
Traffic Breakdown Probability Estimation for Mixed Flow of Autonomous Vehicles and Human Driven Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Stochastic Temporal Queueing Model for Traffic Breakdown Probability
2.1. Some Background
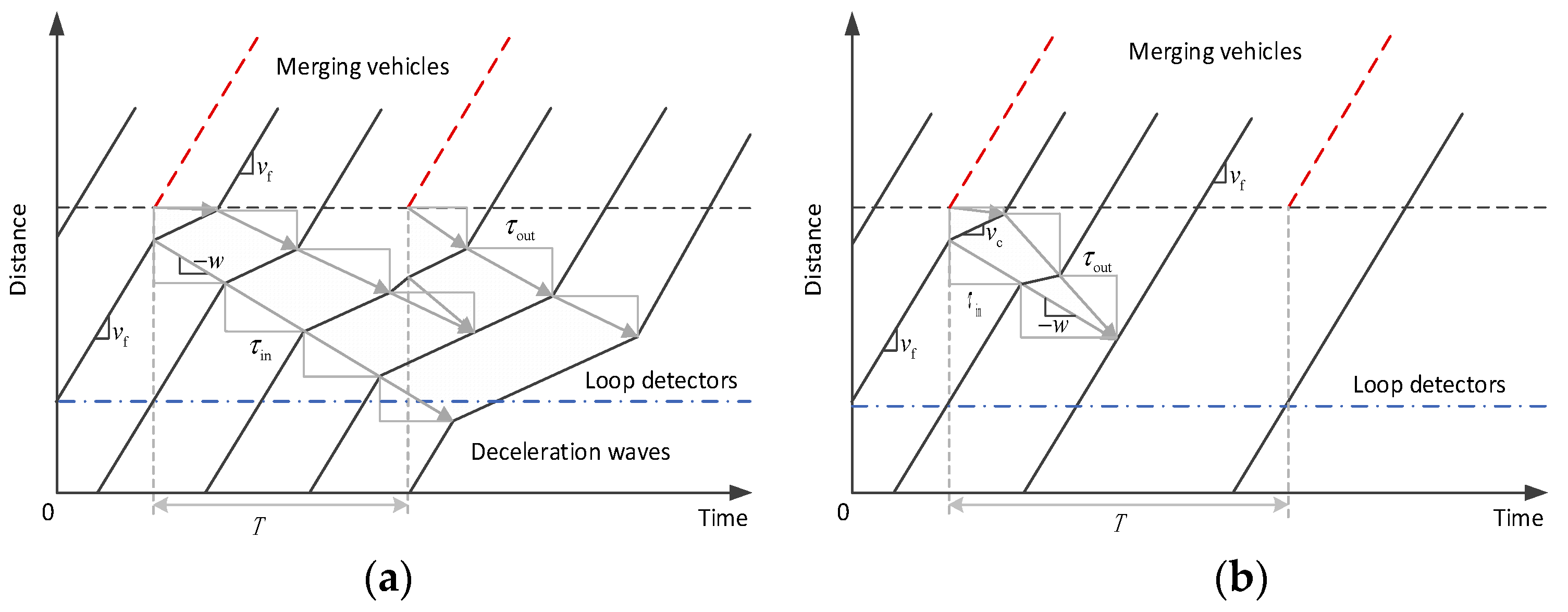
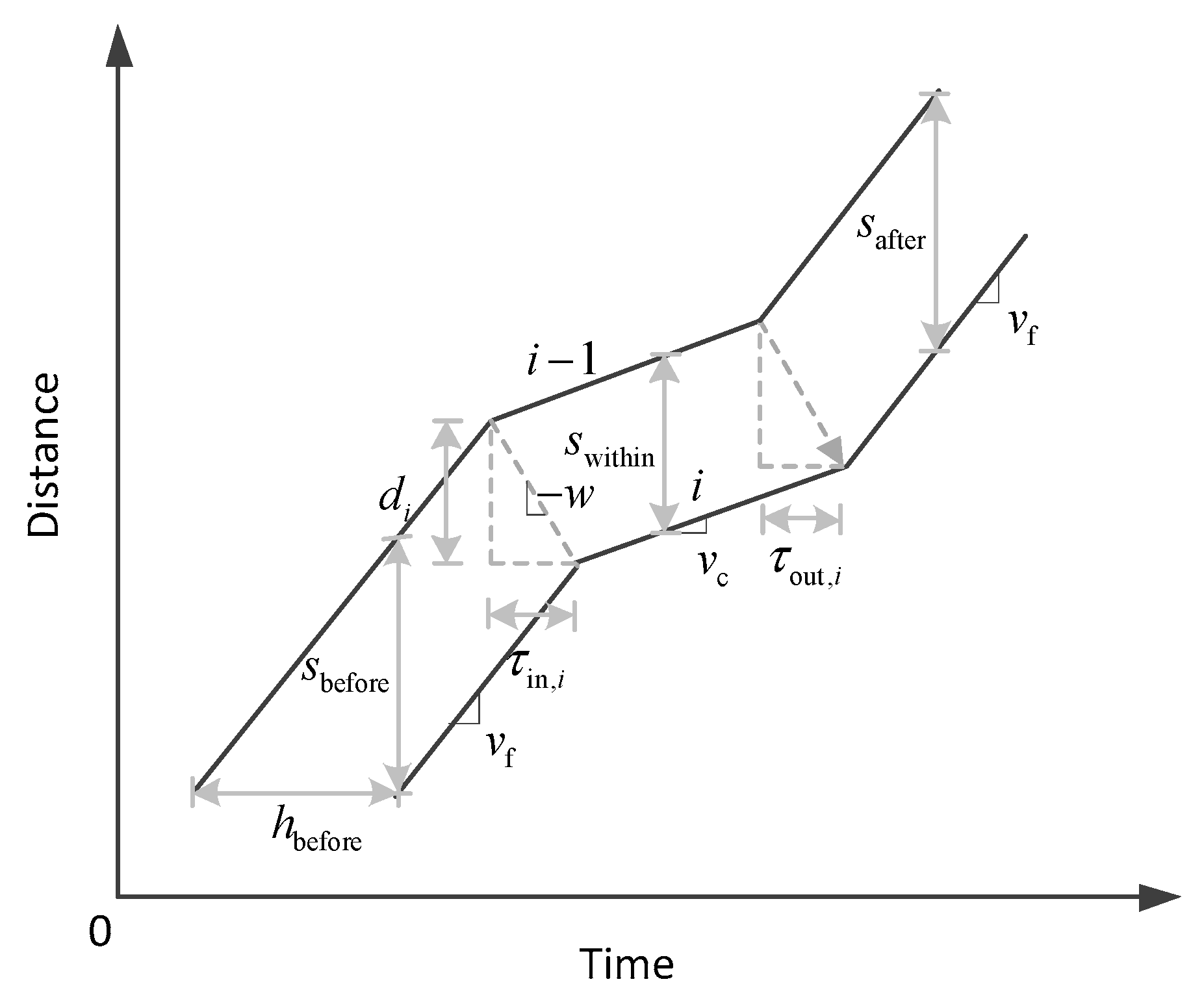
2.2. A Deterministic Temporal–Spatial Queueing Model
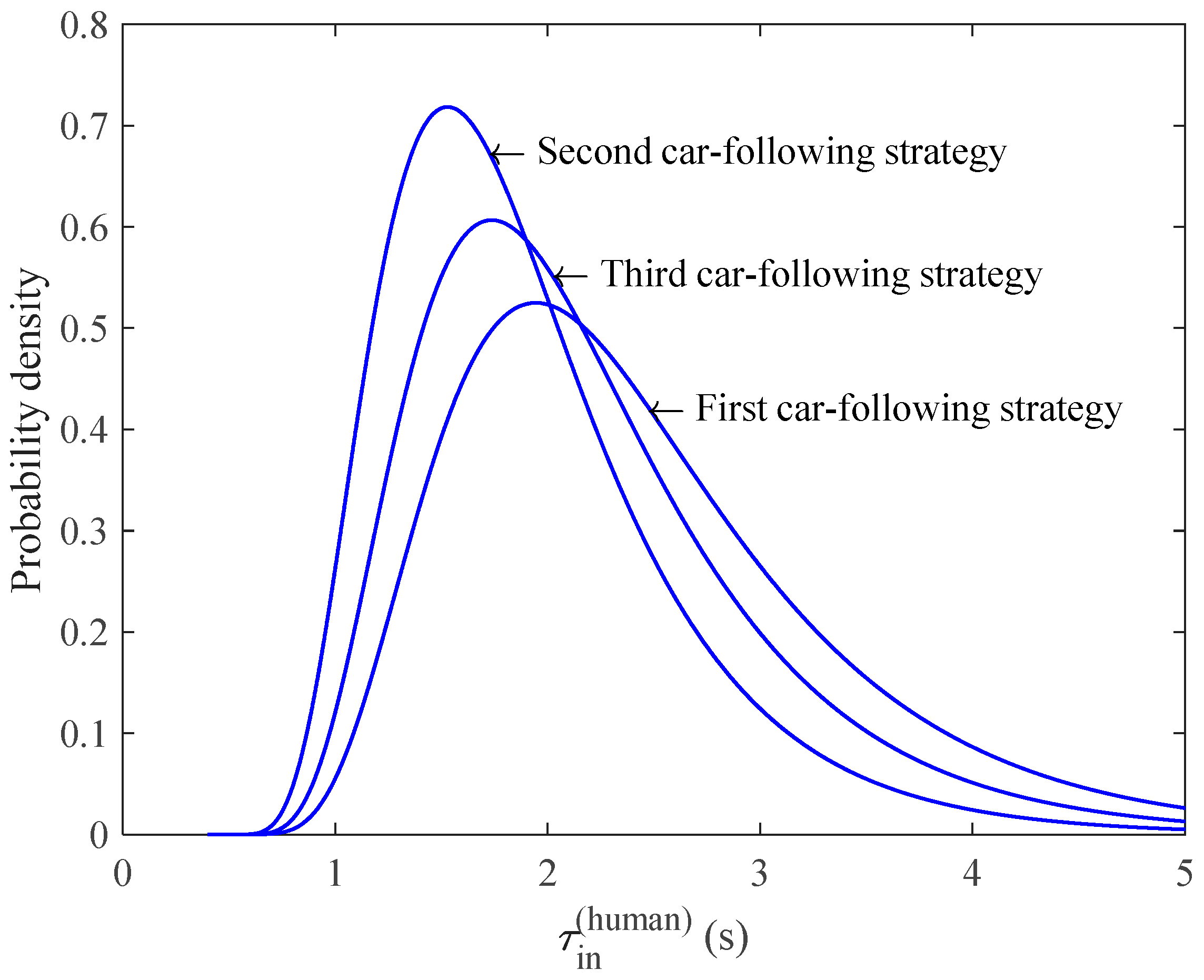
2.3. Possible Influence of Car-Following Styles of Automated Vehicles
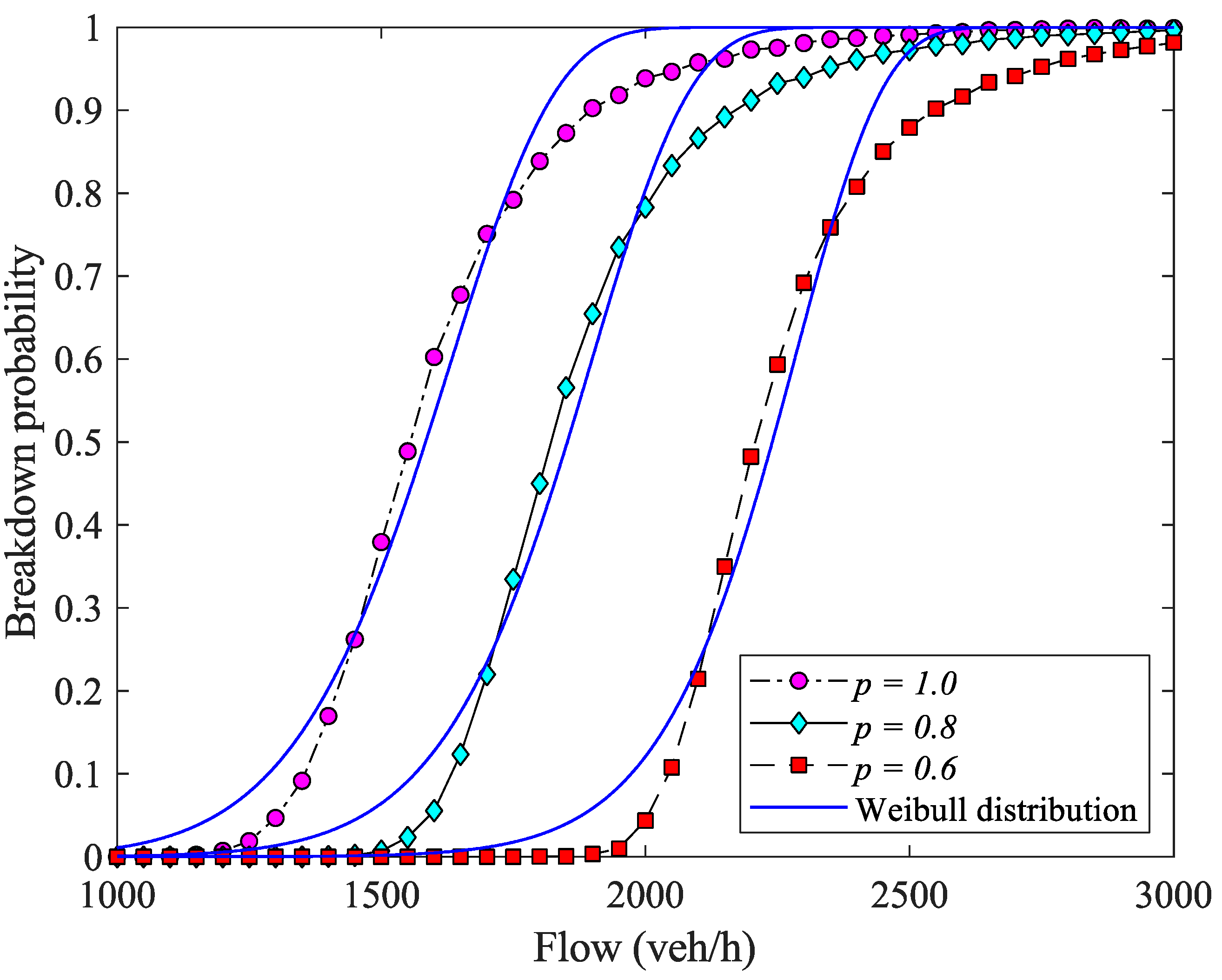
2.4. A Stochastic Temporal Queueing Model for Mixed Traffic
- (1)
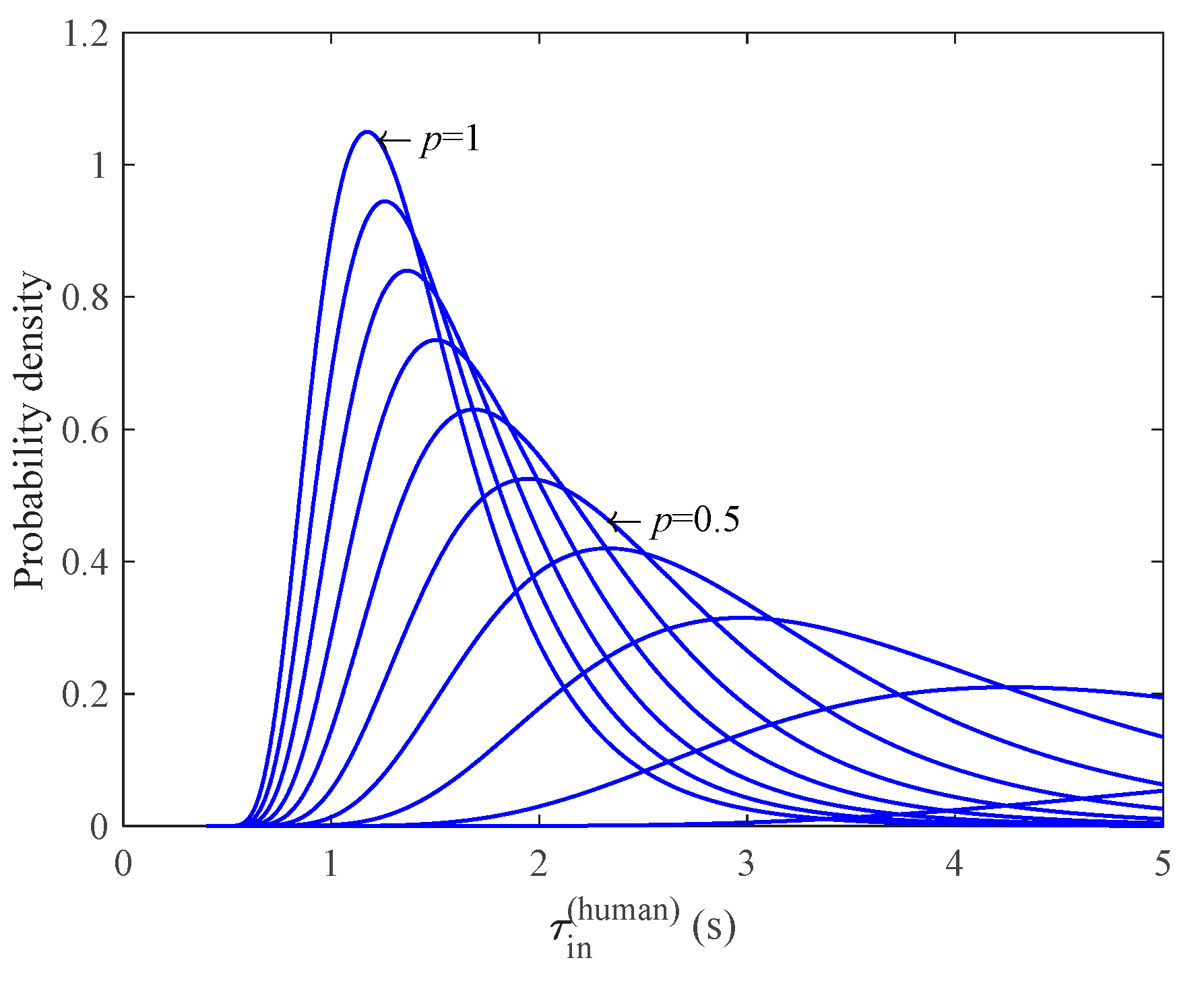
- We assume the jam queue join time for human driven vehicles is a random variable whose distribution changes with the main road flow rate;
