
Would You Trust Driverless Service? Formation of Pedestrian’s Trust and Attitude Using Non-Verbal Social Cues

 , , and
, , and
Abstract
:1. Introduction
2. Background
2.1. A Review of Previous Studies
2.1.1. Trust Formation in Social Pedestrian-AV Interaction
2.1.2. Non-Verbal Social Cues for the Formation of Trust through Intimacy
2.1.3. Brand Attitude as a Subjective/Emotional Attitude toward Service
2.2. Research Model
3. Methods
3.1. Stimuli
3.1.1. Design and Development
3.1.2. Manipulation Check
3.2. Experiment
3.2.1. Participants
3.2.2. Process
3.3. Measurement
3.3.1. Intimacy
3.3.2. Trust
3.3.3. Brand Attitude
3.3.4. Validity and Reliability
3.4. Data Analysis
3.4.1. Quantitative Analyses
3.4.2. Qualitative Analyses
4. Results
4.1. Results of Quantitative Analyses
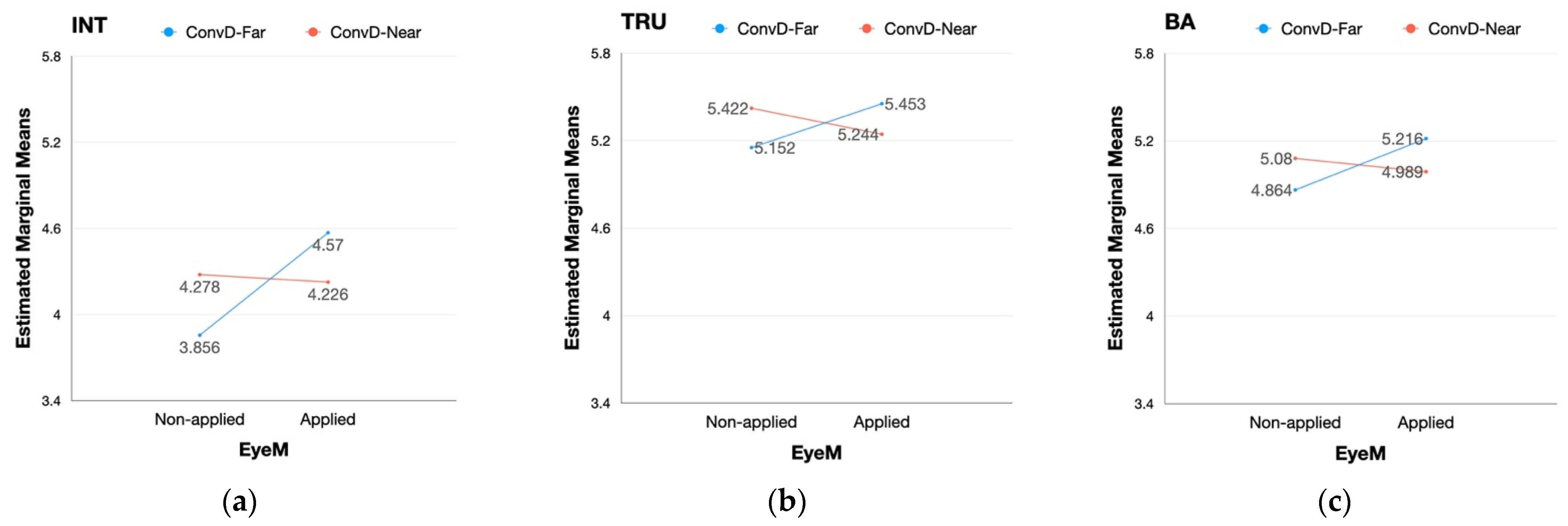
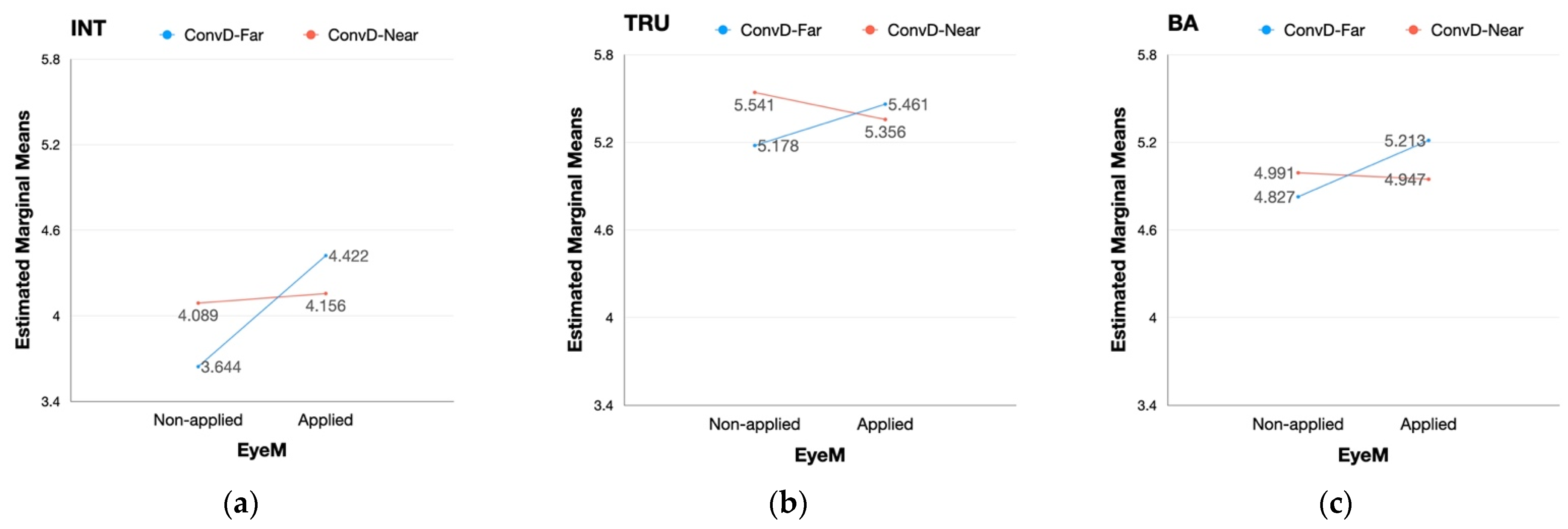
4.1.1. Effect of Non-Verbal Social Cues on Intimacy, Trust, and Brand Attitude
4.1.2. The Relationships among Intimacy, Trust, and Brand Attitude
4.2. Results of Qualitative Analyses
5. Discussion
5.1. Consideration of Service Context
5.2. Sociality vs. Task
5.3. Psychological Zoning
5.4. Comprehensive Discussion for Limitation and Future Work
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construct | Item | Outer Loading | Cronbach’s Alpha | Composite Reliability | AVE |
|---|---|---|---|---|---|
| Intimacy | INT01 | 0.946 | 0.935 | 0.959 | 0.886 |
| INT02 | 0.938 | ||||
| INT03 | 0.940 | ||||
| Trust | TRU01 | 0.925 | 0.907 | 0.942 | 0.844 |
| TRU02 | 0.924 | ||||
| TRU03 | 0.907 | ||||
| Brand Attitude | BA01 | 0.928 | 0.957 | 0.967 | 0.853 |
| BA02 | 0.937 | ||||
| BA03 | 0.923 | ||||
| BA04 | 0.908 | ||||
| BA05 | 0.946 |
| Case | Construct | Item | Outer Loading | Cronbach’s Alpha | Composite Reliability | AVE |
|---|---|---|---|---|---|---|
| 1A | Intimacy | INT01 | 0.943 | 0.938 | 0.960 | 0.889 |
| INT02 | 0.941 | |||||
| INT03 | 0.945 | |||||
| Trust | TRU01 | 0.869 | 0.816 | 0.891 | 0.731 | |
| TRU02 | 0.853 | |||||
| TRU03 | 0.843 | |||||
| Brand Attitude | BA01 | 0.927 | 0.939 | 0.954 | 0.806 | |
| BA02 | 0.922 | |||||
| BA03 | 0.870 | |||||
| BA04 | 0.853 | |||||
| BA05 | 0.915 | |||||
| 1B | Intimacy | INT01 | 0.95 | 0.953 | 0.970 | 0.915 |
| INT02 | 0.949 | |||||
| INT03 | 0.970 | |||||
| Trust | TRU01 | 0.929 | 0.895 | 0.935 | 0.827 | |
| TRU02 | 0.909 | |||||
| TRU03 | 0.890 | |||||
| Brand Attitude | BA01 | 0.918 | 0.948 | 0.960 | 0.829 | |
| BA02 | 0.923 | |||||
| BA03 | 0.930 | |||||
| BA04 | 0.875 | |||||
| BA05 | 0.906 | |||||
| 1C | Intimacy | INT01 | 0.947 | 0.911 | 0.943 | 0.846 |
| INT02 | 0.905 | |||||
| INT03 | 0.906 | |||||
| Trust | TRU01 | 0.902 | 0.915 | 0.947 | 0.855 | |
| TRU02 | 0.960 | |||||
| TRU03 | 0.912 | |||||
| Brand Attitude | BA01 | 0.937 | 0.968 | 0.975 | 0.886 | |
| BA02 | 0.953 | |||||
| BA03 | 0.951 | |||||
| BA04 | 0.922 | |||||
| BA05 | 0.944 | |||||
| 1D | Intimacy | INT01 | 0.960 | 0.911 | 0.943 | 0.846 |
| INT02 | 0.955 | |||||
| INT03 | 0.947 | |||||
| Trust | TRU01 | 0.955 | 0.915 | 0.947 | 0.855 | |
| TRU02 | 0.939 | |||||
| TRU03 | 0.945 | |||||
| Brand Attitude | BA01 | 0.944 | 0.968 | 0.975 | 0.886 | |
| BA02 | 0.930 | |||||
| BA03 | 0.944 | |||||
| BA04 | 0.934 | |||||
| BA05 | 0.938 |
| Case | Construct | Item | Outer Loading | Cronbach’s Alpha | Composite Reliability | AVE |
|---|---|---|---|---|---|---|
| 2A | Intimacy | INT01 | 0.960 | 0.914 | 0.946 | 0.854 |
| INT02 | 0.955 | |||||
| INT03 | 0.947 | |||||
| Trust | TRU01 | 0.955 | 0.865 | 0.917 | 0.786 | |
| TRU02 | 0.939 | |||||
| TRU03 | 0.945 | |||||
| Brand Attitude | BA01 | 0.944 | 0.938 | 0.953 | 0.801 | |
| BA02 | 0.930 | |||||
| BA03 | 0.944 | |||||
| BA04 | 0.934 | |||||
| BA05 | 0.938 | |||||
| 2B | Intimacy | INT01 | 0.910 | 0.911 | 0.944 | 0.848 |
| INT02 | 0.928 | |||||
| INT03 | 0.925 | |||||
| Trust | TRU01 | 0.932 | 0.904 | 0.940 | 0.838 | |
| TRU02 | 0.910 | |||||
| TRU03 | 0.904 | |||||
