

In-Wall Imaging for the Reconstruction of Obstacles by Reverse Time Migration


Abstract
:1. Introduction
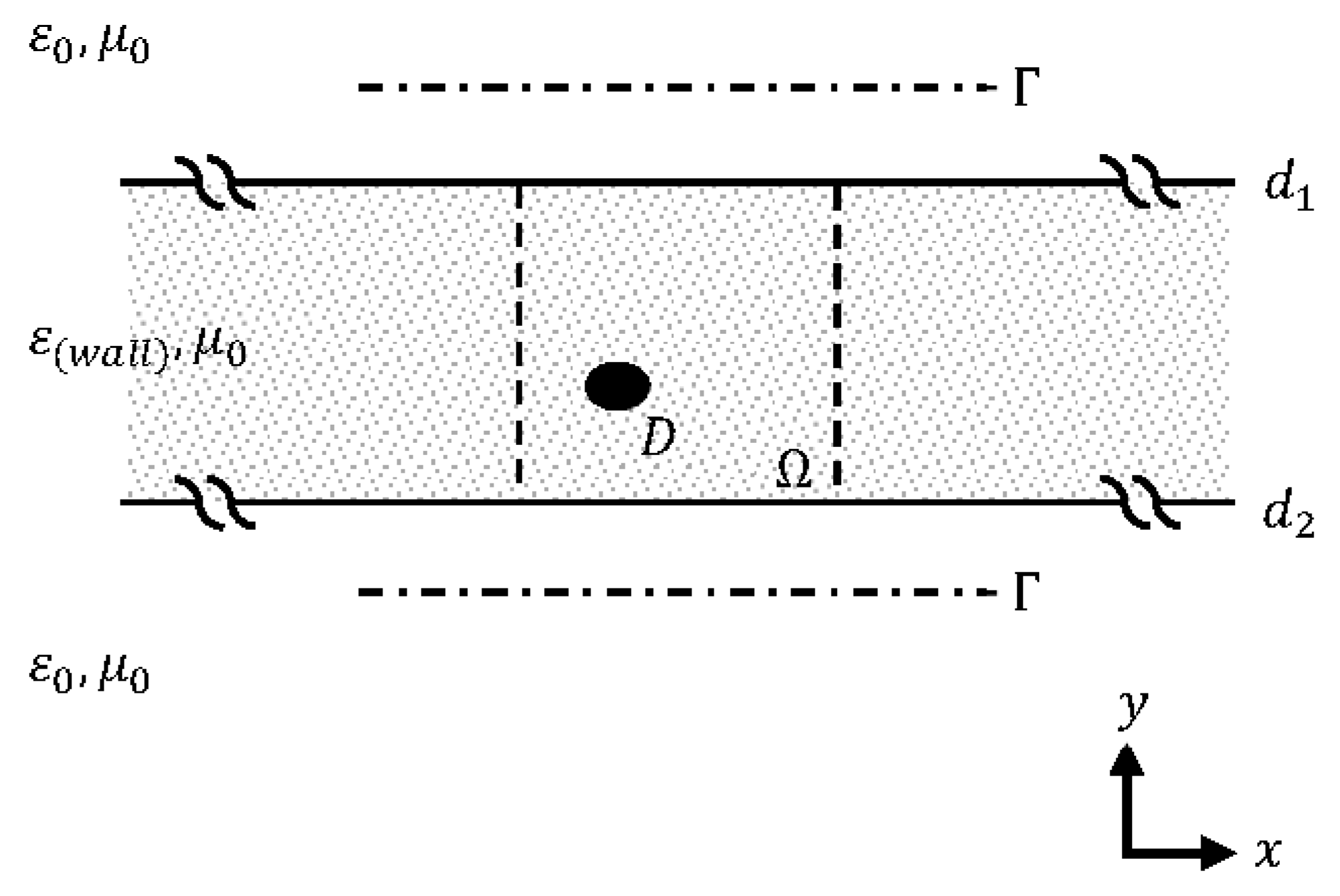
2. Formulation of the Problem
3. The Method
3.1. Reverse Time Migration (RTM) Method
