

Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software

Abstract
:
1. Introduction
2. Materials and Methods
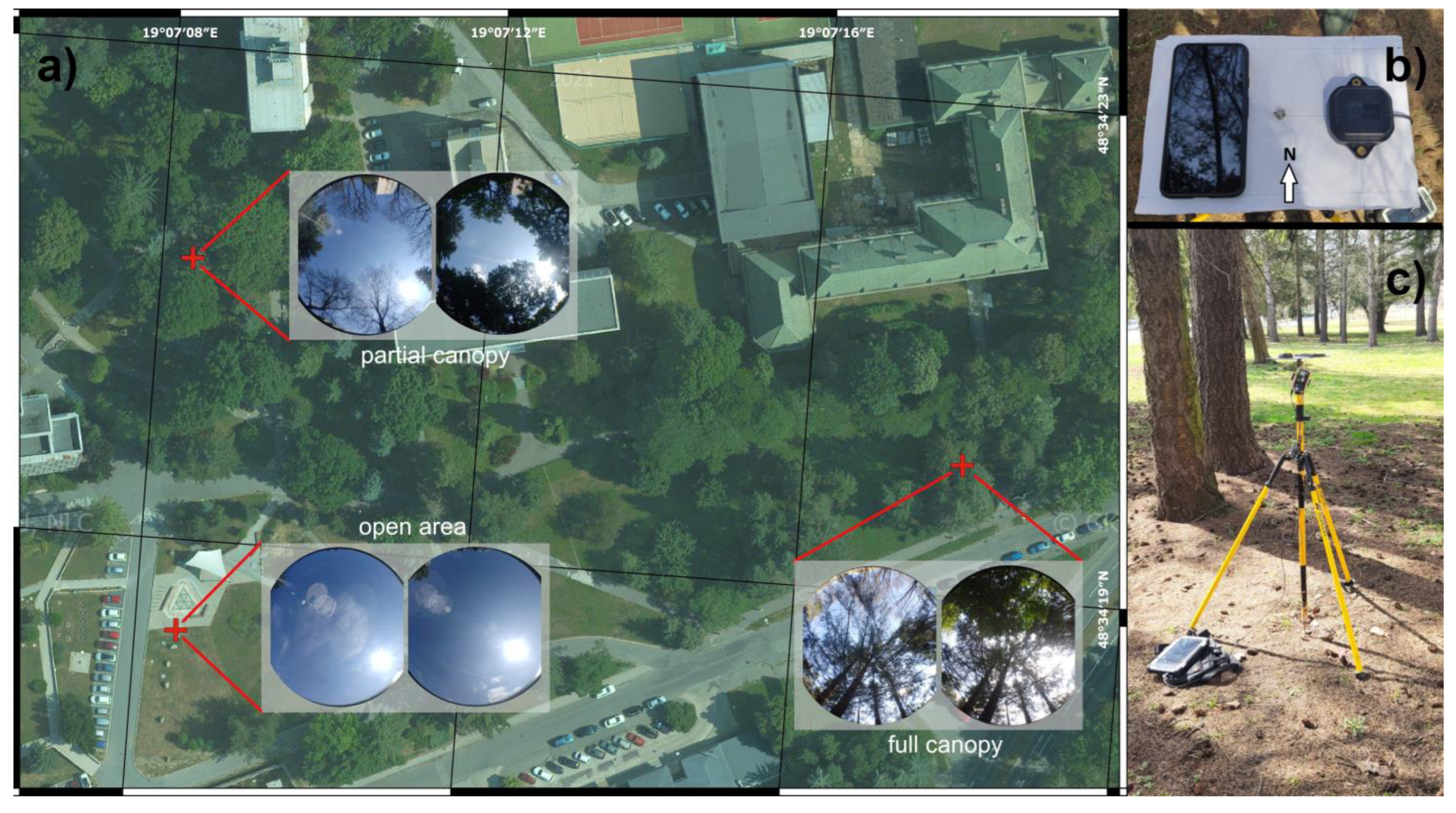
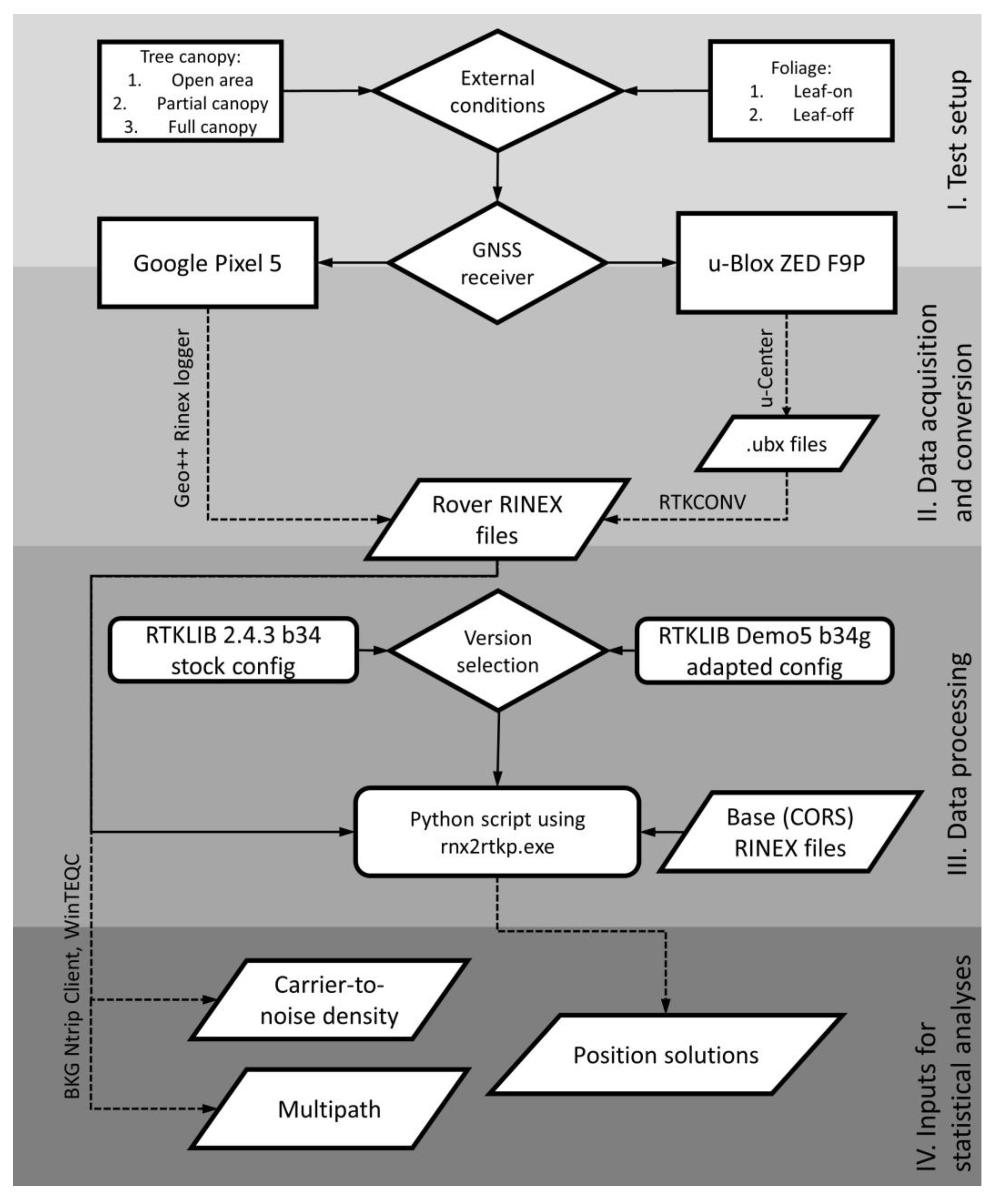
2.1. Data Acquisition
2.2. Data Processing and Evaluation
- Applied device (Google Pixel 5, u-Blox ZED F9P application board)
- State of vegetation (leaf-on, leaf-off)