| Brand Attitude | BA01 | 0.913 | 0.961 | 0.970 | 0.865 | |
| BA02 | 0.963 | |||||
| BA03 | 0.944 | |||||
| BA04 | 0.900 | |||||
| BA05 | 0.930 | |||||
| 2C | Intimacy | INT01 | 0.970 | 0.959 | 0.974 | 0.925 |
| INT02 | 0.946 | |||||
| INT03 | 0.969 | |||||
| Trust | TRU01 | 0.970 | 0.949 | 0.967 | 0.908 | |
| TRU02 | 0.947 | |||||
| TRU03 | 0.942 | |||||
| Brand Attitude | BA01 | 0.955 | 0.969 | 0.976 | 0.891 | |
| BA02 | 0.957 | |||||
| BA03 | 0.940 | |||||
| BA04 | 0.951 | |||||
| BA05 | 0.916 | |||||
| 2D | Intimacy | INT01 | 0.956 | 0.925 | 0.952 | 0.869 |
| INT02 | 0.907 | |||||
| INT03 | 0.934 | |||||
| Trust | TRU01 | 0.949 | 0.953 | 0.969 | 0.914 | |
| TRU02 | 0.968 | |||||
| TRU03 | 0.951 | |||||
| Brand Attitude | BA01 | 0.941 | 0.963 | 0.971 | 0.870 | |
| BA02 | 0.934 | |||||
| BA03 | 0.91 | |||||
| BA04 | 0.955 | |||||
| BA05 | 0.922 |
| Construct | HTMT |
|---|---|
| Intimacy → Brand Attitude | 0.659 |
| Trust → Brand Attitude | 0.763 |
| Trust → Intimacy | 0.402 |
| Case | Construct | HTMT |
|---|---|---|
| 1A | Intimacy → Brand Attitude | 0.781 |
| Trust → Brand Attitude | 0.688 | |
| Trust → Intimacy | 0.406 | |
| 1B | Intimacy → Brand Attitude | 0.578 |
| Trust → Brand Attitude | 0.802 | |
| Trust → Intimacy | 0.308 | |
| 1C | Intimacy → Brand Attitude | 0.663 |
| Trust → Brand Attitude | 0.763 | |
| Trust → Intimacy | 0.482 | |
| 1D | Intimacy → Brand Attitude | 0.711 |
| Trust → Brand Attitude | 0.862 | |
| Trust → Intimacy | 0.607 |
| Case | Construct | HTMT |
|---|---|---|
| 2A | Intimacy → Brand Attitude | 0.617 |
| Trust → Brand Attitude | 0.704 | |
| Trust → Intimacy | 0.316 | |
| 2B | Intimacy → Brand Attitude | 0.565 |
| Trust → Brand Attitude | 0.794 | |
| Trust → Intimacy | 0.459 | |
| 2C | Intimacy → Brand Attitude | 0.684 |
| Trust → Brand Attitude | 0.689 | |
| Trust → Intimacy | 0.259 | |
| 2D | Intimacy → Brand Attitude | 0.629 |
| Trust → Brand Attitude | 0.809 | |
| Trust → Intimacy | 0.386 |
| Construct | Q2 |
|---|---|
| Brand Attitude | 0.557 |
| Trust | 0.114 |
| Case | Construct | Q2 |
|---|---|---|
| 1A | Brand Attitude | 0.518 |
| Trust | 0.07 | |
| 1B | Brand Attitude | 0.543 |
| Trust | 0.051 | |
| 1C | Brand Attitude | 0.551 |
| Trust | 0.155 | |
| 1D | Brand Attitude | 0.622 |
| Trust | 0.269 |
| Case | Construct | Q2 |
|---|---|---|
| 2A | Brand Attitude | 0.437 |
| Trust | 0.041 | |
| 2B | Brand Attitude | 0.501 |
| Trust | 0.135 | |
| 2C | Brand Attitude | 0.596 |
| Trust | 0.038 | |
| 2D | Brand Attitude | 0.564 |
| Trust | 0.106 |
| Source | Measures | F Statistic F(1, 44) | Significance Level (p-Value) | Partial Eta Square (ηp2) |
|---|---|---|---|---|
| SCENE | INT | 5.191 | 0.028 * | 0.106 |
| TRU | 1.639 | 0.207 | 0.036 | |
| BA | 0.618 | 0.436 | 0.014 | |
| EyeM | INT | 7.707 | 0.008 ** | 0.149 |
| TRU | 1.845 | 0.181 | 0.040 | |
| BA | 3.548 | 0.066 | 0.075 | |
| ConvD | INT | 0.109 | 0.742 | 0.002 |
| TRU | 0.143 | 0.707 | 0.003 | |
| BA | 0.003 | 0.959 | 0.000 | |
| SCENE * EyeM | INT | 1.894 | 0.176 | 0.041 |
| TRU | 0.073 | 0.788 | 0.002 | |
| BA | 1.070 | 0.307 | 0.024 | |
| SCENE * ConvD | INT | 0.340 | 0.563 | 0.008 |
| TRU | 3.317 | 0.075 | 0.070 | |
| BA | 0.498 | 0.484 | 0.011 | |
| EyeM * ConvD | INT | 27.991 | 0.000 *** | 0.389 |
| TRU | 23.121 | 0.000 *** | 0.344 | |
| BA | 17.529 | 0.000 *** | 0.285 | |
| SCENE * EyeM * ConvD | INT | 0.149 | 0.702 | 0.003 |
| TRU | 0.010 | 0.919 | 0.000 | |
| BA | 0.013 | 0.909 | 0.000 |
| Source | Measures | F Statistic F(1, 44) | Significance Level (p-Value) | Partial Eta Square (ηp2) | Observed Power |
|---|---|---|---|---|---|
| EyeM | INT | 3.835 | 0.057 | 0.080 | 0.793 |
| TRU | 1.545 | 0.220 | 0.034 | 0.105 | |
| BA | 1.573 | 0.216 | 0.035 | 0.481 | |
| ConvD | INT | 0.007 | 0.932 | 0.000 | 0.085 |
| TRU | 0.536 | 0.468 | 0.012 | 0.225 | |
| BA | 0.162 | 0.689 | 0.004 | 0.063 | |
| EyeM * ConvD | INT | 11.890 | 0.001 ** | 0.213 | 0.989 |
| TRU | 14.934 | 0.000 *** | 0.253 | 0.837 | |
