

An Asynchronous Collision-Tolerant ACRDA Scheme Based on Satellite-Selection Collaboration-Beamforming for LEO Satellite IoT Networks

Abstract
:1. Introduction
- When the signal transmitted by satellite is subjected to beamforming processing by the gateway station, the participation of some channel nodes with poor channel quality in collaboration processing will reduce system performance. To address this issue, we proposed a collaborative multi-satellite selection algorithm based on maximum SINR. The algorithm solves the satellite selection problem in multi-satellite cooperative beamforming by constructing and solving a non-convex optimization problem. In order to make the optimization problem solvable, we use the Charnes-Cooper transformation to convert the non-convex problem into a convex optimization problem with optimization parameters. The optimized parameter determines the number of satellites selected. For the selection of optimized parameters, we design an iterative binary search algorithm to obtain optimal values;
- Regarding the problem of packet collision caused by the massive concurrent access of IoT terminals in LEO IoT network traffic surge. Under the ACRDA retransmission mechanism, an asynchronous collision-tolerant ACRDA scheme based on satellite-selection collaboration-beamforming is proposed by combining the proposed algorithm and SIC technology. The collided packets can be successfully demodulated through the power difference generated by the collaborative multi-satellite selection algorithm based on the maximum SINR algorithm. The demodulated packets can be reused for SIC. Simulation results show that the proposed scheme effectively solves the deadlock problem of packet collision under medium to high loads and improves system throughput.
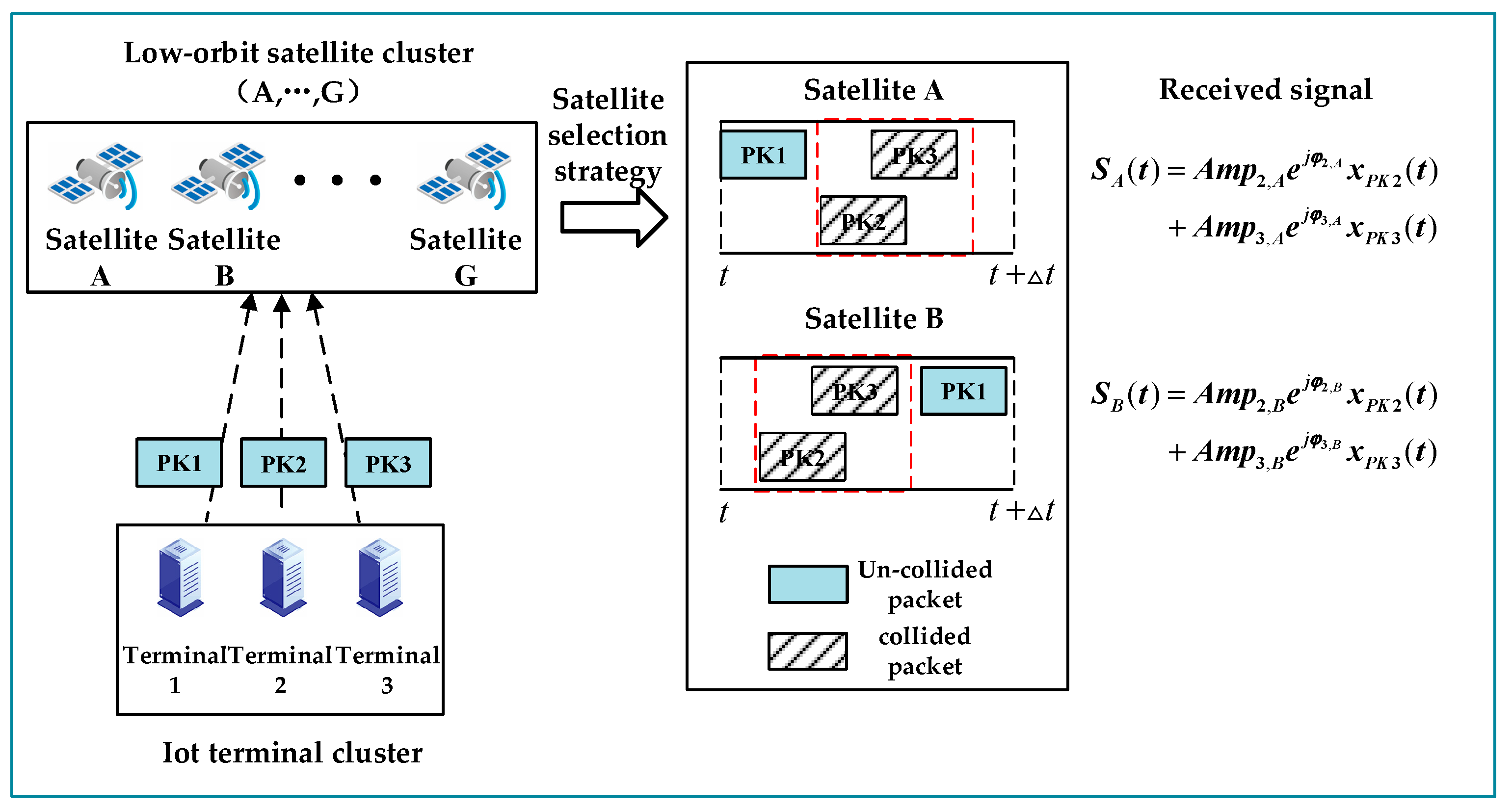
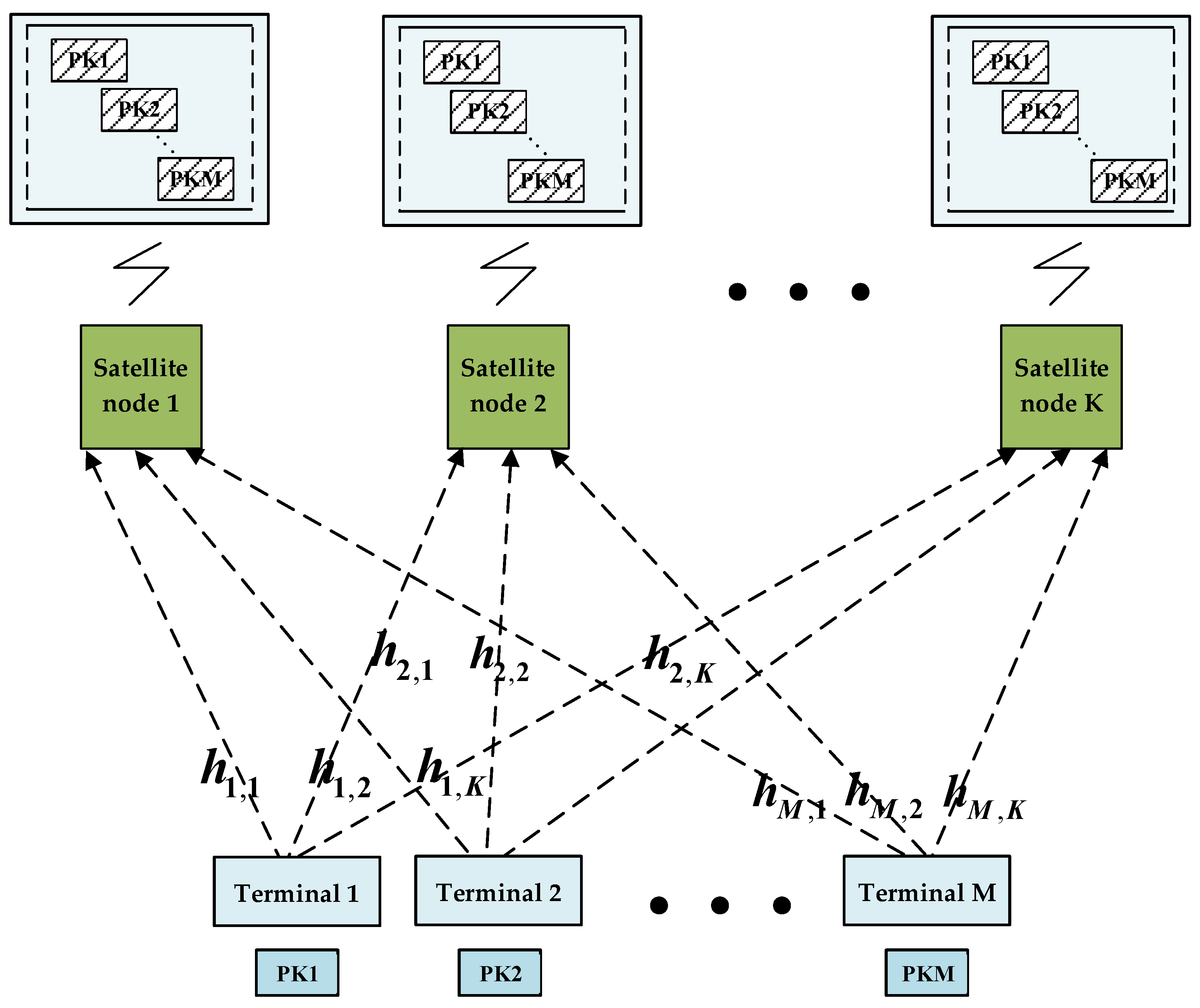
2. System Model
3. A Collaborative Multi-Satellite Selection Algorithm Based on Maximum SINR
3.1. Proposed Satellite Selection Strategy
Construction of Optimization Problem for Maximizing SINR
| Algorithm 1: Iterative binary search method of parameter |
| Step 1: Initialization |
| Set the desired number of collaboration nodes: ; Set initial upper limit ; Set initial lower limit ; Set the initial value ; Define as the number of non-zero diagonal elements of matrix ; Substitute into Equation (12), calculate matrix and count . |
| Step 2: Iterative selection of optimal |
| (1) while () if // greater than optimal value , so reduce the upper limit if () ; ; else ; ; end if // less than optimal value , so increase the lower limit if () ; ; else ; end end end (2) while (), the optimal value can be obtained. Substituting into the optimization problem Equation (12), the matrix can be calculated. |
