
External Human–Machine Interfaces for Automated Vehicles in Shared Spaces: A Review of the Human–Computer Interaction Literature

Abstract
:1. Introduction
1.1. Related Work
1.2. Objectives
- It provides an overview of the current and fast-growing research into eHMI design and evaluation focusing on how vehicles and VRUs communicate, the characteristics of external human–machine interface technologies, and the subsequent evaluation of the interfaces.
- In addition to the research overview, it provides a critical review of the applications of various VRU-vehicle communication and eHMI technologies in shared spaces.
- More importantly, it highlights research gaps within the literature surrounding the use of eHMIs for VRU-AV communication and interaction and provides recommendations for the direction of future research.
1.3. Vulnerable Road Users
1.4. Automated Vehicles
1.5. Shared Spaces
A street or place designed to improve pedestrian movement and comfort by reducing the dominance of motor vehicles and enabling all users to share the space rather than follow the clearly defined rules implied by more conventional designs (p. 6–currently suspended).
1.5.1. Types of Shared Spaces
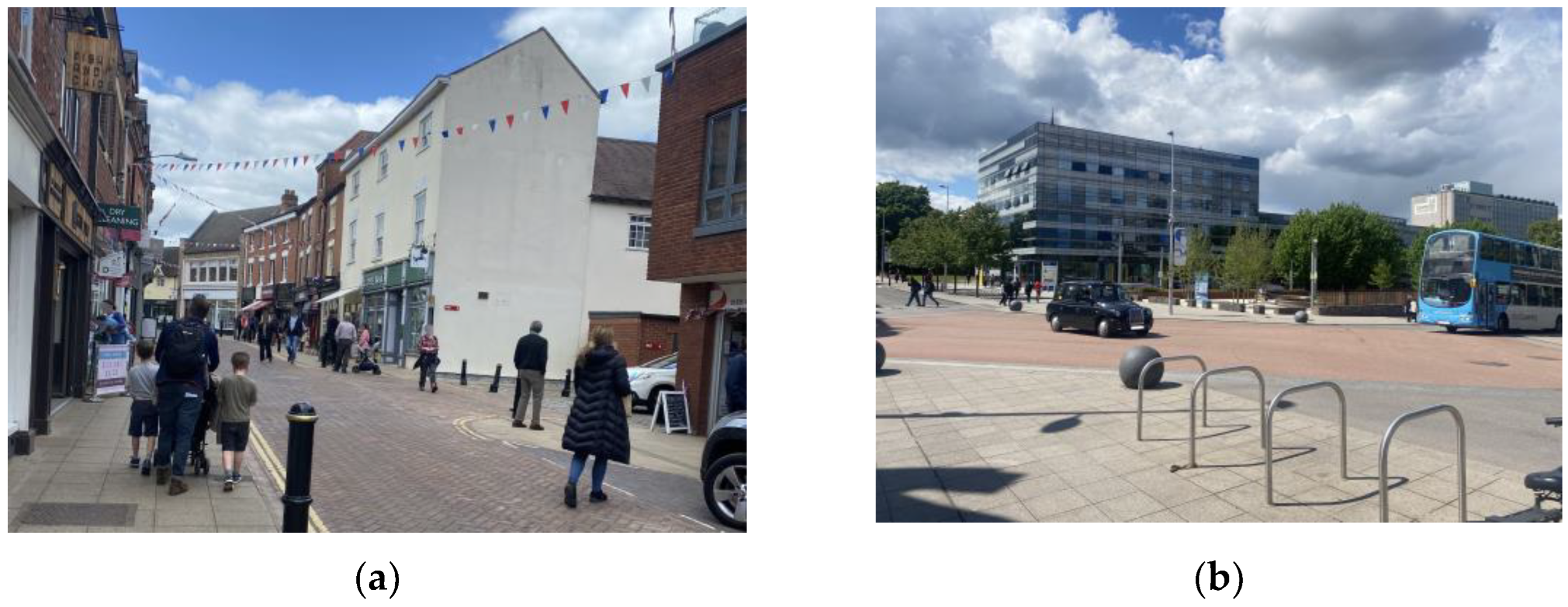
- Pedestrian Prioritized Street (PPS): PPSs will not have well-defined carriageways so users of the space do not assume that pedestrians must cross at a defined crosswalk or seek drivers’ consent to cross. To emphasize the space as a place to be enjoyed, PPSs will generally have a level surface made up of similar paving types and colors across the whole of the space, and seating or other street furniture placed in the street. An example of a PPS can be seen in Figure 1.
- Informal Street: Informal streets will generally have a defined carriageway but will have an absence of or reduction in formal traffic control measures (such as traffic signals or zebra crossings), particularly at junctions [38,40]. While these spaces can in-principle contain dedicated cycling infrastructure, such as cycling lanes, they are not a hallmark of the space. An example of an informal street and an informal junction can be seen in Figure 2.
- Enhanced Street: Enhanced streets are on the limit of what can be called a shared space; they are conventional streets where care has been taken to improve the quality of the space through the removal of unnecessary street clutter and the introduction of features such as seating or street trees. Conventional traffic engineering features, such as junctions controlled by traffic signals or give way markings, are retained. An example of an enhanced street can be seen in Figure 3.