| BA | 9.718 | 0.003 ** | 0.181 | 0.850 |
| Source | Measures | F Statistic F(1, 44) | Significance Level (p-Value) | Partial Eta Square (ηp2) | Observed Power |
|---|---|---|---|---|---|
| EyeM | INT | 8.607 | 0.007 ** | 0.155 | 0.482 |
| TRU | 0.492 | 0.487 | 0.011 | 0.229 | |
| BA | 3.821 | 0.057 | 0.080 | 0.233 | |
| ConvD | INT | 0.309 | 0.581 | 0.007 | 0.051 |
| TRU | 1.509 | 0.226 | 0.033 | 0.111 | |
| BA | 0.119 | 0.732 | 0.003 | 0.068 | |
| EyeM * ConvD | INT | 18.963 | 0.00 *** | 0.301 | 0.921 |
| TRU | 9.063 | 0.004 ** | 0.171 | 0.966 | |
| BA | 9.389 | 0.004 ** | 0.176 | 0.862 |
References
- Ekman, F.; Johansson, M.; Sochor, J. Creating Appropriate Trust in Automated Vehicle Systems: A Framework for HMI Design. IEEE Trans. Hum. Mach. Syst. 2018, 48, 95–101. [Google Scholar] [CrossRef]
- Hengstler, M.; Enkel, E.; Duelli, S. Applied Artificial Intelligence and Trust—The Case of Autonomous Vehicles and Medical Assistance Devices. Technol. Forecast. Soc. Chang. 2016, 105, 105–120. [Google Scholar] [CrossRef]
- Meschtscherjakov, A.; Tscheligi, M.; Pfleging, B.; Sadeghian Borojeni, S.; Ju, W.; Palanque, P.; Riener, A.; Mutlu, B.; Kun, A.L. Interacting with Autonomous Vehicles: Learning from Other Domains. In Proceedings of the Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 21–26 April 2018. [Google Scholar]
- Rahimi, A.; Azimi, C.; Jin, X. Investigating generational disparities in attitudes toward automated vehicles and other mobility options. Transp. Res. Part C Emerg. Technol. 2020, 121, 102836. [Google Scholar] [CrossRef]
- She, J.; Neuhoff, J.; Yuan, Q. Shaping Pedestrians’ Trust in Autonomous Vehicles: An Effect of Communication Style, Speed Information, and Adaptive Strategy. J. Mech. Des. 2021, 143, 091401. [Google Scholar] [CrossRef]
- Eden, G. Transforming Cars into Computers: Interdisciplinary Opportunities for HCI. In Proceedings of the 32nd International BCS Human-Computer Interaction Conference, Belfast, UK, 4–6 July 2018. [Google Scholar]
- Pascual-Ferrá, P. The Measurement of Trust in Communication Research Part 2. Commun. Res. Trends 2021, 40, 4–36. [Google Scholar]
- Rotter, J.B. Interpersonal Trust, Trustworthiness, and Gullibility. Am. Psychol. 1980, 35, 1–7. [Google Scholar] [CrossRef]
- Sadigh, D. Influencing Interactions between Human Drivers and Autonomous Vehicles. In Proceedings of the 2019 US Frontiers of Engineering Symposium, North Charleston, SC, USA, 25–27 September 2019. [Google Scholar]
- Schwarting, W.; Pierson, A.; Alonso-Mora, J.; Karaman, S.; Rus, D. Social Behavior for Autonomous Vehicles. Proc. Natl. Acad. Sci. USA 2019, 116, 24972–24978. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Cao, S.; Tang, P. Shaping Driver-Vehicle Interaction in Autonomous Vehicles: How the New in-Vehicle Systems Match the Human Needs. Appl. Ergon. 2021, 90, 103238. [Google Scholar] [CrossRef]
- Xu, W. From Automation to Autonomy and Autonomous Vehicles: Challenges and Opportunities for Human-Computer Interaction. In Interactions, 1st ed.; Wiberg, M., Taylor, A., Rosner, D., Eds.; ACM: New York, NY, USA, 2021; Volume 28, pp. 48–53. [Google Scholar]
- Jafary, B.; Rabiei, E.; Diaconeasa, M.A.; Masoomi, H.; Fiondella, L.; Mosleh, A. A Survey on Autonomous Vehicles Interactions with Human and Other Vehicles. In Proceedings of the Probabilistic Safety Assessment and Management, Los Angeles, CA, USA, 19 September 2018. [Google Scholar]
- Abraham, H.; Lee, C.; Brady, S.; Coughlin, J.F. Autonomous Vehicles and Alternatives to Driving: Trust, Preferences, and Effects of Age. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2016. [Google Scholar]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Raats, K.; Fors, V.; Pink, S. Trusting Autonomous Vehicles: An Interdisciplinary Approach. Transp. Res. Interdiscip. Perspect. 2020, 7, 1–10. [Google Scholar] [CrossRef]
