

A Review of Laser Ultrasonic Lamb Wave Damage Detection Methods for Thin-Walled Structures
Abstract
:1. Introduction
2. Characteristics of LU-LDM
- (1)
- Broadband characteristics
- (2)
- Low-order anti-symmetric mode
- (3)
- Limitations: low signal-to-noise ratio
- (4)
- Hardware configuration with flexibility
- (5)
- Exact laser vibration measurement
3. Classification Criteria and Overall Framework
4. Detection Method Based on Full Wavefield Data
4.1. Detection Methods in the f-k Domain
4.1.1. Wavenumber Filtering
4.1.2. Local Wavenumber Estimation
4.2. Detection Methods in the t-Domain
4.2.1. Anomalous Wave Propagation Imaging
4.2.2. Cross-Correlation Imaging
4.2.3. Cumulative Standing Wave Energy
4.3. Detection Methods in the f-Domain
4.4. Nonlinear Ultrasound Detection Method
4.5. Analysis of Comparison and Application
5. Detection Method Based on the Small Amount of Wavefield Data
5.1. Sparse Distribution
5.1.1. Geometric Positioning Method
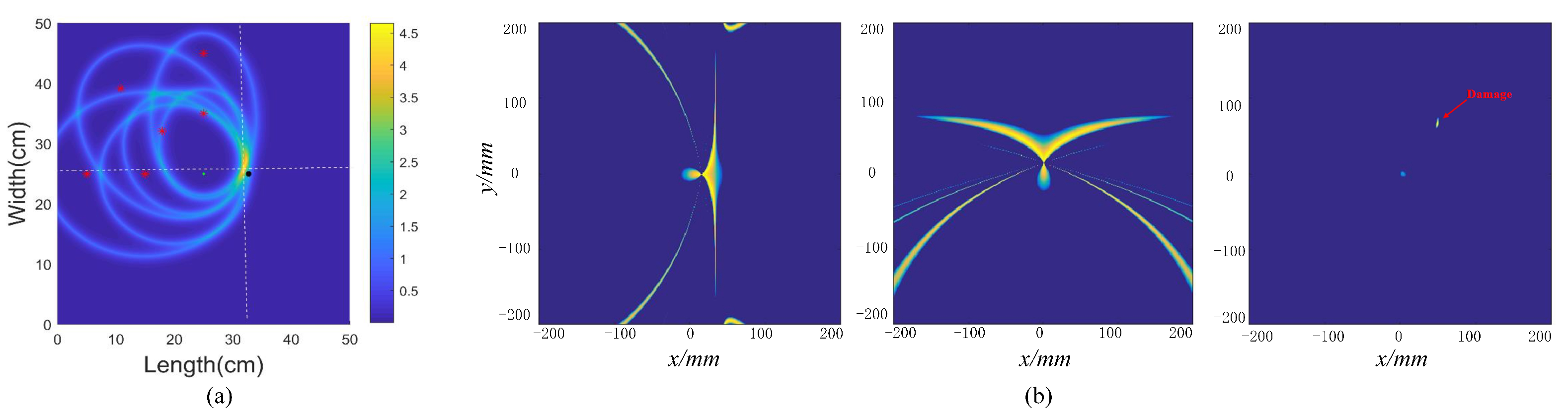
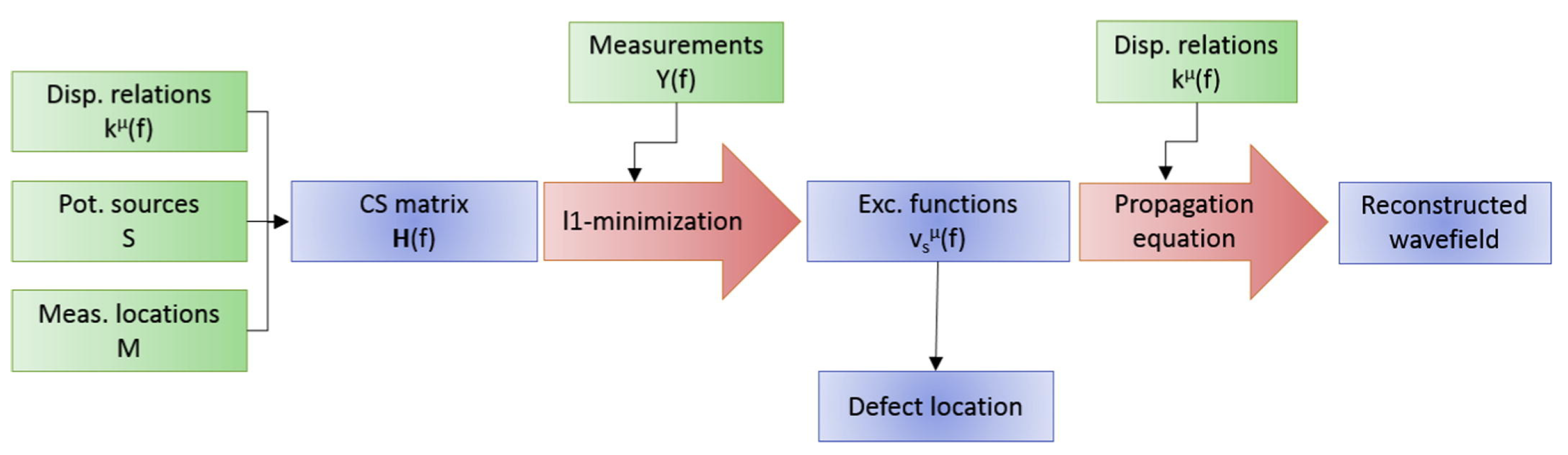
5.1.2. Damage Detection Based on Compression Sensing
5.2. Dense Array Distribution
5.2.1. Phased Array Imaging
5.2.2. Multiple Signal Classification
- (1)
- Many topological arrays are designed, such as line [91], cross [92,93], petal [94], bilinear [95], biflabellate [96], and sparse [97]. The near-field 2D-MUSIC algorithm is used to locate the damage. The scattering waves are described as spherical waves when the damage is located in the near-field range. The 2D-MUSIC algorithm has a 2D-steering vector, and the near-field spatial spectrum is estimated as in Equation (5) [91]:where is a two-dimensional steering vector, r and are the scanning distance and angle, respectively. denotes the noise subspace tensed by the matrix of eigenvectors corresponding to small eigenvalues. By varying r and to scan each spatial point, the peak point of the spatial spectrum corresponds to the impact source/damage.
- (2)
- MUSIC assumes that the incident wave is a single-frequency continuous wave, but laser ultrasonic Lamb waves have broadband characteristics. Shannon wavelets are good at extracting the narrowband component [98].
