
Machine Learning Assists IoT Localization: A Review of Current Challenges and Future Trends

Abstract
:1. Introduction
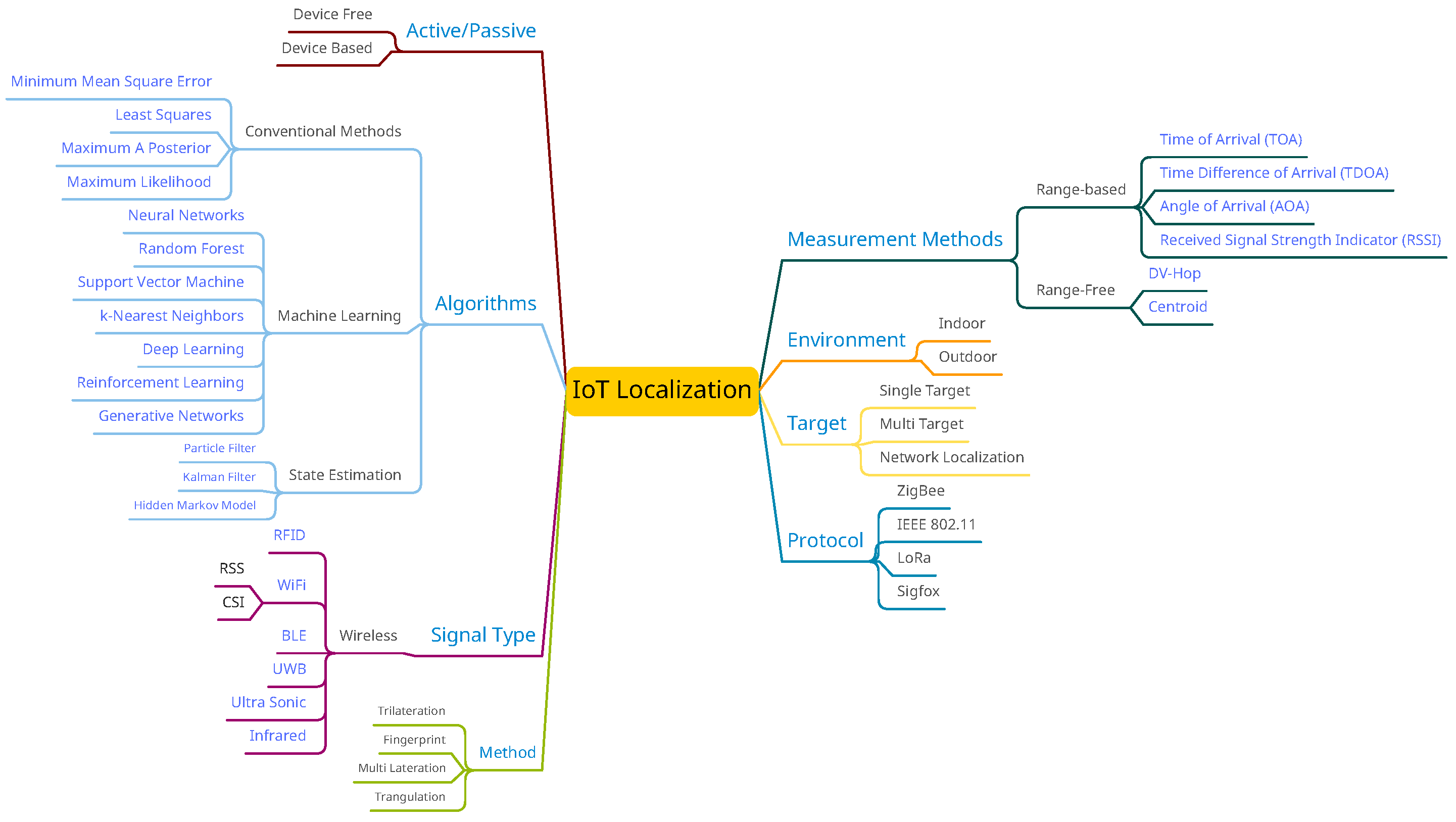
- The received signal strength (RSS) is a measurement of the strength of a wireless signal at a specific location. It is commonly used in IoT localization systems to determine the distance between a device and a reference point, such as a WiFi router or cell tower. By measuring the RSS at multiple reference points, the device’s location can be triangulated. The RSS is typically expressed in decibels relative to one milliwatt. It is a measurement of the strength of a wireless signal at a specific location that can be used to determine the distance between the device and the reference point. The stronger the signal, the shorter the distance. The relationship between the RSS and distance, on the other hand, is not always straightforward, as it can be influenced by a variety of factors such as the presence of obstacles, interference from other signals, and antenna characteristics [10,11].
- The channel state information (CSI) is a measure of the characteristics of a wireless signal, such as its phase and amplitude at different frequencies. It is frequently used in WiFi localization systems to improve the accuracy of location estimates. The CSI can be used to collect data about the environment in which the signal is being transmitted, such as the presence of reflections or specific objects. The CSI is typically expressed in complex numbers that represent the phase and amplitude of the signal at each frequency. The distance between the device and the reference point, the presence of obstacles or other sources of interference, and the antenna characteristics of the device can all influence the signal’s phase and amplitude [12].
- Bluetooth Low Energy (BLE) is a wireless communication technology popular in IoT devices. Because of its low power consumption and short range, it is well-suited for use in location-based services. BLE can be used in both range-based and range-free localization systems, depending on how it is implemented [13].
