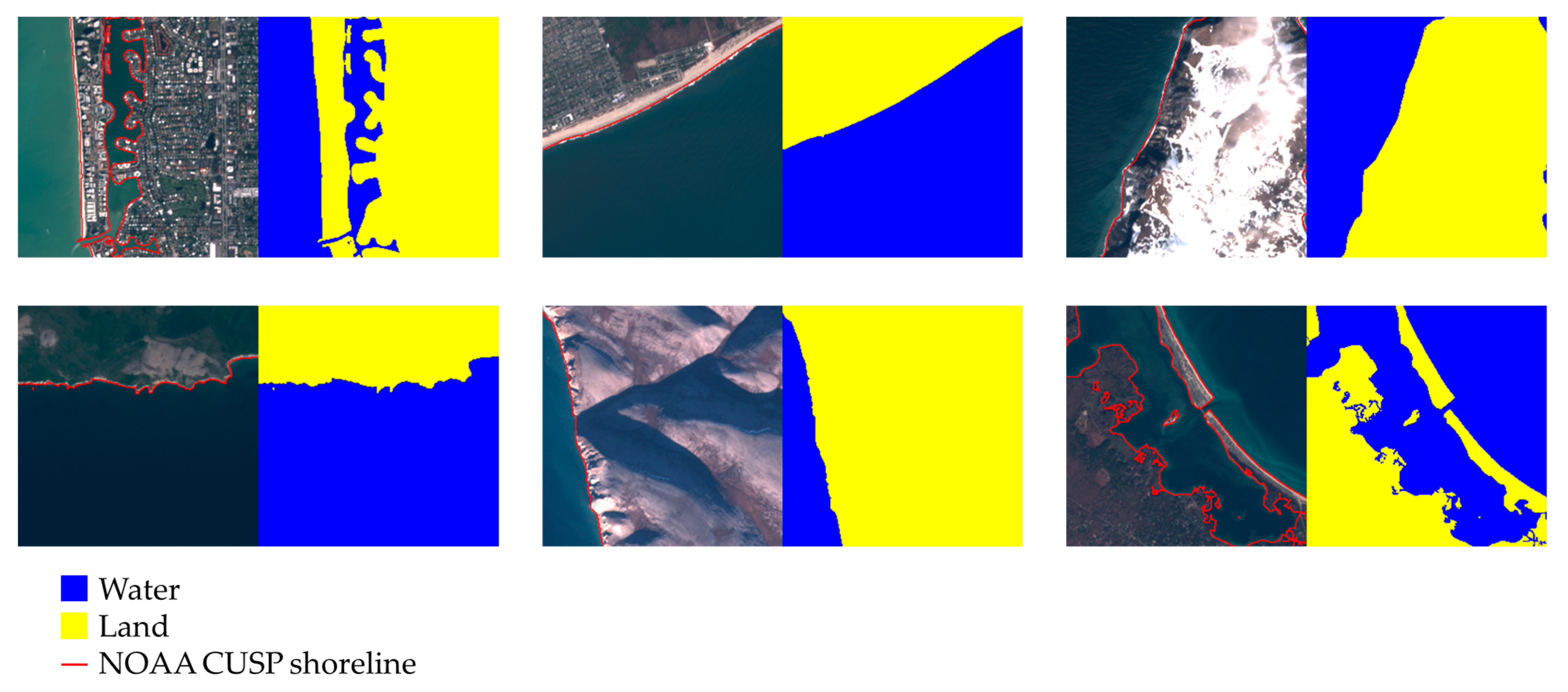
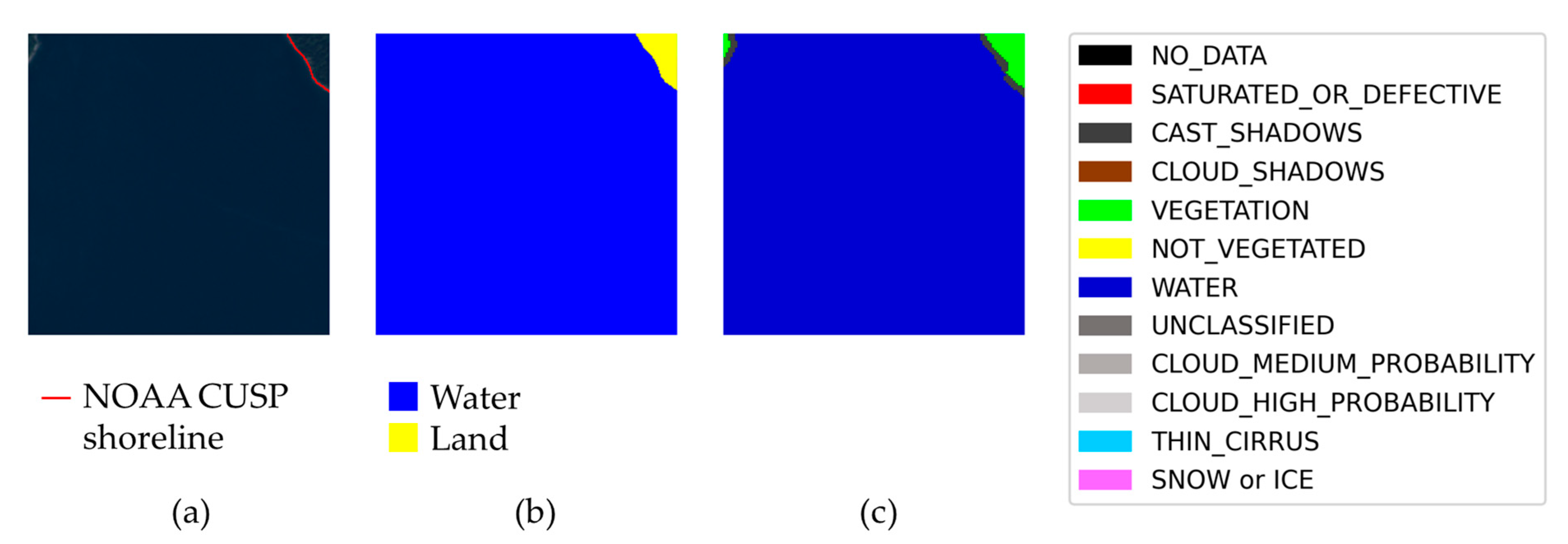
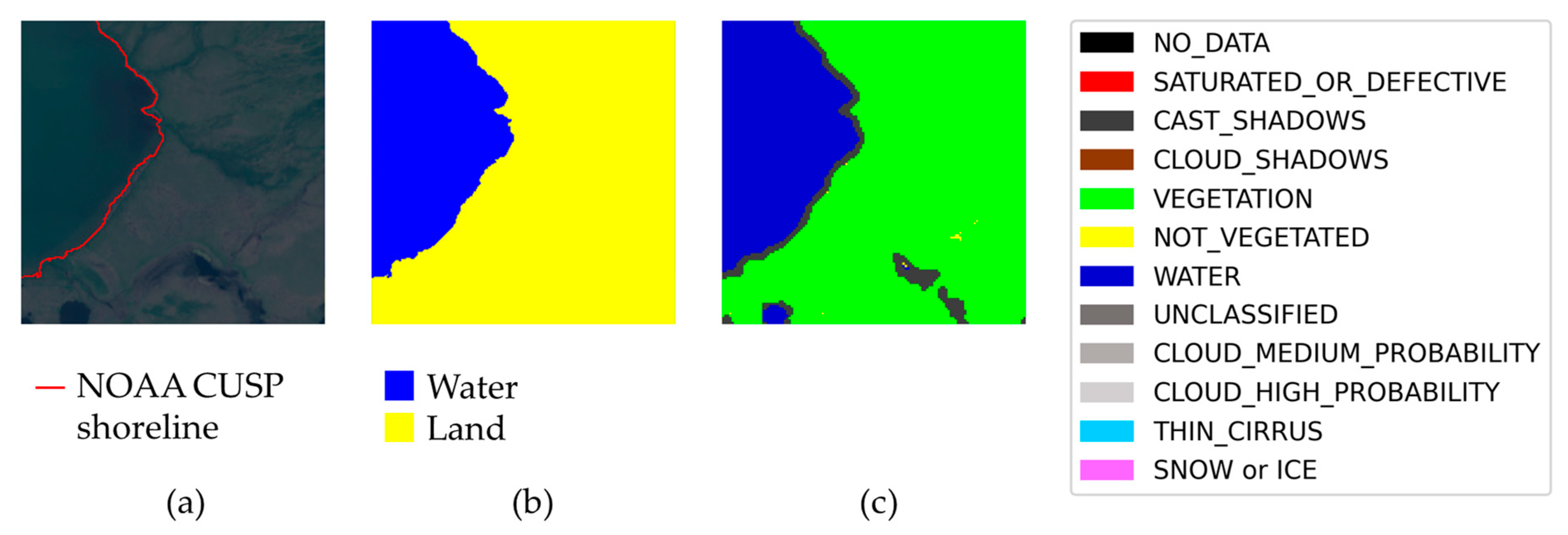
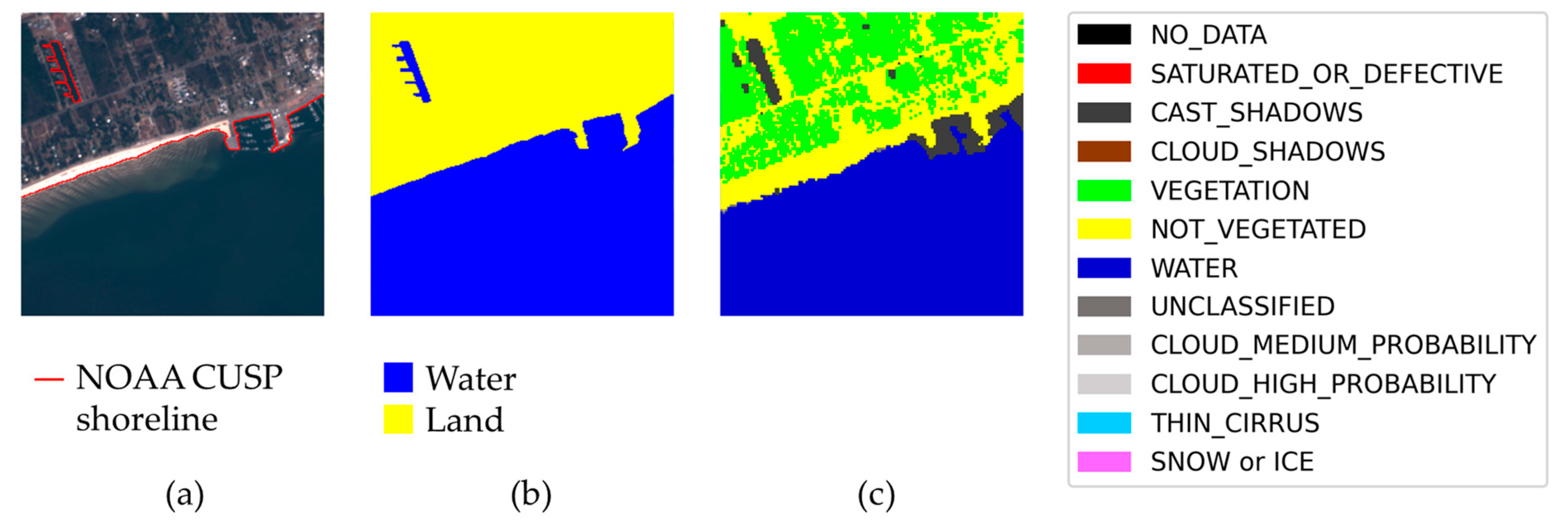
4.1. Dataset Visual Quality Assessment
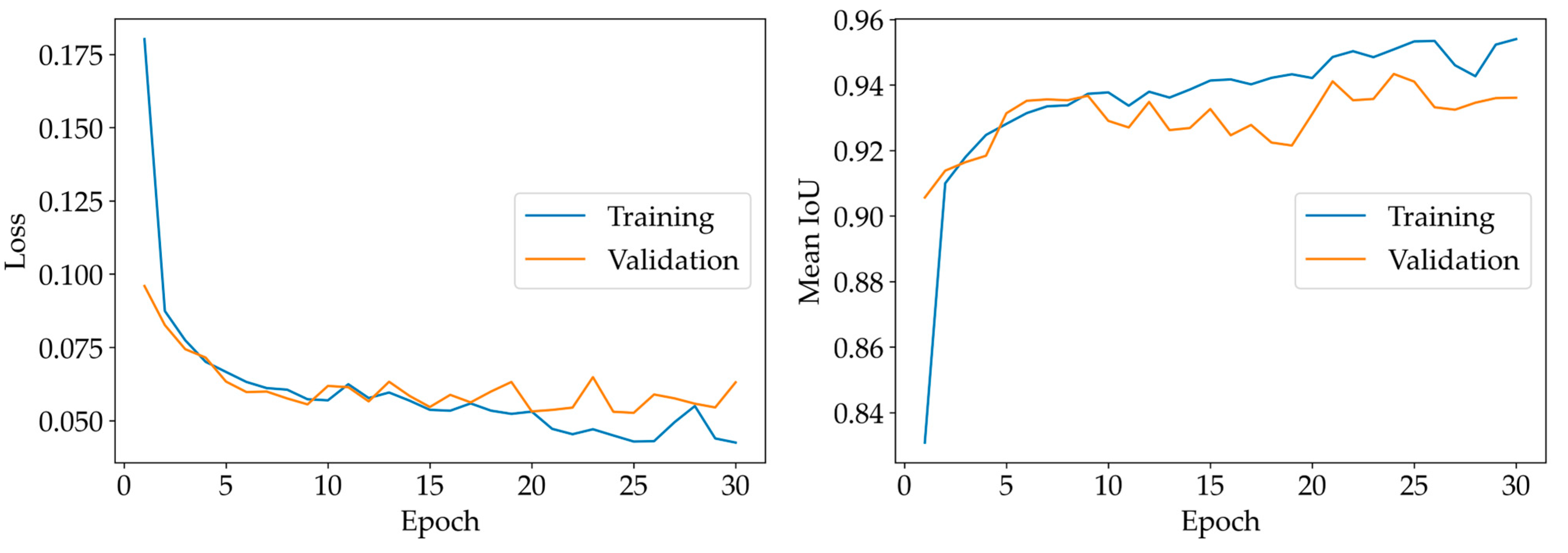
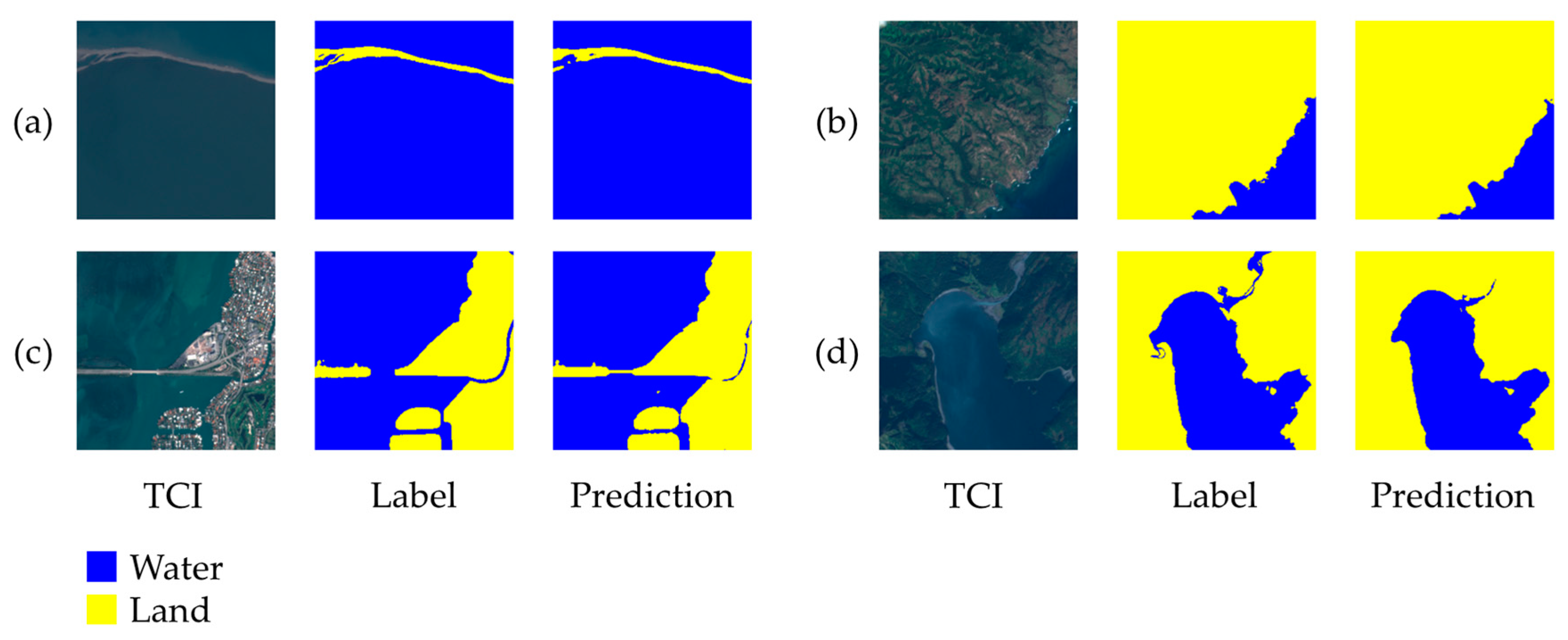
4.2. Example Application of the Dataset
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martínez, M.L.; Intralawan, A.; Vázquez, G.; Pérez-Maqueo, O.; Sutton, P.; Landgrave, R. The Coasts of Our World: Ecological, Economic and Social Importance. Ecol. Econ. 2007, 63, 254–272. [Google Scholar] [CrossRef]
- Halpern, B.S.; Frazier, M.; Afflerbach, J.; Lowndes, J.S.; Micheli, F.; O’Hara, C.; Scarborough, C.; Selkoe, K.A. Recent Pace of Change in Human Impact on the World’s Ocean. Sci. Rep. 2019, 9, 11609. [Google Scholar] [CrossRef] [PubMed]
- Adamo, F.; Andria, G.; Cavone, G.; De Capua, C.; Lanzolla, A.M.L.; Morello, R.; Spadavecchia, M. Estimation of Ship Emissions in the Port of Taranto. Measurement 2014, 47, 982–988. [Google Scholar] [CrossRef]
- Cotecchia, F.; Vitone, C.; Sollecito, F.; Mali, M.; Miccoli, D.; Petti, R.; Milella, D.; Ruggieri, G.; Bottiglieri, O.; Santaloia, F.; et al. A Geo-Chemo-Mechanical Study of a Highly Polluted Marine System (Taranto, Italy) for the Enhancement of the Conceptual Site Model. Sci. Rep. 2021, 11, 4017. [Google Scholar] [CrossRef]
- Tiwari, M.; Rathod, T.D.; Ajmal, P.Y.; Bhangare, R.C.; Sahu, S.K. Distribution and Characterization of Microplastics in Beach Sand from Three Different Indian Coastal Environments. Mar. Pollut. Bull. 2019, 140, 262–273. [Google Scholar] [CrossRef] [PubMed]