- (3)
- It is not easy to artificially set the threshold to select the eigenvalues of the covariance matrix. For this reason, researchers proposed Gerschgorin’s disc theorem, based on unitary transform, which can judge the number of wave sources more directly [91].
- (4)
- When there are multiple damages close to each other, or the damage is close to the boundary, the scattering wave interference causes the singularity of the covariance matrix. Researchers introduced a spatial smoothing method to average the covariance matrix of multiple subarrays to obtain a smoothed covariance matrix [91]. This method was only used for linear arrays.
5.2.3. Ultrasonic Lamb Wave Tomography
5.3. Intelligent Detection Methods Based on Machine Learning
5.4. Analysis of Comparison and Application
6. Combination of Multiple Methods to Balance Efficiency and Accuracy
- (1)
- Combination of fast localization and high-precision imaging methods [135]. For damage detection over a large area, a small amount of wavefield data is first collected to roughly localize the damage. Then, a dense scan of the local wavefield is used to accurately quantify the damage. Combining multiple methods enables different methods to exert their advantages at different stages.
- (2)
- The combination of CS and PAI imaging [136]. In a large area, sparse wavefield data are randomly collected, and the wavefield data of a dense array are reconstructed using the principle of CS. Based on this data, damage localization is achieved using PAI. This combination has a random wavefield acquisition, is not limited by the array, and saves many operations caused by reconstructing the full wavefield.
- (3)
- Laser ultrasonic Lamb waves were combined with the laser ultrasonic body wave detection method [137]. The longitudinal waves penetrate the structure in a short time without dispersion [139,140,141]. The wavelength of longitudinal waves can reach the micron level and is more sensitive to damage in the thickness direction. A combination strategy involves using Lamb wave detection to obtain a rough location of the damage, followed by laser ultrasonic body wave imaging to achieve higher accuracy.
- (4)
- Multiple CNN with different functions is constructed to achieve hierarchical detection [138]. In the outer loop, the damage detection model predicts the structure’s damage state (with or without). The inner loop predicts the damage’s location only when the outer loop’s detection result is present. This combination enables high-precision damage localization at the millisecond level.
7. Future Perspectives
- (1)
- Promote the application of LU on actual project sites. Most detection objects in the existing studies are simplified to thin plates, but structures are complex, such as wing ribs, reinforcement bars, and screw holes. In the future, LU-LDM must solve real problems as the ultimate goal, build physical models of actual structures and study the corresponding detection methods.
- (2)
- Research and development of a multi-channel laser ultrasonic testing system. The need for repetitive excitation and acquisition affects the improvement of detection efficiency. A laser vibrometer with multi-point synchronous acquisition can be developed to constitute a multi-channel laser ultrasonic detection system.
- (3)
- Promote the application of laser ultrasonic modulation in time and space. Contact piezoelectric transducers can excite single-frequency continuous waves and narrowband signals. Compared with laser, its advantage lies in the strong selectivity of frequency and mode. The ultrasonic Lamb wave generated by a single laser spot is a broadband signal with no directivity. Optical devices, such as lenses and gratings, changing the shape of the laser spot, and, thereby, controlling the directivity and bandwidth of the ultrasonic wave.
- (4)
- The existing research has focused on formed damage of centimeter size. However, the formation process is from initiation to evolution. Nonlinear ultrasound Lamb waves are susceptible to early microscopic damage of materials, such as fatigue cracks and creep holes. Therefore, using nonlinear LU-LDM to monitor material creep-damage and initiation-damage formation is a future development direction.
- (5)
- Deep integration of laser ultrasonic detection methods with ML. At present, most methods are transplants of existing methods, which actually do not effectively utilize their specialties in solving nonlinear mapping relationships in damage detection. Future research must investigate the correlation between damage and signal features and build multi-level ML models between data and damage details.
8. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chia, C.C.; Lee, J.R.; Park, C.Y.; Jeong, H.M. Laser ultrasonic anomalous wave propagation imaging method with adjacent wave subtraction: Application to actual damages in composite wing. Opt. Laser Technol. 2012, 44, 428–440. [Google Scholar] [CrossRef]
- Papanaboina, M.R.; Jasiuniene, E. The defect identification and localization using ultrasonic guided waves in aluminum alloy. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 490–493. [Google Scholar]
- Grammatikopoulos, A. The effects of geometric detail on the vibratory responses of complex ship-like thin-walled structures. Mar. Struct. 2021, 78, 103013. [Google Scholar] [CrossRef]
- Choi, Y.; Lee, J.R. Multi-directional adjacent wave subtraction and shifted time point mapping algorithms and their application to defect visualization in a space tank liner. Ndt E Int. 2017, 86, 53–64. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, B.; Zhang, S. The advancement of 7xxx series aluminum alloys for aircraft structures: A review. Metals 2021, 11, 718. [Google Scholar] [CrossRef]
- Baker, A.A. Composite Materials for Aircraft Structures; AIAA: Reston VA, USA, 2004. [Google Scholar]