- (2)
- We assume the jam queue join time for automated vehicles is a determinant variable whose value linearly changes with the main road flow rate; and different types of automated vehicles will have different spacing policies;
- (3)
- We assume the jam wave speeds for both automated vehicles and human driven vehicles are the same constant, as automated vehicles need to mimic the preferred car-following behaviors of human drivers.
3. Results
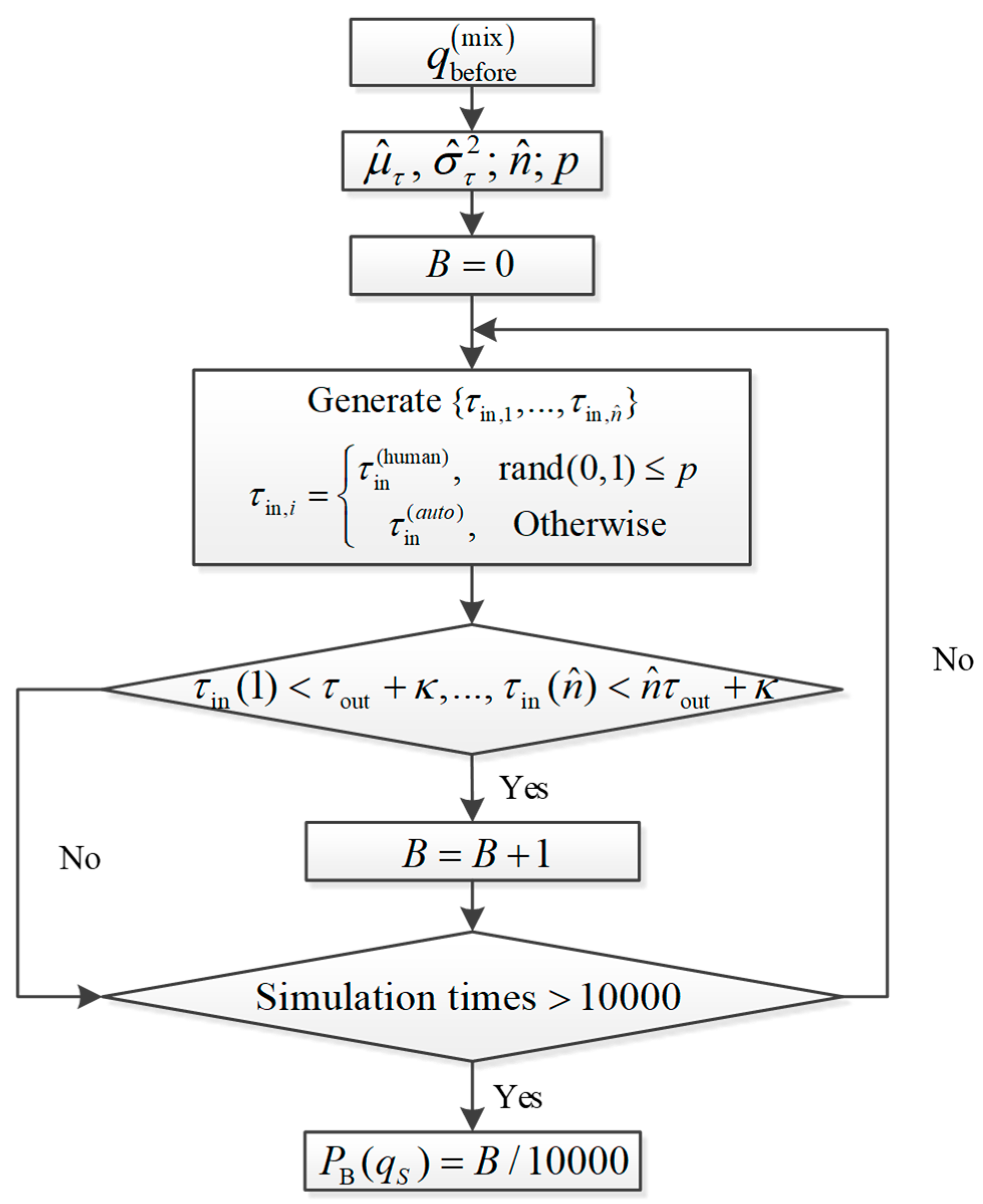
3.1. The Monte Carlo Simulation Procedure
3.2. Parameter Settings
3.3. Simulation Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Elefteriadou, L.; Roess, R.; McShane, W. Probabilistic nature of breakdown at freeway merge junctions. Transp. Res. Rec. 1995, 1484, 80–89. [Google Scholar]
