
Enhance the Accuracy of Landslide Detection in UAV Images Using an Improved Mask R-CNN Model: A Case Study of Sanming, China


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Mask R-CNN Model
Loss Function
2.2. Structure of the Improved Mask R-CNN
2.2.1. Attention Mechanism Added to the Backbone Network ResNet
2.2.2. The Structure of Improved FPN
2.2.3. The Improved RPN
2.3. Flowchart of Landslide Detection
3. Experiments
3.1. Dataset Source
3.2. Dataset Preparation
3.3. Experimental Procedure
3.4. Evaluating Indicator
4. Results
4.1. Extraction Accuracy of the Proposed Improved Mask-R-CNN Model
4.2. Visualization Comparison of Landslide Extraction Results
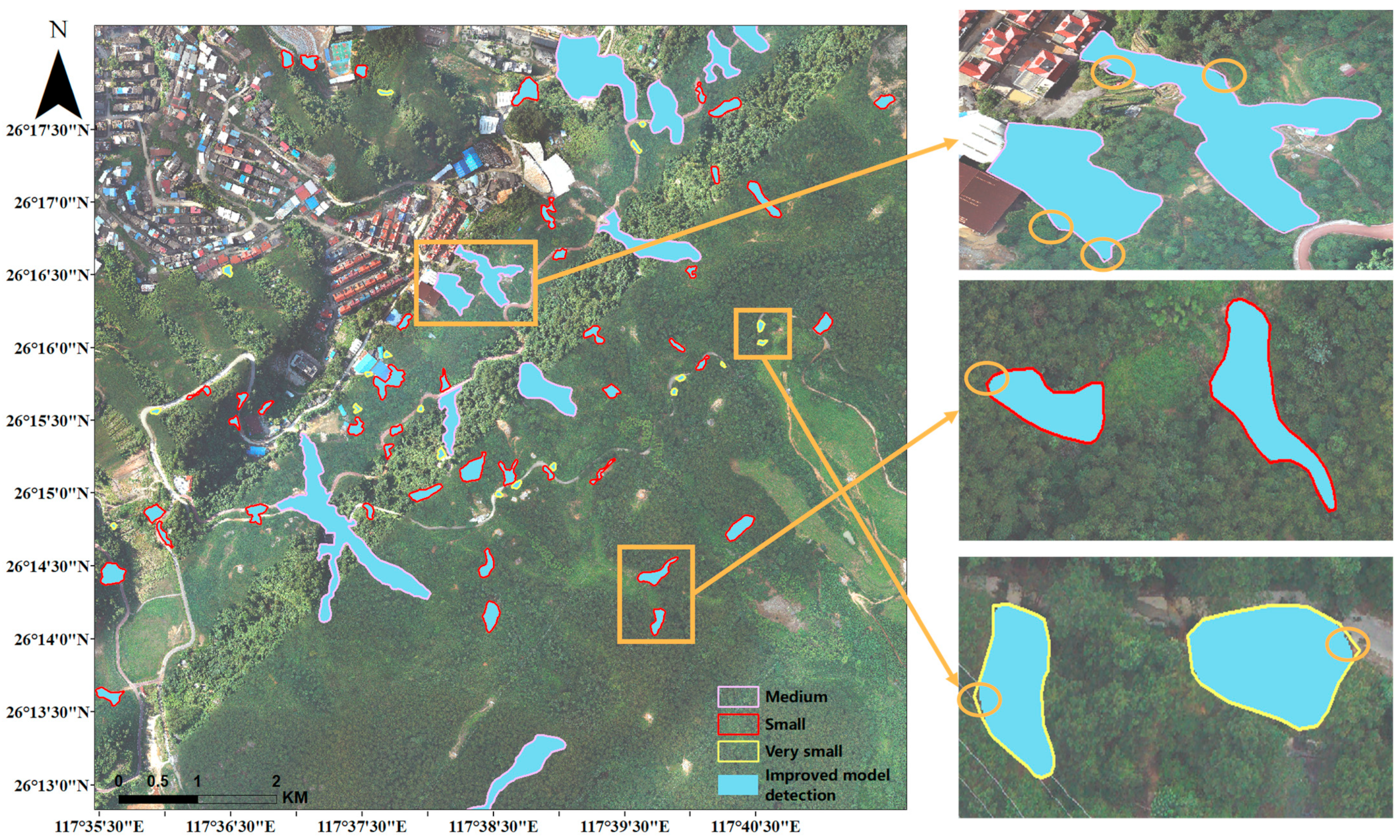
4.3. Landslide Extraction Results for Different Area Scales
5. Discussion
5.1. Comparison of the Training Loss at Different Backbones
5.2. Comparing Effectiveness with Other Detection Models
5.3. Advantages and Disadvantages of the Improved Model for Landsilde Extraction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yin, Y.; Wang, F.; Sun, P. Landslide Hazards Triggered by the 2008 Wenchuan Earthquake, Sichuan, China. Landslides 2009, 6, 139–152. [Google Scholar] [CrossRef]
- Haque, U.; da Silva, P.F.; Devoli, G.; Pilz, J.; Zhao, B.; Khaloua, A.; Wilopo, W.; Andersen, P.; Lu, P.; Lee, J.; et al. The Human Cost of Global Warming: Deadly Landslides and Their Triggers (1995–2014). Sci. Total Environ. 2019, 682, 673–684. [Google Scholar] [CrossRef] [PubMed]
- Ju, Y.; Xu, Q.; Jin, S.; Li, W.; Dong, X.; Guo, Q. Automatic Object Detection of Loess Landslide Based on Deep Learning. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1747–1755. [Google Scholar]
- Zhu, A.X.; Pei, T.; Qiao, J.P.; Chen, Y.; Zhou, C.; Cai, Q. A Landslide Susceptibility Mapping Approach Using Expert Knowledge and Fuzzy Logic Under GIS. Prog. Geogr. 2006, 25, 1–12. [Google Scholar]
- Huang, H.; Song, K.; Yi, W.; Long, J.; Liu, Q.; Zhang, G. Use of Multi-Source Remote Sensing Images to Describe the Sudden Shanshucao Landslide in the Three Gorges Reservoir, China. Bull. Eng. Geol. Env. 2019, 78, 2591–2610. [Google Scholar] [CrossRef]
- Xu, C. Assessment of Earthquake-Triggered Landslide Susceptibility Based on Expert Knowledge and Information Value Methods: A Case Study of the 20 April 2013 Lushan, China Mw6.6 Earthquake. Disaster Adv. 2013, 6, 119–130. [Google Scholar]
- Platt, J. Sequential Minimal Optimization: A Fast Algorithm for Training Support Vector Machines. Adv. Kernel Methods-Support Vector Learn. 1998, 208, 1–21. [Google Scholar]
- Popescu, M.; Balas, V.E.; Perescu-Popescu, L.; Mastorakis, N.E. Multilayer Perceptron and Neural Networks. WSEAS Trans. Circuits Syst. Arch. 2009, 8, 579–588. [Google Scholar]