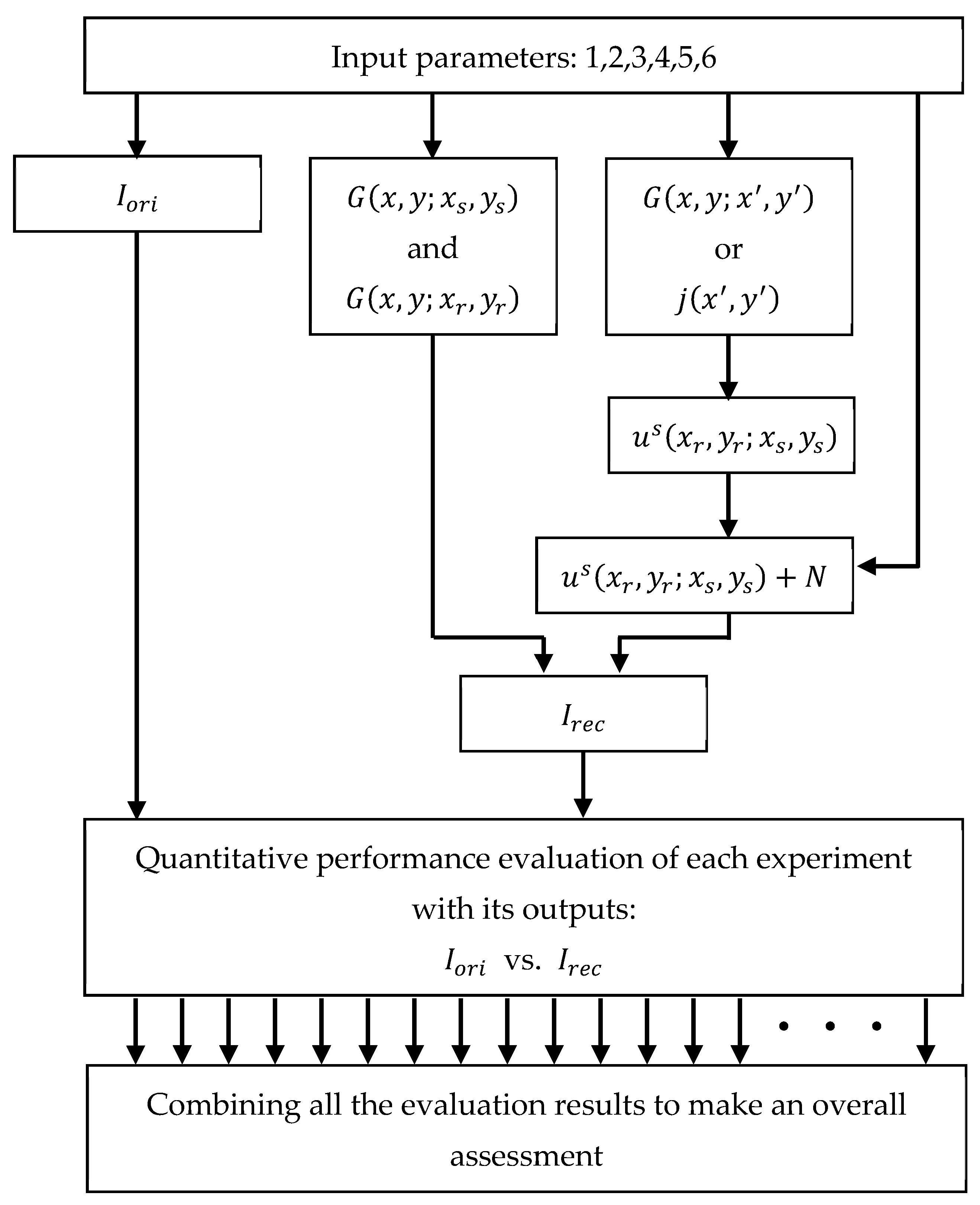
3.2. Monte Carlo Simulation
- Acquisition line;
- Material type of the embedded object;
- Structural property of the embedded object;
- Location of the embedded object;
- Operating wavelength;
- Noise level in the medium.