- Level of canopy cover (open area, partial canopy, full canopy)
- Software and configuration file versions (RTKLIB 2.4.3. b34 with stock configuration file and Demo5 b34g with adapted configuration file)
2.3. Adaptation of RTKLIB Code and Configuration
3. Results
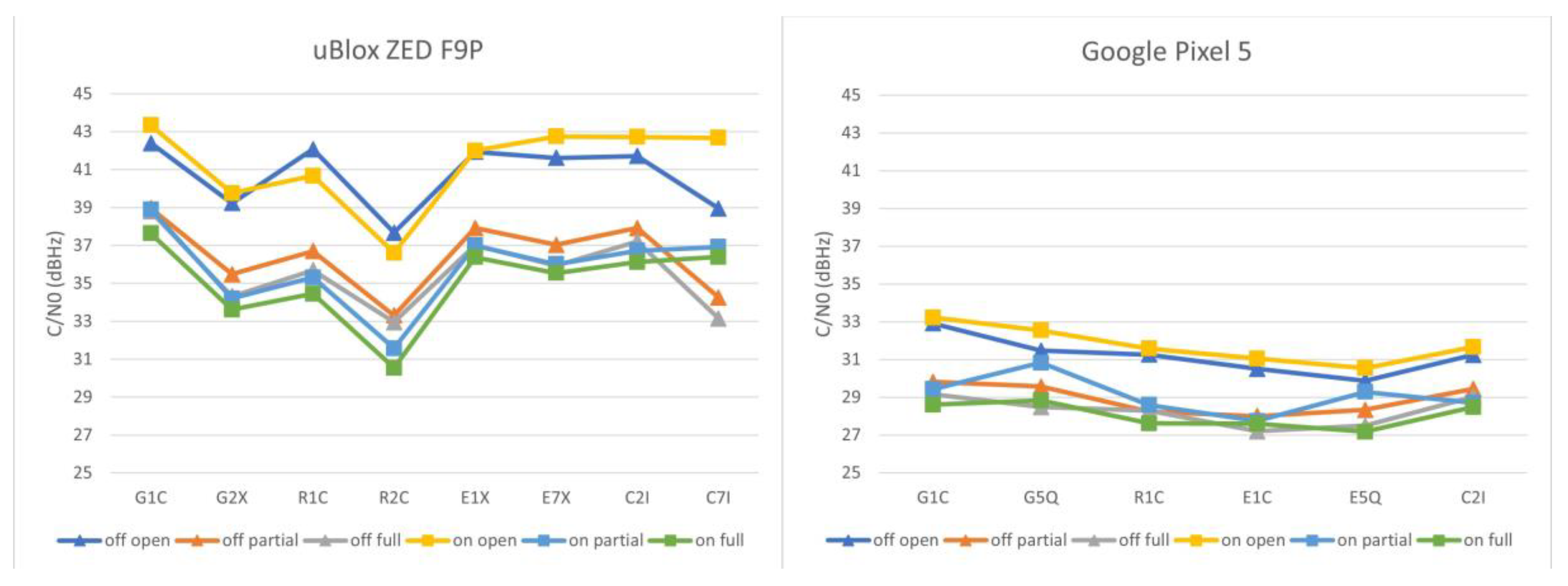
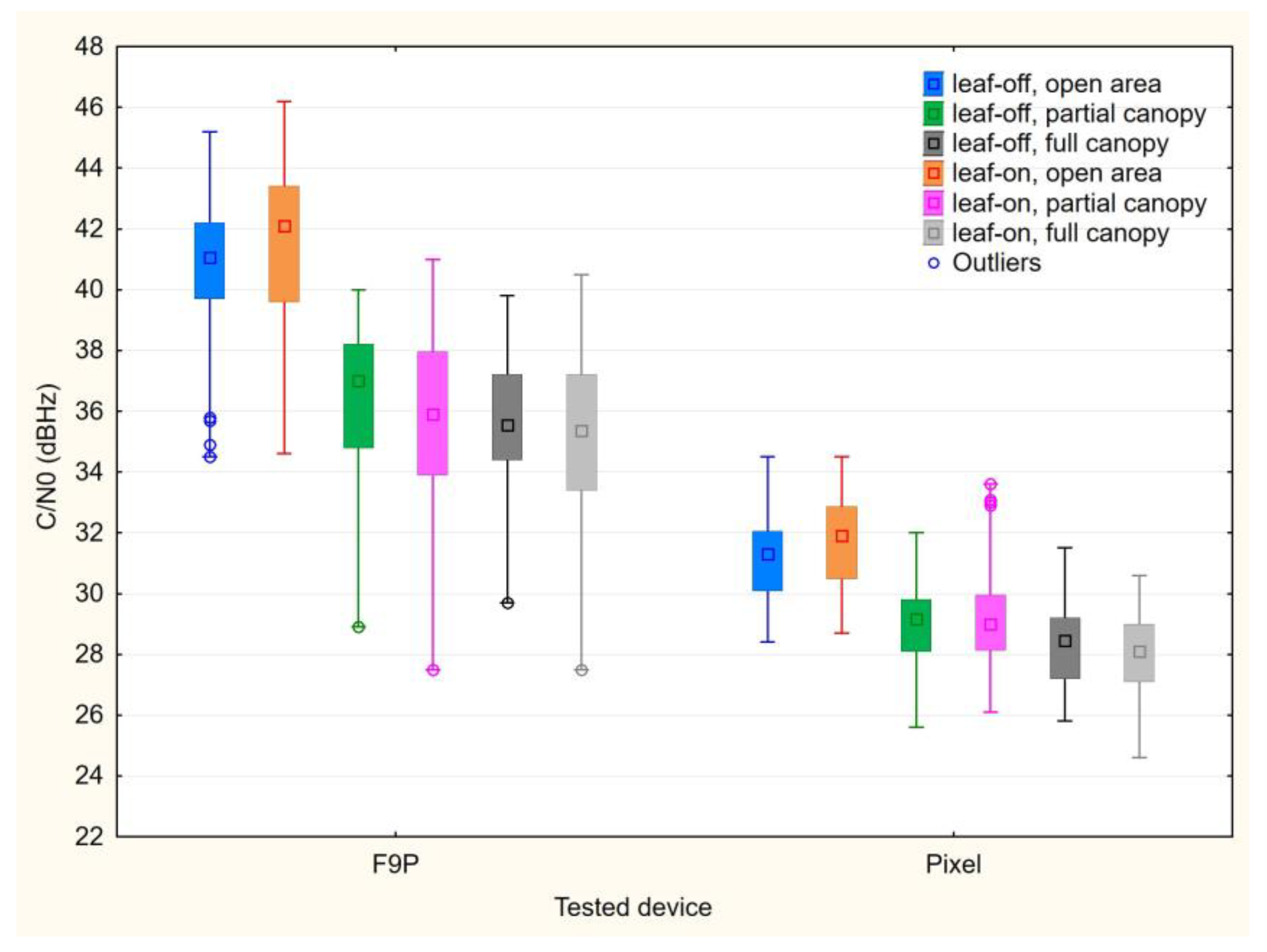
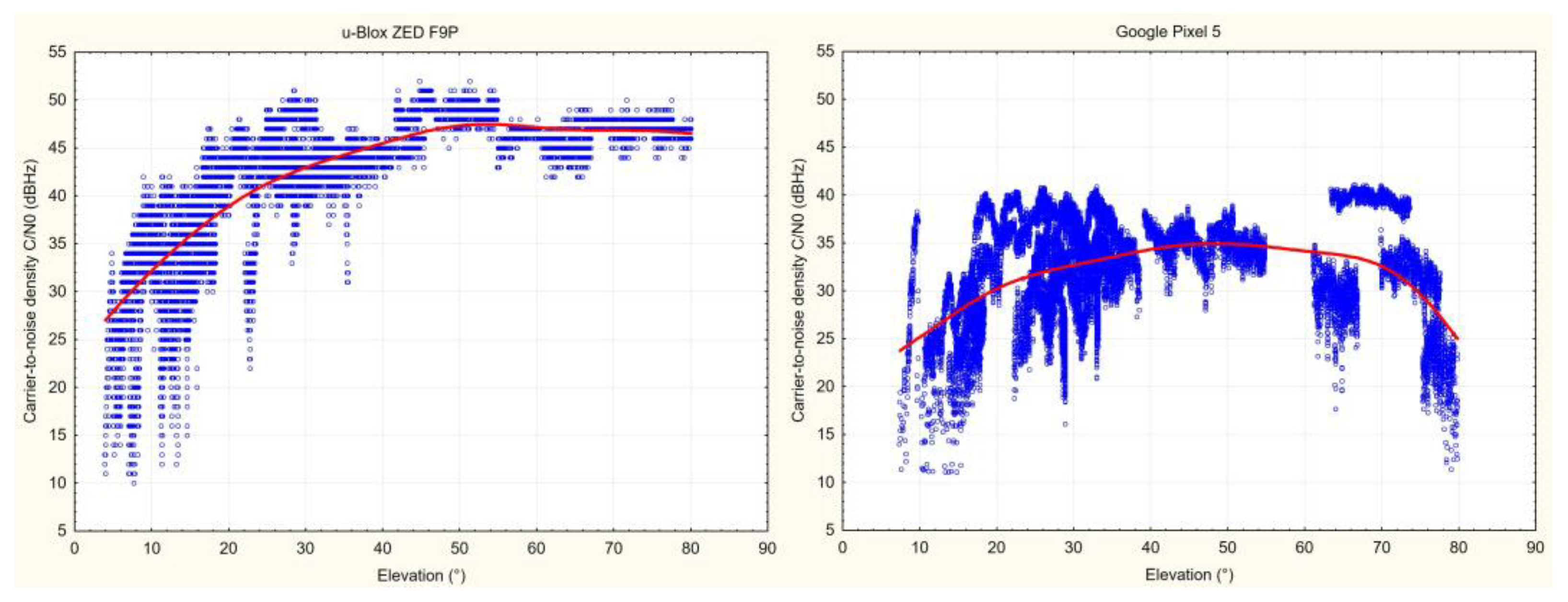
3.1. Carrier-to-Noise Density