- Salehinejad, H.; Baarbe, J.; Sankar, S.; Barfett, J.; Colak, E.; Valaee, S. Recent Advances in Recurrent Neural Networks. arXiv 2018, arXiv:1801.01078. [Google Scholar]
- Pal, M. Random Forest Classifier for Remote Sensing Classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Huang, F.; Cao, Z.; Jiang, S.-H.; Zhou, C.; Huang, J.; Guo, Z. Landslide Susceptibility Prediction Based on a Semi-Supervised Multiple-Layer Perceptron Model. Landslides 2020, 17, 2919–2930. [Google Scholar] [CrossRef]
- Zêzere, J.L.; Pereira, S.; Melo, R.; Oliveira, S.C.; Garcia, R.A.C. Mapping Landslide Susceptibility Using Data-Driven Methods. Sci. Total Environ. 2017, 589, 250–267. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, L. Review on Landslide Susceptibility Mapping Using Support Vector Machines. CATENA 2018, 165, 520–529. [Google Scholar] [CrossRef]
- Lin, A.Y.-M.; Novo, A.; Har-Noy, S.; Ricklin, N.D.; Stamatiou, K. Combining GeoEye-1 Satellite Remote Sensing, UAV Aerial Imaging, and Geophysical Surveys in Anomaly Detection Applied to Archaeology. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 870–876. [Google Scholar] [CrossRef]
- Qi, J.; Chen, H.; Chen, F. Extraction of Landslide Features in UAV Remote Sensing Images Based on Machine Vision and Image Enhancement Technology. Neural Comput. Appl. 2022, 34, 12283–12297. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Rostamzadeh, H.; Blaschke, T.; Gholaminia, K.; Aryal, J. A New GIS-Based Data Mining Technique Using an Adaptive Neuro-Fuzzy Inference System (ANFIS) and k-Fold Cross-Validation Approach for Land Subsidence Susceptibility Mapping. Nat. Hazards 2018, 94, 497–517. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Convolutional Neural Networks for Large-Scale Remote-Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 645–657. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in Vegetation Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Qayyum, A.; Malik, A.S.; Saad, N.M.; Iqbal, M.; Faris Abdullah, M.; Rasheed, W.; Rashid Abdullah, T.A.; Bin Jafaar, M.Y. Scene Classification for Aerial Images Based on CNN Using Sparse Coding Technique. Int. J. Remote Sens. 2017, 38, 2662–2685. [Google Scholar] [CrossRef]
- Radovic, M.; Adarkwa, O.; Wang, Q. Object Recognition in Aerial Images Using Convolutional Neural Networks. J. Imaging 2017, 3, 21. [Google Scholar] [CrossRef]
- Mahmoud, A.S.; Mohamed, S.S.; El-Khoribi, R.A.; Abdelsalam, H.M.E. Object Detection Using Adaptive Mask RCNN in Optical Remote Sensing Images. Int. J. Intell. Eng. Syst. 2020, 13, 65–76. [Google Scholar] [CrossRef]
- Bui, T.-A.; Lee, P.-J.; Lum, K.-Y.; Chen, C.-R.; Shiu, S.H. Using BEMD in CNN to Identify Landslide in Satellite Image. In Proceedings of the 2019 International Conference on System Science and Engineering (ICSSE), Dong Hoi, Vietnam, 20–21 July 2019; pp. 94–97. [Google Scholar]