- Chin, W.W. The Partial Least Squares Approach to Structural Equation Modeling. In Modern Methods for Business Research, 1st ed.; Marcoulides, G.A., Ed.; Lawrence Erlbaum Associate Publishers: Mahwah, NJ, USA, 1998; pp. 295–336. [Google Scholar]
- Rouibah, K.; Al-Qirim, N. The Determinants of eWoM in Social Commerce: The Role of Perceived Value, Perceived Enjoyment, Trust, Risks, and Satisfaction. J. Glob. Int. Manag. 2021, 29, 75–102. [Google Scholar] [CrossRef]
- Schoorman, F.D.; Mayer, R.C.; Davis, J.H. An Integrative Model of Organizational Trust: Past, Present, and Future. Acad. Manag. Rev. 2007, 32, 344–354. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.D.; See, K.A. Trust in Automation: Designing for Appropriate Reli-Ance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I.; Fishbein, M. Understanding Attitudes and Predicting Social Behavi-Ior; Prentice-Hall: Englewood, NJ, USA, 1980. [Google Scholar]
- Brattström, A.; Löfsten, H.; Richtnér, A. Creativity, Trust and Systematic Processes in Product Development. Res. Policy 2012, 41, 743–755. [Google Scholar] [CrossRef]
- Madsen, M.; Gregor, S. Measuring human-computer trust. In Proceedings of the 11th Australasian Conference on Information Systems, Brisbane, Australia, 6–8 December 2000. [Google Scholar]
- Chattaraman, V.; Kwon, W.-S.; Gilbert, J.E.; Ross, K. Should AI-Based, Conversational Digital Assistants Employ Social- or Task-Oriented Interaction Style? A Task-Competency and Reciprocity Perspective for Older Adults. Comput. Hum. Behav. 2019, 90, 315–330. [Google Scholar] [CrossRef]
- Song, Y.; Luximon, Y. Trust in AI Agent: A Systematic Review of Facial Anthropomorphic Trustworthiness for Social Robot Design. Sensors 2020, 20, 5087. [Google Scholar] [CrossRef]
- Bstieler, L. Trust Formation in Collaborative New Product Development. J. Prod. Innov. Manag. 2006, 23, 56–72. [Google Scholar] [CrossRef]
- McAllister, D.J. Affect- and Cognition-Based Trust as Foundations for Interpersonal Cooperation in Organizations. Acad. Manag. J. 1995, 38, 24–59. [Google Scholar]
- Lee, S.; Choi, J. Enhancing user experience with conversational agent for movie recommendation: Effects of self-disclosure and reciprocity. Int. J. Hum. Comput. Stud. 2017, 103, 95–105. [Google Scholar] [CrossRef]
- Babel, F.; Kraus, J.; Miller, L.; Kraus, M.; Wagner, N.; Minker, W.; Baumann, M. Small Talk with a Robot? The Impact of Dialog Content, Talk Initiative, and Gaze Behavior of a Social Robot on Trust, Acceptance, and Proximity. Int. J. Soc. Robot. 2021, 13, 1485–1498. [Google Scholar] [CrossRef]
- Bainbridge, W.A.; Hart, J.; Kim, E.S.; Scassellati, B. The Effect of Presence on Human-Robot Interaction. In Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication RO-MAN, Munich, Germany, 1–3 August 2008. [Google Scholar]
- Barber, B. The Logic and Limits of Trust; Rutgers University Press: New Brunswick, NJ, USA, 1986. [Google Scholar]
- van den Brule, R.; Dotsch, R.; Bijlstra, G.; Wigboldus, D.H.J.; Haselager, P. Do Robot Performance and Behavioral Style Affect Human Trust?: A Multi-Method Approach. Int. J. Soc. Robot. 2014, 6, 519–531. [Google Scholar] [CrossRef]
- Berscheid, E.; Snyder, M.; Omoto, A.M. The relationship closeness inventory: Assessing the closeness of interpersonal relationships. J. Personal. Soc. Psychol. 1989, 57, 792–807. [Google Scholar] [CrossRef]
- Trauer, B.; Ryan, C. Destination image, romance, and place experience—An application of intimacy theory in tourism. Tour. Manag. 2005, 7, 481–491. [Google Scholar] [CrossRef]
- Ponder, N.; Holloway, B.B.; Hansen, J.D. The mediating effects of customers’ intimacy perceptions on the trust-commitment relationship. J. Serv. Mark. 2016, 30, 75–87. [Google Scholar] [CrossRef]
- Araujo, T. Living up to the Chatbot Hype: The Influence of Anthropomorphic Design Cues and Communicative Agency Framing on Conversational Agent and Company Perceptions. Comput. Hum. Behav. 2018, 85, 183–189. [Google Scholar] [CrossRef]