- Vedolin, M.C.; Teophilo, C.Y.S.; Turra, A.; Figueira, R.C.L. Spatial Variability in the Concentrations of Metals in Beached Microplastics. Mar. Pollut. Bull. 2018, 129, 487–493. [Google Scholar] [CrossRef]
- Traganos, D.; Aggarwal, B.; Poursanidis, D.; Topouzelis, K.; Chrysoulakis, N.; Reinartz, P. Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas. Remote Sens. 2018, 10, 1227. [Google Scholar] [CrossRef]
- Scarpetta, M.; Affuso, P.; De Virgilio, M.; Spadavecchia, M.; Andria, G.; Giaquinto, N. Monitoring of Seagrass Meadows Using Satellite Images and U-Net Convolutional Neural Network. In Proceedings of the 2022 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Ottawa, ON, Canada, 16–19 May 2022; pp. 1–6. [Google Scholar]
- Adamo, F.; Attivissimo, F.; Carducci, C.G.C.; Lanzolla, A.M.L. A Smart Sensor Network for Sea Water Quality Monitoring. IEEE Sens. J. 2015, 15, 2514–2522. [Google Scholar] [CrossRef]
- Attivissimo, F.; Carducci, C.G.C.; Lanzolla, A.M.L.; Massaro, A.; Vadrucci, M.R. A Portable Optical Sensor for Sea Quality Monitoring. IEEE Sens. J. 2015, 15, 146–153. [Google Scholar] [CrossRef]
- Lu, J.; Wu, J.; Zhang, C.; Zhang, Y.; Lin, Y.; Luo, Y. Occurrence, Distribution, and Ecological-Health Risks of Selected Antibiotics in Coastal Waters along the Coastline of China. Sci. Total Environ. 2018, 644, 1469–1476. [Google Scholar] [CrossRef]
- Zhang, R.; Pei, J.; Zhang, R.; Wang, S.; Zeng, W.; Huang, D.; Wang, Y.; Zhang, Y.; Wang, Y.; Yu, K. Occurrence and Distribution of Antibiotics in Mariculture Farms, Estuaries and the Coast of the Beibu Gulf, China: Bioconcentration and Diet Safety of Seafood. Ecotoxicol. Environ. Saf. 2018, 154, 27–35. [Google Scholar] [CrossRef]