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide Detection from an Open Satellite Imagery and Digital Elevation Model Dataset Using Attention Boosted Convolutional Neural Networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Shahabi, H.; Crivellari, A.; Homayouni, S.; Blaschke, T.; Ghamisi, P. Landslide Detection Using Deep Learning and Object-Based Image Analysis. Landslides 2022, 19, 929–939. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, C.; Li, L. Landslide Detection Based on ResU-Net with Transformer and CBAM Embedded: Two Examples with Geologically Different Environments. Remote Sens. 2022, 14, 2885. [Google Scholar] [CrossRef]
- Cheng, L.; Li, J.; Duan, P.; Wang, M. A Small Attentional YOLO Model for Landslide Detection from Satellite Remote Sensing Images. Landslides 2021, 18, 2751–2765. [Google Scholar] [CrossRef]
- Romero, A.; Gatta, C.; Camps-Valls, G. Unsupervised Deep Feature Extraction for Remote Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1349–1362. [Google Scholar] [CrossRef]
- Längkvist, M.; Kiselev, A.; Alirezaie, M.; Loutfi, A. Classification and Segmentation of Satellite Orthoimagery Using Convolutional Neural Networks. Remote Sens. 2016, 8, 329. [Google Scholar] [CrossRef]
- Su, H.; Wei, S.; Yan, M.; Wang, C.; Shi, J.; Zhang, X. Object Detection and Instance Segmentation in Remote Sensing Imagery Based on Precise Mask R-CNN. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1454–1457. [Google Scholar]
- Sui, H.; Huang, L.; Liu, C. Detecting Building Façade Damage Caused by Earthquake Using CBAM-Improved Mask R-CNN. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1660–1668. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, J.; Lei, D. Research on Landslide Detection Based on Depth Learning Algorithm. Inf. Commun. 2019, 193, 16–18. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. arXiv 2016. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector; Springer: Cham, Switerland, 2016; Volume 9905, pp. 21–37. [Google Scholar]
- Liu, P.; Wei, Y.; Wang, Q.; Xie, J.; Chen, Y.; Li, Z.; Zhou, H. A Research on Landslides Automatic Extraction Model Based on the Improved Mask R-CNN. ISPRS Int. J. Geo-Inf. 2021, 10, 168. [Google Scholar] [CrossRef]
- Jiang, W.; Xi, J.; Li, Z.; Ding, M.; Yang, L.; Xie, D. Landslide Detection and Segmentation Using Mask R-CNN with Simulated Hard Samples. Geomat. Inf. Sci. Wuhan Univ. 2021, 1–18. [Google Scholar] [CrossRef]
- Fu, R.; He, J.; Liu, G.; Li, W.; Mao, J.; He, M.; Lin, Y. Fast Seismic Landslide Detection Based on Improved Mask R-CNN. Remote Sens. 2022, 14, 3928. [Google Scholar] [CrossRef]