- Sah, Y.J.; Peng, W. Effects of Visual and Linguistic Anthropomorphic Cues on Social Perception, Self-Awareness, and Information Disclosure in a Health Website. Comput. Hum. Behav. 2015, 45, 392–401. [Google Scholar] [CrossRef]
- Patterson, M. Nonverbal Interpersonal Communication. In Oxford Research Encyclopedia of Communication; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Feine, J.; Gnewuch, U.; Morana, S.; Maedche, A. A Taxonomy of Social Cues for Conversational Agents. Int. J. Hum. Comput. Stud. 2019, 132, 138–161. [Google Scholar] [CrossRef]
- Camara, F.; Fox, C. Space Invaders: Pedestrian Proxemic Utility Functions and Trust Zones for Autonomous Vehicle Interactions. Int. J. Soc. Robot. 2021, 13, 1929–1949. [Google Scholar] [CrossRef]
- Admoni, H.; Scassellati, B. Social Eye Gaze in Human-Robot Interaction: A Review. J. Hum. Robot Interact. 2017, 6, 25–63. [Google Scholar] [CrossRef] [Green Version]
- Affanni, A.; Aminosharieh, N.T.; Guerci, S. Development of an EEG Headband for Stress Measurement on Driving Simulators. Sensors 2022, 22, 1785. [Google Scholar] [CrossRef]
- Mavridis, N. A Review of Verbal and Non-Verbal Human–Robot Interactive Communication. Rob. Auton. Syst. 2015, 63, 22–35. [Google Scholar] [CrossRef] [Green Version]
- Pelachaud, C. Multimodal Expressive Embodied Conversational Agents. In Proceedings of the 13th annual ACM international conference on Multimedia, Hilton, Singapore, 6–11 November 2005. [Google Scholar]
- Stanton, C.J.; Stevens, C.J. Don’t Stare at Me: The Impact of a Humanoid Robot’s Gaze upon Trust during a Cooperative Human–Robot Visual Task. Int. J. Soc. Robot. 2017, 9, 745–753. [Google Scholar] [CrossRef]
- Chan, A.P.H.; Tung, V.W.S. Examining the Effects of Robotic Service on Brand Experience: The Moderating Role of Hotel Segment. J. Travel Tour. Mark. 2019, 36, 458–468. [Google Scholar] [CrossRef]
- Hwang, J.; Choe, J.Y.; Kim, H.M.; Kim, J.J. The Antecedents and Consequences of Memorable Brand Experience: Human Baristas versus Robot Baristas. J. Hosp. Tour. Manag. 2021, 48, 561–571. [Google Scholar] [CrossRef]
- Nysveen, H.; Pedersen, P.E.; Skard, S. Brand Experiences in Service Organizations: Exploring the Individual Effects of Brand Experience Dimensions. J. Brand Manag. 2013, 20, 404–423. [Google Scholar] [CrossRef]
- Bligin, Y. The Effect of Social Media Marketing Activities on Brand Awareness, Brand Image and Brand Loyalty. BMI J. 2018, 6, 128–148. [Google Scholar] [CrossRef]
- Keller, K.L. Building strong brands in a modern marketing communications environment. J. Mark. Commun. 2009, 15, 139–155. [Google Scholar] [CrossRef]
- Keller, K.L. Conceptualizing, Measuring, and Managing Customer-Based Brand Equity. J. Mark. 1993, 57, 1–22. [Google Scholar] [CrossRef]
- Faircloth, J.B.; Capella, L.M.; Alford, B.L. The Effect of Brand Attitude and Brand Image on Brand Equity. J. Mark. Theory Pract. 2001, 9, 61–75. [Google Scholar]
- Spears, N.; Singh, S.N. Measuring Attitude toward the Brand and Purchas Intentions. J. Curr. Issues Res. Advert. 2004, 26, 53–66. [Google Scholar] [CrossRef]
- Amaoka, T.; Laga, H.; Saito, S.; Nakajima, M. Personal Space Modeling for Human-Computer Interaction. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; pp. 60–72. [Google Scholar]
- Global, B. Driverless Shuttles. Available online: https://www.bosch.com/stories/driverless-shuttles/ (accessed on 2 March 2022).
- Self-Driving Shuttle for Passenger Transportation. Available online: https://navya.tech/en/solutions/moving-people/self-driving-shuttle-for-passenger-transportation/ (accessed on 1 March 2022).
- Domino’s Self-Driving Delivery. Available online: https://selfdrivingdelivery.dominos.com/en (accessed on 2 March 2022).
- Browne, M. Walmart Goes Fully Driverless in Delivery Pilot in Bentonville. Available online: https://www.supermarketnews.com/technology/walmart-goes-fully-driverless-delivery-pilot-bentonville (accessed on 2 March 2022).