- Kaku, K. Satellite Remote Sensing for Disaster Management Support: A Holistic and Staged Approach Based on Case Studies in Sentinel Asia. Int. J. Disaster Risk Reduct. 2019, 33, 417–432. [Google Scholar] [CrossRef]
- Sòria-Perpinyà, X.; Vicente, E.; Urrego, P.; Pereira-Sandoval, M.; Tenjo, C.; Ruíz-Verdú, A.; Delegido, J.; Soria, J.M.; Peña, R.; Moreno, J. Validation of Water Quality Monitoring Algorithms for Sentinel-2 and Sentinel-3 in Mediterranean Inland Waters with In Situ Reflectance Data. Water 2021, 13, 686. [Google Scholar] [CrossRef]
- Angelini, M.G.; Costantino, D.; Di Nisio, A. ASTER Image for Environmental Monitoring Change Detection and Thermal Map. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Spinosa, A.; Ziemba, A.; Saponieri, A.; Damiani, L.; El Serafy, G. Remote Sensing-Based Automatic Detection of Shoreline Position: A Case Study in Apulia Region. J. Mar. Sci. Eng. 2021, 9, 575. [Google Scholar] [CrossRef]
- Scarpetta, M.; Spadavecchia, M.; Andria, G.; Ragolia, M.A.; Giaquinto, N. Simultaneous Measurement of Heartbeat Intervals and Respiratory Signal Using a Smartphone. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lausanne, Switzerland, 23–25 June 2021; pp. 1–5. [Google Scholar]
- Abdelhady, H.U.; Troy, C.D.; Habib, A.; Manish, R. A Simple, Fully Automated Shoreline Detection Algorithm for High-Resolution Multi-Spectral Imagery. Remote Sens. 2022, 14, 557. [Google Scholar] [CrossRef]
- Sekar, C.S.; Kankara, R.S.; Kalaivanan, P. Pixel-Based Classification Techniques for Automated Shoreline Extraction on Open Sandy Coast Using Different Optical Satellite Images. Arab. J. Geosci. 2022, 15, 939. [Google Scholar] [CrossRef]