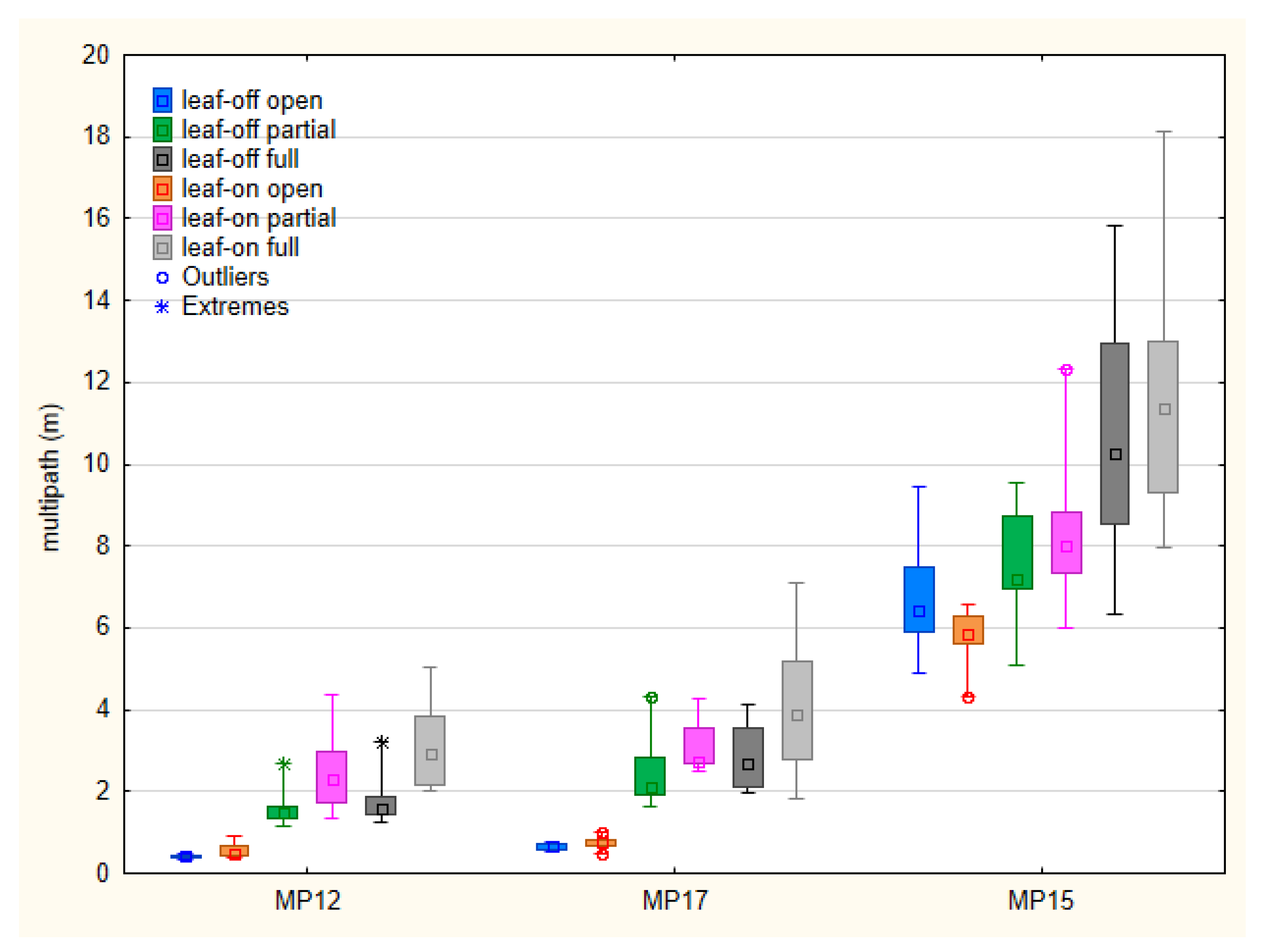
3.2. Multipath
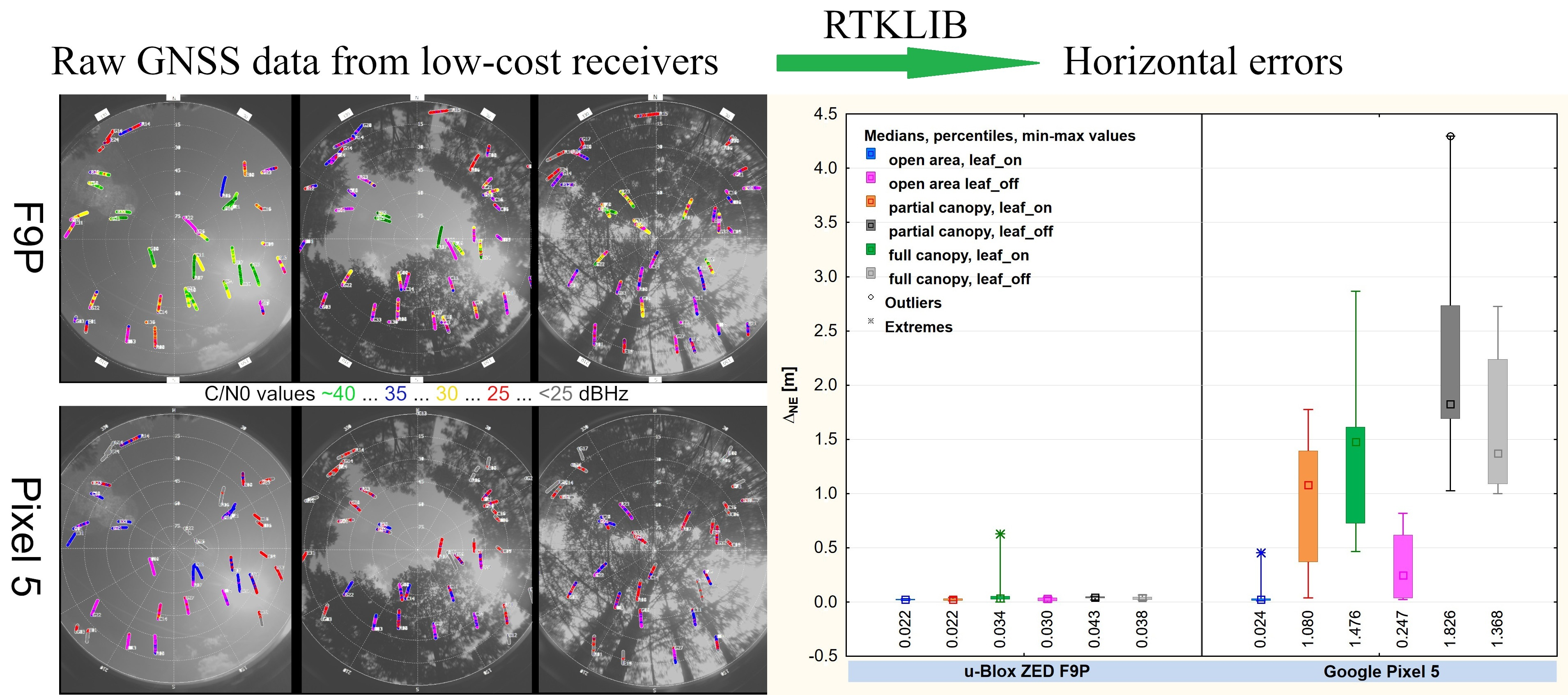
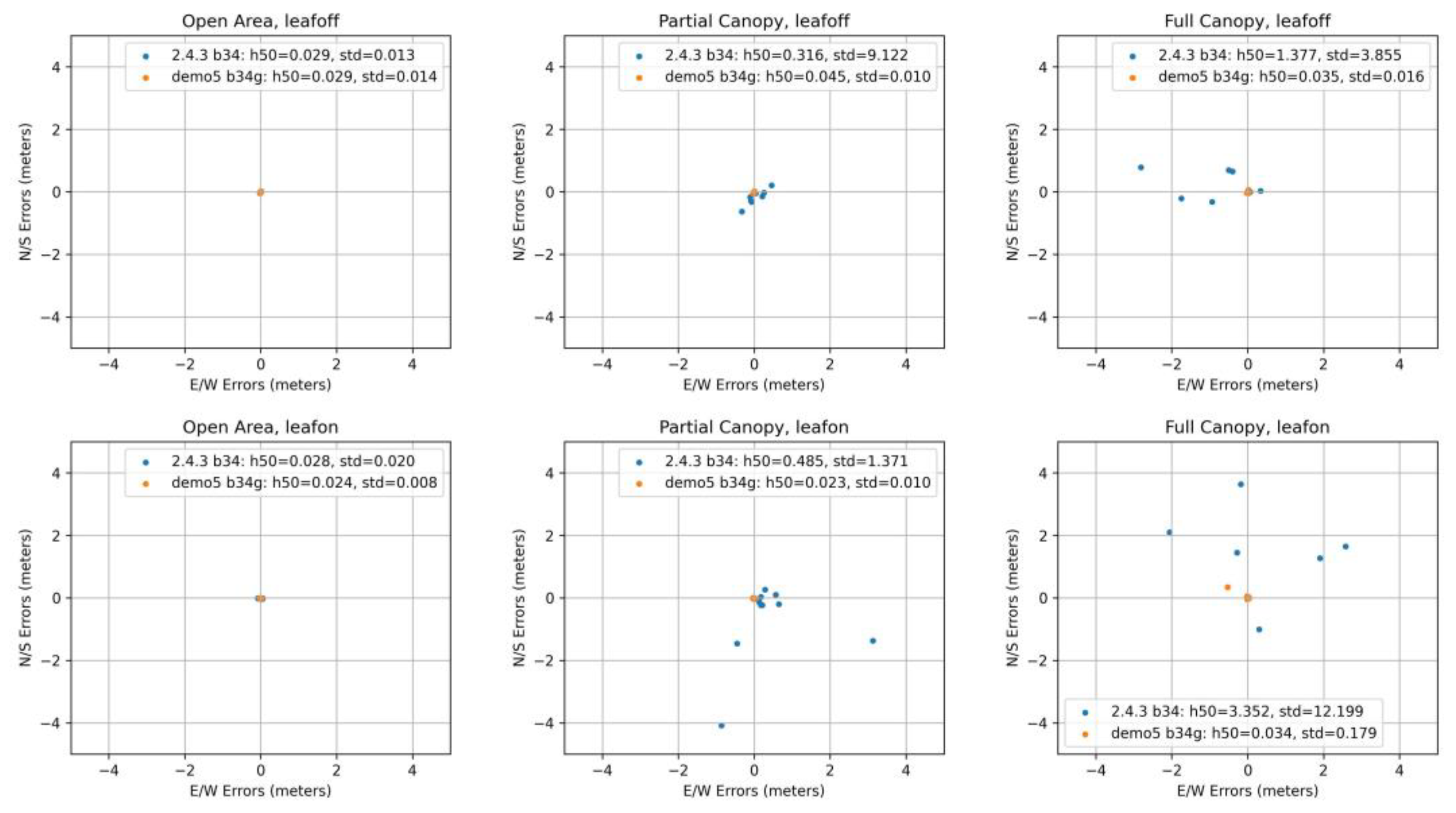
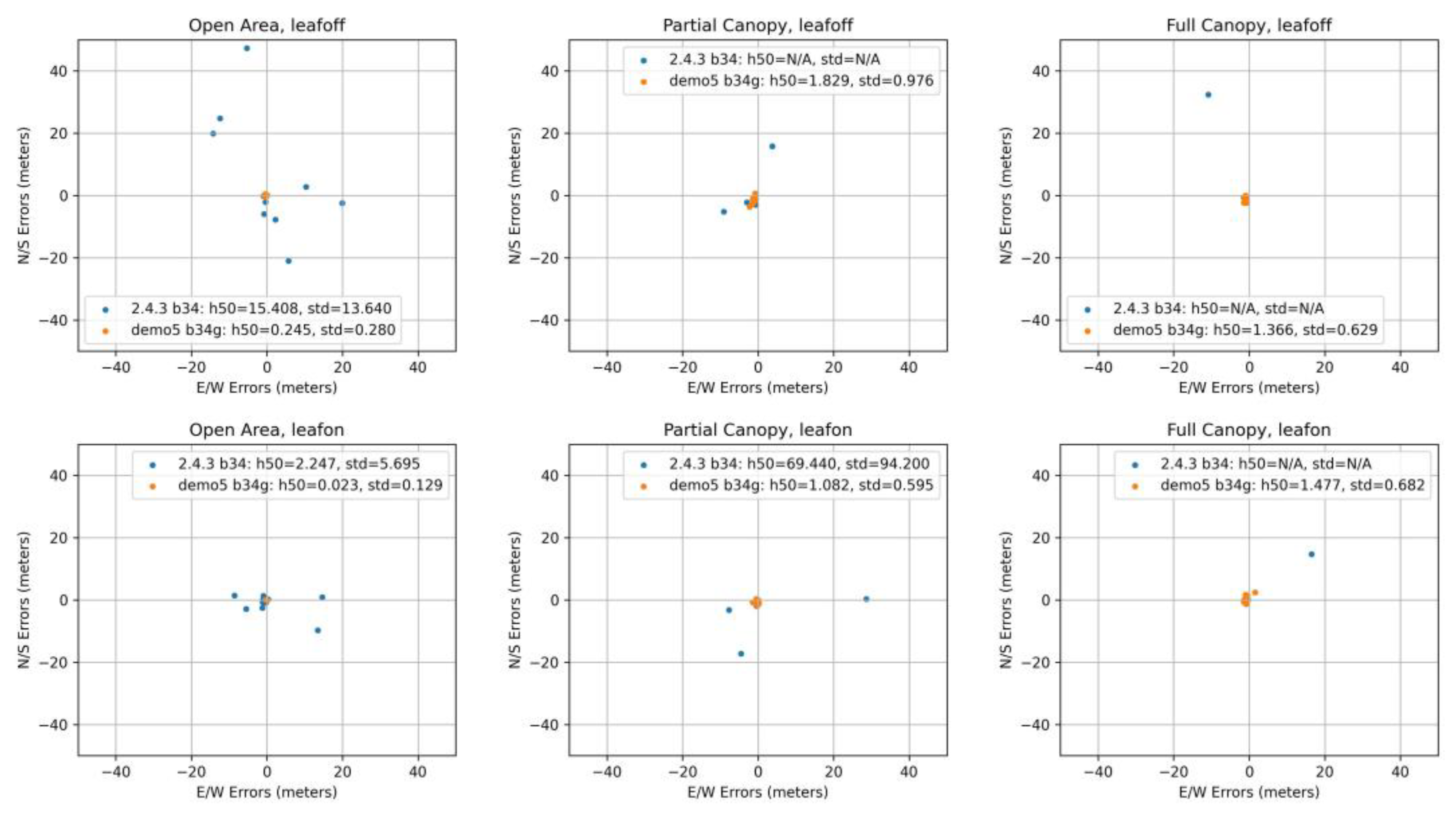
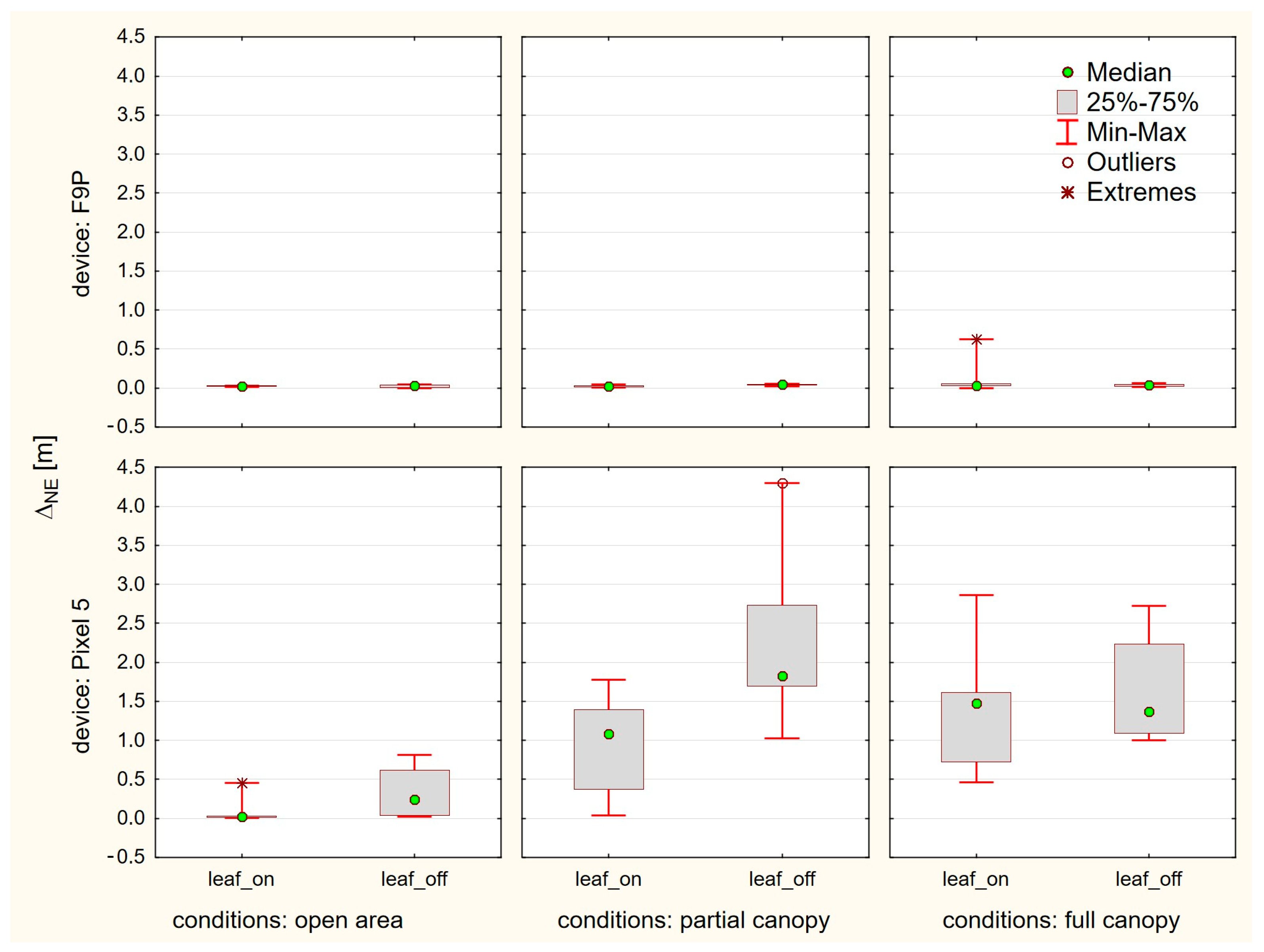
3.3. Horizontal Accuracy
- A single outlier exceeding ten centimeters for the F9P. A horizontal error of 0.629 m is apparent under full canopy, leaf-on conditions.
- A visible increase of errors for the Pixel 5 on the open-area point during the leaf-off season. The median error is ten times higher than for the leaf-on season. The leaf-off median for Pixel 5 is higher unexpectedly also under partial canopy.
- Significant bias for all Pixel 5 measurements under tree canopy, shifting them over one meter in the southwest direction. Such a bias is apparent neither on the open-area point nor for the F9P measurements, thus rejecting possible doubts about the reference.
4. Discussion
- Validity check dealing with higher residuals. The original 2.4.3. code discarded many data due to low quality (especially under partial and full canopy) to the extent where there was no further solution possible. In the Demo5 code, failing the validity check only creates a warning in the debug file, but does not discard the data.
- Improved support for L5 frequency. This is important especially for smartphone dual-frequency receivers as they use the L1/L5 combination rather than L1/L2 combination, which is standard for higher-grade dual-frequency receivers. The original code was optimized for the L1/L2 combination, so the Demo5 version improves the utilization of L5 frequency signals.