1.5.2. VRU-Vehicle Interactions in Shared Spaces
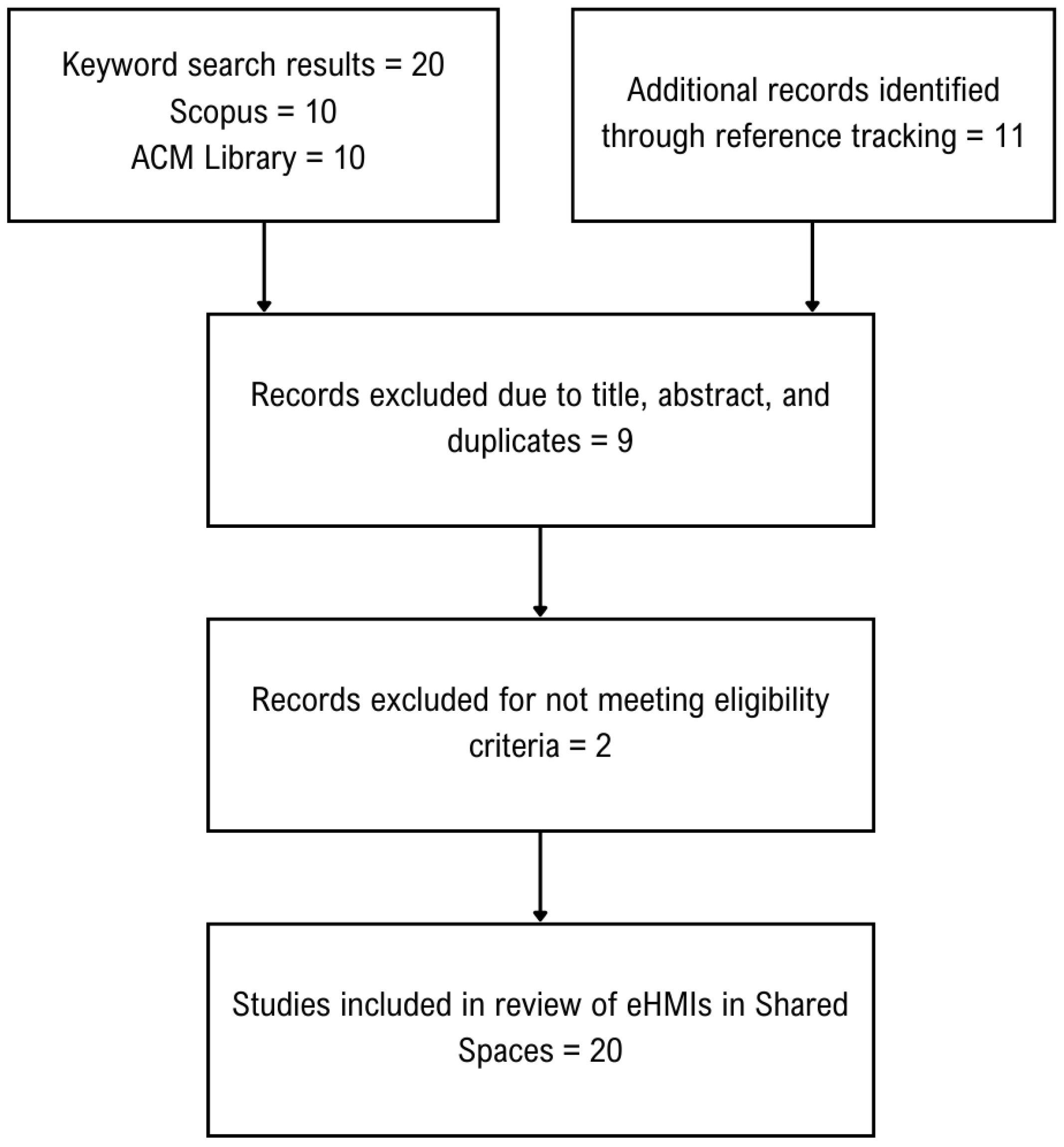
2. Methodology
- Papers in peer-reviewed journals, peer-reviewed conference proceedings, and reports of normal academic standards;
- Written in the English Language;
- The full text was accessible.