- Jin, H.; Wang, Y.; Sun, H.; Li, W.; Qing, X. Identification and imaging of multi-defects on a complicated composite structure by ultrasonic guided wave. Polym. Test. 2022, 106, 107466. [Google Scholar] [CrossRef]
- Gu, G.H.; Kim, R.E.; Kim, E.S.; Kim, Y.; Kwon, H.; Ahn, S.Y.; Seo, M.H.; Kim, H.S. Multi-scale investigation on local strain and damage evolution of Al1050/steel/Al1050 clad sheet. J. Mater. Res. Technol. 2022, 20, 128–138. [Google Scholar] [CrossRef]
- Khan, A.; Kim, N.; Shin, J.K.; Kim, H.S.; Youn, B.D. Damage assessment of smart composite structures via machine learning: A review. JMST Adv. 2019, 1, 107–124. [Google Scholar] [CrossRef] [Green Version]
- Dajani, S.A.A.A.; Dacus, B.R.; Dennett, C.A.; Burke, M.G.; Waldron, L.; Byun, T.S.; Wall, J.J.; Anglin, K.B.-D.; Dajani, O.A.A.A.; Krakowiak, K.J.; et al. Detecting Thermally-Induced Spinodal Decomposition with Picosecond Ultrasonics in Cast Austenitic Stainless Steels. Acta Mater. 2023, 246, 118552. [Google Scholar] [CrossRef]
- Olisa, S.C.; Khan, M.A.; Starr, A. Review of current guided wave ultrasonic testing (GWUT) limitations and future directions. Sensors 2021, 21, 811. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Drain, L. Laser Ultrasonics: Techniques and Applications; Routledge: Oxfordshire, UK, 2019. [Google Scholar]
- Liu, P.; Sohn, H. Numerical simulation of damage detection using laser-generated ultrasound. Ultrasonics 2016, 69, 248–258. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Zhang, C.; Ji, H.; Tao, C. Non-Destructive Testing for Aerospace Composite Structures Using Laser Ultrasonic Technique. Aeronaut. Manuf. Technol. 2020, 63, 14–23. [Google Scholar]
- Ma, Y.; Hu, Z.; Tang, Y.; Sheng, Z.; Ma, S.; Hu, X.; Luo, W.; Zeng, Q.; Guo, L. Investigation of the mechanism and influence of laser wavelength and energy on laser opto-ultrasonic dual detection. Appl. Opt. 2020, 59, 9591–9597. [Google Scholar] [CrossRef] [PubMed]
- Monchalin, J. Non contact generation and detection of ultrasound with lasers. In Proceedings of the 16th World Conference on Nondestructive Testing, Montreal, QC, Canada, 30 August–3 September 2004; pp. 1–9. [Google Scholar]
- Sun, X.; Tian, Z.; Lin, B.; Yu, L. Guided wave damage detection with PZT-FBG sensing. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, and Civil Infrastructure 2016, Las Vegas, NV, USA, 21–24 March 2016; Volume 9804, pp. 388–396. [Google Scholar]
- Ahmed, H.; Mohsin, A.; Hong, S.C.; Lee, J.R.; Ihn, J.B. Robotic laser sensing and laser mirror excitation for pulse-echo scanning inspection of fixed composite structures with non-planar geometries. Measurement 2021, 176, 109109. [Google Scholar] [CrossRef]
- Monchalin, J.P. Laser-Ultrasonics: From the Laboratory to Industry; American Institute of Physics: College Park, MD, USA, 2004; Volume 700, pp. 3–31. [Google Scholar]
- James, V.; Carswell, D.; Riise, J.; Nicholson, P.I.; Graf, N.; Huber, N.; Gärtner, M.; Reitinger, B.; Scherleitner, E.; Burgholzer, P.; et al. Robot Deployed Laser-Ultrasonic NDT System for Inspection of Large Aircraft Structures; IOP Publishing: Bristol, UK, 2021; Volume 1024, p. 012032. [Google Scholar]
- Chen, H.; Liu, Z. Application and Challenges of Signal Processing Techniques for Lamb Waves Structural Integrity Evaluation: Part B-Defects Imaging and Recognition Techniques. 2018. Available online: https://www.intechopen.com/chapters/62351 (accessed on 1 September 2018).
- Rose, J.L. Successes and Challenges in Ultrasonic Guided Waves for NDT and SHM. Available online: https://www.ndt.net/article/nde-india2009/pdf/1-PL-I.pdf (accessed on 16 February 2023).
- Lee, J.; Lee, S.J. Application of laser-generated guided wave for evaluation of corrosion in carbon steel pipe. NDT E Int. 2009, 42, 222–227. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, S.; Guan, X.; Jin, R. New Progress in Application of Laser Doppler Vibration Measurement Technology. Laser Optoelectron. Prog. 2022, 59, 1900006. [Google Scholar]
- Staszewski, W.J.; bin Jenal, R.; Klepka, A.; Szwedo, M.; Uhl, T. A review of laser Doppler vibrometry for structural health monitoring applications. Key Eng. Mater. 2012, 518, 1–15. [Google Scholar] [CrossRef]
- Mallet, L.; Lee, B.; Staszewski, W.; Scarpa, F. Structural health monitoring using scanning laser vibrometry: II. Lamb waves for damage detection. Smart Mater. Struct. 2004, 13, 261. [Google Scholar] [CrossRef]
- Ng, K.M.; Masurkar, F.; Peter, W.T.; Yelve, N.P. Design of a new optical system to generate narrowband guided waves with an application for evaluating the health status of rail material. Opt. Lett. 2019, 44, 5695–5698. [Google Scholar] [CrossRef]
- Sampath, S.; Sohn, H. Non-contact microcrack detection via nonlinear Lamb wave mixing and laser line arrays. Int. J. Mech. Sci. 2022, 237, 107769. [Google Scholar] [CrossRef]
- Davis, G.; Rajagopal, P.; Balasubramaniam, K.; Palanisamy, S.; Nagarajah, R. Laser Generation of Narrowband Lamb Waves for In-Situ Inspection of Additively Manufactured Metal Components; AIP Publishing: Long Island, NY, USA, 2019; Volume 2102, p. 070001. [Google Scholar]
- Davis, G.; Balasubramaniam, K.; Palanisamy, S.; Nagarajah, R.; Rajagopal, P. Additively manufactured integrated slit mask for laser ultrasonic guided wave inspection. Int. J. Adv. Manuf. Technol. 2020, 110, 1203–1217. [Google Scholar] [CrossRef]
- Ma, Z.; Yu, L. Lamb wave defect detection and evaluation using a fully non-contact laser system. In Proceedings of the Health Monitoring of Structural and Biological Systems XIII, Denver, CO, USA, 4–7 March 2019; SPIE: Bellingham, WA, USA, 2019; Volume 10972, pp. 422–430. [Google Scholar]
- Liu, Z.; Ma, C.; Chen, H.; Feng, X.; He, C.; Wu, B. Comparison of Imaging Quality of Compact Rectangular Arrays Based on Laser and Piezoelectric Transducers. J. Beijing Univ. Technol. 2018, 44, 1075–1081. [Google Scholar]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Yu, L. Noncontact/remote material characterization using ultrasonic guided wave methods. In Proceedings of the Smart Materials, Adaptive Structures and Intelligent Systems, Virtual, 15 September 2020; Volume 84027, p. V001T05A006. [Google Scholar]