- Kerner, B.S.; Klenov, S.L. Probabilistic breakdown phenomenon at on-ramp bottlenecks in three-phase traffic theory: Congestion nucleation in spatially non-homogeneous traffic. Phys. A Stat. Mech. Its Appl. 2006, 364, 473–492. [Google Scholar] [CrossRef]
- Bassan, S.; Ceder, A. Analysis of maximum traffic flow and its breakdown on congested freeways. Phys. A Stat. Mech. Its Appl. 2008, 387, 4349–4366. [Google Scholar] [CrossRef]
- Kondyli, A.; Elefteriadou, L. Modeling driver behavior at freeway-ramp merges. Transp. Res. Rec. 2011, 2249, 29–37. [Google Scholar] [CrossRef]
- Persaud, B.; Yagar, S.; Brownlee, R. Exploration of the breakdown phenomenon in freeway traffic. Transp. Res. Rec. 1998, 1634, 64–69. [Google Scholar] [CrossRef]
- Banks, J.H. New Approach to Bottleneck Capacity Analysis: Final Report; California PATH Research Report; Institute of Transportation Studies, University of California: Berkeley, CA, USA, 2006. [Google Scholar]
- Coifman, B.; Kim, S. Extended bottlenecks, the fundamental relationship, and capacity drop on freeways. Transp. Res. A Policy Pract. 2011, 45, 980–991. [Google Scholar] [CrossRef]
- Shawky, M.; Nakamura, H. Characteristics of breakdown phenomenon in merging sections of urban expressways in Japan. Transp. Res. Rec. 2007, 2012, 11–19. [Google Scholar] [CrossRef]
- Geistefeldt, J.; Brilon, W. A comparative assessment of stochastic capacity estimation methods. In Proceedings of the 18th International Symposium on Traffic and Transportation Theory, Hong Kong, 16–18 July 2009; Lam, W., Wong, S.C., Lo, H.