- Other radiofrequency techniques used in IoT localization include radiofrequency identification (RFID) and ultrawideband (UWB). RFID employs passive tags that are attached to objects and read by a reader, whereas UWB employs radio pulses that are extremely brief in duration and can be used for high-precision localization [14].
- k-Nearest neighbors (KNN): A simple but effective machine learning algorithm that can be used for both classification and regression. In the context of IoT localization, KNN could be used to predict the location of an IoT device based on the locations of other nearby devices.
- Decision trees: A machine learning algorithm that produces a treelike model of decisions and their potential outcomes. It can forecast an IoT device’s location based on the values of various features, such as the wireless signal strength or the presence of specific landmarks.
- Support vector machine (SVM): SVMs are powerful machine learning algorithms that can be used for classification, regression, and a variety of other tasks. In the context of IoT localization, SVMs could be used to predict the location of an IoT device based on patterns in data collected from it.
- Neural networks are a type of machine learning algorithm that is inspired by the structure and function of the human brain. Neural networks can perform a variety of tasks, including classification, regression, and pattern recognition. In the context of IoT localization, neural networks could be used to predict the location of an IoT device based on patterns in data collected from it.
- Deep learning (DL): DL is a type of machine learning that makes use of deep neural networks with multiple layers of processing. It is capable of detecting complex patterns in data and predicting outcomes based on those patterns. In the context of IoT localization, deep learning could be used to predict the location of an IoT device based on patterns in data collected from it. Deep learning is a subset of machine learning that makes use of deep neural networks with multiple processing layers. Deep learning can be used in IoT localization to analyze data from various sources, such as GPS, wireless communication signals, and sensor data, in order to improve the accuracy and reliability of location estimates. The ability of deep learning to handle large and complex datasets is a significant advantage for IoT localization. Deep learning algorithms can learn to see patterns and relationships in data that humans cannot, allowing them to make more accurate predictions. Deep learning algorithms can also learn and improve their performance as they are exposed to more data.
- Reinforcement learning is a subset of machine learning in which an agent learns how to interact with its surroundings in order to maximize a reward signal. Reinforcement learning could be used in the context of IoT localization to optimize the behavior of an IoT device in order to improve the accuracy of its location estimates.
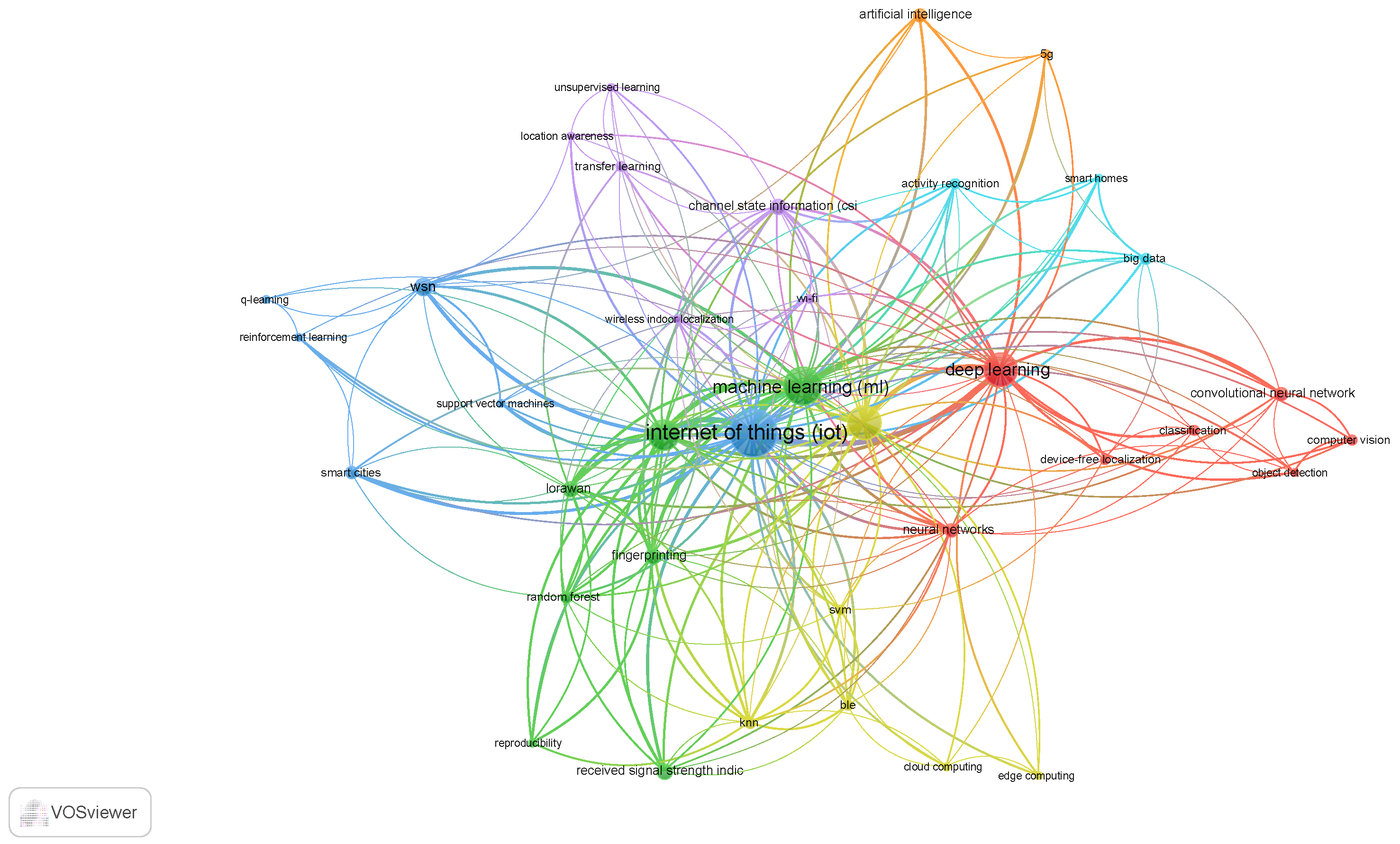
1.1. Our Methodology
1.2. Existing Surveys
1.3. Contributions
- By focusing on machine learning algorithms for IoT localization, we fill a gap in existing surveys. We cover publications released between 2020 and 2022.