3. Results
3.1. External Human—Machine Interfaces
3.2. VRU-Vehicle Communication
3.3. eHMI Technologies
3.4. Visual eHMIs
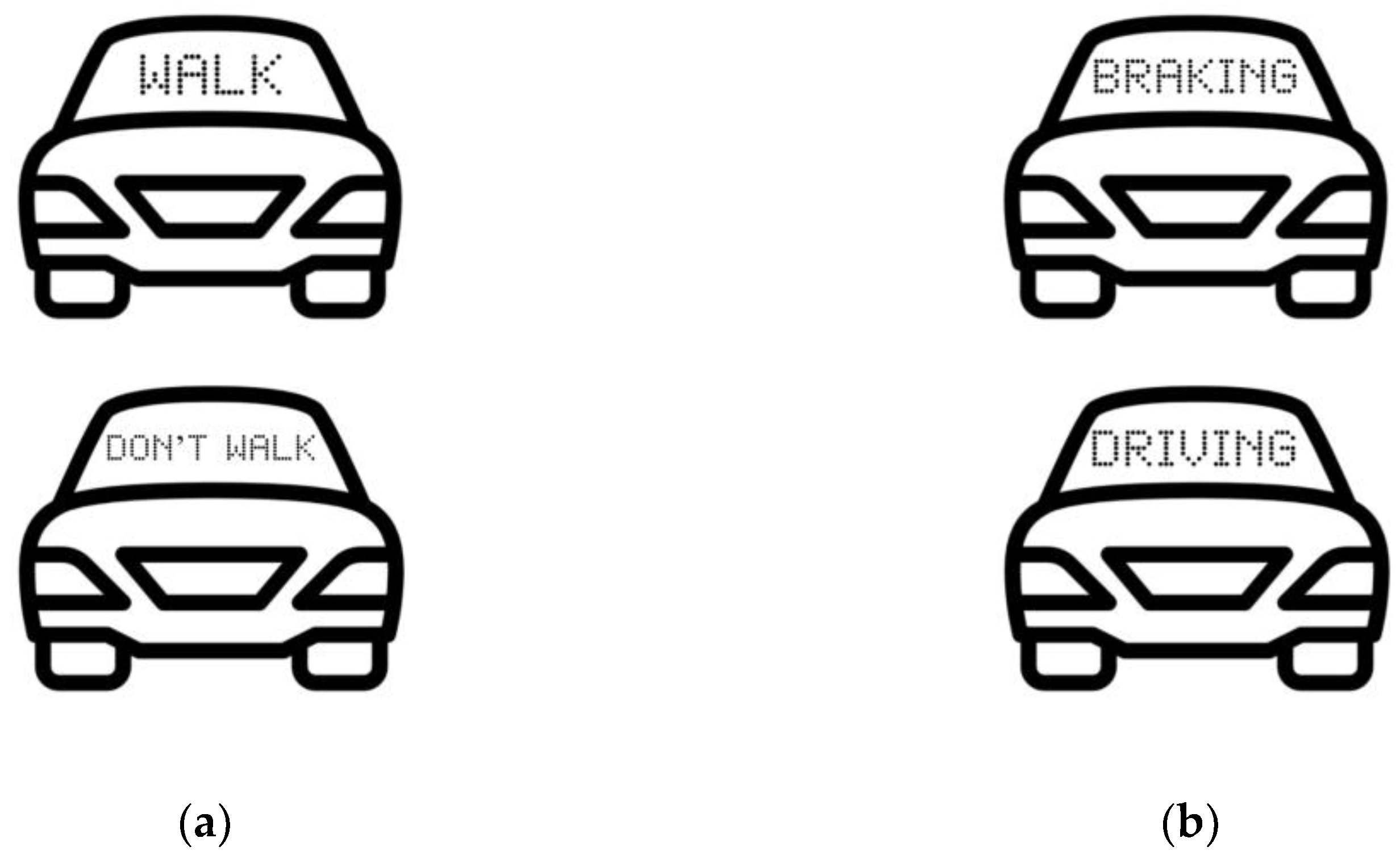
3.4.1. Text-Based eHMIs
3.4.2. Icon-Based eHMIs
3.4.3. Anthropomorphic eHMIs
3.4.4. Abstract eHMIs
3.4.5. eHMI Location
3.4.6. Color of Displays
3.5. Auditory eHMIs
3.5.1. Speech-Based eHMIs
3.5.2. Abstract Sounds
3.6. eHMIs on Personal Devices
3.7. Message Perspective
3.8. Intended Target
3.9. Accessibility
3.10. Evaluation of eHMIs
3.10.1. Methodology
3.10.2. Dependent Variables
3.10.3. Independent Variables
3.11. VRU–Vehicle Communication in Shared Spaces
3.12. eHMIs in Shared Spaces
3.12.1. eHMI Technologies
3.12.2. Methodology
3.12.3. Findings
4. Discussion
5. Conclusions and Future Research
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Payre, W.; Birrell, S.; Parkes, A.M. Although autonomous cars are not yet manufactured, their acceptance already is. Theor. Issues Ergon. Sci. 2021, 22, 567–580. [Google Scholar] [CrossRef]
- Carmona, J.; Guindel, C.; Garcia, F.; de la Escalera, A. eHMI: Review and Guidelines for Deployment on Autonomous Vehicles. Sensors 2021, 21, 2912. [Google Scholar] [CrossRef] [PubMed]
- Dey, D.; Habibovic, A.; Löcken, A.; Wintersberger, P.; Pfleging, B.; Riener, A.; Martens, M.; Terken, J. Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles’ external human-machine interfaces. Transp. Res. Interdiscip. Perspect. 2020, 7, 100174. [Google Scholar] [CrossRef]
- Rouchitsas, A.; Alm, H. External Human–Machine Interfaces for Autonomous Vehicle-to-Pedestrian Communication: A Review of Empirical Work. Front. Psychol. 2019, 10, 2757. [Google Scholar] [CrossRef] [PubMed]
- Dey, D.; Matviienko, A.; Berger, M.; Pfleging, B.; Martens, M.; Terken, J. Communicating the intention of an automated vehicle to pedestrians: The contributions of eHMI and vehicle behavior. IT—Inf. Technol. 2021, 63, 123–141. [Google Scholar] [CrossRef]
- Lee, J.; Daimon, T.; Kitazaki, S. Negative Effect of External Human-Machine Interfaces in Automated Vehicles on Pedestrian Crossing Behaviour: A Virtual Reality Experiment. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021) Volume III: Sector Based Ergonomics, Virtual, 13–18 June 2021; Springer International Publishing: Cham, Switzerland, 2021; pp. 718–725. [Google Scholar]
- de Winter, J.; Dodou, D. External human–machine interfaces: Gimmick or necessity? Transp. Res. Interdiscip. Perspect. 2022, 15, 100643. [Google Scholar] [CrossRef]
- Prédhumeau, M.; Spalanzani, A.; Dugdale, J. Pedestrian Behavior in Shared Spaces With Autonomous Vehicles: An Integrated Framework and Review. IEEE Trans. Intell. Veh. 2023, 8, 438–457. [Google Scholar] [CrossRef]
- Das, S.; Dutta, A.; Fitzpatrick, K. Technological perception on autonomous vehicles: Perspectives of the non-motorists. Technol. Anal. Strateg. Manag. 2020, 32, 1335–1352. [Google Scholar] [CrossRef]
- Hagenzieker, M.P.; van der Kint, S.; Vissers, L.; van Schagen, I.N.L.G.; de Bruin, J.; van Gent, P.; Commandeur, J.J.F. Interactions between cyclists and automated vehicles: Results of a photo experiment*. J. Transp. Saf. Secur. 2020, 12, 94–115. [Google Scholar] [CrossRef]
- Abdullah, M.; Dias, C.; Muley, D.; Shahin, M. Exploring the impacts of COVID-19 on travel behavior and mode preferences. Transp. Res. Interdiscip. Perspect. 2020, 8, 100255. [Google Scholar] [CrossRef]
- Harrington, D.M.; Hadjiconstantinou, M. Changes in commuting behaviours in response to the COVID-19 pandemic in the UK. J. Transp. Health 2022, 24, 101313. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Hayashi, Y.; Frank, L.D. COVID-19 and transport: Findings from a world-wide expert survey. Transp. Policy 2021, 103, 68–85. [Google Scholar] [CrossRef] [PubMed]
- United Nations. Road Safety Strategy; United Nations: Geneva, Switzerland, 2019. [Google Scholar]
- TfL. Vision Zero Action Plan; TfL: London, UK, 2018. [Google Scholar]
- Yannis, G.; Nikolaou, D.; Laiou, A.; Stürmer, Y.A.; Buttler, I.; Jankowska-Karpa, D. Vulnerable road users: Cross-cultural perspectives on performance and attitudes. IATSS Res. 2020, 44, 220–229. [Google Scholar] [CrossRef]
- Ye, W.; Wang, C.; Chen, F.; Yan, S.; Li, L. Approaching autonomous driving with cautious optimism: Analysis of road traffic injuries involving autonomous vehicles based on field test data. Inj. Prev. 2021, 27, 42. [Google Scholar] [CrossRef] [PubMed]
- DfT. Reported Road Casualties Great Britain, Annual Report: 2020; DfT: London, UK, 2021. [Google Scholar]