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 583–602. [Google Scholar]
- Kim, T.; Zhang, H.M. A stochastic wave propagation model. Transp. Res. B Methodol. 2008, 42, 619–634. [Google Scholar] [CrossRef]
- Son, B.; Kim, T.; Kim, H.J.; Lee, S. Probabilistic model of traffic breakdown with random propagation of disturbance for ITS application. Lect. Notes Comput. Sci. 2004, 3215, 45–51. [Google Scholar]
- Mahnke, R.; Pieret, N. Stochastic master-equation approach to aggregation in freeway traffic. Phys. Rev. E 1997, 56, 2666–2671. [Google Scholar] [CrossRef]
- Kühne, R.; Mahnke, R.; Lubashevsky, I.; Kaupužs, J. Probabilistic description of traffic breakdowns. Phys. Rev. E 2002, 65, 066125. [Google Scholar] [CrossRef] [Green Version]
- Mahnke, R.; Kaupužs, J.; Lubashevsky, I. Probabilistic description of traffic flow. Phys. Rep. 2005, 408, 1–130. [Google Scholar] [CrossRef]
- Kühne, R.; Lüdtke, A. Traffic breakdowns and freeway capacity as extreme value statistics. Transp. Res. C Emerg. Technol. 2013, 27, 159–168. [Google Scholar] [CrossRef]
- Kim, T.; Zhang, H.M. Gap time and stochastic wave propagation. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, WA, USA, 3–6 October 2004; IEEE: New York, NY, USA, 2004; pp. 88–93. [Google Scholar]
- Chen, X.; Li, Z.; Li, L. A traffic breakdown model based on queueing theory. Netw. Spat. Econ. 2014, 14, 485–504. [Google Scholar] [CrossRef]
- Yu, H.; Jiang, R.; He, Z.; Zheng, Z.; Li, L.; Liu, R.; Chen, X. Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives. Transp. Res. Part C Emerg. Technol. 2021, 127, 103101. [Google Scholar] [CrossRef]
- Zhang, J.; Pei, H.; Ban, X.J.; Li, L. Analysis of cooperative driving strategies at road network level with macroscopic fundamental diagram. Transp. Res. Part C Emerg. Technol. 2022, 135, 103503. [Google Scholar] [CrossRef]
- Zhao, C.; Li, L.; Pei, X.; Li, Z.; Wang, F.Y.; Wu, X. A comparative study of state-of-the-art driving strategies for autonomous vehicles. Accid. Anal. Prev. 2021, 150, 105937. [Google Scholar] [CrossRef]
- Daganzo, C.F. Remarks on Traffic Flow Modeling and Its Applications. 1997. Available online: http://www.ce.berkeley.edu/~daganzo/PAPER.PDF (accessed on 9 January 2023).