- Ragolia, M.A.; Andria, G.; Attivissimo, F.; Nisio, A.D.; Maria Lucia Lanzolla, A.; Spadavecchia, M.; Larizza, P.; Brunetti, G. Performance Analysis of an Electromagnetic Tracking System for Surgical Navigation. In Proceedings of the 2019 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Istanbul, Turkey, 26–28 June 2019; pp. 1–6. [Google Scholar]
- De Palma, L.; Scarpetta, M.; Spadavecchia, M. Characterization of Heart Rate Estimation Using Piezoelectric Plethysmography in Time- and Frequency-Domain. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–6. [Google Scholar]
- Alcaras, E.; Falchi, U.; Parente, C.; Vallario, A. Accuracy Evaluation for Coastline Extraction from Pléiades Imagery Based on NDWI and IHS Pan-Sharpening Application. Appl. Geomat. 2022. [Google Scholar] [CrossRef]
- Dai, C.; Howat, I.M.; Larour, E.; Husby, E. Coastline Extraction from Repeat High Resolution Satellite Imagery. Remote Sens. Environ. 2019, 229, 260–270. [Google Scholar] [CrossRef]
- Al Ruheili, A.M.; Boluwade, A. Quantifying Coastal Shoreline Erosion Due to Climatic Extremes Using Remote-Sensed Estimates from Sentinel-2A Data. Environ. Process. 2021, 8, 1121–1140. [Google Scholar] [CrossRef]
- Sunny, D.S.; Islam, K.M.A.; Mullick, M.R.A.; Ellis, J.T. Performance Study of Imageries from MODIS, Landsat 8 and Sentinel-2 on Measuring Shoreline Change at a Regional Scale. Remote Sens. Appl. Soc. Environ. 2022, 28, 100816. [Google Scholar] [CrossRef]
- Sánchez-García, E.; Palomar-Vázquez, J.M.; Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Cabezas-Rabadán, C.; Gómez-Pujol, L. An Efficient Protocol for Accurate and Massive Shoreline Definition from Mid-Resolution Satellite Imagery. Coast. Eng. 2020, 160, 103732. [Google Scholar] [CrossRef]