- We categorize the current literature based on measurement techniques, specific IoT protocols, whether they are range-based or range-free, and the machine learning algorithm that they use.
- We examine the current and potential applications of machine-learning-based IoT localization.
- We discuss the challenges and future trends of machine-learning-based IoT localization.
2. Literature Review

{kind=link}
{kind=link}
{kind=link}
| No. | Ref. | Publication Year | Range-Based or Range-Free | Indoor or Outdoor | Measurement Tech. | Machine Learning Tech. | IoT Tech. | Description |
|---|---|---|---|---|---|---|---|---|
| 1 | [26] | 2020 | Range-based | Outdoor | RSS | Linear regression SVM, KNN, random forest | LoRaWAN | Benchmark for measurements |
| 2 | [28] | 2020 | Range-based | Indoor | RSS | ANN, Levenberg–Marquardt, Bayesian regularization, backpropagation | - | |
| 3 | [29] | 2020 | - | - | - | CNN | NB-IoT, LoRa, RFID, SigFox, ZigBee | Middleware-free platform for IoT tracking |
| 4 | [30] | 2020 | Range-based | Indoor | RSS | SVM, KNN, random forest | - | Outlier detection |
| 5 | [31] | 2020 | Range-based | Indoor | RSS | Deep learning CNN | ZigBee | - |
| 6 | [32] | 2020 | Range-based | Indoor | RSS | Deep neural networks | ZigBee | Single-target localization |
| 7 | [33] | 2020 | Range-based | - | - | Multidimensional scaling (MDS) | - | Outlier detection for non-line-of-sight localization |
| 8 | [34] | 2020 | Range-based | Indoor | RSS | Deep learning | 5G | 3D Localization |
| 9 | [35] | 2020 | Range-based | Indoor | RSS | ANN, KNN | BLE | Fingerprint localization |
| 10 | [36] | 2021 | - | Outdoor | DoA | Unsupervised NC-MUSIC | - | Vehicular network |
| 11 | [37] | 2021 | Range-based | Indoor | RSS | Extreme learning, fuzzy, swarm intelligence | - | Hybrid tracking algorithm |
| 12 | [38] | 2021 | Range-based | Indoor | RSS | Deep reinforcement learning (Q-learning) | - | Markov decision process |
| 13 | [39] | 2021 | Range-based | Indoor | RSS | Deep neural network | - | Fingerprint localization |
| 14 | [40] | 2021 | Range-based | Outdoor | RSS | Semisupervised transfer learning | LoRaWAN | RSS besides signal-to-noise ratio and timestamps |
| 15 | [41] | 2021 | Range-based | - | - | Deep learning | - | Low-rank matrix formation |
| 16 | [42] | 2021 | Range-based | Indoor | RSS | Random forest | - | Smart building |
| 17 | [43] | 2021 | Range-based | Indoor | RSS | Random forest, ANN, decision tree, SVM, KNN, deep learning, linear regression | BLE | - |
| 18 | [44] | 2021 | Range-based | Indoor | RSS | Deep learning | - | Fingerprint localization |
| 19 | [45] | 2021 | Range-based | Indoor | RSS | Random forest, KNN, SVM, decision tree | BLE | Fingerprint localization |
| 20 | [46] | 2021 | Range-based | Outdoor | RSS | Deep learning | 6G | UAVs |
| 21 | [47] | 2021 | Range-based | Indoor | CSI | Autoencoder | - | Millimeter- wave |
| 22 | [48] | 2021 | Range-based | Outdoor | RSS | Random forest, multilayer perceptron | LoRa | Using signal strength difference |
| 23 | [49] | 2022 | Range-based | Indoor | CSI | Swarm intelligence, extended Kalman filter | - | Big data, Smart Cities |
| 24 | [50] | 2022 | - | Outdoor | - | Reinforcement learning (Q-learning) | - | Grid Network |
| 25 | [51] | 2022 | Range-free | - | Hopping | Ridge-regression extreme learning | - | - |
| 26 | [52] | 2022 | Range-based | Outdoor | RSS | Deep learning | LPWAN | Fingerprint localization |
| 27 | [53] | 2022 | Range-based | Indoor | RSS | Genetic fuzzy systems | BLE | - |
| 28 | [54] | 2022 | Range-based | Outdoor | RSS | Support vector regression, gaussian process regression | LoRaWAN | Fingerprint localization |
| 29 | [56] | 2022 | Range-based | Indoor | RSS/CSI | Clustering using Fidora | - | Transfer learning method |
| 30 | [57] | 2022 | Range-based | Indoor | RSS | LSTM | BLE, UWB | Tracking |
| 31 | [58] | 2022 | - | Indoor | Sound | Deep neural network, CNN | - | - |
| 32 | [59] | 2022 | - | Indoor | PIR | CNN-LSTM | - | Using analog signals |
| 33 | [60] | 2022 | Range-based | Outdoor | - | Crowd density, deep learning, time-independent visiting trip, CNN | - | - |
| 34 | [61] | 2022 | Range-based | Indoor | RSS | Multiagent reinforcement learning | - | Distributed localization |
| 35 | [62] | 2022 | Range-free | - | Hopping | Autoencoders | - | - |
3. Applications of Learning in IoT Localization
- Calibration: Learning algorithms can be used to calibrate sensors and other IoT device components, ensuring that they function correctly and provide accurate data. This can help to improve the overall accuracy of the location estimates [76].