- Kubo, S.; Yamane, T.; Chun, P. Study on Accuracy Improvement of Slope Failure Region Detection Using Mask R-CNN with Augmentation Method. Sensors 2022, 22, 6412. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yao, X.; Gu, Z.; Zhou, Z.; Liu, X.; Chen, X.; Wei, S. Study of the Automatic Recognition of Landslides by Using InSAR Images and the Improved Mask R-CNN Model in the Eastern Tibet Plateau. Remote Sens. 2022, 14, 3362. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R.B. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 386–397. [Google Scholar] [CrossRef] [PubMed]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 26–29 June 2015; pp. 3431–3440. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–29 June 2016; pp. 770–778. [Google Scholar]
- Lin, T.-Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 26–29 July 2017; pp. 936–944. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Computer Vision–ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11211, pp. 3–19. ISBN 978-3-030-01233-5. [Google Scholar]
- Wang, J.; Chen, K.; Yang, S.; Loy, C.C.; Lin, D. Region Proposal by Guided Anchoring. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 2960–2969. [Google Scholar]
- Varnes, D.J. Slope Movement Types and Processes. Transp. Res. Board. Spec. Rep. 1978, 176, 11–33. [Google Scholar]
- Cruden, D.; Cruden, D.M.; Varnes, D.J. Landslide Types and Processes, Special Report, Transportation Research Board, National Academy of Sciences, 247:36-75. Spec. Rep. -Natl. Res. Counc. Transp. Res. Board 1996, 247, 76. [Google Scholar]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open MMLab Detection Toolbox and Benchmark. arXiv 2019, arXiv:1906.0715. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollar, P.; Zitnick, L. Microsoft COCO: Common Objects in Context. In Computer Vision—ECCV 2014. ECCV 2014. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Garcia-Garcia, A.; Orts, S.; Oprea, S.; Villena Martinez, V.; Rodríguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- Amankwah, S.O.Y.; Wang, G.; Gnyawali, K.; Hagan, D.F.T.; Sarfo, I.; Zhen, D.; Nooni, I.K.; Ullah, W.; Duan, Z. Landslide Detection from Bitemporal Satellite Imagery Using Attention-Based Deep Neural Networks. Landslides 2022, 19, 2459–2471. [Google Scholar] [CrossRef]
- Amatya, P.; Kirschbaum, D.; Stanley, T.; Tanyas, H. Landslide Mapping Using Object-Based Image Analysis and Open Source Tools. Eng. Geol. 2021, 282, 106000. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hawaii, HI, USA, 21–26 July 2017. [Google Scholar]
- Yang, Q.-L.Z.Y.-B. SA-Net: Shuffle Attention for Deep Convolutional Neural Networks. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021. [Google Scholar]
- Nagendra, S.; Kifer, D.; Mirus, B.; Pei, T.; Lawson, K.; Manjunatha, S.B.; Li, W.; Nguyen, H.; Qiu, T.; Tran, S.; et al. Constructing a Large-Scale Landslide Database Across Heterogeneous Environments Using Task-Specific Model Update. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4349–4370. [Google Scholar] [CrossRef]