- Cabezas-Rabadán, C.; Pardo-Pascual, J.E.; Palomar-Vázquez, J.; Fernández-Sarría, A. Characterizing Beach Changes Using High-Frequency Sentinel-2 Derived Shorelines on the Valencian Coast (Spanish Mediterranean). Sci. Total Environ. 2019, 691, 216–231. [Google Scholar] [CrossRef] [PubMed]
- Novellino, A.; Engwell, S.L.; Grebby, S.; Day, S.; Cassidy, M.; Madden-Nadeau, A.; Watt, S.; Pyle, D.; Abdurrachman, M.; Edo Marshal Nurshal, M.; et al. Mapping Recent Shoreline Changes Spanning the Lateral Collapse of Anak Krakatau Volcano, Indonesia. Appl. Sci. 2020, 10, 536. [Google Scholar] [CrossRef]
- Guo, Z.; Wu, L.; Huang, Y.; Guo, Z.; Zhao, J.; Li, N. Water-Body Segmentation for SAR Images: Past, Current, and Future. Remote Sens. 2022, 14, 1752. [Google Scholar] [CrossRef]
- Tsiakos, C.-A.D.; Chalkias, C. Use of Machine Learning and Remote Sensing Techniques for Shoreline Monitoring: A Review of Recent Literature. Appl. Sci. 2023, 13, 3268. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Part III, Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Baumhoer, C.A.; Dietz, A.J.; Kneisel, C.; Kuenzer, C. Automated Extraction of Antarctic Glacier and Ice Shelf Fronts from Sentinel-1 Imagery Using Deep Learning. Remote Sens. 2019, 11, 2529. [Google Scholar] [CrossRef]
- Heidler, K.; Mou, L.; Baumhoer, C.; Dietz, A.; Zhu, X.X. HED-UNet: Combined Segmentation and Edge Detection for Monitoring the Antarctic Coastline. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4300514. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, Q.; Wang, H.; Kang, Y.; Li, X. Automatic Waterline Extraction and Topographic Mapping of Tidal Flats From SAR Images Based on Deep Learning. Geophys. Res. Lett. 2022, 49, e2021GL096007. [Google Scholar] [CrossRef]