- Selim, H.; Moctezuma, F.P.; Prieto, M.D.; Trull, J.F.; Martínez, L.R.; Cojocaru, C. Wavelet transform applied to internal defect detection by means of laser ultrasound. In Wavelet Transform and Complexity; IntechOpen: London, UK, 2019. [Google Scholar]
- Lee, J.R.; Chia, C.C.; Shin, H.J.; Park, C.Y.; Yoon, D.J. Laser ultrasonic propagation imaging method in the frequency domain based on wavelet transformation. Opt. Lasers Eng. 2011, 49, 167–175. [Google Scholar] [CrossRef]
- Ding, X.; Li, W.; Xiong, J.; Shen, Y.; Huang, W. A flexible laser ultrasound transducer for Lamb wave-based structural health monitoring. Smart Mater. Struct. 2020, 29, 075006. [Google Scholar] [CrossRef]
- Monchalin, J.P. Optical detection of ultrasound at a distance using a confocal Fabry-Perot interferometer. Appl. Phys. Lett. 1985, 47, 14–16. [Google Scholar] [CrossRef]
- Yi, Z.; Sanxing, L. Study of Lamb Wave Dispersion Characterization Using Multiplexed Two-Wave Mixing Interferometer. Laser Optoelectron. Prog. 2021, 58, 2319001. [Google Scholar]
- Chia, C.C.; Jeong, H.M.; Lee, J.R.; Park, G. Composite aircraft debonding visualization by laser ultrasonic scanning excitation and integrated piezoelectric sensing. Struct. Control. Health Monit. 2012, 19, 605–620. [Google Scholar] [CrossRef]
- Chia, C.C.; Jang, S.G.; Yoon, D.J. Structural damage identification based on laser ultrasonic propagation imaging technology. Proc. SPIE 2009, 7389, 576–584. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, C.; Ji, H.; Qiu, J. Damage visualization using laser-generated residual guided waves with optimization of laser scanning path. Mech. Syst. Signal Process. 2022, 166, 108463. [Google Scholar] [CrossRef]
- Xiao, W.; Yu, L. Thin-plate imaging inspection using scattered waves cross-correlation algorithm and non-contact air-coupled transducer. J. Nondestruct. Eval. Diagn. Progn. Eng. Syst. 2021, 4, 021004. [Google Scholar] [CrossRef]
- Dhital, D.; Lee, J.R.; Park, C.Y.; Flynn, E. Laser excitation and fully non-contact sensing ultrasonic propagation imaging system for damage evaluation. In Proceedings of the Industrial and Commercial Applications of Smart Structures Technologies 2012; SPIE: Bellingham, WA, USA, 2012; Volume 8343, pp. 79–92. [Google Scholar]
- Qing, X.; Li, W.; Wang, Y.; Sun, H. Piezoelectric transducer-based structural health monitoring for aircraft applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef] [PubMed]
- Song, P.; Liu, J.; Liu, L.; Wang, F.; Sun, X.; Liu, Z.; Xu, L. Contactless inspection of CFRP artificial disbonds using combined laser thermography and laser ultrasonics with optical microphone. Compos. Struct. 2022, 297, 115971. [Google Scholar] [CrossRef]
- Dhital, D.; Lee, J.R. A fully non-contact ultrasonic propagation imaging system for closed surface crack evaluation. Exp. Mech. 2012, 52, 1111–1122. [Google Scholar] [CrossRef]
- Park, B.; Sohn, H.; Malinowski, P.H.; Ostachowicz, W. Damage detection in composites by noncontact laser ultrasonic. In Proceedings of the EWSHM-7th European Workshop on Structural Health Monitoring, Nantes, Frances, 8–11 July 2014. [Google Scholar]
- Ruzzene, M. Frequency–wavenumber domain filtering for improved damage visualization. Smart Mater. Struct. 2007, 16, 2116. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Fei, Y.; Li, B.; Zhou, A.; Gorgin, R. Research on the fk Domain Multimodal Damage Detection Imaging Fusion Method in Metal Plate. Trans. Indian Inst. Met. 2022, 75, 2777–2786. [Google Scholar] [CrossRef]
- Michaels, T.E.; Ruzzene, M.; Michaels, J.E. Incident wave removal through frequency-wavenumber filtering of full wavefield data. Aip Conf. Proc. 2009, 1096, 604–611. [Google Scholar]
- Ma, Z.; Yu, L. Lamb wave imaging with actuator network for damage quantification in aluminum plate structures. J. Intell. Mater. Syst. Struct. 2021, 32, 182–195. [Google Scholar] [CrossRef]
- Jeon, J.; Jung, H.; Park, G.; Kang, T.; Han, S. Laser-Scanning Based Damage Visualization Using Phase-Arrayed Local Wave Field Measurements. Available online: https://www.ndt.net/article/apwshm2018/papers/186.pdf (accessed on 16 February 2023).
- Flynn, E.B.; Chong, S.Y.; Jarmer, G.J.; Lee, J.R. Structural imaging through local wavenumber estimation of guided waves. Ndt E Int. 2013, 59, 1–10. [Google Scholar] [CrossRef]
- Truong, T.C.; Lee, J.R. Thickness reconstruction of nuclear power plant pipes with flow-accelerated corrosion damage using laser ultrasonic wavenumber imaging. Struct. Health Monit. 2018, 17, 255–265. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L.; Leckey, C.; Seebo, J. Guided wave imaging for detection and evaluation of impact-induced delamination in composites. Smart Mater. Struct. 2015, 24, 105019. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, D.; Rui, X.; Wang, Z. Noncontact damage topography reconstruction by wavenumber domain analysis based on air-coupled ultrasound and full-field laser vibrometer. Sensors 2021, 21, 609. [Google Scholar] [CrossRef] [PubMed]
- Gao, T.; Liu, X.; Zhu, J.; Zhao, B.; Qing, X. Multi-frequency localized wave energy for delamination identification using laser ultrasonic guided wave. Ultrasonics 2021, 116, 106486. [Google Scholar] [CrossRef] [PubMed]
- Zhu, R.; Huang, G.; Yuan, F. Fast damage imaging using the time-reversal technique in the frequency–wavenumber domain. Smart Mater. Struct. 2013, 22, 075028. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Yu, L.; Joseph, R.; Giurgiutiu, V. Fatigue-crack detection and monitoring through the scattered-wave two-dimensional cross-correlation imaging method using piezoelectric transducers. Sensors 2020, 20, 3035. [Google Scholar] [CrossRef]
