1. Introduction
In order to meet safety and environmental regulations, it is vital to ensure the reliability of operating gas and oil pipelines. The failure of a large number of pipelines in several countries in recent years has led to big losses in human lives, destruction of residential and industrial buildings, and has caused complicated environmental hazards [
1]. These disasters have resulted in increasing research activities dealing with the issues related to the failure prevention of pipelines.
Thodi et al. [
2] pointed out that hydrocarbon leakage constitutes a serious impact on the safety of chemical equipment operations. Studies have shown that corrosion is the main cause of approximately 15% of leaks in chemical plants and accounts for 21% of gas pipelines failures. Corrosion patterns also account for 24.6% of pipeline leaks in processing plants. In addition, 40% of accidental hydrocarbon releases into the environment are related to corrosion. Papavinasam et al. [
3] studied weight loss, linear polarization resistance (LPR), electrochemical impedance spectroscopy (EIS), the reliability of electrochemical noise (EN), and the performance of inhibitors used to monitor oil and gas pipelines using external hydrogen probes. Sinha [
4] developed an ultrasonic sensing method for monitoring natural gas pipelines. He demonstrated how to use this technique to monitor various types of defects in pipelines and use a transducer in the pipeline to detect defects on the outside of the pipeline (for example, in a 0.5 mm groove on a 7 mm thick tube). Jawhar et al. [
5] focused on the use of wireless sensor networks in petroleum pipelines and also for monitoring and protection of natural gas and water pipelines. Their proposed sensor network demonstrated that it could reduce installation and maintenance costs, reduce energy consumption, and increase the reliability and efficiency of pipeline operations. Ceravolo et al. [
6] used the spectral entropies method for damage detection and localization of single and multiple points of damage in a buried steel pipeline by measuring the strain. They demonstrated that the wiener entropy or spectral flatness method is emerging as an efficient method for damage assessment.
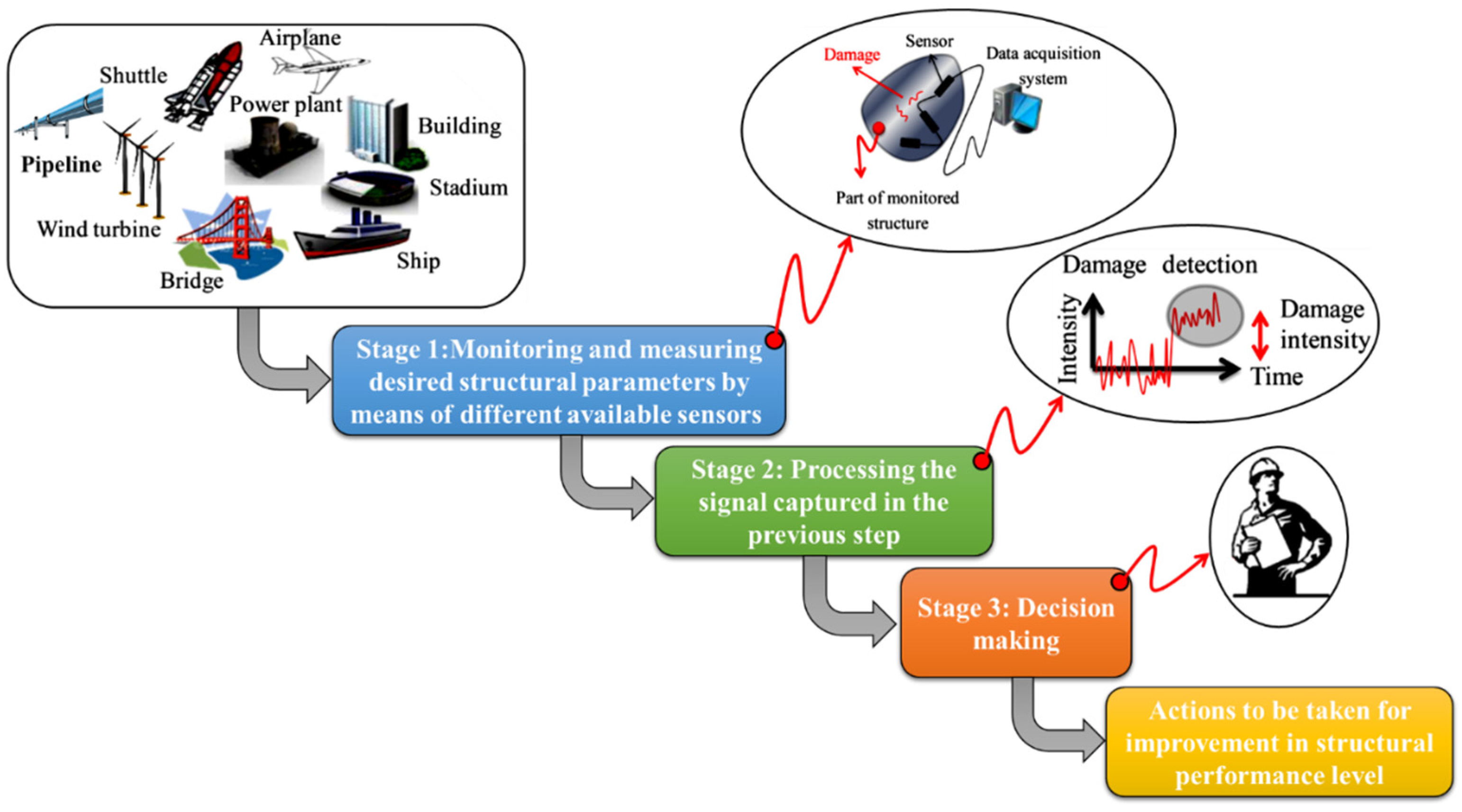
It is critically important to provide effective and suitable SHM systems for structures, especially dangerous structures that would cause catastrophic loss of life if their failure occurred suddenly without warning. The main use of SHM systems is to diagnose the health and safety of structures over time through the collection of structural health datasets from sensors installed in the structure and analysis using assistant algorithms to predict the remaining life of the structure. Therefore, catastrophic accidents can be prevented before they happen by detecting the different stages of the damage over time prior to a potential failure [