- Aghdami-Nia, M.; Shah-Hosseini, R.; Rostami, A.; Homayouni, S. Automatic Coastline Extraction through Enhanced Sea-Land Segmentation by Modifying Standard U-Net. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102785. [Google Scholar] [CrossRef]
- Shamsolmoali, P.; Zareapoor, M.; Wang, R.; Zhou, H.; Yang, J. A Novel Deep Structure U-Net for Sea-Land Segmentation in Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3219–3232. [Google Scholar] [CrossRef]
- Li, R.; Liu, W.; Yang, L.; Sun, S.; Hu, W.; Zhang, F.; Li, W. DeepUNet: A Deep Fully Convolutional Network for Pixel-Level Sea-Land Segmentation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3954–3962. [Google Scholar] [CrossRef]
- Cheng, D.; Meng, G.; Xiang, S.; Pan, C. FusionNet: Edge Aware Deep Convolutional Networks for Semantic Segmentation of Remote Sensing Harbor Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5769–5783. [Google Scholar] [CrossRef]
- Cheng, D.; Meng, G.; Cheng, G.; Pan, C. SeNet: Structured Edge Network for Sea–Land Segmentation. IEEE Geosci. Remote Sens. Lett. 2017, 14, 247–251. [Google Scholar] [CrossRef]
- Cui, B.; Jing, W.; Huang, L.; Li, Z.; Lu, Y. SANet: A Sea–Land Segmentation Network Via Adaptive Multiscale Feature Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 116–126. [Google Scholar] [CrossRef]
- Dang, K.B.; Dang, V.B.; Ngo, V.L.; Vu, K.C.; Nguyen, H.; Nguyen, D.A.; Nguyen, T.D.L.; Pham, T.P.N.; Giang, T.L.; Nguyen, H.D.; et al. Application of Deep Learning Models to Detect Coastlines and Shorelines. J. Environ. Manag. 2022, 320, 115732. [Google Scholar] [CrossRef] [PubMed]