- Input parameters are the six parameters listed above;
- is the original information data;
- and are the Green’s functions computed on and , respectively;
- If the embedded object is a dielectric material, Green’s functions are computed on two different domains, on and ;
- If it is a PEC material, the inducted electric current is computed on the surface of the object, on ;
- is the scattered data synthetically acquired on due to the sources located at ;
- The noise level in the medium is added to the noise-free data: ;
- is the reconstructed information data obtained from the RTM method;
- Procedures for quantitative performance evaluation of an experiment and an overall assessment of the whole experiment set are considered in Section 4.
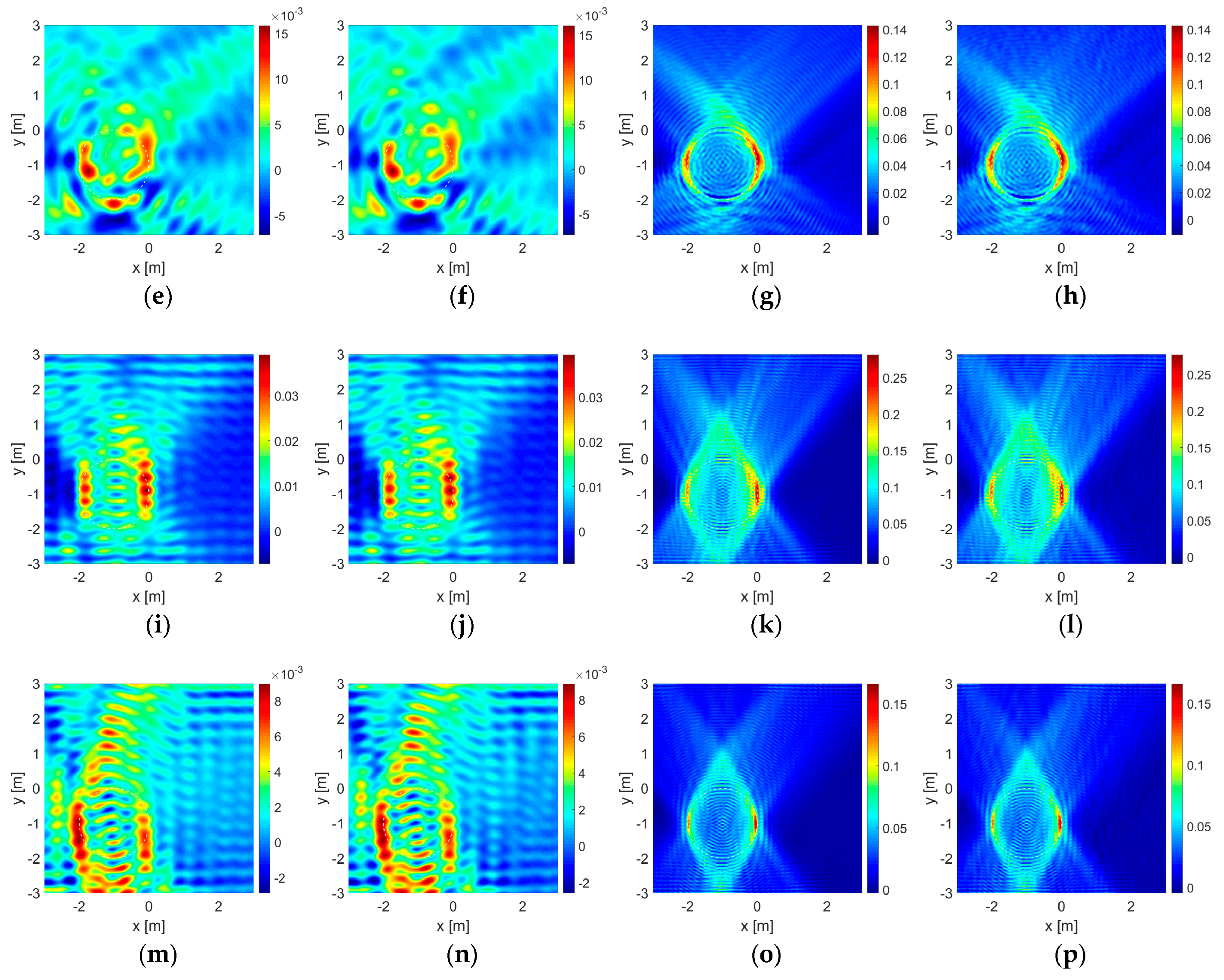
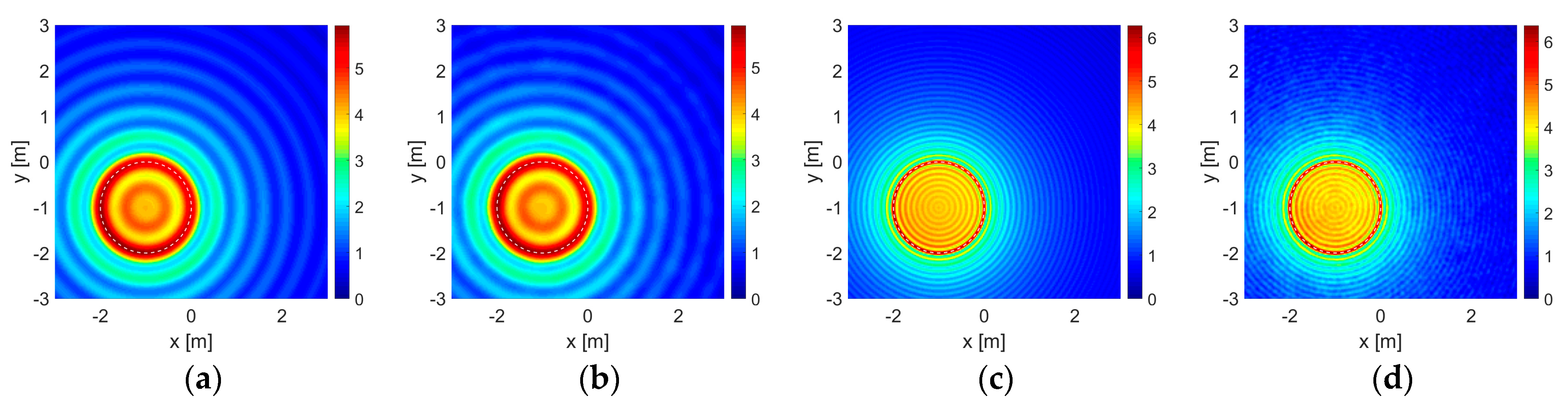
4. Numerical Experiments and Discussion
- The first set, , is formed by points of source and observation uniformly located within the range on one side of the wall at and the same on the other side at being in total illuminating the area of the size . With this set, it is possible to perform a double-sided illumination and measurement;
- In the second and third sets, and , are formed by using only the upper half and the lower half of the first set located at the same line segments at and , respectively: and . One-sided illumination and measurement is performed in case one of the two sides of a wall is inaccessible;
- There is also a zeroth set, , formed by different points of source and observation, which are uniformly distributed on a circle with radius and illuminating the same size of the area as that in the first set and it is given only in the absence of the wall for comparison.