- Agustin, F. Uber Will Launch Driverless Food Deliveries in California in 2022. Available online: https://www.businessinsider.com/uber-to-launch-driverless-delivery-pilot-program-in-2022-2021-12?amp (accessed on 2 March 2022).
- Driverless Deliveries: How Close Are We? Available online: https://knowledge.wharton.upenn.edu/article/driverless-deliveries-how-close-are-we/ (accessed on 2 March 2022).
- Hou, M.; Mahadevan, K.; Somanath, S.; Sharlin, E.; Oehlberg, L. Autonomous Vehicle-Cyclist Interaction: Peril and Promise. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar]
- Behance. Available online: https://www.behance.net/gallery/99094395/Delivery-Droid?tracking_source=search_projects_comments|autonomousvehicleservice (accessed on 1 September 2021).
- Behance. Available online: https://www.behance.net/gallery/49458187/Groov-Autonomous-public-mobility?tracking_source=search_projects_comments|autonomousvehicleservice (accessed on 1 September 2021).
- Campbell, J.; Thompson, V. MorePower 6.0 for ANOVA with relational confidence intervals and Bayesian analysis. Behav. Res. Methods 2012, 44, 1255–1265. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Das, S.; Maiti, J.; Krishna, O.B. Assessing mental workload in virtual reality based EOT crane operations: A multi-measure approach. Int. J. Ind. Ergon. 2020, 80, 103017. [Google Scholar] [CrossRef]
- Hair, J.; Black, W.C.; Babin, B.J.; Anderson, R.E. Multivariate Data Analysis, 7th ed.; Pearson Education: Upper Saddle River, NJ, USA, 2010; pp. 71–73. [Google Scholar]
- Hair, J.; Hult, T.; Ringle, C.; Sarstedt, M. A Primer on Partial Least Squares Structural Equation Modeling (PLS-SEM), 1st ed.; SAGE: Los Angeles, CA, USA, 2014; pp. 14–24, 102–104. [Google Scholar]
- Hoff, K.A.; Bashir, M. Trust in Automation: Integrating Empirical Evidence on Factors That Influence Trust. Int. J. Hum. Factors Ergon. 2015, 57, 407–434. [Google Scholar] [CrossRef] [PubMed]
- Charness, N.; Yoon, J.S.; Souders, D.; Stothart, C.; Yehnert, C. Predictors of Attitudes toward Autonomous Vehicles: The Roles of Age, Gender, Prior Knowledge, and Personality. Front. Psychol. 2018, 9, 2589. [Google Scholar] [CrossRef]
- Hwang, J.; Hyun, S.S. First-class airline travelers’ tendency to seek uniqueness: How does it influence their purchase of expensive tickets? J. Travel. Tour. Mark. 2017, 34, 935–947. [Google Scholar] [CrossRef]
- Mills, G. Action Research: A Guide for the Teacher Researcher, 1st ed.; Urikyoyuk: Seoul, Korea, 2005; pp. 135–170. [Google Scholar]
- Henseler, J.; Ringle, C.M.; Sarstedt, M.A. New Criterion for Assessing Discriminant Validity in Variance-Based Structural Equation Modeling. J. Acad. Market. Sci. 2015, 43, 115–135. [Google Scholar] [CrossRef] [Green Version]
- Geiser, S. A Predictive Approach to the Random Effects Model. Biometrika 1974, 61, 101–107. [Google Scholar] [CrossRef]
- Stone, M. Cross-Validatory Choice and Assessment of Statistical Predictions. J. R. Stat. Soc. 1974, 36, 111–147. [Google Scholar] [CrossRef]
- Hair, J.; Sarstedt, M.; Hopkins, L.; Kuppelwiser, V.G. Partial least squares structural equation modeling (PLS-SEM): An emerging tool in business research. Eur. Bus. Rev. 2014, 26, 106–121. [Google Scholar] [CrossRef]
- Corbin, J.M.; Strauss, A.C. Basics of Qualitative Research: Techniques and Procedures for Developing Grounded Theory, 3rd ed.; SAGE Publications: Thousand Oaks, CA, USA, 2008; pp. 127–137. [Google Scholar]
- Yu, G. Systematic Approach of Grounded Theory: Thesis Writing Guide, 1st ed.; Parkyoung Story: Seoul, Korea, 2022; pp. 82–183. [Google Scholar]
- Saldaña, J. The Coding Manual for Qualitative Researchers, 1st ed.; SAGE Publications: London, UK, 2009; pp. 159–163. [Google Scholar]
- Merriam, S.B.; Tisdell, E.J. Qualitative Research: A Guide to Design and Implementation, 4th ed.; Jossey-Bass: London, UK, 2015; pp. 213–220. [Google Scholar]
- Wikipedia. Available online: https://en.wikipedia.org/wiki/Mauchly%27s_sphericity_test (accessed on 12 January 2022).