- Tajima, Y.; Wu, L.; Watanabe, K. Development of a Shoreline Detection Method Using an Artificial Neural Network Based on Satellite SAR Imagery. Remote Sens. 2021, 13, 2254. [Google Scholar] [CrossRef]
- Jing, W.; Cui, B.; Lu, Y.; Huang, L. BS-Net: Using Joint-Learning Boundary and Segmentation Network for Coastline Extraction from Remote Sensing Images. Remote Sens. Lett. 2021, 12, 1260–1268. [Google Scholar] [CrossRef]
- Scarpetta, M.; Spadavecchia, M.; Adamo, F.; Ragolia, M.A.; Giaquinto, N. Detection and Characterization of Multiple Discontinuities in Cables with Time-Domain Reflectometry and Convolutional Neural Networks. Sensors 2021, 21, 8032. [Google Scholar] [CrossRef]
- Frolov, V.; Faizov, B.; Shakhuro, V.; Sanzharov, V.; Konushin, A.; Galaktionov, V.; Voloboy, A. Image Synthesis Pipeline for CNN-Based Sensing Systems. Sensors 2022, 22, 2080. [Google Scholar] [CrossRef]
- Scarpetta, M.; Spadavecchia, M.; Andria, G.; Ragolia, M.A.; Giaquinto, N. Analysis of TDR Signals with Convolutional Neural Networks. In Proceedings of the 2021 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Virtual, 17–20 May 2021; pp. 1–6. [Google Scholar]
- Scarpetta, M.; Spadavecchia, M.; D’Alessandro, V.I.; Palma, L.D.; Giaquinto, N. A New Dataset of Satellite Images for Deep Learning-Based Coastline Measurement. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022; pp. 635–640. [Google Scholar]
- Andria, G.; Scarpetta, M.; Spadavecchia, M.; Affuso, P.; Giaquinto, N. Sentinel2-NOAA Water Edges Dataset (SNOWED). Available online: https://doi.org/10.5281/Zenodo.7871636 (accessed on 27 April 2023).
- QueryPlanet Water Segmentation Data Set. Available online: http://queryplanet.sentinel-hub.com/index.html?prefix=/#waterdata (accessed on 28 June 2022).
- Mcfeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, S.; Hong, Z.; Zhang, Y.; Han, Y.; Zhou, R.; Wang, J.; Yang, S.; Tong, X.; Kuc, T. Sea-Land Segmentation Using Deep Learning Techniques for Landsat-8 OLI Imagery. Mar. Geod. 2020, 43, 105–133. [Google Scholar] [CrossRef]
- Erdem, F.; Bayram, B.; Bakirman, T.; Bayrak, O.C.; Akpinar, B. An Ensemble Deep Learning Based Shoreline Segmentation Approach (WaterNet) from Landsat 8 OLI Images. Adv. Space Res. 2021, 67, 964–974. [Google Scholar] [CrossRef]
- Seale, C.; Redfern, T.; Chatfield, P.; Luo, C.; Dempsey, K. Coastline Detection in Satellite Imagery: A Deep Learning Approach on New Benchmark Data. Remote Sens. Environ. 2022, 278, 113044. [Google Scholar] [CrossRef]
- Snyder, J.P. Map Projections—A Working Manual; US Government Printing Office: Washington, DC, USA, 1987; Volume 1395.
- Sentinel-2—Missions—Sentinel Online—Sentinel Online. Available online: https://sentinel.esa.int/en/web/sentinel/missions/sentinel-2 (accessed on 27 June 2022).
- NOAA Shoreline Website. Available online: https://shoreline.noaa.gov/data/datasheets/cusp.html (accessed on 29 June 2022).
- Aslaksen, M.L.; Blackford, T.; Callahan, D.; Clark, B.; Doyle, T.; Engelhardt, W.; Espey, M.; Gillens, D.; Goodell, S.; Graham, D.; et al. Scope of Work for Shoreline Mapping under the Noaa Coastal Mapping Program, Version 15. Available online: https://geodesy.noaa.gov/ContractingOpportunities/cmp-sow-v15.pdf (accessed on 13 April 2023).
- PEPS—Operating Platform Sentinel Products (CNES). Available online: https://peps.cnes.fr/rocket/#/home (accessed on 29 June 2022).
- Sen2Cor—STEP. Available online: http://step.esa.int/main/snap-supported-plugins/sen2cor/ (accessed on 31 January 2023).
- Level-2A Algorithm—Sentinel-2 MSI Technical Guide—Sentinel Online. Available online: https://copernicus.eu/technical-guides/sentinel-2-msi/level-2a/algorithm-overview (accessed on 17 April 2023).
- Sentinel-2—Data Products—Sentinel Handbook—Sentinel Online. Available online: https://sentinel.esa.int/en/web/sentinel/missions/sentinel-2/data-products (accessed on 31 January 2023).
- Cavone, G.; Giaquinto, N.; Fabbiano, L.; Vacca, G. Design of Single Sampling Plans by Closed-Form Equations. In Proceedings of the 2013 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Minneapolis, MN, USA, 6–9 May 2013; pp. 597–602. [Google Scholar]
- Nicholson, W.L. On the Normal Approximation to the Hypergeometric Distribution. Ann. Math. Stat. 1956, 27, 471–483. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset ID | N. of Images | Image Size | Source of Coastline Data |
|---|---|---|---|
| QueryPlanet [49] | 5177 | 64 × 64 | Human interpretation of TCI images |
| Sea–land segmentation benchmark dataset [51] | 831 | 512 × 512 | Human interpretation of TCI images |
| YTU-WaterNet [52] | 1008 | 512 × 512 | Human-generated OpenStreetMap water polygons data |
| SWED [53] | 9013 | 256 × 256 | Human interpretation of high-resolution aerial imagery available in Google Earth and Bing Maps |
| SNOWED | 4334 | 256 × 256 | U.S. NOAA shoreline measurements |
| Initial number of paths | 779,954 |
| Total length of the paths | 403,707 km |
| Number of selected paths | 221,331 |
| Total length of selected paths | 107,600 km |
| Number of paths after merging | 126,938 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andria, G.; Scarpetta, M.; Spadavecchia, M.; Affuso, P.; Giaquinto, N. SNOWED: Automatically Constructed Dataset of Satellite Imagery for Water Edge Measurements. Sensors 2023, 23, 4491. https://doi.org/10.3390/s23094491
Andria G, Scarpetta M, Spadavecchia M, Affuso P, Giaquinto N. SNOWED: Automatically Constructed Dataset of Satellite Imagery for Water Edge Measurements. Sensors. 2023; 23(9):4491. https://doi.org/10.3390/s23094491
Chicago/Turabian StyleAndria, Gregorio, Marco Scarpetta, Maurizio Spadavecchia, Paolo Affuso, and Nicola Giaquinto. 2023. "SNOWED: Automatically Constructed Dataset of Satellite Imagery for Water Edge Measurements" Sensors 23, no. 9: 4491. https://doi.org/10.3390/s23094491