- First, a dielectric object of penetrable material with a contrast ratio of ;
- Additionally, an air gap only in the presence of the wall, again, as a penetrable material, with a contrast ratio of ;
- Thirdly, a PEC object of non-penetrable material.
- A unit circle, bigger in size carrying a basic curvature property;
- A point body that stands for smaller objects being poor in structural properties.
- In the center or the middle point of the reconstruction domain, ;
- In an unbalanced location in the horizontal direction, ;
- In an unbalanced location in the vertical direction, ;
- In a fully unbalanced location in both the horizontal and the vertical directions, .
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RTM | reverse time migration |
| TWI | through-wall imaging |
| 3D | three-dimensional |
| 2D | two-dimensional |
| GPR | ground penetrating radar |
| TM | transverse magnetic |
| PEC | perfect electric conductor |
| MSE | mean squared error |
| SIP | Sommerfeld integration path |
Appendix A
References
- Baysal, E.; Kosloffs, D.D.; Sherwood, J.W.C. Reverse time migration. Geophysics 1983, 48, 1514–1524. [Google Scholar] [CrossRef]
- Yilmaz, Ö. Seismic Data Analysis; Society of Exploration Geophysicists: Tulsa, OK, USA, 2001. [Google Scholar] [CrossRef]
- Chang, W.-F.; McMechan, G.A. Reverse-time migration of offset vertical seismic profiling data using the excitation-time imaging condition. Geophysics 1986, 51, 67–84. [Google Scholar] [CrossRef]
- Zhu, J.; Lines, L.R. Comparing of Kirchhoff and reverse-time migration methods with applications to prestack depth imaging of complex structures. Geophysics 1998, 63, 1166–1176. [Google Scholar] [CrossRef]
- Bradford, J.H.; Privette, J.; Wilkins, D.; Ford, R. Reverse-Time Migration from Rugged Topography to Image Ground-Penetrating Radar Data in Complex Environments. Engineering 2018, 4, 661–666. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Colton, D.; Kirsch, A. A simple method for solving inverse scattering problems in the resonance region. Inverse Probl. 1996, 12, 383–393. [Google Scholar] [CrossRef]
- Kirsch, A. Characterization of the shape of a scattering obstacle using the spectral data of the far field operator. Inverse Probl. 1998, 14, 1489–1512. [Google Scholar] [CrossRef]
- Kirsch, A.; Grinberg, N. The Factorization Method for Inverse Problems; Oxford University Press: Oxford, UK, 2008. [Google Scholar] [CrossRef]
- Potthast, R. A fast new method to solve inverse scattering problems. Inverse Probl. 1996, 12, 731–742. [Google Scholar] [CrossRef]
- Potthast, R. Point Sources and Multipoles in Inverse Scattering Theory; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Z.; Huang, G. Reverse time migration for extended obstacles: Acoustic waves. Inverse Probl. 2013, 29, 085005. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, G. Reverse time migration for reconstructing extended obstacles in planar acoustic waveguides. Sci. China Math. 2015, 58, 1811–1834. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, G. Reverse time migration for reconstructing extended obstacles in the half space. Inverse Probl. 2015, 31, 055007. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, G. Phaseless Imaging by Reverse Time Migration: Acoustic Waves. Numer. Math. Theor. Meth. Appl. 2017, 10, 1–21. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Z.; Huang, G. Reverse time migration for extended obstacles: Electromagnetic waves. Inverse Probl. 2013, 29, 085006. [Google Scholar] [CrossRef]