- BITRE. Road Trauma Australia: 2020 Statistical Survey; BITRE: Canberra, Australia, 2021. [Google Scholar]
- DfT. The Impact of Lockdown on Reported Road Casualties Great Britain, Final Results: 2020; DfT: London, UK, 2021. [Google Scholar]
- NHTSA. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; US Department for Transportation: Washington, DC, USA, 2018. [Google Scholar]
- Bazilinskyy, P.; Sakuma, T.; de Winter, J. What driving style makes pedestrians think a passing vehicle is driving automatically? Appl. Ergon. 2021, 95, 103428. [Google Scholar] [CrossRef] [PubMed]
- Combs, T.S.; Sandt, L.S.; Clamann, M.P.; McDonald, N.C. Automated Vehicles and Pedestrian Safety: Exploring the Promise and Limits of Pedestrian Detection. Am. J. Prev. Med. 2019, 56, 1–7. [Google Scholar] [CrossRef]
- Penmetsa, P.; Adanu, E.K.; Wood, D.; Wang, T.; Jones, S.L. Perceptions and expectations of autonomous vehicles—A snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Change 2019, 143, 9–13. [Google Scholar] [CrossRef]
- Xing, Y.; Zhou, H.; Han, X.; Zhang, M.; Lu, J. What influences vulnerable road users’ perceptions of autonomous vehicles? A comparative analysis of the 2017 and 2019 Pittsburgh surveys. Technol. Forecast. Soc. Change 2022, 176, 121454. [Google Scholar] [CrossRef]
- Lanzer, M.; Babel, F.; Yan, F.; Zhang, B.; You, F.; Wang, J.; Baumann, M. Designing Communication Strategies of Autonomous Vehicles with Pedestrians: An Intercultural Study. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, New York, NY, USA, 21–22 September 2020; pp. 122–131. [Google Scholar]
- Rothenbücher, D.; Li, J.; Sirkin, D.; Mok, B.; Ju, W. Ghost driver: A field study investigating the interaction between pedestrians and driverless vehicles. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 795–802. [Google Scholar]
- Woodman, R.; Lu, K.; Higgins, M.D.; Brewerton, S.; Jennings, P.A.; Birrell, S. Gap acceptance study of pedestrians crossing between platooning autonomous vehicles in a virtual environment. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 1–14. [Google Scholar] [CrossRef]
- Björklund, G.M.; Åberg, L. Driver behaviour in intersections: Formal and informal traffic rules. Transp. Res. Part F Traffic Psychol. Behav. 2005, 8, 239–253. [Google Scholar] [CrossRef]
- Habibovic, A.; Davidsson, J. Causation mechanisms in car-to-vulnerable road user crashes: Implications for active safety systems. Accid. Anal. Prev. 2012, 49, 493–500. [Google Scholar] [CrossRef] [PubMed]
- Otte, D.; Jänsch, M.; Haasper, C. Injury protection and accident causation parameters for vulnerable road users based on German In-Depth Accident Study GIDAS. Accid. Anal. Prev. 2012, 44, 149–153. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, A.; Waterson, B.; Snell, I. Human perceptions of vehicle turning intention: Overall performance and contributory factors. Transp. Res. Rec. 2014, 2458, 8–15. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, W.; Zhuang, X.; Ma, G. Pedestrian time-to-arrival judgment of vehicles in naturalistic traffic scenes. In Proceedings of the 2021 6th International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 22–24 October 2021; pp. 1342–1347. [Google Scholar]
- Moore, D.; Currano, R.; Strack, G.E.; Sirkin, D. The Case for Implicit External Human-Machine Interfaces for Autonomous Vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, New York, NY, USA, 22–25 September 2019; pp. 295–307. [Google Scholar]
- Merat, N.; Louw, T.; Madigan, R.; Wilbrink, M.; Schieben, A. What externally presented information do VRUs require when interacting with fully Automated Road Transport Systems in shared space? Accid. Anal. Prev. 2018, 118, 244–252. [Google Scholar] [CrossRef] [PubMed]
- Uttley, J.; Lee, Y.M.; Madigan, R.; Merat, N. Road user interactions in a shared space setting: Priority and communication in a UK car park. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 32–46. [Google Scholar] [CrossRef]
- Duncan, A.B. Shared Space. In International Encyclopedia of Transportation; Elsevier: Amsterdam, The Netherlands, 2021; pp. 584–592. [Google Scholar]
- Beck, M.J.; Hensher, D.A. Insights into the impact of COVID-19 on household travel and activities in Australia—The early days under restrictions. Transp. Policy 2020, 96, 76–93. [Google Scholar] [CrossRef]
- DfT, U.K. Shared Space; Stationery Office: London, UK, 2011; p. 55. ISBN 9780115532092. [Google Scholar]
- Lee, H.; Kim, S.-N. Shared Space and Pedestrian Safety: Empirical Evidence from Pedestrian Priority Street Projects in Seoul, Korea. Sustainability 2019, 11, 4645. [Google Scholar] [CrossRef]