7,
8,
9,
10]
Several studies have been reported on SHM methods for pipelines. Morison [
11] introduced an SHM scheme for detecting internal corrosion in pipelines. Park et al. [
12] proposed an SHM-based impedance method using piezoelectric materials to monitor damage in pipelines. They used a high-frequency excitation method to monitor the local structure area to detect the change in structural impedance associated with impending damage. Stoianov et al. [
13] improved the SHM system proposed by Jawhar by increasing the spatial and temporal resolution for wireless sensor networks (WSN) based on real-time data monitoring. They demonstrated that WSNs could monitor large-diameter and large-scale water pipelines. Thien et al. [
14] discussed the benefits and feasibility of applying an SHM system that relies on the deployment of macro-fiber composite (MFC) transducers for sensor arrays. Since the MFC patch is flexible, it can be permanently installed on the curved surface of the pipe body. To identify and locate damage in a pipeline, they studied Lamb wave-based MFC sensors to detect cracks and corrosion. Jin and Eydgahi [
15] described a monitoring system for pipelines via a platform of sensor networks. They implemented their technique in pipeline systems for the distribution and transportation of oil, natural gas, water, and sewage. They discussed how their sensor network could detect, locate and quantify bursts, leaks, and other abnormalities in a pipeline system. Peairs et al. [
16] utilized sensor nodes to monitor oil pipelines and studied the linear sensor placement problem to maximize their lifetime. Tapanes [
17] presented current research on the impedance-based SHM technique at the Center for Intelligent Material Systems and Structures. They applied high-frequency excitations as the basic principle in their technique by using piezoelectric transducers to measure the structure’s impedance through the current and voltage monitoring. They found that the impedance methods have drawbacks and that methods based on this approach are expensive and not practical. Park and Inman [
18] introduced a variety of SHM systems to monitor the integrity of pipelines while in operation and proved their approach could prevent catastrophic failures and reduce the costs of maintenance and inspection tasks.