- Noise reduction: Machine learning algorithms can be used to remove noise and other sources of error from data from IoT devices. This can aid in improving the accuracy of location estimates by reducing the impact of errors and other factors that can distort the data. Machine learning algorithms can be used to identify the most relevant features in data collected from IoT devices, thereby improving location estimation accuracy by focusing on the most important factors [18].
- Model selection: machine learning algorithms can be used to identify the best model or combination of models for a given application, improving location estimation accuracy by selecting the best model that fits the data.
- Improving accuracy: large quantities of data can be analyzed by machine learning algorithms to provide more accurate estimates of device location.
- Automating the localization process: machine learning has the potential to automate the process of determining device location, removing the need for manual input.
- Adapting to changes in the environment: to provide more accurate location estimates, machine learning algorithms can adapt to changes in the environment, such as new obstacles or changes in signal strength.
4. Challenges of Learning-Based IoT Localization
- Data quality: The quality of data collected from IoT devices heavily influences the accuracy and dependability of location estimates. If the data are noisy, incomplete, or corrupted, the learning algorithms may struggle to locate the devices accurately.
- Computational complexity: Deep learning algorithms, for example, can require significant computational resources to train and deploy. Because IoT devices may have limited processing power and storage capacity, this can be difficult.
- Limited data: In some cases, the data collected by IoT devices may be limited in quantity or quality, making it difficult to train accurate learning models. This is especially challenging in applications where devices are deployed in unusual or rare environments, or where data are highly variable.
- Concerns about privacy: The use of learning algorithms in IoT applications can raise concerns about the privacy of device data. The need for accurate location estimates must be carefully balanced in some cases with the need to protect users’ privacy.
- Security risks: Because learning algorithms are vulnerable to hacking and other forms of tampering, their use in IoT applications can pose security risks. Appropriate security measures must be implemented to protect the data and the integrity of the learning algorithms.
- Model selection: Choosing the best machine learning algorithm for a particular localization task can be difficult. Different algorithms have different strengths and weaknesses, making it difficult to select the best one for the job.
- Model interpretability: Deep learning neural networks, for example, are notoriously difficult to interpret. This can make it difficult to understand why a particular prediction was made and to improve the model.
5. Lesson Learned and Future Trends
5.1. Lesson Learned
5.2. Future Trends
- Machine learning algorithms are likely to become more integrated into the hardware and software components of IoT devices, allowing them to process and analyze data in real time and adapt to changing conditions.
- Real-time location tracking: machine learning algorithms will continue to improve the speed and accuracy of real-time location tracking, allowing devices to be tracked in real time with low latency.
- Context-aware localization: to provide more accurate location estimates, machine learning algorithms will consider contextual information such as the device’s surroundings and environment.
- More sophisticated learning algorithms: as machine learning techniques advance, more sophisticated algorithms capable of handling larger and more complex datasets will most likely be developed, resulting in more accurate location estimates.
- Increased use of machine learning in edge computing: Edge computing, which involves processing data at the network’s edge rather than in the cloud, is becoming more important in IoT applications. In the coming years, machine learning algorithms that can run efficiently on edge devices will be in high demand.