- Karndacharuk, A.; Vasisht, P.; Prasad, M. Shared Space Evaluation: O’Connell Street, Auckland. In Proceedings of the Australasian Transport Research Forum 2015, Sydney, Australia, 30 September–2 October 2015. [Google Scholar]
- Reid, S.; Kocak, N.; Hunt, L. Department for Transport Shared Space Project Stage 1: Appraisal of Shared Space; MVA Consultancy: London, UK, 2009. [Google Scholar]
- CIHT. Creating Better Streets: Inclusive and Accessible Places; CIHT: England, UK, 2018. [Google Scholar]
- Moody, S.; Melia, S. Shared space—Research, policy and problems. Proc. Inst. Civ. Eng.-Transp. 2014, 167, 384–392. [Google Scholar] [CrossRef]
- Hamilton-Baillie, B. Shared Space: Reconciling People, Places and Traffic. Built Environ. 2008, 34, 161–181. [Google Scholar] [CrossRef]
- Kaparias, I.; Bell, M.G.H.; Biagioli, T.; Bellezza, L.; Mount, B. Behavioural analysis of interactions between pedestrians and vehicles in street designs with elements of shared space. Transp. Res. Part F Traffic Psychol. Behav. 2015, 30, 115–127. [Google Scholar] [CrossRef]
- Burns, C.G.; Oliveira, L.; Hung, V.; Thomas, P.; Birrell, S. Pedestrian Attitudes to Shared-Space Interactions with Autonomous Vehicles—A Virtual Reality Study. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, San Diego, CA, USA, 16–20 July 2020; pp. 307–316. [Google Scholar]
- Madigan, R.; Nordhoff, S.; Fox, C.; Ezzati Amini, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. Understanding interactions between Automated Road Transport Systems and other road users: A video analysis. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 196–213. [Google Scholar] [CrossRef]
- Kaparias, I.; Bell, M.; Singh, A.; Dong, W.; Sastrawinata, A.; Wang, X.; Mount, B. Analysing the perceptions and behaviour of cyclists in street environments with elements of shared space. In Proceedings of the 45th Annual Conference of the Universities’ Transport Study Group, Oxford, UK, 2–4 January 2013. [Google Scholar]
- Duncan, A. A comparative analysis of cyclists’ paths through shared space and non-shared intersections in Coventry, England. J. Urban Des. 2017, 22, 833–844. [Google Scholar] [CrossRef]
- Berge, S.H.; Hagenzieker, M.; Farah, H.; de Winter, J. Do cyclists need HMIs in future automated traffic? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2022, 84, 33–52. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 89. [Google Scholar] [CrossRef]
- Ackermans, S.; Dey, D.; Ruijten, P.; Cuijpers, R.H.; Pfleging, B. The Effects of Explicit Intention Communication, Conspicuous Sensors, and Pedestrian Attitude in Interactions with Automated Vehicles. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–14. [Google Scholar]
- Dey, D.; Terken, J. Pedestrian Interaction with Vehicles. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, New York, NY, USA, 24–27 September 2017; pp. 109–113. [Google Scholar]
- Daimon, T.; Taima, M.; Kitazaki, S. Pedestrian Carelessness toward Traffic Environment Due to External Human–Machine Interfaces of Automated Vehicles. J. Traffic Logist. Eng. 2021, 9, 42–47. [Google Scholar] [CrossRef]
- Clamann, M.P.; Aubert, M.C.; Cummings, M.L. Evaluation of Vehicle-to-Pedestrian Communication Displays for Autonomous Vehicles. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 12–16 January 2017. [Google Scholar]
- Müller, L.; Risto, M.; Emmenegger, C. The social behavior of autonomous vehicles. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct, New York, NY, USA, 12–16 September 2016; pp. 686–689. [Google Scholar]
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef]
- Vinkhuyzen, E.; Cefkin, M. Developing Socially Acceptable Autonomous Vehicles. Ethnogr. Prax. Ind. Conf. Proc. 2016, 2016, 522–534. [Google Scholar] [CrossRef]
- Habibovic, A.; Lundgren, V.M.; Andersson, J.; Klingegård, M.; Lagström, T.; Sirkka, A.; Fagerlönn, J.; Edgren, C.; Fredriksson, R.; Krupenia, S.; et al. Communicating Intent of Automated Vehicles to Pedestrians. Front. Psychol. 2018, 9, 1336. [Google Scholar] [CrossRef]
- Faas, S.M.; Mathis, L.-A.; Baumann, M. External HMI for self-driving vehicles: Which information shall be displayed? Transp. Res. Part F Traffic Psychol. Behav. 2020, 68, 171–186. [Google Scholar] [CrossRef]
- Lundgren, V.M.; Habibovic, A.; Andersson, J.; Lagström, T.; Nilsson, M.; Sirkka, A.; Fagerlönn, J.; Fredriksson, R.; Edgren, C.; Krupenia, S.; et al. Will There Be New Communication Needs When Introducing Automated Vehicles to the Urban Context? In Proceedings of the Advances in Human Aspects of Transportation, Orlando, FL, USA, 27–31 July 2017; pp. 485–497. [Google Scholar]