- Mahnke, R.; Kühne, R. Probabilistic description of traffic breakdown. Traffic Granul. Flow 2007, 05, 527–536. [Google Scholar]
- Kühne, R.; Mahnke, R.; Hinkel, J. Understanding traffic breakdown: A stochastic approach. Transp. Traffic Theory 2007, 17, 777–789. [Google Scholar]
- Persaud, B.; Yagar, S.; Tsui, D.; Look, H. Breakdown-related capacity for freeway with ramp metering. Transp. Res. Rec. 2001, 1748, 110–115. [Google Scholar] [CrossRef]
- Brilon, W.; Geistefeldt, J.; Zurlinden, H. Implementing the concept of reliability for highway capacity analysis. Transp. Res. Rec. 2007, 2027, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ozbay, K.; Ozguven, E.E. A comparative methodology for estimating the capacity of a freeway section. In Proceedings of the 10th International IEEE Conference on Intelligent Transportation Systems, Bellevue, WA, USA, 30 September–3 October 2007; pp. 1034–1039. [Google Scholar]
- Schönhof, M.; Helbing, D. Empirical features of congested traffic states and their implications for traffic modeling. Transp. Sci. 2007, 41, 135–166. [Google Scholar] [CrossRef] [Green Version]
- Treiber, M.; Kesting, A.; Helbing, D. Three-phase traffic theory and two-phase models with a fundamental diagram in the light of empirical stylized facts. Transp. Res. B Methodol. 2010, 44, 983–1000. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Li, Z.; Li, L. Phase diagram analysis based on a temporal-spatial queueing model. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1705–1716. [Google Scholar] [CrossRef]
- Newell, G.F. A simplified car-following theory: A lower order model. Transp. Res. B Methodol. 2002, 36, 195–205. [Google Scholar] [CrossRef]
- Sae International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE Int. 2018, 4970, 1–5. [Google Scholar]
- Michael, J.B.; Godbole, D.N.; Lygeros, J.; Sengupta, R. Capacity analysis of traffic flow over a single-lane automated highway system. J. Intell. Transp. Syst. 1998, 4, 49–80. [Google Scholar] [CrossRef]
- Arnaout, G.M.; Arnaout, J.P. Exploring the effects of cooperative adaptive cruise control on highway traffic flow using microscopic traffic simulation. Transp. Plan. Technol. 2014, 37, 186–199. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, Y.; Li, S.E.; Cao, Z.; Liu, H.X.; Li, L. String stability for vehicular platoon control: Definitions and analysis methods. Annu. Rev. Control 2019, 47, 81–97. [Google Scholar] [CrossRef]
- Wang, Q.; Li, Z.; Yao, D.; Zhang, Y.; Li, L.I.; Hu, J. Analysis on road capacity for mixed manual/automated traffic. In Proceedings of the 14th COTA International Conference of Transportation Professionals (CICTP 2014): Safe, Smart, and Sustainable Multimodal Transportation Systems, Changsha, China, 4–7 July 2014; pp. 351–358. [Google Scholar]
- Sun, J.; Zheng, Z.; Sun, J. The relationship between car following string instability and traffic oscillations in finite-sized platoons and its use in easing congestion via connected and automated vehicles with IDM based controller. Transp. Res. Part B Methodol. 2020, 142, 58–83. [Google Scholar] [CrossRef]
- Jin, X.; Zhang, Y.; Wang, F.; Li, L.; Yao, D.; Su, Y.; Wei, Z. Departure headways at signalized intersections: A log-normal distribution model approach. Transp. Res. C Emerg. Technol. 2009, 17, 318–327. [Google Scholar] [CrossRef]
- Chen, X.; Li, L.; Zhang, Y. A Markov model for headway/gap distribution of road traffic. IEEE Trans. Intell. Transp. Syst. 2010, 11, 773–785. [Google Scholar] [CrossRef]
- Fishman, G.S. Monte Carlo: Concepts, Algorithms, and Applications; Springer: New York, NY, USA, 1995. [Google Scholar]
- Kalos, M.H.; Whitlock, P.A. Monte Carlo Methods, 2nd ed.; Wiley-VCH: Weinheim, Germany, 2008. [Google Scholar]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, L.; Wei, J.; Zhang, X.; Guo, W.; Zhang, K. Traffic Breakdown Probability Estimation for Mixed Flow of Autonomous Vehicles and Human Driven Vehicles. Sensors 2023, 23, 3486. https://doi.org/10.3390/s23073486
Su L, Wei J, Zhang X, Guo W, Zhang K. Traffic Breakdown Probability Estimation for Mixed Flow of Autonomous Vehicles and Human Driven Vehicles. Sensors. 2023; 23(7):3486. https://doi.org/10.3390/s23073486
Chicago/Turabian StyleSu, Lichen, Jing Wei, Xinwei Zhang, Weiwei Guo, and Kai Zhang. 2023. "Traffic Breakdown Probability Estimation for Mixed Flow of Autonomous Vehicles and Human Driven Vehicles" Sensors 23, no. 7: 3486. https://doi.org/10.3390/s23073486