- Machine learning applications are expanding into new areas. Machine learning techniques are likely to be applied to a broader range of IoT applications as they advance, including transportation, healthcare, and environmental monitoring.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DNN | Deep neural network |
| DL | Deep learning |
| IoT | Internet of things |
| LSTM | Long-short term memory |
| SVM | Support vector machines |
| BLE | Bluetooth Low Energy |
| MLP | Multilayer perceptron |
| KNN | k-Nearest neighbors |
| ANN | Artificial neural networks |
| UWB | Ultrawideband |
| RFID | Radiofrequency identification |
| CNN | Convolutional neural network |
| MDS | Multidimensional scaling |
| EDM | Euclidean distance matrix |
| ELM | Extreme learning machine |
| MDP | Markov decision process |
| AE | Autoencoder |
| SSD | Signal strength difference |
| TDoA | Time difference of arrival |
| EKF | Extended Kalman filter |
References
- Patel, K.K.; Patel, S.M.; Scholar, P. Internet of things-IOT: Definition, characteristics, architecture, enabling technologies, application & future challenges. Int. J. Eng. Sci. Comput. 2016, 6, 6122–6131. [Google Scholar]
- Devezas, T.; Sarygulov, A. Industry 4.0; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Bécue, A.; Praça, I.; Gama, J. Artificial intelligence, cyber-threats and Industry 4.0: Challenges and opportunities. Artif. Intell. Rev. 2021, 54, 3849–3886. [Google Scholar] [CrossRef]
- Mirtaheri, S.L.; Shahbazian, R. Machine Learning: Theory to Applications; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Alanezi, M.A.; Bouchekara, H.R.; Javaid, M.S. Range-Based Localization of a Wireless Sensor Network for Internet of Things Using Received Signal Strength Indicator and the Most Valuable Player Algorithm. Technologies 2021, 9, 42. [Google Scholar] [CrossRef]
- Barshandeh, S.; Masdari, M.; Dhiman, G.; Hosseini, V.; Singh, K.K. A range-free localization algorithm for IoT networks. Int. J. Intell. Syst. 2021, 37, 10336–10379. [Google Scholar] [CrossRef]
- Nabati, M.; Ghorashi, S.A.; Shahbazian, R. Joint coordinate optimization in fingerprint-based indoor positioning. IEEE Commun. Lett. 2020, 25, 1192–1195. [Google Scholar] [CrossRef]
- Asaad, S.M.; Maghdid, H.S. A Comprehensive Review of Indoor/Outdoor Localization Solutions in IoT era: Research Challenges and Future Perspectives. Comput. Netw. 2022, 212, 109041. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. RSS-AoA-Based Target Localization and Tracking in Wireless Sensor Networks; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Shahbazian, R.; Guerriero, F. Optimized distributed large-scale analytics over decentralized data sources with imperfect communication. J. Supercomput. 2020, 76, 8510–8528. [Google Scholar] [CrossRef]
- Fard Moshiri, P.; Shahbazian, R.; Nabati, M.; Ghorashi, S.A. A CSI-based human activity recognition using deep learning. Sensors 2021, 21, 7225. [Google Scholar] [CrossRef]
- Nouali, O.; Moussaoui, S.; Derder, A. A BLE-based data collection system for IoT. In Proceedings of the 2015 First International Conference on New Technologies of Information and Communication (NTIC), Mila, Algeria, 8–9 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Mohanty, S.; Tripathy, A.; Das, B. An overview of a low energy UWB localization in IoT based system. In Proceedings of the 2021 International Symposium of Asian Control Association on Intelligent Robotics and Industrial Automation (IRIA), Goa, India, 20–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 293–296. [Google Scholar]
- Van Eck, N.J.; Waltman, L. Citation-based clustering of publications using CitNetExplorer and VOSviewer. Scientometrics 2017, 111, 1053–1070. [Google Scholar] [CrossRef] [Green Version]
- Moradbeikie, A.; Keshavarz, A.; Rostami, H.; Paiva, S.; Lopes, S.I. GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review. Appl. Sci. 2021, 11, 10793. [Google Scholar] [CrossRef]
- Kordi, K.A.; Alhammadi, A.; Roslee, M.; Alias, M.Y.; Abdullah, Q. A Review on Wireless Emerging IoT Indoor Localization. In Proceedings of the 2020 IEEE 5th International Symposium on Telecommunication Technologies (ISTT), Shah Alam, Malaysia, 9–11 November 2020; pp. 82–87. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Toward location-enabled IoT (LE-IoT): IoT positioning techniques, error sources, and error mitigation. IEEE Internet Things J. 2020, 8, 4035–4062. [Google Scholar] [CrossRef]
- Atitallah, S.B.; Driss, M.; Boulila, W.; Ghézala, H.B. Leveraging Deep Learning and IoT big data analytics to support the smart cities development: Review and future directions. Comput. Sci. Rev. 2020, 38, 100303. [Google Scholar] [CrossRef]
- Bellavista-Parent, V.; Torres-Sospedra, J.; Pérez-Navarro, A. Comprehensive Analysis of Applied Machine Learning in Indoor Positioning Based on Wi-Fi: An Extended Systematic Review. Sensors 2022, 22, 4622. [Google Scholar] [CrossRef] [PubMed]
- Alam, F.; Faulkner, N.; Parr, B. Device-Free Localization: A Review of Non-RF Techniques for Unobtrusive Indoor Positioning. IEEE Internet Things J. 2021, 8, 4228–4249. [Google Scholar] [CrossRef]