- Additional choices and improvements in configuration. Besides the code changes, which in fact represent only a small proportion of the original code, a significant improvement can be achieved by carefully setting up the processing configuration files. In our case, the differences in configurations for the Pixel 5 and F9P receivers were based especially on the quality of the data, which was expected to be lower for the Pixel 5.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gogoi, N.; Minetto, A.; Dovis, F. On the cooperative ranging between android smartphones sharing raw GNSS measurements. In Proceedings of the IEEE Vehicular Technology Conference, Honolulu, HI, USA, 22–25 September 2019; Volume 2019. [Google Scholar]
- Daponte, P.; De Vito, L.; Picariello, F.; Riccio, M. State of the art and future developments of measurement applications on smartphones. Meas. J. Int. Meas. Confed. 2013, 46, 3291–3307. [Google Scholar] [CrossRef]
- Purfürst, T. Evaluation of Static Autonomous GNSS Positioning Accuracy Using Single-, Dual-, and Tri-Frequency Smartphones in Forest Canopy Environments. Sensors 2022, 22, 1289. [Google Scholar] [CrossRef]
- Paziewski, J. Recent advances and perspectives for positioning and applications with smartphone GNSS observations. Meas. Sci. Technol. 2020, 31, 091001. [Google Scholar] [CrossRef]
- Lu, Y.; Ji, S.; Chen, W.; Wang, Z. Assessing the performance of raw measurement from different types of smartphones. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2018, Miami, FL, USA, 24–28 September 2018; pp. 304–322. [Google Scholar]
- Wanninger, L.; Heßelbarth, A. GNSS code and carrier phase observations of a Huawei P30 smartphone: Quality assessment and centimeter-accurate positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Li, G. On the feasibility of resolving Android GNSS carrier-phase ambiguities. J. Geod. 2019, 93, 2621–2635. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Meas. J. Int. Meas. Confed. 2021, 175, 109162. [Google Scholar] [CrossRef]
- Massarweh, L.; Fortunato, M.; Gioia, C. Assessment of Real-time Multipath Detection with Android Raw GNSS Measurements by Using a Xiaomi Mi 8 Smartphone. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; Volume 2020, pp. 1111–1122. [Google Scholar]
- Paziewski, J.; Pugliano, G.; Robustelli, U. Performance assessment of GNSS single point positioning with recent smartphones. In Proceedings of the IMEKO TC-19 International Workshop on Metrology for the Sea, Naples, Italy, 5–7 October 2020; pp. 197–201. [Google Scholar]
- Huang, J.; Guo, Y.; Li, X.; Zhang, N.; Jiang, J.; Wang, G. Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness. Forests 2022, 13, 1591. [Google Scholar] [CrossRef]
- Banville, S.; Lachapelle, G.; Ghoddousi-Fard, R.; Gratton, P. Automated Processing of Low-Cost GNSS Receiver Data. In Proceedings of the Institute of Navigation GNSS+ 2019 Conference, Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Use of PPP Processing for Next-generation Smartphone GNSS Chips: Key Benefits and Challenges. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3862–3878. [Google Scholar]
- Bakuła, M.; Uradziński, M.; Krasuski, K. Performance of DGPS Smartphone Positioning with the Use of P(L1) vs. P(L5) Pseudorange Measurements. Remote Sens. 2022, 14, 929. [Google Scholar] [CrossRef]
- Retscher, G.; Weigert, T. Assessment of a dual-frequency multi-GNSS smartphone for surveying applications. Appl. Geomat. 2022, 14, 765–784. [Google Scholar] [CrossRef]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling High Accuracy Dynamic Applications in Urban Environments Using PPP and RTK on Android Multi-Frequency and Multi-GNSS Smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar]
- Yong, C.; Odolinski, R.; Zaminpardaz, S.; Moore, M.; Rubinov, E.; Er, J.; Denham, M. Instantaneous, dual-frequency, multi-gnss precise rtk positioning using google pixel 4 and samsung galaxy s20 smartphones for zero and short baselines. Sensors 2021, 21, 8318. [Google Scholar] [CrossRef]
- Everett, T.; Taylor, T.; Lee, D.-K.; Akos, D.M. Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors 2022, 22, 3825. [Google Scholar] [CrossRef] [PubMed]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 android smartphone and positioning performance analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Fortunato, M.; Tagliaferro, G.; Fernández-Rodríguez, E.; Critchley-Marrows, J. The whole works: A GNSS/IMU tight coupled filter for android raw GNSS measurements with local ground augmentation strategies. In Proceedings of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 3103–3126. [Google Scholar]
- Tao, X.; Zhu, F.; Hu, X.; Liu, W.; Zhang, X. An enhanced foot-mounted PDR method with adaptive ZUPT and multi-sensors fusion for seamless pedestrian navigation. GPS Solut. 2022, 26, 13. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Li, Q.; Xia, J.; Cai, Y. IMU-Aided Precise Point Positioning Performance Assessment with Smartphones in GNSS-Degraded Urban Environments. Remote Sens. 2022, 14, 4469. [Google Scholar] [CrossRef]
- Hsu, L.-T.; Gu, Y.; Huang, Y.; Kamijo, S. Urban Pedestrian Navigation Using Smartphone-Based Dead Reckoning and 3-D Map-Aided GNSS. IEEE Sens. J. 2016, 16, 1281–1293. [Google Scholar] [CrossRef]
- Netthonglang, C.; Thongtan, T.; Satirapod, C. GNSS Precise Positioning Determinations Using Smartphones. In Proceedings of the 2019 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Bangkok, Thailand, 11–14 November 2019; pp. 401–404. [Google Scholar]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal characterization and assessment of code GNSS positioning with low-power consumption smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef] [Green Version]
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Morelli, L.; Menna, F.; Vitti, A.; Remondino, F. Action Cams and Low-Cost Multi-Frequency Antennas for Gnss Assisted Photogrammetric Applications Without Ground Control Points. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2022, 48, 171–176. [Google Scholar] [CrossRef]
- Paziewski, J. Multi-constellation single-frequency ionospheric-free precise point positioning with low-cost receivers. GPS Solut. 2022, 26, 23. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: A low-cost and high-grade receivers GPS-BDS RTK analysis. J. Geod. 2016, 90, 1255–1278. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Low-cost, 4-system, precise GNSS positioning: A GPS, Galileo, BDS and QZSS ionosphere-weighted RTK analysis. Meas. Sci. Technol. 2017, 28, 125801. [Google Scholar] [CrossRef] [Green Version]
- Hohensinn, R.; Stauffer, R.; Glaner, M.F.; Herrera Pinzón, I.D.; Vuadens, E.; Rossi, Y.; Clinton, J.; Rothacher, M. Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications. Remote Sens. 2022, 14, 5100. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Best integer equivariant estimation: Performance analysis using real data collected by low-cost, single- and dual-frequency, multi-GNSS receivers for short- to long-baseline RTK positioning. J. Geod. 2020, 94, 91. [Google Scholar] [CrossRef]
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of using low-cost dual-frequency gnss receivers for land surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef] [PubMed]
- Krietemeyer, A.; van der Marel, H.; van de Giesen, N.; ten Veldhuis, M.C. High quality zenith tropospheric delay estimation using a low-cost dual-frequency receiver and relative antenna calibration. Remote Sens. 2020, 12, 1393. [Google Scholar] [CrossRef]
- Brach, M.; Stereńczak, K.; Bolibok, L.; Kwaśny, Ł.; Krok, G.; Laszkowski, M. Impacts of forest spatial structure on variation of the multipath phenomenon of navigation satellite signals. Folia For. Pol. 2019, 61, 3–21. [Google Scholar] [CrossRef] [Green Version]
- Angrisano, A.; Gaglione, S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors 2022, 22, 786. [Google Scholar] [CrossRef]
- Špánik, P.; Hefty, J. Multipath detection with the combination of SNR measurements—Example from urban environment. Geod. Cartogr. 2018, 66, 305–316. [Google Scholar] [CrossRef] [Green Version]
- Wen, W.; Hsu, L.T. 3D LiDAR Aided GNSS NLOS Mitigation in Urban Canyons. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18224–18236. [Google Scholar] [CrossRef]
- Frank, J.; Wing, M.G. Balancing horizontal accuracy and data collection efficiency with mapping-grade GPS receivers. Forestry 2014, 87, 389–397. [Google Scholar] [CrossRef] [Green Version]
- Zimbelman, E.G.; Keefe, R.F. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar]
- Tomaštík, J.; Everett, T. u-Blox F9P and Google Pixel 5 (Repeated 20 Minutes Static Measurements under Variable Conditions), Version 1. Mendeley Data. 2023. Available online: https://data.mendeley.com/datasets/83bvxzx3bj (accessed on 15 February 2023).