| Step 3: Determining the optimal subset of collaborations |
| After obtaining matrix , count its diagonal non-zero element indices and determine the optimal collaborative subset . |
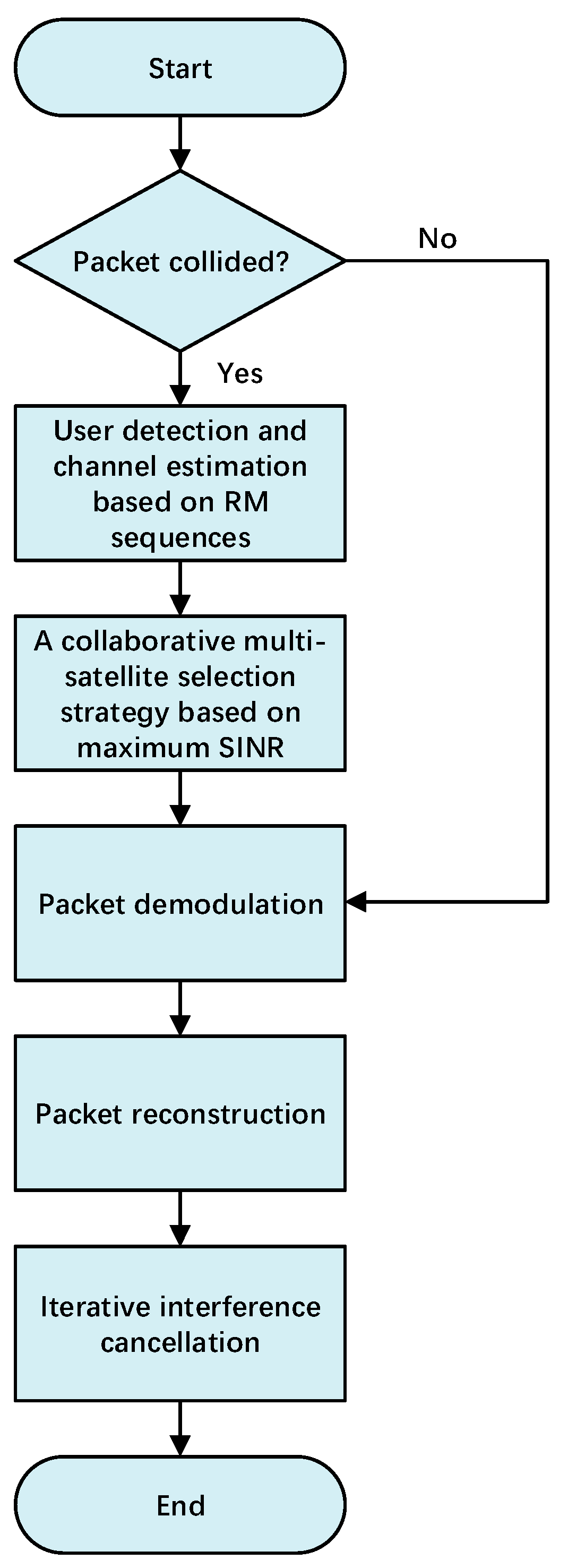
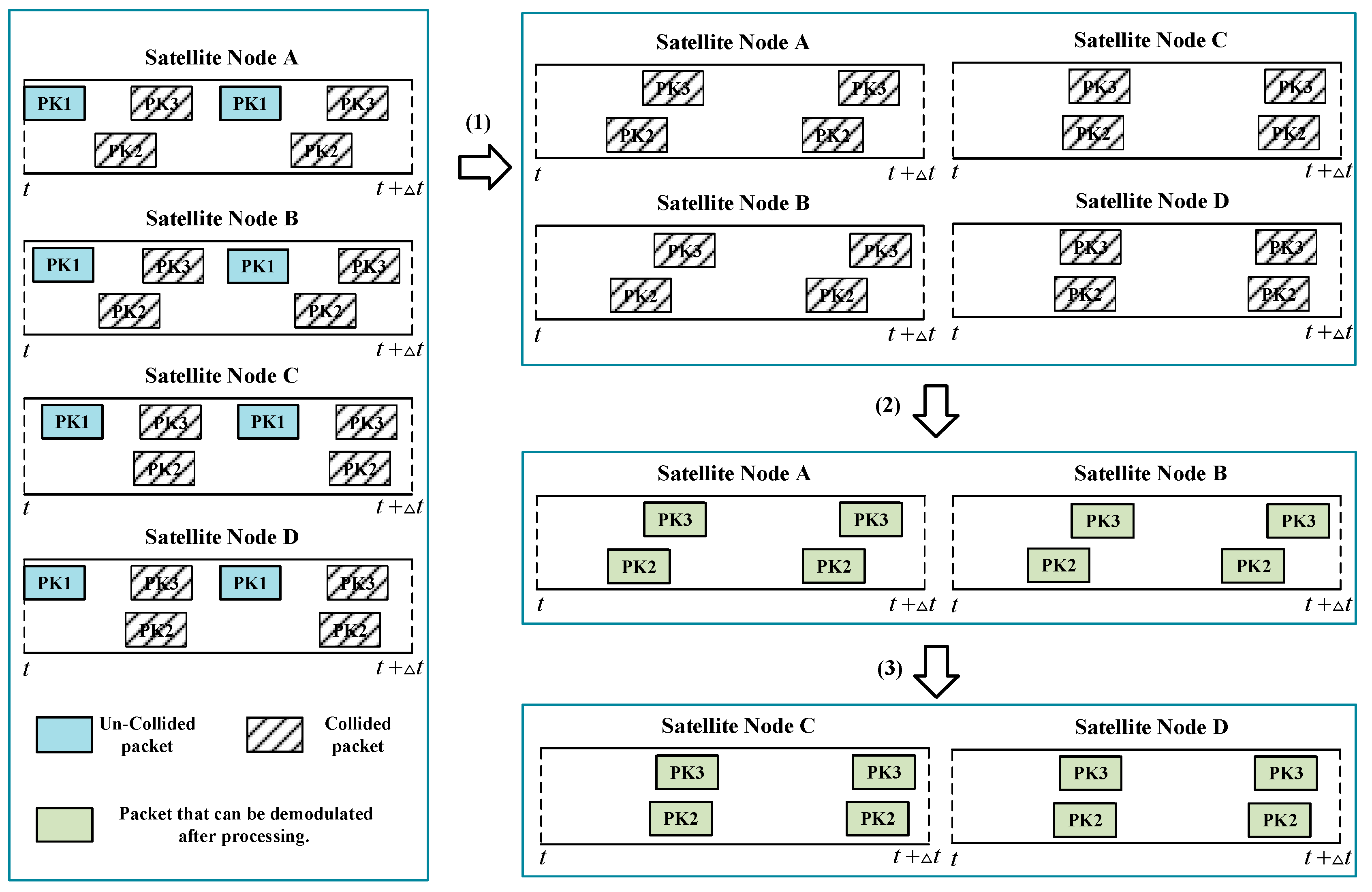
4. An Asynchronous Collision-Tolerant ACRDA Scheme Based on Satellite-Selection Collaboration-Beamforming
4.1. Design of SC-ACRDA
4.2. Performance Analysis
5. Simulation and Analysis
5.1. Performance of Multi-Satellite Selection Algorithm Based on Maximum SINR
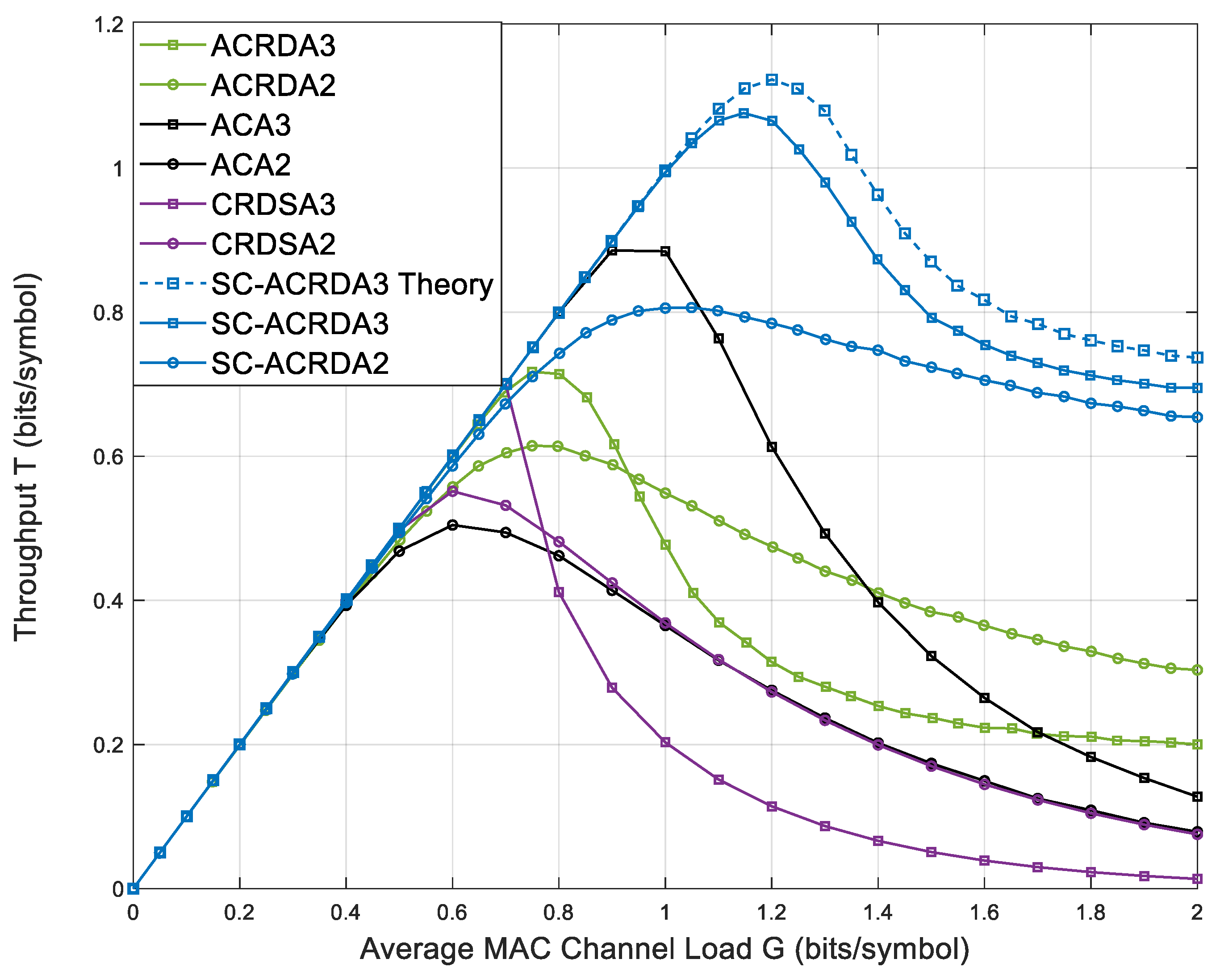
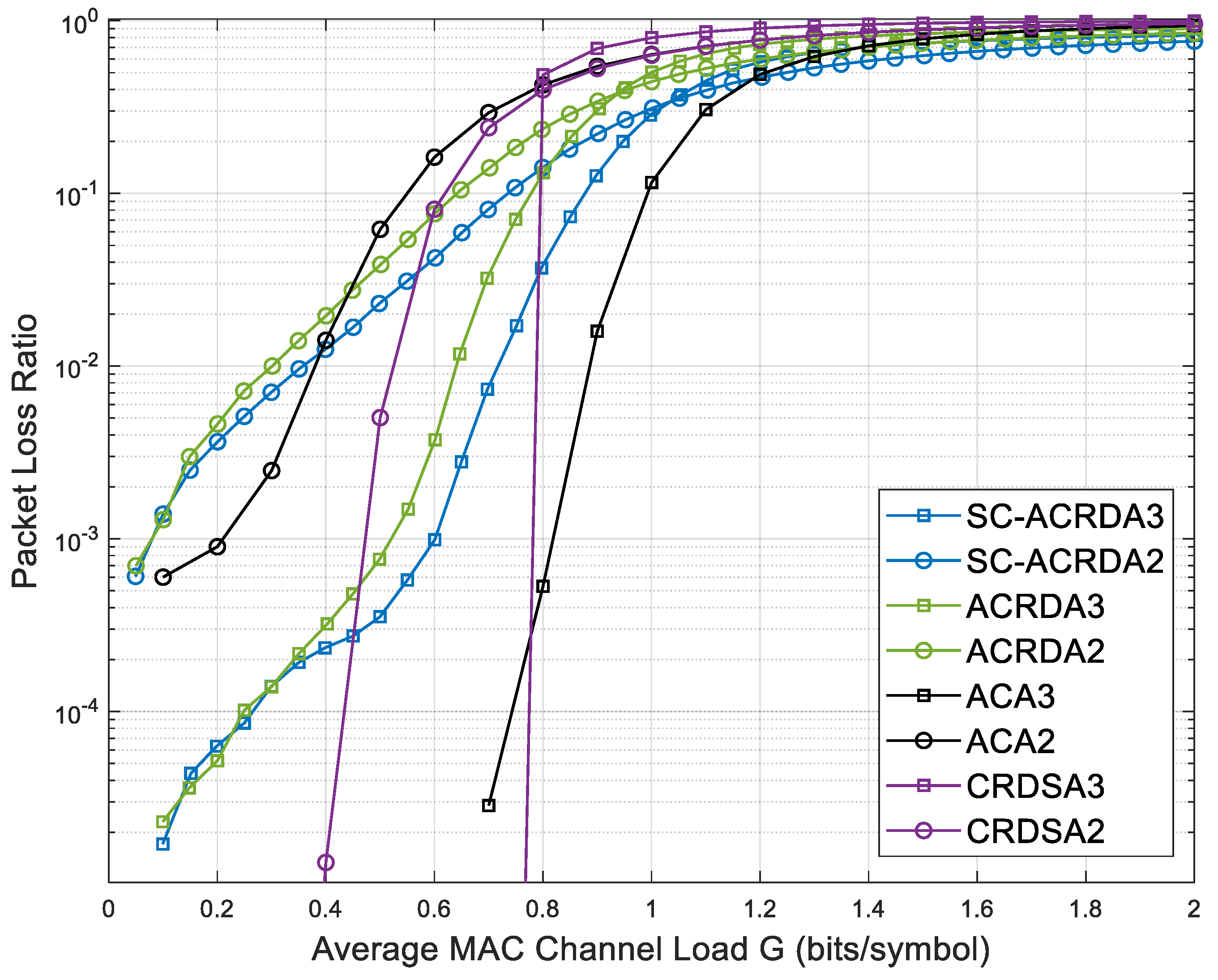
5.2. Performance of SC-ACRDA
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stefano, C.; Riccardo, D.G.; Nicolas, G. On the Satellite Role in the Era of 5G Massive Machine Type Communications. IEEE Netw. 2018, 32, 54–61. [Google Scholar]
- Lin, Z.; Lin, M.; Cola, D.T.; Wang, J.B.; Zhu, W.P.; Cheng, J. Supporting IoT with rate-splitting multiple access in satellite and aerial-integrated networks. IEEE Internet Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- Janjua, K.; Shah, M.A.; Almogren, A.; Khattak, H.A.; Maple, C.; Din, I.U. Proactive Forensics in IoT: Privacy-Aware Log-Preservation Architecture in Fog-Enabled-Cloud Using Holochain and Containerization Technologies. Electronic 2020, 9, 1172. [Google Scholar] [CrossRef]