- Khan, M.A.; Saboor, A.; Kim, H.c.; Park, H. A Systematic Review of Location Aware Schemes in the Internet of Things. Sensors 2021, 21, 3228. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Mahmood, M.R.; Matin, M.A.; Sarigiannidis, P.; Goudos, S.K. A Comprehensive Review on Artificial Intelligence/Machine Learning Algorithms for Empowering the Future IoT Toward 6G Era. IEEE Access 2022, 10, 87535–87562. [Google Scholar] [CrossRef]
- Alhomayani, F.; Mahoor, M.H. Deep learning methods for fingerprint-based indoor positioning: A review. J. Locat. Based Serv. 2020, 14, 129–200. [Google Scholar] [CrossRef]
- Janssen, T.; Berkvens, R.; Weyn, M. Benchmarking RSS-based localization algorithms with LoRaWAN. Internet Things 2020, 11, 100235. [Google Scholar] [CrossRef]
- Janssen, T.; Weyn, M.; Berkvens, R. A Primer on Real-world RSS-Based Outdoor NB-IoT Localization. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Krupanek, B.; Bogacz, R. Localization technique of IoT nodes using artificial neural networks (ANN). Int. J. Electron. Telecommun. 2020, 66, 769–774. [Google Scholar]
- An, Z.; Lin, Q.; Li, P.; Yang, L. General-Purpose Deep Tracking Platform across Protocols for the Internet of Things; Association for Computing Machinery, Inc.: New York, NY, USA, 2020; pp. 94–106. [Google Scholar] [CrossRef]
- Bhatti, M.A.; Riaz, R.; Rizvi, S.S.; Shokat, S.; Riaz, F.; Kwon, S.J. Outlier detection in indoor localization and Internet of Things (IoT) using machine learning. J. Commun. Netw. 2020, 22, 236–243. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, X.; Zhang, X. Deep Learning-Based Device-Free Localization Using ZigBee; Springer: Singapore, 2020; Volume 571 LNEE, pp. 2046–2049. [Google Scholar] [CrossRef]
- Yang, M.; Wu, H. Deep learning approach for device-free localisation based on internet of things. Electron. Lett. 2020, 56, 575–577. [Google Scholar] [CrossRef]
- Wang, F.; Ma, P.; Guo, J.; Zhu, R. Localization of IoT Networks: An Empirical Bayesian Approach; IOP Publishing Ltd.: Bristol, UK, 2020; Volume 1629. [Google Scholar] [CrossRef]
- Boudani, B.E.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing deep learning techniques in 5g iot networks for 3d indoor positioning: Delta (deep learning-based co-operative architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef] [PubMed]
- D’Aloia, M.; Longo, A.; Guadagno, G.; Pulpito, M.; Fornarelli, P.; Laera, P.N.; Manni, D.; Rizzi, M. IoT Indoor Localization with AI Technique. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 654–658. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, M.; Sun, L.; Wang, X. Machine Learning Empowered IoT for Intelligent Vehicle Location in Smart Cities. ACM Trans. Internet Technol. 2021, 21, 1–25. [Google Scholar] [CrossRef]
- Ghorpade, S.N.; Zennaro, M.; Chaudhari, B.S. IoT-based hybrid optimized fuzzy threshold ELM model for localization of elderly persons. Expert Syst. Appl. 2021, 184, 115500. [Google Scholar] [CrossRef]
- Dou, F.; Lu, J.; Xu, T.; Huang, C.H.; Bi, J. A Bisection Reinforcement Learning Approach to 3-D Indoor Localization. IEEE Internet Things J. 2021, 8, 6519–6535. [Google Scholar] [CrossRef]
- Jia, B.; Zong, Z.; Huang, B.; Baker, T. A DNN-Based WiFi-RSSI Indoor Localization Method in IoT; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2021; Volume 352, pp. 200–211. [Google Scholar] [CrossRef]
- Chen, Y.S.; Hsu, C.S.; Huang, C.Y. A semi-supervised transfer learning with grid segmentation for outdoor localization over lorawans. Sensors 2021, 21, 2640. [Google Scholar] [CrossRef]
- Kim, S.; Nguyen, L.T.; Kim, J.; Shim, B. Deep Learning Based Low-Rank Matrix Completion for IoT Network Localization. IEEE Wirel. Commun. Lett. 2021, 10, 2115–2119. [Google Scholar] [CrossRef]
- Varma, P.S.; Anand, V. Random Forest Learning Based Indoor Localization as an IoT Service for Smart Buildings. Wirel. Pers. Commun. 2021, 117, 3209–3227. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. Multimodal approaches for indoor localization for ambient assisted living in smart homes. Information 2021, 12, 114. [Google Scholar] [CrossRef]
- Tiwary, P.; Pandey, A.; Kumar, S.; Youssef, M. Novel Differential r-Vectors for Localization in IoT Networks. IEEE Sens. Lett. 2021, 5, 1–4. [Google Scholar] [CrossRef]
- Jain, C.; Sashank, G.V.; Venkateswaran, N.; Markkandan, S. Low-Cost BLE Based Indoor Localization using RSSI Fingerprinting and Machine Learning. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 363–367. [Google Scholar] [CrossRef]
- Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Argyriou, V.; Sarigiannidis, A.; Eleftherakis, G.; Zhang, J. Towards 6g iot: Tracing mobile sensor nodes with deep learning clustering in uav networks. Sensors 2021, 21, 3936. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Saad, W. Semi-Supervised Learning for Channel Charting-Aided IoT Localization in Millimeter Wave Networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Ferreras, G.A.S.; Talampas, M.C.R. LoRa-Based Differential Fingerprint Localization in Outdoor Environments. In Proceedings of the 2021 IEEE 7th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 14 June–31 July 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 710–715. [Google Scholar] [CrossRef]