- Chen, J.; Huang, G. A Direct Imaging Method for Inverse Electromagnetic Scattering Problem in Rectangular Waveguide. Commun. Comput. Phys. 2018, 23, 1415–1433. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, G. A Direct Imaging Method for Electromagnetic Scattering Data without Phase Information. SIAM J. Imaging Sci. 2016, 9, 1273–1297. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Lu, G.; Bi, X. Reverse-Time Migration Based Optical Imaging. IEEE Trans. Med. Imaging 2016, 35, 273–281. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zhou, S. A direct imaging method for half-space inverse elastic scattering problems. Inverse Probl. 2019, 35, 075004. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar] [CrossRef]
- Amin, M.; Sarabandi, K. Special Issue on Remote Sensing of Building Interior. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1267–1268. [Google Scholar] [CrossRef]
- Liu, H.; Long, Z.; Tian, B.; Han, F.; Fang, G.; Liu, Q.H. Two-Dimensional Reverse-Time Migration Applied to GPR With a 3-D-to-2-D Data Conversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4313–4320. [Google Scholar] [CrossRef]
- Li, J.; Bai, L.; Liu, H. Numerical Verification of Full Waveform Inversion for the Chang’E-5 Lunar Regolith Penetrating Array Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5903710. [Google Scholar] [CrossRef]
- Fisher, E.; McMechan, G.A.; Annan, A.P.; Cosway, S.W. Examples of reverse-time migration of single-channel, ground-penetrating radar profiles. Geophysics 1992, 57, 577–586. [Google Scholar] [CrossRef]
- Zhou, H.; Sato, M. Subsurface cavity imaging by crosshole borehole radar measurements. IEEE Trans. Geosci. Remote Sens. 2004, 42, 335–341. [Google Scholar] [CrossRef]
- Bradford, J.H. Reverse-time prestack depth migration of GPR data from topography for amplitude reconstruction in complex environments. J. Earth Sci. 2015, 26, 791–798. [Google Scholar] [CrossRef]
- Tan, Y.; Chen, Z.; Liu, H.; Meng, X.; Zhou, B.; Fang, G. Image Reconstruction and Interpretation of Chang’ e-5 Lunar Regolith Penetrating Radar Data. In Proceedings of the 2022 45th International Conference on Telecommunications and Signal Processing (TSP), Virtual, 13–15 July 2022; pp. 242–245. [Google Scholar] [CrossRef]
- Liu, H.; Long, Z.; Han, F.; Fang, G.; Liu, Q.H. Frequency-Domain Reverse-Time Migration of Ground Penetrating Radar Based on Layered Medium Green’s Functions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2957–2965. [Google Scholar] [CrossRef]
- Cheng, D.; Zeng, Z.; Hu, Z.; Kang, X. Targets Imaging Method for A New MIMO Through-wall Radar. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Surakarta, Indonesia, 24–25 August 2021; Volume 660, p. 012030. [Google Scholar] [CrossRef]
- Zhang, W.; Li, L.; Li, F. Autofocusing imaging through the unknown building walls. In Proceedings of the 2008 Asia-Pacific Microwave Conference, Hong Kong, China, 16–19 December 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, H.; Li, T.; Li, N.; He, Z.; Liu, Q.H. Time-Gating-Based Time Reversal Imaging for Impulse Borehole Radar in Layered Media. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2695–2705. [Google Scholar] [CrossRef]
- Rao, J.; Saini, A.; Yang, J.; Ratassepp, M.; Fan, Z. Ultrasonic imaging of irregularly shaped notches based on elastic reverse time migration. NDT E Int. 2019, 107, 102135. [Google Scholar] [CrossRef]
- Rao, J.; Wang, J.; Kollmannsberger, S.; Shi, J.; Fu, H.; Rank, E. Point cloud-based elastic reverse time migration for ultrasonic imaging of components with vertical surfaces. Mech. Syst. Signal Process. 2022, 163, 108144. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, X.; Zhang, J.; Jiao, J. An Ultrasonic Reverse Time Migration Imaging Method Based on Higher-Order Singular Value Decomposition. Sensors 2022, 22, 2534. [Google Scholar] [CrossRef]