- Haseeb, K.; Din, I.U.; Almogren, A.; Islam, N.; Altameem, A. RTS: A Robust and Trusted Scheme for IoT-Based Mobile Wireless Mesh Networks. IEEE Access 2020, 8, 68379–68390. [Google Scholar] [CrossRef]
- Chien, W.C.; Lai, C.F.; Hossain, M.S.; Muhammad, G. Heterogeneous Space and Terrestrial Integrated Networks for IoT: Architecture and Challenges. IEEE Netw. 2019, 33, 15–21. [Google Scholar] [CrossRef]
- Mauro, D.S.; Ernestina, C.; Giuseppe, A.; Igor, B.; Ramjee, P. Satellite Communications Supporting Internet of Remote Things. IEEE Internet Things J. 2015, 3, 113–123. [Google Scholar]
- Nils, P.; Inigo, D.P.; Edward, F.C.; Bruce, G.C. An Updated Comparison of Four Low Earth Orbit Satellite Constellation Systems to Provide Global Broadband. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops 2021), Montreal, QC, Canada, 14–23 June 2021; pp. 1–7. [Google Scholar]
- Tong, D.; Venkata, D. Starlink Space Network-Enhanced Cyber–Physical Power System. IEEE Trans. Smart Grid 2021, 12, 3673–3675. [Google Scholar]
- Abramson, N. Multiple Access in Wireless Digital Networks. Proc. IEEE 1994, 82, 1360–1370. [Google Scholar] [CrossRef]