- He, J.; Yuan, F.G. A quantitative damage imaging technique based on enhanced CCRTM for composite plates using 2D scan. Smart Mater. Struct. 2016, 25, 105022. [Google Scholar] [CrossRef]
- He, J.; Yuan, F.G. Lamb wave-based BVID imaging for a curved composite sandwich panel. Aip Conf. Proc. 2017, 1806, 050012. [Google Scholar]
- An, Y.K.; Park, B.; Sohn, H. Complete noncontact laser ultrasonic imaging for automated crack visualization in a plate. Smart Mater. Struct. 2013, 22, 025022. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Ji, H.; Qiu, J.; Wu, Y. Research on Interference Energy Calculation Method inLaser Ultrasonic Technique. Acta Opt. Sin. 2014, 34, 0714001. [Google Scholar] [CrossRef]
- Chia, C.C.; Lee, J.R.; Park, C.Y. Radome health management based on synthesized impact detection, laser ultrasonic spectral imaging, and wavelet-transformed ultrasonic propagation imaging methods. Compos. Part B Eng. 2012, 43, 2898–2906. [Google Scholar] [CrossRef]
- Lissenden, C.J. Nonlinear ultrasonic guided waves—Principles for nondestructive evaluation. J. Appl. Phys. 2021, 129, 021101. [Google Scholar] [CrossRef]
- Shen, Y.; Cen, M.; Xu, W. Scanning laser vibrometry imaging of fatigue cracks via nonlinear ultrasonic guided wave scattering and mode conversion. In Proceedings of the Health Monitoring of Structural and Biological Systems XIII; SPIE: Bellingham, WA, USA, 2019; Volume 10972, pp. 322–328. [Google Scholar]
- Shen, Y.; Cen, M. Delamination Detection in Composite Plates Using Linear and Nonlinear Ultrasonic Guided Waves. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11–14 November 2019; Volume 59469, p. V009T11A024. [Google Scholar]
- Balasubramaniam, K.; Sikdar, S.; Fiborek, P.; Malinowski, P.H. Ultrasonic guided wave signal based nondestructive testing of a bonded composite structure using piezoelectric transducers. Signals 2021, 2, 13–24. [Google Scholar] [CrossRef]
- Yao, C.; Chen, H.; Li, L. NDT Method for Thin Plate Damage Based on Laser Vibrometer. Nondestruct. Test. 2017, 39, 5–8. [Google Scholar]
- Han, W.; Feng, K.; Yang, H. Phase Reversal Method for Damage Imaging in Composite Laminates Based on Data Fusion. Appl. Sci. 2022, 12, 2894. [Google Scholar] [CrossRef]
- Di Ianni, T.; De Marchi, L.; Perelli, A.; Marzani, A. Compressive sensing of full wave field data for structural health monitoring applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1373–1383. [Google Scholar] [CrossRef] [PubMed]
- Sabeti, S.; Harley, J.B. Spatio-temporal undersampling: Recovering ultrasonic guided wavefields from incomplete data with compressive sensing. Mech. Syst. Signal Process. 2020, 140, 106694. [Google Scholar] [CrossRef]
- Esfandabadi, Y.K.; De Marchi, L.; Testoni, N.; Marzani, A.; Masetti, G. Full wavefield analysis and damage imaging through compressive sensing in lamb wave inspections. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2017, 65, 269–280. [Google Scholar] [CrossRef]
- Mesnil, O.; Ruzzene, M. Sparse wavefield reconstruction and source detection using compressed sensing. Ultrasonics 2016, 67, 94–104. [Google Scholar] [CrossRef]
- Li, P.; Lu, Y.; Xu, C. Lamb wavefield reconstruction and damage imaging of composite plate based on compressed sensing. Acta Mater. Compos. Sin. 2021, 38, 1–12. [Google Scholar]
- Gao, F.; Hua, J.; Zeng, L.; Lin, J. Amplitude modified sparse imaging for damage detection in quasi-isotropic composite laminates using non-contact laser induced Lamb waves. Ultrasonics 2019, 93, 122–129. [Google Scholar] [CrossRef] [PubMed]
- Ambroziński, Ł. Beamforming of guided waves. Adv. Struct. Damage Detect. Theory Eng. Appl. 2013, 7, 177–211. [Google Scholar]
- Chen, H.; Xu, K.; Liu, Z.; Ta, D. Sign coherence factor-based search algorithm for defect localization with laser generated Lamb waves. Mech. Syst. Signal Process. 2022, 173, 109010. [Google Scholar] [CrossRef]
- Li, F.; Luo, Y. Damage Imaging of Lamb Wave in Isotropic Plate Using Phased Array Delay and Sum Based on Frequency-domain Inverse Scattering Model. Nondestruct. Test. Eval. 2022, 37, 721–736. [Google Scholar] [CrossRef]
- Tian, Z.; Howden, S.; Ma, Z.; Xiao, W.; Yu, L. Pulsed laser-scanning laser Doppler vibrometer (PL-SLDV) phased arrays for damage detection in aluminum plates. Mech. Syst. Signal Process. 2019, 121, 158–170. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Phased array techniques for damage detection in aerospace structures. In Structural Health Monitoring (SHM) in Aerospace Structures; Elsevier: Amsterdam, The Netherlands, 2016; pp. 285–306. [Google Scholar]
- Ambroziński, Ł.; Stepinski, T.; Uhl, T. Efficient tool for designing 2D phased arrays in lamb waves imaging of isotropic structures. J. Intell. Mater. Syst. Struct. 2015, 26, 2283–2294. [Google Scholar] [CrossRef]
- Ambrozinski, L.; Packo, P.; Stepinski, T.; Uhl, T. Experimental comparison of 2D arrays topologies for SHM of planar structures. In Proceedings of the Nondestructive Characterization for Composite Materials, Aerospace Engineering, Civil Infrastructure, and Homeland Security 2012; SPIE: Bellingham, WA, USA, 2012; Volume 8347, pp. 271–277. [Google Scholar]
- Li, F.; Luo, Y. Total Focusing Method Damage Imaging in Frequency Domain Using Laser-Ultrasonic Lamb Wave Based on Time-domain Filtering in Multi-band. Acta Mech. Solida Sin. 2021, 34, 404–424. [Google Scholar] [CrossRef]
- Tian, Z.; Ma, Z.; Xiao, W.; Yu, L. Noncontact laser vibrometry-based fence-like arrays with wavefield filtering-assisted adaptive imaging algorithms for detecting multiple pits in a compact cluster. Struct. Health Monit. 2020, 20, 2813–2827. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.; Sun, K.; He, C.; Wu, B. Full non-contact laser-based Lamb waves phased array inspection of aluminum plate. J. Vis. 2018, 21, 751–761. [Google Scholar] [CrossRef]
- Yang, H.; Lee, Y.J.; Lee, S.K. Impact source localization in plate utilizing multiple signal classification. Proc. Inst. Mech. Eng Part C J. Mech. Eng. Sci. 2013, 227, 703–713. [Google Scholar] [CrossRef]