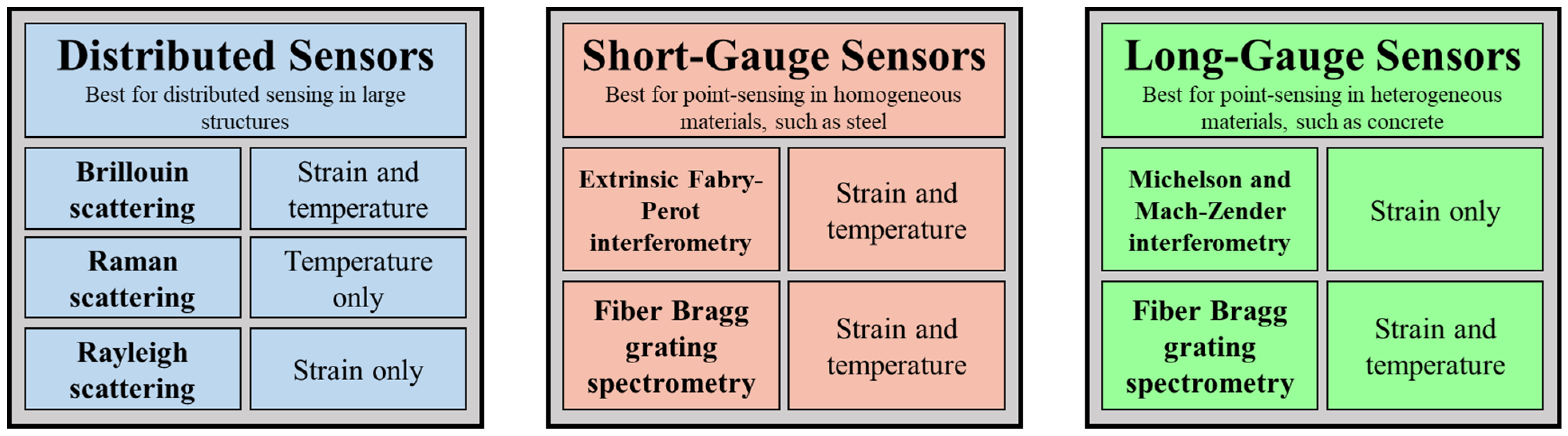
Once Fiber-Optic (FO) Sensors appeared in the mid-1970s, they became highly valued by relevant research departments in various countries. The United States is the country with the earliest and the highest level of research on FO sensors, and its progress in military and civilian applications is very rapid. In terms of military applications, their research and development mainly concentrates on using FO sensors for underwater detection, FO sensors for aviation monitoring, FO gyroscopes, and FO sensors for nuclear radiation detection. In the mechanical and civil engineering fields, FO sensors are mainly used to monitor important parameters such as current, voltage, and temperature of the power system, and to monitor stress changes in bridges, pipelines, and also important buildings.
Numerous studies have been carried out on pipelines using FO sensors to estimate the effects of pipeline damage using both experiments and numerical prediction methods. Nikles and Briffod [
19] introduced a technique to address the impact of blockages in hydrocarbon pipelines using a Fiber Bragg grating (FBG) sensing system which provides distributed sensing capabilities. Their proposed approach provided results that simulate the effect of pipeline blockage, which proved the validity of their introduced technique. Inaudi and Glisic [
20] reported many important field application examples of fiber-optic (FO) sensing with the ability to measure temperature and strain at thousands of points with a single FO. Their approach demonstrated important applications for monitoring slender pipelines installed in oil wells and coiled tubing. Their approach could detect pipeline leaks and prevent the failure of pipelines installed in refineries and could also be used for detecting hot spots in high-power cables. Meinert et al. [
21] proposed a method for detecting and preventing serious damage to pipelines mainly caused by interference from several noise sources. They showed their permanent monitoring semi-intelligent system could reduce the need for online inspection. Yan and Chyan [
22] discussed the theoretical and numerical studies related to suppressing unfavorable FO nonlinearity and Stimulated Brillouin Scattering (SBS) using a statistical approach.