- Yu, B.; Chen, F.; Xu, C. Landslide Detection Based on Contour-Based Deep Learning Framework in Case of National Scale of Nepal in 2015. Comput. Geosci. 2020, 135, 104388. [Google Scholar] [CrossRef]
- Al-Zuhairi, M.; Pradhan, B. Landslide Detection Using Residual Networks and the Fusion of Spectral and Topographic Information. IEEE Access 2019, 7, 114363–114373. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Parameters | Value |
|---|---|
| Resolution | 0.1 m |
| Row | 85,406 |
| Column | 84,370 |
| Number of Bands | 3 (Red, Green, Blue) |
| Descriptor | Number | |
|---|---|---|
| Very small | <200 | 61 |
| Small | 200–2000 | 136 |
| Medium | 2000–20,000 | 44 |
| Large | 20,000–200,000 | 0 |
| Very large | 200,000–2,000,000 | 0 |
| Huge | >2,000,000 | 0 |
| Model | Precision/% | Recall/% | Accuracy/% | F1/% | MIoU/% |
|---|---|---|---|---|---|
| Original Mask R-CNN | 86.9 | 78.5 | 81.7 | 82.5 | 70.2 |
| ResNet+CBAM+Mask R-CNN | 87.1 | 80.5 | 83.1 | 83.7 | 71.9 |
| GA-RPN+Mask R-CNN | 89.3 | 84.6 | 86.6 | 86.9 | 76.8 |
| Improved FPN+Mask R-CNN | 90.6 | 87 | 88.6 | 88.7 | 79.8 |
| Our Improved Mask R-CNN | 93.9 | 91.4 | 92.6 | 92.6 | 86.4 |
| Model Detection Speed | |
|---|---|
| Improved Mask R-CNN | 0.2493 s/iteration |
| Original Mask R-CNN | 0.1660 s/iteration |
| Descriptor | Actual Area/m2 | Improved Mask R-CNN Detection Area/m2 | Detection Accuracy |
|---|---|---|---|
| Total | 316,738.58 | 297,308.18 | 93.87% |
| Very small | 6379.94 | 5972.71 | 93.62% |
| Small | 88,775.84 | 85,485.81 | 96.29% |
| Medium | 221,582.79 | 205,849.66 | 92.90% |
| Model | Precision/% | Recall/% | Accuracy/% | F1/% | MIoU/% |
|---|---|---|---|---|---|
| Faster R-CNN | 77.8 | 71 | 77.3 | 74.4 | 59.1 |
| SSD | 72.7 | 67.5 | 69 | 70 | 53.9 |
| Mask R-CNN | 86.9 | 78.5 | 81.7 | 82.5 | 70.2 |
| Our Improved Mask R-CNN | 93.9 | 91.4 | 92.6 | 92.6 | 86.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, L.; Zhang, X.; Zheng, Y.; Wang, D.; Hua, L. Enhance the Accuracy of Landslide Detection in UAV Images Using an Improved Mask R-CNN Model: A Case Study of Sanming, China. Sensors 2023, 23, 4287. https://doi.org/10.3390/s23094287
Yun L, Zhang X, Zheng Y, Wang D, Hua L. Enhance the Accuracy of Landslide Detection in UAV Images Using an Improved Mask R-CNN Model: A Case Study of Sanming, China. Sensors. 2023; 23(9):4287. https://doi.org/10.3390/s23094287
Chicago/Turabian StyleYun, Lu, Xinxin Zhang, Yuchao Zheng, Dahan Wang, and Lizhong Hua. 2023. "Enhance the Accuracy of Landslide Detection in UAV Images Using an Improved Mask R-CNN Model: A Case Study of Sanming, China" Sensors 23, no. 9: 4287. https://doi.org/10.3390/s23094287