- Roberts, L.G. ALOHA packet system with and without slots and capture. Acm Sigcomm Comput. Commun. Rev. 1975, 5, 28–42. [Google Scholar] [CrossRef]
- Choudhury, G.; Rappaport, S. Diversity ALOHA–A Random Access Scheme for Satellite Communications. Commun. IEEE Trans. 1983, 31, 450–457. [Google Scholar] [CrossRef]
- Casini, E.; Gaudenzi, R.D.; Herrero, O.D.R. Contention Resolution Diversity Slotted ALOHA (CRDSA): An Enhanced Random Access Scheme for Satellite Access Packet Networks. IEEE Trans. Wirel. Commun. 2007, 6, 1408–1417. [Google Scholar] [CrossRef]
- Ghanbarinejad, M.; Schlegel, C. Irregular repetition slotted ALOHA with multiuser detection. In Proceedings of the Wireless On-demand Network Systems and Services (WONS), Banff, AB, Canada, 18–20 March 2013; pp. 201–205. [Google Scholar]
- Bui, H.; Lacan, J.; Boucheret, M.L. An enhanced multiple random access scheme for satellite communications. In Proceedings of the Wireless Telecommunications Symposium 2012 (WTS-2012), London, UK, 18–20 April 2012; pp. 1–6. [Google Scholar]
- Rapajic, P.B.; Vucetic, B.S. A slotted ALOHA spread spectrum system with adaptive receivers. In Proceedings of the ISSSTA’95 International Symposium on Spread Spectrum Techniques and Applications, Mainz, Germany, 25–25 September 1996; pp. 1133–1136. [Google Scholar]