To develop a non-slippage FO, the bonding and point fixation methods were investigated experimentally and the critical effective sensing length for long-gauge fiber was studied [
23]. A combination between an artificial neural network and a distributed FO vibration sensing (DOFVS) system based on long-distance fiber has been used to collect the responses in the vibration signal of soil around a pipeline [
24,
25,
26,
27]. In addition, the technology of the DOFVS system based on a phase-sensitive optical time-domain reflectometer (OTDR) was used to develop a water pipeline hydrostatic leak test [
28] and fatigue damage identification for composite pipelines systems using electrical capacitance sensors [
29].
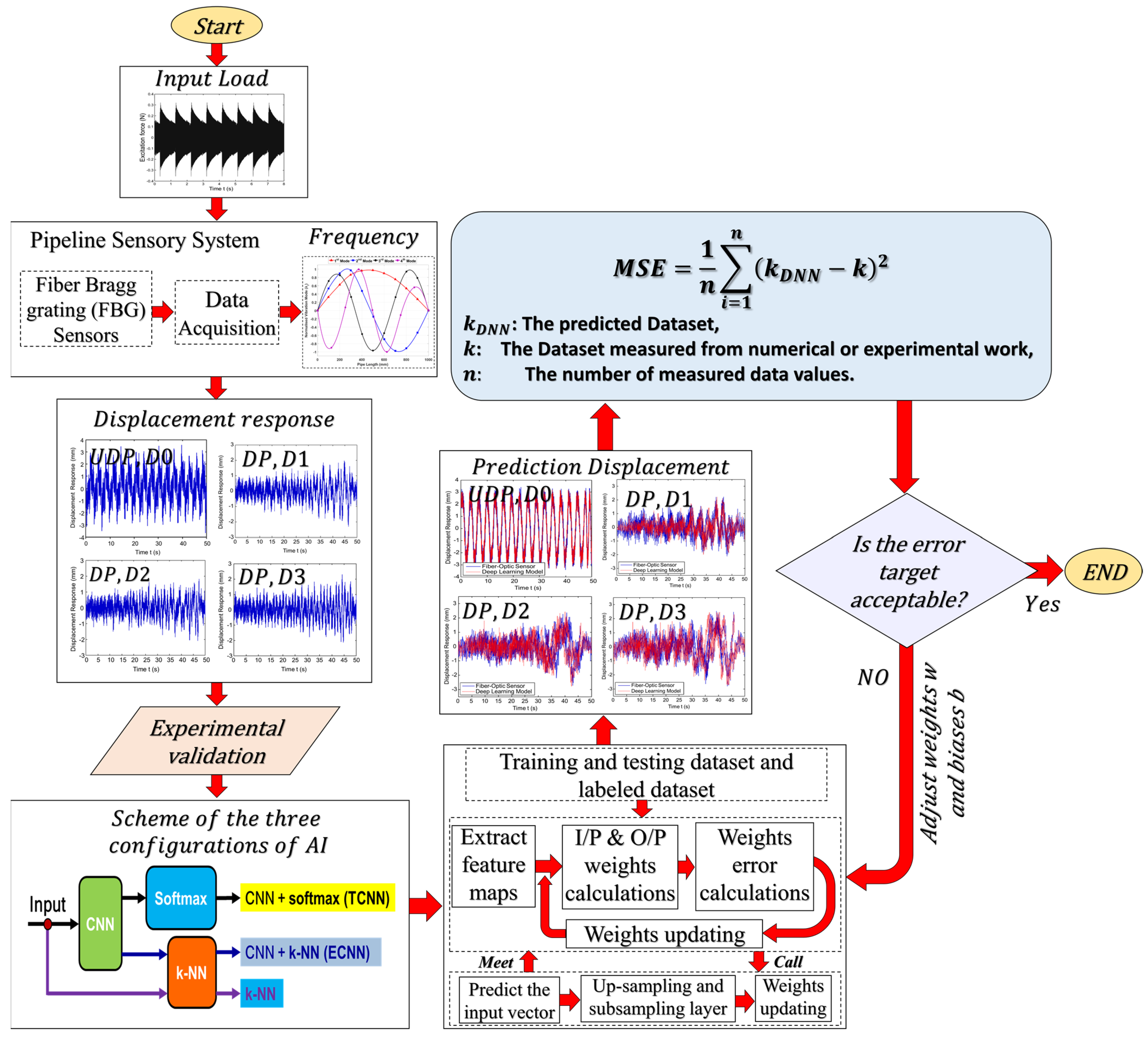
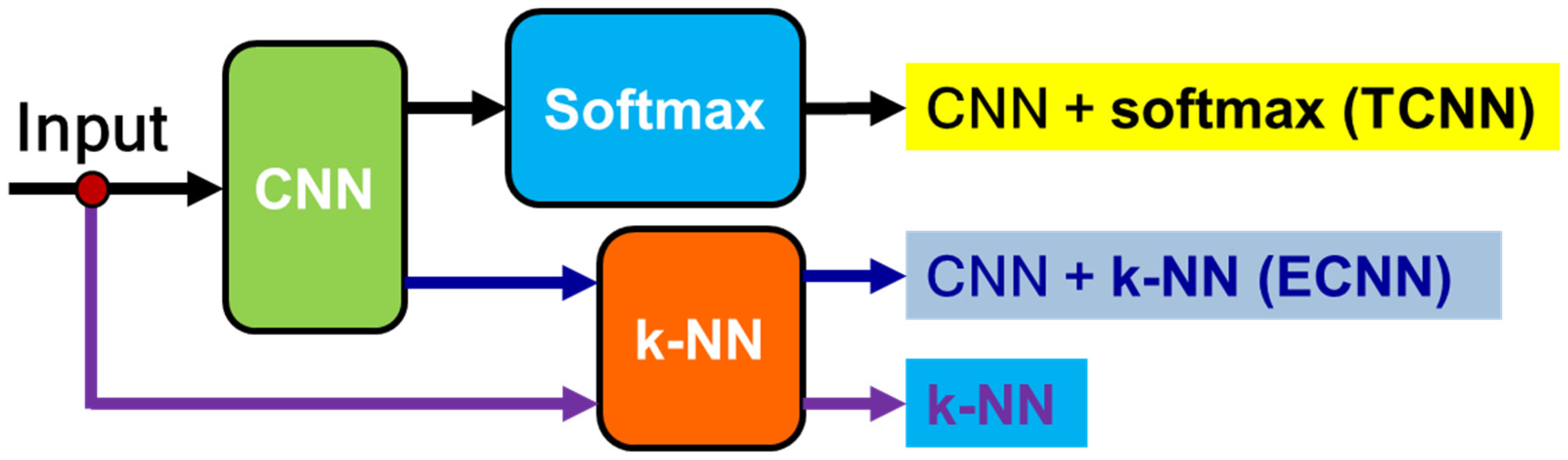
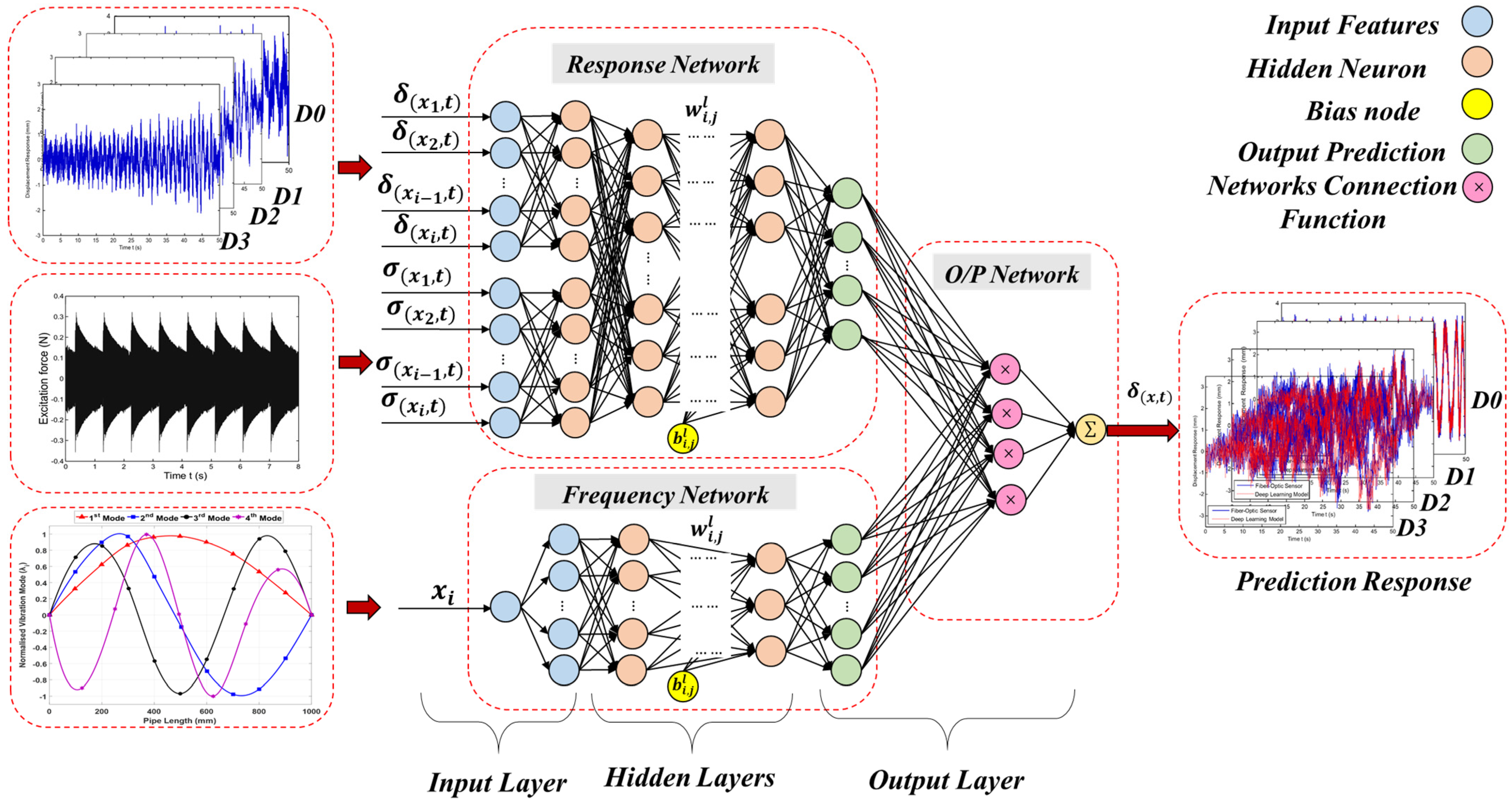
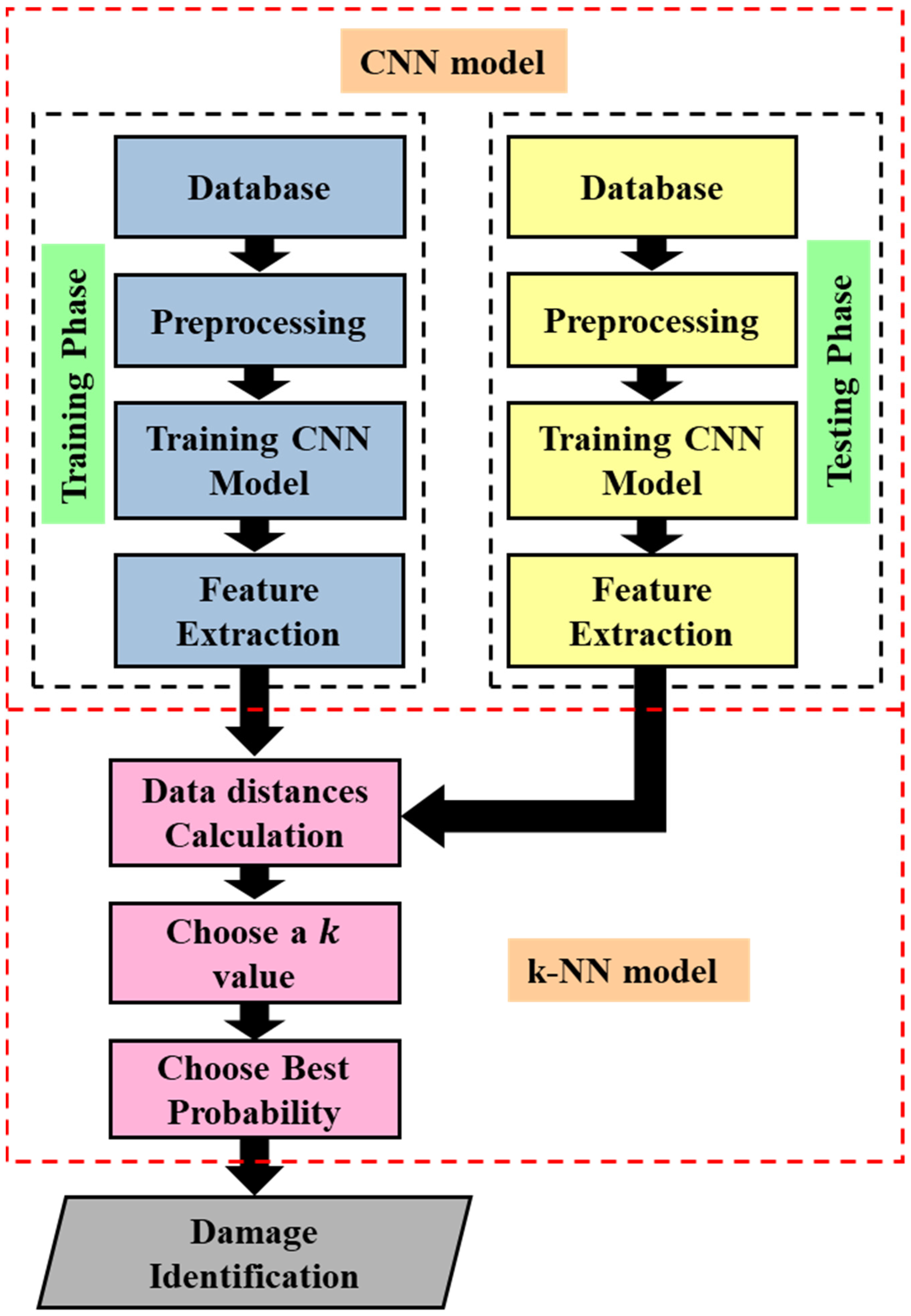
According to the background of the literature presented, most of the conventional non-destructive testing (NDT) techniques are not applicable for current research work. It has been shown that the conventional methods do not provide the necessary information about either the current or future performance of composite pipelines systems and are not suitable for either new or old composite pipelines systems. In this case, FO sensors could be an effective alternative. In this study, a novel monitoring approach is developed to detect damage at an early stage in composite pipelines. The proposed approach relies on designing an integrated sensing-diagnostic SHM system with the capability to detect damage in composite pipelines at an early stage. This is achieved by implementing an artificial intelligence (AI)-based algorithm combining deep learning and other efficient machine learning methods using an Enhanced Convolutional Neural Network (ECNN) without retraining the model. The ultimate goal of the research is to provide pipeline operators with a continuous, real-time, active warning system for the detection of damages in composite pipelines using distributed strain sensors.



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}