- Yuan, S.; Zhong, Y.; Qiu, L.; Wang, Z. Two-dimensional near-field multiple signal classification algorithm–based impact localization. J. Intell. Mater. Syst. Struct. 2015, 26, 400–413. [Google Scholar] [CrossRef]
- Zhong, Y.; Yuan, S.; Qiu, L. Multiple damage detection on aircraft composite structures using near-field MUSIC algorithm. Sensors Actuators A Phys. 2014, 214, 234–244. [Google Scholar] [CrossRef]
- Han, J.H.; Kim, Y.J. Time–frequency beamforming for nondestructive evaluations of plate using ultrasonic Lamb wave. Mech. Syst. Signal Process. 2015, 54, 336–356. [Google Scholar] [CrossRef]
- Liu, Z.H.; Su, R.X.; Zhang, T.T.; Yu, G.; He, C.F.; Wu, B. Full laser-based Lamb waves array imaging based on the two-dimensional multiple signal classification algorithm. In Proceedings of the 2020 IEEE Far East NDT New Technology & Application Forum (FENDT), Kunming, China, 20–22 November 2020; pp. 169–173. [Google Scholar]
- Zhong, Y.; Yuan, S.; Qiu, L. Omni-directional impact localization method on composite structure using plum blossom array. Acta Mater. Compos. Sin. 2014, 1369–1374. [Google Scholar]
- Bao, Q.; Yuan, S.; Guo, F.; Qiu, L. Transmitter beamforming and weighted image fusion–based multiple signal classification algorithm for corrosion monitoring. Struct. Health Monit. 2019, 18, 621–634. [Google Scholar] [CrossRef]
- Fu, T.; Wang, Y.; Qiu, L.; Tian, X. Sector piezoelectric sensor array transmitter beamforming MUSIC algorithm based structure damage imaging method. Sensors 2020, 20, 1265. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Wang, K.; Zhou, P.; Xu, L.; Liu, J.; Sun, P.; Su, Z. Ameliorated-multiple signal classification (Am-MUSIC) for damage imaging using a sparse sensor network. Mech. Syst. Signal Process. 2022, 163, 108154. [Google Scholar] [CrossRef]
- Yuan, S.; Bao, Q.; Qiu, L.; Zhong, Y. A single frequency component-based re-estimated MUSIC algorithm for impact localization on complex composite structures. Smart Mater. Struct. 2015, 24, 105021. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, A.; Sun, H.; Yun, F. A local TR-MUSIC algorithm for damage imaging of aircraft structures. Sensors 2021, 21, 3334. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Yuan, F.G. Lamb wave-based subwavelength damage imaging using the DORT-MUSIC technique in metallic plates. Struct. Health Monit. 2016, 15, 65–80. [Google Scholar] [CrossRef]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Hua, J.; Cao, X.; Yi, Y.; Lin, J. Time-frequency damage index of Broadband Lamb wave for corrosion inspection. J. Sound Vib. 2020, 464, 114985. [Google Scholar] [CrossRef]
- Hua, J.; Lin, J.; Zeng, L. High-resolution damage detection based on local signal difference coefficient model. Struct. Health Monit. 2015, 14, 20–34. [Google Scholar] [CrossRef]
- Zielińska, M.; Rucka, M. Imaging of increasing damage in steel plates using Lamb waves and ultrasound computed tomography. Materials 2021, 14, 5114. [Google Scholar] [CrossRef]
- Hutchins, D.; Jansen, D.; Edwards, C. Lamb-wave tomography using non-contact transduction. Ultrasonics 1993, 31, 97–103. [Google Scholar] [CrossRef]
- Belanger, P.; Cawley, P. Feasibility of low frequency straight-ray guided wave tomography. NDT E Int. 2009, 42, 113–119. [Google Scholar] [CrossRef]
- Sheen, B.; Cho, Y. A study on quantitative lamb wave tomogram via modified RAPID algorithm with shape factor optimization. Int. J. Precis. Eng. Manuf. 2012, 13, 671–677. [Google Scholar] [CrossRef]
- Nagata, Y.; Huang, J.; Achenbach, J.; Krishnaswamy, S. Lamb wave tomography using laser-based ultrasonics. In Review of Progress in Quantitative Nondestructive Evaluation; Springer: Berlin/Heidelberg, Germany, 1995; pp. 561–568. [Google Scholar]
- Liu, Y.; Zhou, S.; Ning, H.; Yan, C.; Hu, N. An inverse approach of damage identification using lamb wave tomography. Sensors 2019, 19, 2180. [Google Scholar] [CrossRef] [Green Version]
- Albiruni, F.; Cho, Y.; Lee, J.H.; Ahn, B.Y. Non-contact guided waves tomographic imaging of plate-like structures using a probabilistic algorithm. Mater. Trans. 2012, 53, 330–336. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Lee, J.; Le, Z.; Cho, Y. High-precision noncontact guided wave tomographic imaging of plate structures using a DHB algorithm. Appl. Sci. 2020, 10, 4360. [Google Scholar] [CrossRef]
- Hu, B.; Hu, N.; Li, L.; Li, W.; Tang, S.; Li, Y.; Peng, X.; Homma, A.; Liu, Y.; Wu, L.; et al. Tomographic reconstruction of damage images in hollow cylinders using Lamb waves. Ultrasonics 2014, 54, 2015–2023. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.Y.; Ruan, M.; Zhu, W.F.; Chai, X.D. Quantitative damage imaging using Lamb wave diffraction tomography. Chin. Phys. B 2016, 25, 124304. [Google Scholar] [CrossRef]
- Chen, X.; Michaels, J.; Michaels, T. A Methodology for Estimating Guided Wave Scattering Patterns From Sparse Transducer Array Measurements. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2015, 62, 208–219. [Google Scholar] [CrossRef]
- Zhang, J.; Drinkwater, B.; Wilcox, P. Defect characterization using an ultrasonic array to measure the scattering coefficient matrix. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 2254–2265. [Google Scholar] [CrossRef] [PubMed]
- Huthwaite, P.; Simonetti, F. High-resolution guided wave tomography. Wave Motion 2013, 50, 979–993. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Guided wave tomography based on full waveform inversion. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 737–745. [Google Scholar] [CrossRef]
- He, J.; Rocha, D.C.; Sava, P. Guided wave tomography based on least-squares reverse-time migration. Struct. Health Monit. 2020, 19, 1237–1249. [Google Scholar] [CrossRef]
- Schnur, C.; Goodarzi, P.; Lugovtsova, Y.; Bulling, J.; Prager, J.; Tschöke, K.; Moll, J.; Schütze, A.; Schneider, T. Towards Interpretable Machine Learning for Automated Damage Detection Based on Ultrasonic Guided Waves. Sensors 2022, 22, 406. [Google Scholar] [CrossRef]