- Mahadevan, K.; Somanath, S.; Sharlin, E. Communicating Awareness and Intent in Autonomous Vehicle-Pedestrian Interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Eisma, Y.B.; Reiff, A.; Kooijman, L.; Dodou, D.; de Winter, J.C.F. External human-machine interfaces: Effects of message perspective. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 30–41. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Kooijman, L.; Dodou, D.; de Winter, J.C.F. How should external human-machine interfaces behave? Examining the effects of colour, position, message, activation distance, vehicle yielding, and visual distraction among 1434 participants. Appl. Ergon. 2021, 95, 103450. [Google Scholar] [CrossRef]
- Rouchitsas, A.; Alm, H. Ghost on the Windshield: Employing a Virtual Human Character to Communicate Pedestrian Acknowledgement and Vehicle Intention. Information 2022, 13, 420. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Dodou, D.; de Winter, J. Survey on eHMI concepts: The effect of text, color, and perspective. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 175–194. [Google Scholar] [CrossRef]
- Eisele, D.; Petzoldt, T. Effects of traffic context on eHMI icon comprehension. Transp. Res. Part F Traffic Psychol. Behav. 2022, 85, 1–12. [Google Scholar] [CrossRef]
- Holländer, K.; Colley, A.; Mai, C.; Häkkilä, J.; Alt, F.; Pfleging, B. Investigating the Influence of External Car Displays on Pedestrians’ Crossing Behavior in Virtual Reality. In Proceedings of the 21st International Conference on Human-Computer Interaction with Mobile Devices and Services, Taipei, Taiwan, 1–4 October 2019; pp. 1–11. [Google Scholar]
- de Clercq, K.; Dietrich, A.; Núñez Velasco, J.P.; de Winter, J.; Happee, R. External Human-Machine Interfaces on Automated Vehicles: Effects on Pedestrian Crossing Decisions. Hum. Factors J. Hum. Factors Ergon. Soc. 2019, 61, 1353–1370. [Google Scholar] [CrossRef]
- Chang, C.-M. A gender study of communication interfaces between an autonomous car and a pedestrian. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual, 21–22 September 2020; pp. 42–45. [Google Scholar]
- Chang, C.-M.; Toda, K.; Sakamoto, D.; Igarashi, T. Eyes on a Car: An Interface Design for Communication between an Autonomous Car and a Pedestrian. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017; pp. 65–73. [Google Scholar]
- Lee, Y.M.; Madigan, R.; Uzondu, C.; Garcia, J.; Romano, R.; Markkula, G.; Merat, N. Learning to interpret novel eHMI: The effect of vehicle kinematics and eHMI familiarity on pedestrian’ crossing behavior. J. Saf. Res. 2022, 80, 270–280. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Holländer, K.; Hoggenmueller, M.; Parker, C.; Tomitsch, M. Designing for Projection-based Communication between Autonomous Vehicles and Pedestrians. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 22–25 September 2019; pp. 284–294. [Google Scholar]
- SAE. Color Specification: Lighting Standard Practices Committee RATIONALE; SAE: New York, NY, USA, 2016. [Google Scholar]
- UNECE. Regulation No. 65 Uniform Provisions Concerning the Approval of Special Warning Lamps for Power-Driven Vehicles and Their Trailers; UNECE: Geneva, Switzerland, 2011. [Google Scholar]
- Tiesler-Wittig, H. Functional Application, Regulatory Requirements and Their Future Opportunities for Lighting of Automated Driving Systems; SAE: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- von Sawitzky, T.; Grauschopf, T.; Riener, A. Hazard Notifications for Cyclists: Comparison of Awareness Message Modalities in a Mixed Reality Study. In Proceedings of the 27th International Conference on Intelligent User Interfaces, Helsinki, Finland, 22–25 March 2022; pp. 310–322. [Google Scholar]
- Rahimian, P.; O’Neal, E.E.; Yon, J.P.; Franzen, L.; Jiang, Y.; Plumert, J.M.; Kearney, J.K. Using a virtual environment to study the impact of sending traffic alerts to texting pedestrians. In Proceedings of the 2016 IEEE Virtual Reality (VR), Greenville, SC, USA, 19–23 March 2016; pp. 141–149. [Google Scholar]
- Cœugnet, S.; Dommes, A.; Panëels, S.; Chevalier, A.; Vienne, F.; Dang, N.-T.; Anastassova, M. Helping older pedestrians navigate unknown environments through vibrotactile guidance instructions. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 816–830. [Google Scholar] [CrossRef]
- The Highway Code; Department for Transport: London, UK, 2022.