- Ambrosanio, M.; Pascazio, V. Improving linear inverse scattering in aspect-limited configurations: The Intra-Wall Imaging case. In Proceedings of the 2015 3rd International Workshop on Compressed Sensing Theory and its Applications to Radar, Sonar and Remote Sensing (CoSeRa), Pisa, Italy, 17–19 June 2015; pp. 134–138. [Google Scholar] [CrossRef]
- Catapano, I.; Crocco, L. An imaging tool for intra-wall investigations: A feasibility study. In Proceedings of the XXIXth URSI General Assembly in Chicago, Chicago, IL, USA, 7–16 August 2008. [Google Scholar]
- Brancaccio, A.; Solimene, R.; Prisco, G.; Leone, G.; Pierri, R. Intra-wall diagnostics via a microwave tomographic approach. J. Geophys. Eng. 2011, 8, S47–S53. [Google Scholar] [CrossRef]
- Ren, K.; Burkholder, R.J. Identification of Hidden Objects in Layered Media with Shadow Projection Near-Field Microwave Imaging. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1590–1594. [Google Scholar] [CrossRef]
- Zheng, T.; Chen, Z.; Luo, J.; Ke, L.; Zhao, C.; Yang, Y. SiWa: See into walls via deep UWB radar. In Proceedings of the 27th Annual International Conference on Mobile Computing and Networking, New Orleans, LA, USA, 25–29 October 2021; pp. 323–336. [Google Scholar] [CrossRef]
- Lang, S.A.; Demming, M.; Jaeschke, T.; Noujeim, K.M.; Konynenberg, A.; Pohl, N. 3D SAR imaging for dry wall inspection using an 80 GHz FMCW radar with 25 GHz bandwidth. In Proceedings of the 2015 IEEE MTT-S International Microwave Symposium, Phoenix, AZ, USA, 17–22 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Soldovieri, F.; Persico, R. Reconstruction of an embedded slab from multifrequency scattered field data under the distorted Born approximation. IEEE Trans. Antennas Propag. 2004, 52, 2348–2356. [Google Scholar] [CrossRef]
- Grosvenor, C.A.; Johnk, R.T.; Baker-Jarvis, J.; Janezic, M.D.; Riddle, B. Time-Domain Free-Field Measurements of the Relative Permittivity of Building Materials. IEEE Trans. Instrum. Meas. 2009, 58, 2275–2282. [Google Scholar] [CrossRef]
- Jemai, J.; Varone, A.; Wagen, J.-F.; Kürner, T. Determination of the permittivity of building materials through WLAN measurements at 2.4 GHz. In Proceedings of the 2005 IEEE 16th International Symposium on Personal, Indoor and Mobile Radio Communications, Berlin, Germany, 11–14 September 2005; pp. 589–593. [Google Scholar] [CrossRef]
- Cuiñas, I.; Sánchez, M.G. Permittivity and Conductivity Measurements of Building Materials at 5.8 GHz and 41.5 GHz. Wirel. Pers. Commun. 2002, 20, 93–100. [Google Scholar] [CrossRef]
- Laurens, S.; Balayssac, J.P.; Rhazi, J.; Klysz, G.; Arliguie, G. Non-destructive evaluation of concrete moisture by GPR: Experimental study and direct modeling. Mater. Struct. 2005, 38, 827–832. [Google Scholar] [CrossRef]
- Kaushal, S.; Singh, D. Role of signal processing for estimating the wall thickness for TWI system. In Proceedings of the 2013 Fourth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Tiruchengode, India, 4–6 July 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Liu, H.; Huang, C.; Gan, L.; Zhou, Y.; Truong, T.-K. Clutter Reduction and Target Tracking in Through-the-Wall Radar. IEEE Trans. Geosci. Remote Sens. 2020, 58, 486–499. [Google Scholar] [CrossRef]
- Yoon, Y.-S.; Amin, M.G. Spatial Filtering for Wall-Clutter Mitigation in Through-the-Wall Radar Imaging. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3192–3208. [Google Scholar] [CrossRef]