- Byrne, B.M. Structural Equation Modeling with AMOS: Basic Concepts, Applications, and Programming, 2nd ed.; Routledge: New York, NY, USA, 2010; pp. 102–105. [Google Scholar]
- Schneble, C.O.; Shaw, D.M. Driver’s Views on Driverless Vehicles: Public Perspectives on Defining and Using Autonomous Cars. Transp. Res. Interdiscip. Perspect. 2021, 11, 100446. [Google Scholar] [CrossRef]
- Lokshina, I.; Kniezova, J.; Lanting, C. On Building Users’ Initial Trust in Autonomous Vehicles. Procedia Comput. Sci. 2022, 198, 7–14. [Google Scholar] [CrossRef]
- Merfeld, K.; Wilhelms, M.-P.; Henkel, S. Being Driven Autonomously—A Qualitative Study to Elicit Consumers’ Overarching Motivational Structures. Transp. Res. Part C Emerg. Technol. 2019, 107, 229–247. [Google Scholar] [CrossRef]
- Deb, S.; Strawderman, L.; Carruth, D.W.; DuBien, J.; Smith, B.; Garrison, T.M. Development and Validation of a Questionnaire to Assess Pedestrian Receptivity toward Fully Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Hegner, S.M.; Beldad, A.D.; Brunswick, G.J. In Automatic We Trust: Investigating the Impact of Trust, Control, Personality Characteristics, and Extrinsic and Intrinsic Motivations on the Acceptance of Autonomous Vehicles. Int. J. Hum. Comput. Interact. 2019, 35, 1769–1780. [Google Scholar] [CrossRef]
- Tan, H.; Zhao, X.; Yang, J. Exploring the Influence of Anxiety, Pleasure and Subjective Knowledge on Public Acceptance of Fully Autonomous Vehicles. Comput. Hum. Behav. 2022, 131, 107187. [Google Scholar] [CrossRef]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are We Ready to Ride Autonomous Vehicles? A Pilot Study on Austrian Consumers’ Perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- Hilgarter, K.; Granig, P. Public Perception of Autonomous Vehicles: A Qualitative Study Based on Interviews after Riding an Autonomous Shuttle. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 226–243. [Google Scholar] [CrossRef]
- Schuß, M.; Wintersberger, P.; Riener, A. Security Issues in Shared Automated Mobility Systems: A Feminist HCI Perspective. Multimodal Technol. Interact. 2021, 5, 43. [Google Scholar] [CrossRef]
- Waung, M.; McAuslan, P.; Lakshmanan, S. Trust and Intention to Use Autonomous Vehicles: Manufacturer Focus and Passenger Control. Transp. Res. Part F Traffic Psychol. Behav. 2021, 80, 328–340. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.M. Polite Speech Strategies and Their Impact on Driver’s Trust in Autonomous Vehicles. Comp. Hum. Behav. 2022, 127, 107015. [Google Scholar] [CrossRef]










| Scenario 1: Pick-Up Service, Deliboy | Scenario 2: Public Shuttle, Dovy | |
|---|---|---|
| Vehicle’s Behavior | Approach-Stop-Talk-Wait | |
| Environment | Lawn along sidewalk | A bus stop at the intersection |
| Context | You are waiting for your friend near the pickup station where Deliboy stops. You are not the orderer of the food. | You are at the bus stop to catch a bus. Before your bus arrives, Dovy stops by a nearby Dovy Station. |
| Speech | “Hi! I am Deliboy. I am supposed to meet with the person who ordered pizza here, but they are not here yet. What were you up to?” | “Hello! This is Dovy, a self-driving shuttle bus service. Which bus are you waiting for?” |
| Visual Social Cue | Control | Social Signals | Scenario 1: Pick-Up Service, Deliboy | Scenario 2: Public Shuttle Bus, Dovy |
|---|---|---|---|---|
| Eye Movement | Yes (1) | Vehicle regarded as trying to make eye contact with its eye movement | Eyes blinking and body adjusting to make eye contact with a pedestrian | Eyes blinking and moving to make eye contact with a pedestrian |
| No (0) | Vehicle regarded as not sending recognizable social signals without eye movement | Eyes not blinking and body staying still | Eyes not blinking and without any movement | |
| Conversational Distance | Near (1) | Vehicle actively approaching within the ‘personal zone’ of the pedestrian for conversation | Keeping a distance of 1 m | Keeping a distance of 1 m |
| Far (0) | Vehicle carefully keeping a distance in the ‘boundary of social zones’ for communication | Keeping a distance of 3.5 m | Keeping a distance of 3.5 m to the left |
| Characteristics | Participants (n = 45) |
|---|---|
| Age, median (IQR) | 23 (21; 26) |
| Gender, n (%) | |
| Male | 16 (35.5) |
| Female | 29 (64.5) |
| Country of Residence, n (%) | 45 (100) |
| South Korea |
| Construct | Measurement Items | Sources | |
|---|---|---|---|
| Intimacy (INT) | I became familiar with X | [29,33] | |
| X will affect my choice of the service | |||
| I feel X is emotionally close to me | |||
| I feel like X is my close friend | |||