- Reichman, A. Enhanced Spread Spectrum Aloha (E-SSA), an emerging satellite return link messaging scheme. In Proceedings of the 2014 IEEE 28th Convention of Electrical & Electronics Engineers in Israel (IEEEI), Eilat, Israel, 3–5 December 2014; pp. 1–4. [Google Scholar]
- Gaudenzi, R.D.; Herrero, O.D.; Acar, G.; Barrabés, E.G. Asynchronous Contention Resolution Diversity ALOHA: Making CRDSA Truly Asynchronous. IEEE Trans. Wirel. Commun. 2014, 13, 6193–6206. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secure beamforming for cognitive satellite terrestrial networks with unknown eavesdroppers. IEEE Syst. J. 2021, 15, 2186–2189. [Google Scholar] [CrossRef]
- Lin, Z.; An, K.; Niu, H.; Hu, Y.; Chatzinotas, S.; Zheng, G.; Wang, J. SLNR-based secure energy efficient beamforming in multibeam satellite systems. IEEE Trans. Aerosp. Electron. Syst. 2022. early access. [Google Scholar] [CrossRef]
- Bo, Z.; Guangliang, R.; Huining, Z. Multisatellite Cooperative Random Access Scheme in Low Earth Orbit Satellite Networks. IEEE Syst. J. 2019, 13, 2617–2628. [Google Scholar]
- Li, P.; He, Y.; Cui, G.; He, J.; Wang, W. Asynchronous Cooperative Aloha for Multi-Receiver Satellite Communication Networks. IEEE Commun. Lett. 2017, 21, 1321–1324. [Google Scholar] [CrossRef]