- Vlakveld, W.; van der Kint, S.; Hagenzieker, M.P. Cyclists’ intentions to yield for automated cars at intersections when they have right of way: Results of an experiment using high-quality video animations. Transp. Res. Part F Traffic Psychol. Behav. 2020, 71, 288–307. [Google Scholar] [CrossRef]
- Colley, M.; Walch, M.; Gugenheimer, J.; Rukzio, E. Including people with impairments from the start: External communication of autonomous vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings, Utrecht, The Netherlands, 21–25 September 2019; pp. 307–314. [Google Scholar]
- Deb, S.; Carruth, D.W.; Sween, R.; Strawderman, L.; Garrison, T.M. Efficacy of virtual reality in pedestrian safety research. Appl. Ergon. 2017, 65, 449–460. [Google Scholar] [CrossRef]
- Tran, T.; Parker, C.; Tomitsch, M. A Review of Virtual Reality Studies on Autonomous Vehicle–Pedestrian Interaction. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 641–652. [Google Scholar] [CrossRef]
- Nuñez Velasco, J.P.; Farah, H.; van Arem, B.; Hagenzieker, M.P. Studying pedestrians’ crossing behavior when interacting with automated vehicles using virtual reality. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 1–14. [Google Scholar] [CrossRef]
- Colley, M.; Wankmüller, B.; Mend, T.; Väth, T.; Rukzio, E.; Gugenheimer, J. User gesticulation inside an automated vehicle with external communication can cause confusion in pedestrians and a lower willingness to cross. Transp. Res. Part F Traffic Psychol. Behav. 2022, 87, 120–137. [Google Scholar] [CrossRef]
- Song, Y.E.; Lehsing, C.; Fuest, T.; Bengler, K. External HMIs and Their Effect on the Interaction Between Pedestrians and Automated Vehicles. In Proceedings of the Intelligent Human Systems Integration, Dubai, United Arab Emirates, 7–9 January 2018; pp. 13–18. [Google Scholar]
- Jian, J.-Y.; Bisantz, A.M.; Drury, C.G. Foundations for an Empirically Determined Scale of Trust in Automated Systems. Int. J. Cogn. Ergon. 2000, 4, 53–71. [Google Scholar] [CrossRef]
- Gutzwiller, R.S.; Chiou, E.K.; Craig, S.D.; Lewis, C.M.; Lematta, G.J.; Hsiung, C.-P. Positive bias in the ‘Trust in Automated Systems Survey’? An examination of the Jian et al. (2000) scale. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Seattle, WA, USA, 28 October–1 November 2019; Volume 63, pp. 217–221. [Google Scholar] [CrossRef]
- Kooijman, L.; Happee, R.; de Winter, J. How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit. Information 2019, 10, 386. [Google Scholar] [CrossRef]
- Hart, S.G. NASA-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef]
- Bindschädel, J.; Krems, I.; Kiesel, A. Active vehicle pitch motion for communication in automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2022, 87, 279–294. [Google Scholar] [CrossRef]
- Wang, P.; Motamedi, S.; Qi, S.; Zhou, X.; Zhang, T.; Chan, C.-Y. Pedestrian interaction with automated vehicles at uncontrolled intersections. Transp. Res. Part F Traffic Psychol. Behav. 2021, 77, 10–25. [Google Scholar] [CrossRef]
- Löcken, A.; Golling, C.; Riener, A. How Should Automated Vehicles Interact with Pedestrians? In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; pp. 262–274. [Google Scholar]
- Li, Y.; Cheng, H.; Zeng, Z.; Liu, H.; Sester, M. Autonomous Vehicles Drive into Shared Spaces: eHMI Design Concept Focusing on Vulnerable Road Users. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 1729–1736. [Google Scholar]
- Lee, Y.M.; Madigan, R.; Giles, O.; Garach-Morcillo, L.; Markkula, G.; Fox, C.; Camara, F.; Rothmueller, M.; Vendelbo-Larsen, S.A.; Rasmussen, P.H. Road users rarely use explicit communication when interacting in today’s traffic: Implications for automated vehicles. Cogn. Technol. Work 2021, 23, 367–380. [Google Scholar] [CrossRef]
- Wang, Y.; Hespanhol, L.; Worrall, S.; Tomitsch, M. Pedestrian-Vehicle Interaction in Shared Space: Insights for Autonomous Vehicles. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seoul, Republic of Korea, 17–20 September 2022; pp. 330–339. [Google Scholar]
- von Sawitzky, T.; Wintersberger, P.; Löcken, A.; Frison, A.-K.; Riener, A. Augmentation Concepts with HUDs for Cyclists to Improve Road Safety in Shared Spaces. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–9. [Google Scholar]
- Lau, M.; Jipp, M.; Oehl, M. Investigating the Interplay between eHMI and dHMI for Automated Buses: How Do Contradictory Signals Influence a Pedestrian’s Willingness to Cross? In Proceedings of the 13th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Leeds, UK, 9–14 September 2021; pp. 152–155. [Google Scholar]