| I feel familiar with X | |||
| Trust (TRU) | Perceived Reliability | X will always perform tasks consistently | [24] |
| I believe that X will work properly | |||
| X acts trustfully | |||
| Perceived Technical Competence | X will have sufficient knowledge of what X has to do | ||
| X will be able to provide quality services as well as people who provide the same service | |||
| X will use appropriate methods to make judgments | |||
| Brand Attitude (BA) | I am not satisfied with X | [70] | |
| I think X is unpleasant/I think X is pleasant | |||
| I think X is bad/I think X is good | |||
| I do not like X/I like X | |||
| I am negative/positive about X | |||
| I am not in favor of X | |||
| Path | Path Coefficient (1A, 1B) | Path Coefficient (1A–1D) |
|---|---|---|
| TRU → BA | −0.240 * | −0.251 * |
| INT → TRU → BA | - | −0.233 * |
| Concept | Category | Property | Dimension | Aspect | Paradigm |
|---|---|---|---|---|---|
| Crossing the Boundary | Pursuing Contextual Combination | Degree of Pursuit | Active–Passive | Autonomous Vehicle | Casual Condition |
| Starting the Conversation | |||||
| Sharing the Situation | |||||
| Separation of Context | Maintaining the Separation of Context | Degree of Pursuit | High–Low | Pedestrian | |
| Bystander | |||||
| Size | Physical Characteristics | Size | Big–Small | Autonomous Vehicle | Context |
| Mobility | Movement Stability | Stable–Unstable | |||
| Environmental Characteristics | Environmental Characteristics | Degree of Restriction of the Driving Environment | High–Low | Autonomous Vehicle | |
| Conceptual Path | Conceptual Definition of the Space | - | - | Pedestrian-Autonomous Vehicle | Phenomena |
| Perceived Distance | |||||
| Expected Capability | Pre-Expected | Degree of Expectation of its Capability | High–Low | Pedestrian | Intervening Condition |
| Expected Interaction | Expected Interaction Characteristics | Human-Like–Machine-Like | |||
| Trust Level Required by Service | Degree of Trust Required by the Service | High–Low | |||
| Previous Information | Pre-Familiarity | Familiarity | High–Low | Pedestrian | |
| Accumulated intimacy | |||||
| Repeated Experience | |||||
| Spare Time | Spare Time | Spare Time | Relaxed–Urgent | Pedestrian | |
| Personal Metaphor | Empirical Metaphor | - | - | Pedestrian | |
| Familiar Metaphor | |||||
| Task-Oriented Observation | Task-Oriented Evaluation | Judgment Based on Its Task | Task-Oriented Evaluation–Social Interaction-Oriented Evaluation | Pedestrian | Action-Interaction Strategy |
| Importance of Service Context | |||||
| Recognition of Unnecessary Social Skill | |||||
| Feeling like a human | Perception of humanness | Attitude | Positive–Negative | Pedestrian | |
| Recognition of Sociality as Manipulation Function | Perception of Sociality as a Function | Attitude | Positive–Negative | Pedestrian | |
| Recognition of Sociality as Motor Function | |||||
| Recognition of Sociality as Cognitive Function | |||||
| Recognition of Sociality as Judgement Function | |||||
| Recognition of Sociality as a Function of Expressing intimacy | |||||
| Pressure to Respond | Pressure for Interaction | Perceived Level of Pressure | High–Low | Pedestrian | |
| Instant Desire for Interaction | |||||
| Perceived as Equal | Accept/Avoid of Relationships | Relationship Acceptance Attitude | Preference for relationship acceptance–Avoidance for relationship acceptance | Pedestrian | |
| Perception of Relationship | |||||
| Conscious Response | |||||
| Preference in Avoidance | |||||
| Stability | Recognition of Positive Emotion | Perceived Positive Emotion | High–Low | Pedestrian | Consequence |
| Intimacy | |||||
| Trust | |||||
| Unstableness | Recognition of Negative Emotion | Perceived Negative Emotion | High–Low | Pedestrian | |
| Pressure | |||||
| Distance | |||||
| Threat |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.; Kim, S.; Kwak, M.; Park, J.; Park, S.; Kwak, D.; Lee, H.W.; Lee, S. Would You Trust Driverless Service? Formation of Pedestrian’s Trust and Attitude Using Non-Verbal Social Cues. Sensors 2022, 22, 2809. https://doi.org/10.3390/s22072809
Choi S, Kim S, Kwak M, Park J, Park S, Kwak D, Lee HW, Lee S. Would You Trust Driverless Service? Formation of Pedestrian’s Trust and Attitude Using Non-Verbal Social Cues. Sensors. 2022; 22(7):2809. https://doi.org/10.3390/s22072809
Chicago/Turabian StyleChoi, Suji, Soyeon Kim, Mingi Kwak, Jaewan Park, Subin Park, Dongjoon Kwak, Hyun Woo Lee, and Sangwon Lee. 2022. "Would You Trust Driverless Service? Formation of Pedestrian’s Trust and Attitude Using Non-Verbal Social Cues" Sensors 22, no. 7: 2809. https://doi.org/10.3390/s22072809