- Ding, J.; Qu, D.; Liu, P.; Choi, J. Machine Learning Enabled Preamble Collision Resolution in Distributed Massive MIMO. IEEE Trans. Commun. 2021, 69, 2317–2330. [Google Scholar] [CrossRef]
- Liu, R.; Hong, T.; Ding, X.; Wang, Y.; Zhang, G. Multi-Satellite Cooperative Beamforming ALOHA for LEO Satellite IoT Networks. Front. Space Technol. 2021, 2, 755520. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Hanzo, L. Joint Active User Detection and Channel Estimation in Massive Access Systems Exploiting Reed–Muller Sequences. IEEE J. Sel. Top. Signal Process. 2019, 13, 739–752. [Google Scholar] [CrossRef] [Green Version]
- Bourbaki, N.; Eggleston, H.; Madan, S. Topological Vector Spaces; Springer-Verlag: Berlin, Germany, 1987; pp. 62–64. [Google Scholar]
- Charnes, A.; Cooper, W.W. Programming with linear fractional functionals. Nav. Res. Logist 1962, 9, 181–186. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secrecy-energy efficient hybrid beamforming for satellite-terrestrial integrated networks. IEEE Trans. Commun. 2021, 69, 6345–6360. [Google Scholar] [CrossRef]
- Blanco, L.; Nájar, M. Sparse Multiple Relay Selection for Network Beamforming With Individual Power Constraints Using Semidefinite Relaxation. IEEE Trans. Wirel. Commun. 2016, 15, 1206–1217. [Google Scholar] [CrossRef] [Green Version]