- Lau, M.; Jipp, M.; Oehl, M. One Solution Fits All? Evaluating Different Communication Strategies of a Light-based External Human-Machine Interface for Differently Sized Automated Vehicles from a Pedestrian’s Perspective. Accid. Anal. Prev. 2022, 171, 106641. [Google Scholar] [CrossRef]
- Lau, M.; Jipp, M.; Oehl, M. Toward a Holistic Communication Approach to an Automated Vehicle’s Communication With Pedestrians: Combining Vehicle Kinematics With External Human-Machine Interfaces for Differently Sized Automated Vehicles. Front. Psychol. 2022, 13, 882394. [Google Scholar] [CrossRef]
- Lau, M.; Le, D.H.; Oehl, M. Design of External Human-Machine Interfaces for Different Automated Vehicle Types for the Interaction with Pedestrians on a Shared Space. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), Cham, Switzerland, 13–18 June 2021; pp. 710–717. [Google Scholar]
- Hensch, A.-C.; Neumann, I.; Beggiato, M.; Halama, J.; Krems, F.J. Effects of a light-based communication approach as an external HMI for Automated Vehicles—A Wizard-of-Oz Study. Trans. Transp. Sci. 2020, 10, 18–32. [Google Scholar] [CrossRef]
- Joisten, P.; Schwindt, S.S.; Theobald, N.; Abendroth, B. Pedestrians’ Mental Model Development after Initial Encounters with Automated Driving Systems. In Proceedings of the 33rd European Conference on Cognitive Ergonomics, Kaiserslautern, Germany, 4–7 October 2022; p. 14. [Google Scholar]
- Hensch, A.-C.; Kreißig, I.; Beggiato, M.; Krems, J.F. The Effects of eHMI Failures on Elderly Participants’ Assessment of Automated Vehicle Communication Signals. In Proceedings of the Human Interaction, Emerging Technologies and Future Systems V, Cham, Switzerland, 3 May 2022; pp. 355–363. [Google Scholar]
- Hoggenmueller, M.; Tomitsch, M.; Worrall, S. Designing Interactions With Shared AVs in Complex Urban Mobility Scenarios. Front. Comput. Sci. 2022, 4, 866258. [Google Scholar] [CrossRef]
- Alvarez, W.M.; de Miguel, M.A.; Garcia, F.; Olaverri-Monreal, C. Response of Vulnerable Road Users to Visual Information from Autonomous Vehicles in Shared Spaces. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3714–3719. [Google Scholar]
- Burns, C.G.; Oliveira, L.; Thomas, P.; Iyer, S.; Birrell, S. Pedestrian Decision-Making Responses to External Human-Machine Interface Designs for Autonomous Vehicles. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 70–75. [Google Scholar]
- Oehl, M.; Lau, M.; Gehreke, L.; Wilbrink, M. Towards a Universal Explicit Communication Design of External Human-Machine Interfaces (eHMI) for Differently Sized Highly Automated Vehicles Evaluated by Different Pedestrian Age Groups. In Proceedings of the HCI International 2022—Late Breaking Posters, Cham, Switzerland, 27 May 2022; pp. 391–398. [Google Scholar]
- Hensch, A.-C.; Kreißig, I.; Beggiato, M.; Krems, J.F. The Effect of eHMI Malfunctions on Younger and Elderly Pedestrians’ Trust and Acceptance of Automated Vehicle Communication Signals. Front. Psychol. 2022, 13, 866475. [Google Scholar] [CrossRef] [PubMed]
- Payre, W.; Diels, C. Designing in-vehicle signs for connected vehicle features: Does appropriateness guarantee comprehension? Appl. Ergon. 2019, 80, 102–110. [Google Scholar] [CrossRef] [PubMed]
- Colley, M.; Walch, M.; Rukzio, E. Unveiling the Lack of Scalability in Research on External Communication of Autonomous Vehicles. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 25–30 April 2020; pp. 1–9. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Research Question | eHMI Description | Methodology | General Findings |
|---|---|---|---|---|
| [52] |
|
|
|
|
| [97] |
|
|
|
|
| [110] |
|
|
|
|
| [101] |
|
|
|
|
| [102] |
|
|
|
|
| [103] |
|
|
|
|
| [104] |
|
|
|
|
| [111] |
|
|
|
|
| [105] |
|
|
|
|
| [112] |
|
|
|
|
| [107] |
|
|
|
|
| [109] |
|
|
|
|
| [108] |
|
|
|
|
| [100] |
|
|
|
|
| [106] |
|
|
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brill, S.; Payre, W.; Debnath, A.; Horan, B.; Birrell, S. External Human–Machine Interfaces for Automated Vehicles in Shared Spaces: A Review of the Human–Computer Interaction Literature. Sensors 2023, 23, 4454. https://doi.org/10.3390/s23094454
Brill S, Payre W, Debnath A, Horan B, Birrell S. External Human–Machine Interfaces for Automated Vehicles in Shared Spaces: A Review of the Human–Computer Interaction Literature. Sensors. 2023; 23(9):4454. https://doi.org/10.3390/s23094454
Chicago/Turabian StyleBrill, Sarah, William Payre, Ashim Debnath, Ben Horan, and Stewart Birrell. 2023. "External Human–Machine Interfaces for Automated Vehicles in Shared Spaces: A Review of the Human–Computer Interaction Literature" Sensors 23, no. 9: 4454. https://doi.org/10.3390/s23094454