- Raghav, R.S.; Thirugnanasambandam, K.; Varadarajan, V.; Vairavasundaram, S.; Ravi, L. Artificial Bee Colony Reinforced Extended Kalman Filter Localization Algorithm in Internet of Things with Big Data Blending Technique for Finding the Accurate Position of Reference Nodes. Big Data 2022, 10, 186–203. [Google Scholar] [CrossRef] [PubMed]
- Shurrab, M.; Singh, S.; Mizouni, R.; Otrok, H. IoT Sensor Selection for Target Localization: A Reinforcement Learning based Approach. Ad Hoc Netw. 2022, 134, 102927. [Google Scholar] [CrossRef]
- Zhou, M.; Li, Y.; Pu, Q.; Nie, W.; Wilford, A.; Jiang, Q. Connectivity-Based Localization Scheme for Social Internet of Things. IEEE Trans. Comput. Soc. Syst. 2022, 9, 1671–1681. [Google Scholar] [CrossRef]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Jung, H.; Dev, K. Analysis of time-weighted LoRa-based positioning using machine learning. Comput. Commun. 2022, 193, 266–278. [Google Scholar] [CrossRef]
- Manasreh, D.; Swaleh, S.; Cohen, K.; Nazzal, M. Semi-Supervised Physics-Informed Genetic Fuzzy System for IoT BLE Localization. TechRxiv 2022. [Google Scholar] [CrossRef]
- Aqeel, I.; Iorkyase, E.; Zangoti, H.; Tachtatzis, C.; Atkinson, R.; Aondonovic, I. LoRaWAN-implemented node localisation based on received signal strength indicator. IET Wirel. Sens. Syst. 2022. [Google Scholar] [CrossRef]
- Panduman, Y.Y.F.; Funabiki, N.; Puspitaningayu, P.; Kuribayashi, M.; Sukaridhoto, S.; Kao, W.C. Design and Implementation of SEMAR IoT Server Platform with Applications. Sensors 2022, 22, 6436. [Google Scholar] [CrossRef]
- Chen, X.; Li, H.; Zhou, C.; Liu, X.; Wu, D.; Dudek, G. Fidora: Robust WiFi-Based Indoor Localization via Unsupervised Domain Adaptation. IEEE Internet Things J. 2022, 9, 9872–9888. [Google Scholar] [CrossRef]
- Wu, W.; Shen, L.; Zhao, Z.; Li, M.; Huang, G.Q. Industrial IoT and Long Short-Term Memory Network-Enabled Genetic Indoor-Tracking for Factory Logistics. IEEE Trans. Ind. Inform. 2022, 18, 7537–7548. [Google Scholar] [CrossRef]
- Ko, J.; Kim, H.; Kim, J. Real-Time Sound Source Localization for Low-Power IoT Devices Based on Multi-Stream CNN. Sensors 2022, 22, 4650. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Sheng, Q.Z. Deep CNN-LSTM Network for Indoor Location Estimation using Analog Signals of Passive Infrared Sensors. IEEE Internet Things J. 2022, 9, 22582–22594. [Google Scholar] [CrossRef]
- Chen, L.W.; Weng, C.C. Time-Dependent Visiting Trip Planning with Crowd Density Prediction Based on Internet of Things Localization. IEEE Trans. Mob. Comput. 2022. [Google Scholar] [CrossRef]
- Jia, J.; Yu, R.; Du, Z.; Chen, J.; Wang, Q.; Wang, X. Distributed localization for IoT with multi-agent reinforcement learning. Neural Comput. Appl. 2022, 34, 7227–7240. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, X.; Ji, W.; Liu, Y.; Han, G.; Xie, Y. Stacked Autoencoders-Based Localization Without Ranging over Internet of Things. IEEE Internet Things J. 2022, 9, 7826–7841. [Google Scholar] [CrossRef]
- Gang, Q.; Muhammad, A.; Khan, Z.U.; Khan, M.S.; Ahmed, F.; Ahmad, J. Machine Learning-Based Prediction of Node Localization Accuracy in IIoT-Based MI-UWSNs and Design of a TD Coil for Omnidirectional Communication. Sustainability 2022, 14, 9683. [Google Scholar] [CrossRef]
- Moshiri, P.F.; Navidan, H.; Shahbazian, R.; Ghorashi, S.A.; Windridge, D. Using GAN to enhance the accuracy of indoor human activity recognition. arXiv 2020, arXiv:2004.11228. [Google Scholar]
- Yang, L.; Wu, N.; Li, B.; Yuan, W.; Hanzo, L. Indoor Localization Based on Factor Graphs: A Unified Framework. IEEE Internet Things J. 2022, 10, 4353–4366. [Google Scholar] [CrossRef]
- Yuan, W.; Wu, N.; Guo, Q.; Huang, X.; Li, Y.; Hanzo, L. TOA-Based Passive Localization Constructed Over Factor Graphs: A Unified Framework. IEEE Trans. Commun. 2019, 67, 6952–6965. [Google Scholar] [CrossRef] [Green Version]
- Xiong, W.; Schindelhauer, C.; So, H.C.; Rupitsch, S.J. A Message Passing Based Iterative Algorithm for Robust TOA Positioning in Impulsive Noise. IEEE Trans. Veh. Technol. 2023, 72, 1048–1057. [Google Scholar] [CrossRef]
- Chauchat, P.; Barrau, A.; Bonnabel, S. Factor Graph-Based Smoothing Without Matrix Inversion for Highly Precise Localization. IEEE Trans. Control Syst. Technol. 2021, 29, 1219–1232. [Google Scholar] [CrossRef]
- Li, B.; Wu, N.; Wu, Y.C.; Li, Y. Convergence-Guaranteed Parametric Bayesian Distributed Cooperative Localization. IEEE Trans. Wirel. Commun. 2022, 21, 8179–8192. [Google Scholar] [CrossRef]