- Anwar, N.S.N.; Abdullah, M.Z. Clutter suppression in through-the-wall radar imaging using enhanced delay-and-sum beamformer. In Proceedings of the 2014 IEEE International Conference on Imaging Systems and Techniques (IST) Proceedings, Santorini, Greece, 14–17 October 2014; pp. 179–183. [Google Scholar] [CrossRef]
- Solimene, R.; Soldovieri, F.; Baratonia, A.; Pierri, R. Experimental Validation of a Linear Inverse Scattering TWI Algorithm by a SF-CW Radar. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 506–509. [Google Scholar] [CrossRef]
- Pastorino, M. Microwave Imaging; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Nikolova, N.K. Introduction to Microwave Imaging; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Zoughi, R. Microwave Non-Dectructive Testing and Evaluation; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Chew, W.C. Waves and Fields in Inhomogenous Media; IEEE: Manhattan, NY, USA, 1995. [Google Scholar] [CrossRef]
- Harrington, R.F. Field Computation by Moment Methods; IEEE: Manhattan, NY, USA, 1993. [Google Scholar] [CrossRef]
- Peterson, A.F.; Ray, S.L.; Mittra, R. Computational Methods for Electromagnetics; IEEE: Manhattan, NY, USA, 1998. [Google Scholar] [CrossRef]
- Colton, D.; Kress, R. Integral Equation Methods in Scattering Theory; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2013. [Google Scholar] [CrossRef]
- Kroese, D.P.; Brereton, T.; Taimre, T.; Botev, Z.I. Why the Monte Carlo method is so important today. Wiley Interdiscip. Rev. Comput. Stat. 2014, 6, 386–392. [Google Scholar] [CrossRef]
- Unwin, D.J. Introductory Spatial Analysis; Taylor & Francis: Abingdon, UK, 1981; p. 188. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perfectly Surrounding | Double-Sided | One-Sided Upper|Lower | Overall | ||
|---|---|---|---|---|---|
| with in the absence of the wall | 96.78 | 96.78 | |||
| with in the absence of the wall | 82.62 | ||||
| with in the presence of the wall | 83.68 |
| Dielectric | Air Gap | PEC | Overall | ||
|---|---|---|---|---|---|
| with in the absence of the wall | 96.78 | ||||
| with in the absence of the wall | 82.62 | ||||
| with in the presence of the wall | 83.68 |
| Unit Circle | Point Body | Overall | ||
|---|---|---|---|---|
| with in the absence of the wall | 96.78 | |||
| with in the absence of the wall | 82.62 | |||
| with in the presence of the wall | 83.68 |
| Overall | ||||||
|---|---|---|---|---|---|---|
| with in the absence of the wall | 96.78 | |||||
| with in the absence of the wall | 82.62 | |||||
| with in the presence of the wall | 83.68 |
| Overall | |||||
|---|---|---|---|---|---|
| with in the absence of the wall | 96.78 | ||||
| with in the absence of the wall | 82.62 | ||||
| with in the presence of the wall | 83.68 |
| Overall | ||||||
|---|---|---|---|---|---|---|
| with in the absence of the wall | 96.78 | |||||
| with in the absence of the wall | 82.62 | |||||
| with in the presence of the wall | 83.68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yarar, M.L.; Yapar, A. In-Wall Imaging for the Reconstruction of Obstacles by Reverse Time Migration. Sensors 2023, 23, 4456. https://doi.org/10.3390/s23094456
Yarar ML, Yapar A. In-Wall Imaging for the Reconstruction of Obstacles by Reverse Time Migration. Sensors. 2023; 23(9):4456. https://doi.org/10.3390/s23094456
Chicago/Turabian StyleYarar, M. Lütfi, and Ali Yapar. 2023. "In-Wall Imaging for the Reconstruction of Obstacles by Reverse Time Migration" Sensors 23, no. 9: 4456. https://doi.org/10.3390/s23094456