- Mervart, L.; Weber, G.; Stürze, A.; Stöckner, D. BKG Ntrip Client (BNC). Available online: https://igs.bkg.bund.de/ntrip/bnc (accessed on 10 February 2023).
- WinTEQC Editor. Available online: https://teqc.silkwerks.com/ (accessed on 10 February 2023).
- Estey, L.; Wier, S. Teqc Tutorial: Basics of Teqc Use and Teqc Products; UNAVCO Inc.: Colorado, CO, USA, 2014; pp. 1–61. [Google Scholar]
- Takasu, T. RTKLib. Available online: https://rtklib.com/ (accessed on 10 February 2023).
- Everett, T. RTKLib Demo5. Available online: https://github.com/rtklibexplorer/RTKLIB (accessed on 10 February 2023).
- Everett, T. 3rd Place Winner: 2022 Smartphone Decimeter Challenge: An RTKLIB Open-Source Based Solution. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; Institute of Navigation: Manassas, VA, USA, 2022; pp. 2265–2275. [Google Scholar]
- Fortunato, M.; Ravanelli, M.; Mazzoni, A. Real-Time Geophysical Applications with Android GNSS Raw Measurements. Remote Sens. 2019, 11, 2113. [Google Scholar] [CrossRef] [Green Version]
- Hricko, B. Využitie GPS pri mapovaní v zalesnených územiach. Kartogr. List. 2003, 11, 16–23. [Google Scholar]
- Magalhães, A.; Bastos, L.; Maia, D.; Gonçalves, J.A. Relative positioning in remote areas using a gnss dual frequency smartphone. Sensors 2021, 21, 8354. [Google Scholar] [CrossRef]
- Li, G.; Geng, J. Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solut. 2019, 23, 90. [Google Scholar] [CrossRef]
- Zeng, S.; Kuang, C.; Yu, W. Evaluation of Real-Time Kinematic Positioning and Deformation Monitoring Using Xiaomi Mi 8 Smartphone. Appl. Sci. 2022, 12, 435. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Jiang, Y.; Gao, Y. GNSS Observation Generation from Smartphone Android Location API: Performance of Existing Apps, Issues and Improvement. Sensors 2023, 23, 777. [Google Scholar] [CrossRef]
- Tomaštík, J.; Varga, M. Practical applicability of processing static, short-observation-time raw GNSS measurements provided by a smartphone under vegetation conditions. Measurement 2021, 178, 109397. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P. Evaluation of low-cost RTK GNSS receiver in motion under demanding conditions. Sensors 2021, 21, 5552. [Google Scholar] [CrossRef] [PubMed]
- Hamza, V.; Stopar, B.; Sterle, O. Testing the Performance of Multi-Frequency Low-Cost GNSS Receivers and Antennas. Sensors 2021, 21, 2029. [Google Scholar] [CrossRef] [PubMed]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal mapping using dji phantom 4 RTK in post-processing kinematic mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Google Raw GNSS Measurements|Android Developers. Available online: https://developer.android.com/guide/topics/sensors/gnss (accessed on 10 February 2020).
- Tomaštík, J.; Tunák, D. Compass measurement—Still a suitable surveying method in specific conditions. Geod. Cartogr. 2015, 41, 31–40. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, F.; Centre, W.A. 3D Mapping by Photogrammetry and LiDAR in Forest Studies. World Sci. News 2018, 95, 224–234. [Google Scholar]
- Kardoš, M. Methods of digital photogrammetry in forest management in Slovakia. J. For. Sci. 2013, 59, 54–63. [Google Scholar] [CrossRef] [Green Version]
- Tomaštík, J.; Chudá, J.; Tunák, D.; Chudý, F.; Kardoš, M. Advances in smartphone positioning in forests: Dual-frequency receivers and raw GNSS data. For. Int. J. For. Res. 2020, 94, 292–310. [Google Scholar] [CrossRef]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2020, 24, 9. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones. Adv. Sp. Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Google Decimeter Challenge. Available online: https://www.kaggle.com/competitions/smartphone-decimeter-2022 (accessed on 7 March 2023).
- California Department of Transportation Surveys Manual. Available online: https://dot.ca.gov/programs/right-of-way/surveys-manual-and-interim-guidelines (accessed on 8 March 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | Easting | Northing |
|---|---|---|
| Open area | 48.57181624° | 19.11913261° |
| Partial canopy | 48.57257093° | 19.11909391° |
| Full canopy | 48.57227248° | 19.12147211° |
| Device | Constellations | Frequencies |
|---|---|---|
| Google Pixel 5 | GPS, GLONASS, Galileo, Beidou, QZSS, Navic | L1C/A + L5, L1OF, E1B + E5a, B1I + B2a |
| u-Blox ZED F9P | GPS, GLONASS, Beidou, Galileo, SBAS | L1C/A + L2C, L1OF + L2OF, E1B + E5b, B1I + B2I |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomaštík, J.; Everett, T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors 2023, 23, 3136. https://doi.org/10.3390/s23063136
Tomaštík J, Everett T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors. 2023; 23(6):3136. https://doi.org/10.3390/s23063136
Chicago/Turabian StyleTomaštík, Julián, and Tim Everett. 2023. "Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software" Sensors 23, no. 6: 3136. https://doi.org/10.3390/s23063136