- Harley, J.; Sparkman, D. Machine Learning and NDE: Past, Present, and Future; AIP Publishing LLC: Long Island, NY, USA, 2019; Volume 2102, p. 090001. [Google Scholar] [CrossRef]
- Melville, J.; Supreet, A.K.; Deemer, C.; Harley, J. Structural Damage Detection Using Deep Learning of Ultrasonic Guided Waves; AIP Publishing LLC: Long Island, NY, USA, 2017; Volume 1949. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, H.; Wang, X.; Lin, Z. Machine Learning-Enriched Lamb Wave Approaches for Automated Damage Detection. Sensors 2020, 20, 1790. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Li, C.M.; Ye, W. Damage localization in plate-like structures using time-varying feature and one-dimensional convolutional neural network. Mech. Syst. Signal Process. 2021, 147, 107107. [Google Scholar] [CrossRef]
- Miorelli, R.; Fisher, C.; Kulakovskyi, A.; Chapuis, B.; Mesnil, O.; D’Almeida, O. Defect sizing in guided wave imaging structural health monitoring using convolutional neural networks. NDT E Int. 2021, 122, 102480. [Google Scholar] [CrossRef]
- Liu, B.; Tang, L.; Wang, J.; Li, A.; Hao, Y. 2-D defect profile reconstruction from ultrasonic guided wave signals based on QGA-kernelized ELM. Neurocomputing 2014, 128, 217–223. [Google Scholar] [CrossRef]
- Cui, R.; Azuara, G.; Scalea, F.; Barrera, E. Damage imaging in skin-stringer composite aircraft panel by ultrasonic-guided waves using deep learning with convolutional neural network. Struct. Health Monit. 2021, 21, 147592172110239. [Google Scholar] [CrossRef]
- Roy, S.K.; Chang, F.; Lee, S.J.; Pollock, P.; Janapati, V. A novel machine-learning approach for structural state identification using ultrasonic guided waves. In Safety, Reliability, Risk and Life-Cycle Performance of Structures and Infrastructures; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Sattarifar, A.; Nestorović, T. Emergence of Machine Learning Techniques in Ultrasonic Guided Wave-based Structural Health Monitoring: A Narrative Review. Int. J. Progn. Health Manag. 2022, 13. [Google Scholar] [CrossRef]
- Rautela, M.; Gopalakrishnan, S. Ultrasonic guided wave based structural damage detection and localization using model assisted convolutional and recurrent neural networks. Expert Syst. Appl. 2021, 167, 114189. [Google Scholar] [CrossRef]
- Zhixiang, X.; Shouyan, G.; Fan, Y.; Lianfu, L. Laser ultrasonic surface defects detection method based on 2D-CNN. J. Appl. Opt. 2021, 42, 149–156. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, Z.; Wang, L.; Zhou, T.; Chen, J.; Zhu, Z.; Sui, H.; Zhu, H.; Li, G. Effective detection of metal surface defects based on double-line laser ultrasonic with convolutional neural networks. Mod. Phys. Lett. B 2021, 35, 2150263. [Google Scholar] [CrossRef]
- Guo, S.; Feng, H.; Feng, W.; Lv, G.; Chen, D.; Liu, Y.; Wu, X. Automatic Quantification of Subsurface Defects by Analyzing Laser Ultrasonic Signals Using Convolutional Neural Networks and Wavelet Transform. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2021, 68, 3216–3225. [Google Scholar] [CrossRef]
- Song, H.; Yang, Y. Super-resolution visualization of subwavelength defects via deep learning-enhanced ultrasonic beamforming: A proof-of- principle study. NDT E Int. 2020, 116, 102344. [Google Scholar] [CrossRef]
- Song, H.; Yang, Y. Noncontact super-resolution guided wave array imaging of subwavelength defects using a multiscale deep learning approach. Struct. Health Monit. 2020, 20, 147592172094295. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L.; Leckey, C. Rapid guided wave delamination detection and quantification in composites using global-local sensing. Smart Mater. Struct. 2016, 25, 085042. [Google Scholar] [CrossRef]
- Song, H.; Yang, Y. Accelerated noncontact guided wave array imaging via sparse array data reconstruction. Ultrasonics 2022, 121, 106672. [Google Scholar] [CrossRef] [PubMed]
- Spytek, J.; Mrówka, J.; Pieczonka, L.; Ambroziński, L. Multi-resolution non-contact damage detection in complex-shaped composite laminates using ultrasound. NDT E Int. 2020, 116, 102366. [Google Scholar] [CrossRef]
- Rautela, M.; Senthilnath, J.; Moll, J.; Gopalakrishnan, S. Combined two-level damage identification strategy using ultrasonic guided waves and physical knowledge assisted machine learning. Ultrasonics 2021, 115, 106451. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.J.; Hong, S.C.; Lee, J.R.; Hong, S.J. Corner inspection method for L-shaped composite structures using laser ultrasonic rotational scanning technique. Adv. Compos. Mater. 2021, 30, 431–442. [Google Scholar] [CrossRef]
- Lee, Y.J.; Lee, J.R.; Ihn, J.B. Composite repair patch evaluation using pulse-echo laser ultrasonic correlation mapping method. Compos. Struct. 2018, 204, 395–401. [Google Scholar] [CrossRef]
- Zhang, K.; Li, S.; Zhou, Z. Detection of disbonds in multi-layer bonded structures using the laser ultrasonic pulse-echo mode. Ultrasonics 2019, 94, 411–418. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Specimen | Damage Type and Size | Damage Information | Ref |
|---|---|---|---|---|
| WFA | Aluminum plate 1.27 mm | Narrow grooves 12.7 × 1.27 × 0.76 mm | Location | [52] |
| Aluminum 1 mm | Triangular groove × 1/Letters bonded onto the surface × 3 10 mm/“USC” 18 × 20 mm | Location/Size/Shape | [53] | |
| Aluminum plate 6 mm | Corrosion × 4 30 × 30 mm | Location | [54] | |
| LWE | CFRP 1 mm | Impact-induced delamination 32.3 × 22.6 mm | Location/Size/Shape 30 × 20 mm | [57] |
| Aluminum/CFRP plate 2 mm | Cut grooves 10 × 10 × 1/1.5 mm 20 × 20 × 1/1.5 mm | Location/Size/Shape | [58] | |
| Al/Al bonding plate 0.5/0.5 mm 0.5/1 mm | Delamination 30 mm | Location/Size/Shape | [59] | |
| AWPI | CFRP composite wing 2.2 mm | Impact × 2 15.5 × 15.5 mm 26.6 × 22.9 mm | Location/Size 15.5 × 13.6 mm 21.7 × 19.8 mm | [1] |