- Oscar, R.H.; Riccardo, D.G. Generalized Analytical Framework for the Performance Assessment of Slotted Random Access Protocols. IEEE Trans. Wirel. Commun. 2014, 13, 809–821. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| LEO constellation | OneWeb |
| Maximum number of visible satellites | 16 |
| Number of transmitting sources | 200 |
| Number of virtual frames | 2 |
| Virtual frame length | 100 slots |
| Packet arrival rate | [0.00:0.05:2.00] |
| Channel coding rate | 1/3 |
| Modulation indices | 4 |
| 10 | |
| Collided packet demodulation threshold | 7 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, T.; Liu, R.; Liu, Z.; Ding, X.; Zhang, G. An Asynchronous Collision-Tolerant ACRDA Scheme Based on Satellite-Selection Collaboration-Beamforming for LEO Satellite IoT Networks. Sensors 2023, 23, 3549. https://doi.org/10.3390/s23073549
Hong T, Liu R, Liu Z, Ding X, Zhang G. An Asynchronous Collision-Tolerant ACRDA Scheme Based on Satellite-Selection Collaboration-Beamforming for LEO Satellite IoT Networks. Sensors. 2023; 23(7):3549. https://doi.org/10.3390/s23073549
Chicago/Turabian StyleHong, Tao, Rui Liu, Ziwei Liu, Xiaojin Ding, and Gengxin Zhang. 2023. "An Asynchronous Collision-Tolerant ACRDA Scheme Based on Satellite-Selection Collaboration-Beamforming for LEO Satellite IoT Networks" Sensors 23, no. 7: 3549. https://doi.org/10.3390/s23073549