- Xiong, Y.; Wu, N.; Shen, Y.; Win, M.Z. Cooperative Localization in Massive Networks. IEEE Trans. Inf. Theory 2022, 68, 1237–1258. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, S. Cooperative Localization in Wireless Sensor Networks with AOA Ranging Measurements. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, S.; Hou, Y.; Gao, F.; Ji, X. A novel IoT access architecture for vehicle monitoring system. In Proceedings of the 2016 IEEE 3rd World Forum on Internet of Things (WF-IoT), Reston, VA, USA, 12–14 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 639–642. [Google Scholar]
- Papadakis, N.; Koukoulas, N.; Christakis, I.; Stavrakas, I.; Kandris, D. An IoT-based participatory antitheft system for public safety enhancement in smart cities. Smart Cities 2021, 4, 919–937. [Google Scholar] [CrossRef]
- Rodriguez-Sanchez, M.C.; Fernández-Jiménez, L.; Jiménez, A.R.; Vaquero, J.; Borromeo, S.; Lázaro-Galilea, J.L. Helpresponder—System for the security of first responder interventions. Sensors 2021, 21, 2614. [Google Scholar] [CrossRef]
- Mpeis, P.; Roussel, T.; Kumar, M.; Costa, C.; LaoudiasDenis, C.; Capot-Ray, D.; Zeinalipour-Yazti, D. The anyplace 4.0 iot localization architecture. In Proceedings of the 2020 21st IEEE International Conference on Mobile Data Management (MDM), Versailles, France, 30 June–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 218–225. [Google Scholar]
- Zheng, L.; Hu, B.J.; Qiu, J.; Cui, M. A deep-learning-based self-calibration time-reversal fingerprinting localization approach on Wi-Fi platform. IEEE Internet Things J. 2020, 7, 7072–7083. [Google Scholar] [CrossRef]



| Reference | Type of Localization | Year Range | Focus | Machine Learning Techniques |
|---|---|---|---|---|
| Asaad and Maghdid [9] | Outdoor and indoor | 2019–2021 | Classification based on wireless techniques, sensors, environments, objects, and metrics | - |
| Moradbeikie et al. [16] | GNSS-free outdoor localization for the IoT | 2018–August 2021 | Cloud, fog, and edge-AI-based architectures | Mentions some deep learning in a limited number of related works |
| Kordi et al. [17] | Wireless emerging IoT indoor localization | 2016–2019 | Classification based on localization techniques | Very limited number of learning-based methods (papers) are covered |
| Rathin Chandra Shit et al. [5] | IoT localization | Before 2018 | Taxonomy of localization methods (self-determining, training-dependent) | Focuses on localization (not learning); Covers limited papers on fingerprinting, stochastic model process, machine learning approaches |
| Li et al. [18] | Location-enabled IoT | Before 2020 | Positioning techniques, error sources, error mitigation | Focus on error source and error mitigation, limited learning-based methods are introduced |
| Atitallah et al. [19] | Deep learning and big data analytics for smart cities | 2017–2018 | Learning-based localization in passing | Addresses only two learning-based publications |
| Bellavista-Parent, Torres-Sospedra, and Pérez-Navarro [20] | WiFi-based indoor positioning | 2016–2021 | Focuses only on WiFi-indoor localization | Categorization based on machine learning techniques (DRL, ELM, CNN, DNN, BPNN, CapsNet, SDA, VAE, DQN, SVM, Bayesian methods) |
| Alam, Faulkner, and Parr [21] | Non-RF techniques for unobtrusive indoor positioning | 2010–2020 | Location-based services using visible light, infrared, vibration, pressure, and an electric field | - |
| Khan et al. [22] | Location-aware IoT | Before 2021 | Classification based on applications, smartphone usage, security, energy efficiency, target recovery, target prediction capabilities | - |
| Farahsari et al. [23] | Indoor positioning systems for IoT-based applications | Before 2022 | Classification based on scale, environment, and initial user, communication technologies (short-range, long-range, signal-type) | - |
| Mahmood et al. [24] | Machine learning algorithm applications for future IoT | Before 2022 | Evaluation of future communication networks (3G to 6G), algorithm type (heuristic, supervised, unsupervised, deep learning, reinforcement learning, deep reinforcement learning, federated learning) | Focuses only on communication networks (3G to 6G) based on machine learning algorithms |
| Alhomayani and Mahoor [25] | Fingerprint-based indoor positioning | Before 2020 | Fingerprint-based indoor positioning | Only deep learning methods are covered |
| Our Survey | Indoor, outdoor, fingerprint, LoRaWan, | 2020 to the end of 2022 | Localization techniques with machine learning support | All the machine learning techniques in the literature |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahbazian, R.; Macrina, G.; Scalzo, E.; Guerriero, F. Machine Learning Assists IoT Localization: A Review of Current Challenges and Future Trends. Sensors 2023, 23, 3551. https://doi.org/10.3390/s23073551
Shahbazian R, Macrina G, Scalzo E, Guerriero F. Machine Learning Assists IoT Localization: A Review of Current Challenges and Future Trends. Sensors. 2023; 23(7):3551. https://doi.org/10.3390/s23073551
Chicago/Turabian StyleShahbazian, Reza, Giusy Macrina, Edoardo Scalzo, and Francesca Guerriero. 2023. "Machine Learning Assists IoT Localization: A Review of Current Challenges and Future Trends" Sensors 23, no. 7: 3551. https://doi.org/10.3390/s23073551