| Al-alloy tank liner 1.75–2.3 mm | Crack 11 mm | Location/Length 11 mm | [4] | |
| CCI | Aluminum/Stainless- steel specimen 1 mm | Fatigue crack 5/10/30 mm | Location /Length 5.2/10.1/31 mm | [61] |
| Stainless-steel plate 0.5 mm | Notches 40/60/90deg 10/3 × 2 × 0.25/0.1 mm | Orientation/Size | [44] | |
| CFRP plate 2.28 mm | Impact 17 × 22 mm | Location/Size | [62] | |
| CSWE | Aluminum plate 4 mm | Notch 20 × 2 × 3 mm | Location/Length | [65] |
| Aluminum plate 6 mm | Notch 20 × 2 × 3 mm | Location/Length 1.5 × 18 mm | [64] | |
| UFT | CFRP radome 0.5 mm | Hidden circular impact 25 mm | Location/Size | [66] |
| Aluminum plate 0.5 mm | Artificial/Closed crack 10 × 1 × 1 mm | Location/Length | [48] | |
| NUT | Aluminum plate 0.5 mm | Crack 10 mm × 10 m | Location/Size | [14] |
| Aluminum plate 1 mm | Microcrack 1.36 m | Location/Size | [29] | |
| two 2 mm thick quasi- isotropic CFRP plate bonded together | Delamination 20 mm | None | [69] |
| Methods | Detectable Information | Advantages | Disadvantages |
|---|---|---|---|
| LWE | Shape Depth | Enables high resolution imaging for damage detail | Sensitive to damage in the thickness direction only |
| AWPI | Size | Real-time detection with no conversion between spectral domains | Additional processing steps required in pre and post |
| CCI | Orientation Size | Automatic dispersion compensation | High calculation volume and low efficiency |
| CSWE | Size | Simple imaging principle | Highly influenced by standing waves, only centimetre-level resolution achieved |
| UFT | Size | Simple calculation, real-time detection, no conversion between spectral domains | Need to find the optimal damage correlation frequency |
| NUT | Size | Identification of pores or early sprouting microdamage | Special equipment is required to excite narrowband ultrasound |
| Methods | Specimen | Damage Type and Size | Damage Information | Ref |
|---|---|---|---|---|
| GPM | Wind turbine composite blade 3 mm | Delamination 10 mm | Location Error = 5.4 mm | [49] |
| Aluminum Nomex sandwich core structure 1 mm | BVID(Impact damage)/hole 14/18/5 mm | Location | [70] | |
| Aluminum plate 1 mm | Rectangular through-hole damage 12 × 3 mm | Location | [71] | |
| Composite plate 1 mm | Through hole 10 mm | Location | [72] | |
| CS | GFRP 1.6 mm | Delamination 25.4 mm between layer 2/3 | Location/Size/Shape Compression ratios = 90% | [76] |
| CFRP 1.6 mm | A circular magnet 10 mm | Location Compression ratios = 86% Error <2/3 | [77] | |
| GFRP/CFRP plates 3.2/0.5 mm | Notch cut/Delamination 15 × 0.5 mm/10 mm | Location/Size | [75] | |
| CFRP plate 2 mm | A square magnet 10 × 10 mm | Location | [78] | |
| PAI | Aluminum plate 1 mm | Quartz rod × 4/Crack × 2 4/6/8/10 mm 10 mm | Location/Orientation | [82] |
| Aluminum plate 0.8 mm | Circular magnet/Through hole 25/20 mm 5 mm | Location/Size | [88] | |
| Aluminum plate 3.2 mm | Pitting corrosion cluster (3 × 3) 2 mm Interval:2 mm | Location/Size Except the center one | [87] | |
| MUSIC | Aluminum plate 0.8mm | Through hole 10/20/30mm | Location | [93] |
| Aluminum plate 2 mm | Two drilled holes 4 mm | Direction of Arrival | [99] | |
| T6061 aluminum plate 1.6 mm | Circular magnetic 6.35 mm | Location | [100] | |
| LWT | Aluminum plate 3 mm | A round corrosion wastage Corrosion pits cluster 106 × 30 × 1 mm 32 × 100 × 1.5 mm | Location /Size | [110] |
| Aluminum plate 1 mm | Rectangle/circle/microhole/strip 52 × 26/52/4/52 × 2 mm | Location/Size/Shape | [111] | |
| Aluminum plate 10 mm | Flat-bottom defects × 3 60 × 44 × 5 mm 42 × 30 × 4 mm 24 × 16 × 3 mm | Location/Size/Shape | [117] | |
| Aluminum alloy plate 2.29 mm | Rectangular/Complex shaped/ Multiple, varying-sized damage | Location/Size/Shape | [118] | |
| ML | Aluminum alloy plate 1.6 mm | Crack-like defect 9.4 × 2 × 1.6 mm | Location /Size/Shape/ Orientation | [134] |
| Aluminum alloy plate 1.6 mm | various subwavelength circular and notch-type defects 3/10/12/18 mm | Location /Size/Shape/ Orientation | [133] | |
| Aluminum plate 0.8 mm | Circular magnetic × 2 25 mm | Location | [80] |
| Methods | Checkable Information | Advantages | Disadvantages | |
|---|---|---|---|---|
| GPM | Location | Simple principle, fast positioning | Accuracy affected by dispersion | |
| CS | Location | Breaks the Nyquist sampling limit | The construction of dictionary library has a great impact on the results | |
| PAI | Location | Simple principle with little data collection | Extremely inefficient point-by- point assignment calculations | |
| MUSIC | Location | Fast calculation and high resolution in orientation | Low SNR and dispersion result in low radial resolution | |
| LWT | Location Shape | High resolution | Multi-transmission and multi-receiving, low efficiency in acquisition | |
| ML | Location Shape | Fast classification/localisation, high accuracy quantification | Requires large amount of training data, poor physical interpretability | |
| Step 1 | Result from Step 1 | Step 2 | Result from Step 2 | Ref. |
|---|---|---|---|---|
| PAI | Rough location | LWE | High-precision imaging | [135] |
| CS | Reconstruction of partial wave fields | PAI | Location | [136] |
| LWE | Damage imaging | Pulse echo method(body wave) | High-precision imaging | [137] |
| DL-CNN1 | With or without damage | DL-CNN2 | Location | [138] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, S.; Luo, Y.; Xu, C.; Xu, G. A Review of Laser Ultrasonic Lamb Wave Damage Detection Methods for Thin-Walled Structures. Sensors 2023, 23, 3183. https://doi.org/10.3390/s23063183
Zheng S, Luo Y, Xu C, Xu G. A Review of Laser Ultrasonic Lamb Wave Damage Detection Methods for Thin-Walled Structures. Sensors. 2023; 23(6):3183. https://doi.org/10.3390/s23063183
Chicago/Turabian StyleZheng, Shanpu, Ying Luo, Chenguang Xu, and Guidong Xu. 2023. "A Review of Laser Ultrasonic Lamb Wave Damage Detection Methods for Thin-Walled Structures" Sensors 23, no. 6: 3183. https://doi.org/10.3390/s23063183