1. Introduction
Compared with early navigation methods, modern navigation has entered the information age centered on integrated navigation systems. The integrated navigation system is also called multi-sensor information fusion. According to different task scenarios, using multiple sensors for integrated navigation and optimally fusing multiple types of information according to a certain optimal fusion criterion can be expected to improve positioning accuracy. Commonly used single-sensor navigation methods today include the Inertial Navigation System (Inertial Navigation System, INS), which has autonomous navigation capabilities, but INS positioning error drifts greatly over time [
1]. The other one is the Satellite Navigation System (Global Navigation Satellite System, GNSS), which has all-weather, high-precision positioning ability. However, GNSS has the shortcomings of insufficient satellite signal reception and an instantaneous increase in positioning error when the signal is blocked [
2]. Integrated navigation is designed based on the complementary performance of a single navigation system; that is, the combination of GNSS/INS can achieve autonomous and high-precision navigation and positioning to a certain extent [
3,
4]. This combination method has been studied in academia and has been applied in industry. However, in areas such as tall buildings, or tunnels and mines, GNSS signals cannot be received for a long time, and at the same time, the INS positioning error drifts greatly. For example, under the mine, there is no GNSS signal, and it needs to rely on INS for a long time. However, the positioning error of tactical IMU will drift to about 10 m within one minute [
5]. In this context, this article proposes to use Low Earth Orbit constellation enhancement and 5G signals as new sensor signal sources for integrated navigation simulation experiments to solve the positioning failure caused by the lack of GNSS signals in specific areas.
Since 2020, the discussion of “new infrastructure” in China has heated up dramatically. As can be seen from relevant research reports [
6,
7], in the new infrastructure, both satellite internet and 5G infrastructure construction can be used as a National Positioning Infrastructure (NPI).
Satellite internet projects such as Telesat, OneWeb, and Starlink are mainly distributed in the orbit altitude range of 400 km to 1400 km. In China, constellations represented by “Hongyan Constellation”, “Hongyun Project”, “Xingyun Project”, “Celestial Constellations”, and “Milky Way 5G” were designed with heights ranging from 500 km to 1200 km. The above satellite constellations can all be called Low Earth Orbit Satellite Systems (LEO). Nowadays, the accuracy of low-orbit satellite orbit calculation can reach the centimeter-level [
8,
9,
10]. The satellite launch and networking technologies have become more mature so that the number of available satellites has greatly increased, and some technical problems of low-orbit satellite navigation algorithms have been solved. Combining satellite load and application requirements, designing a low-orbit constellation that can be used for navigation, and forming a low-orbit constellation with integrated communication and navigation is an inevitable trend of constellation development [
11,
12,
13]. At the same time, the research of combining LEO and INS for navigation is in the ascendant. Existing research shows that when there is no GNSS signal, the accuracy of integrated navigation using LEO constellation signal and INS is obviously higher than that using INS alone. This proves that using LEO/INS is feasible [
14]. Taking advantage of the fast speed of LEO satellite, Doppler frequency shift measurement and positioning technology can be used in LEO satellite. The effect of tight coupling between this technology and INS is also very good, when GNSS is unavailable for 30 s, the final error is reduced from 31.7 m to 8.9 m [
15,
16,
17,
18].
As another main component of the new infrastructure, the 5th-generation mobile communication system (5th-generation, 5G) is widely regarded as the foundation of the new generation of the internet. The Internet of Things and Industrial Internet based on 5G have also received widespread attention [
19]. The international standards organization 3GPP (3rd Generation Partnership Project), which is leading the 5G communication system protocol standard, has formally defined the commercial application scenarios of 5G positioning requirements in the TR22.872 standard [
20]. The use of 5G communication systems for indoor and outdoor positioning is a current research hotspot. Indoor and outdoor positioning algorithms based on the characteristics of 5G millimeter-wave signals have also been extensively studied, and the existing algorithms have reached sub-meter positioning accuracy [
21,
22,
23]. Hybrid positioning schemes based on the fusion of 5G cellular, GNSS/INS are to be studied and developed towards a universal solution for robust positioning of aerial or ground vehicles in urban, rural, and indoor scenarios [
24]. Studies have also shown that positioning 5G base stations on both sides of the expressway can improve the robustness and accuracy of the car navigation system on the road [
25]. The research of indoor and outdoor joint positioning using 5G shows that when there is no GNSS signal, it is a good choice to use 5G signal instead. Although there have studies use federated filtering, INS is not used as a reference system [
26,
27]. These studies show that integrated navigation using new sensors needs to be more comprehensive.
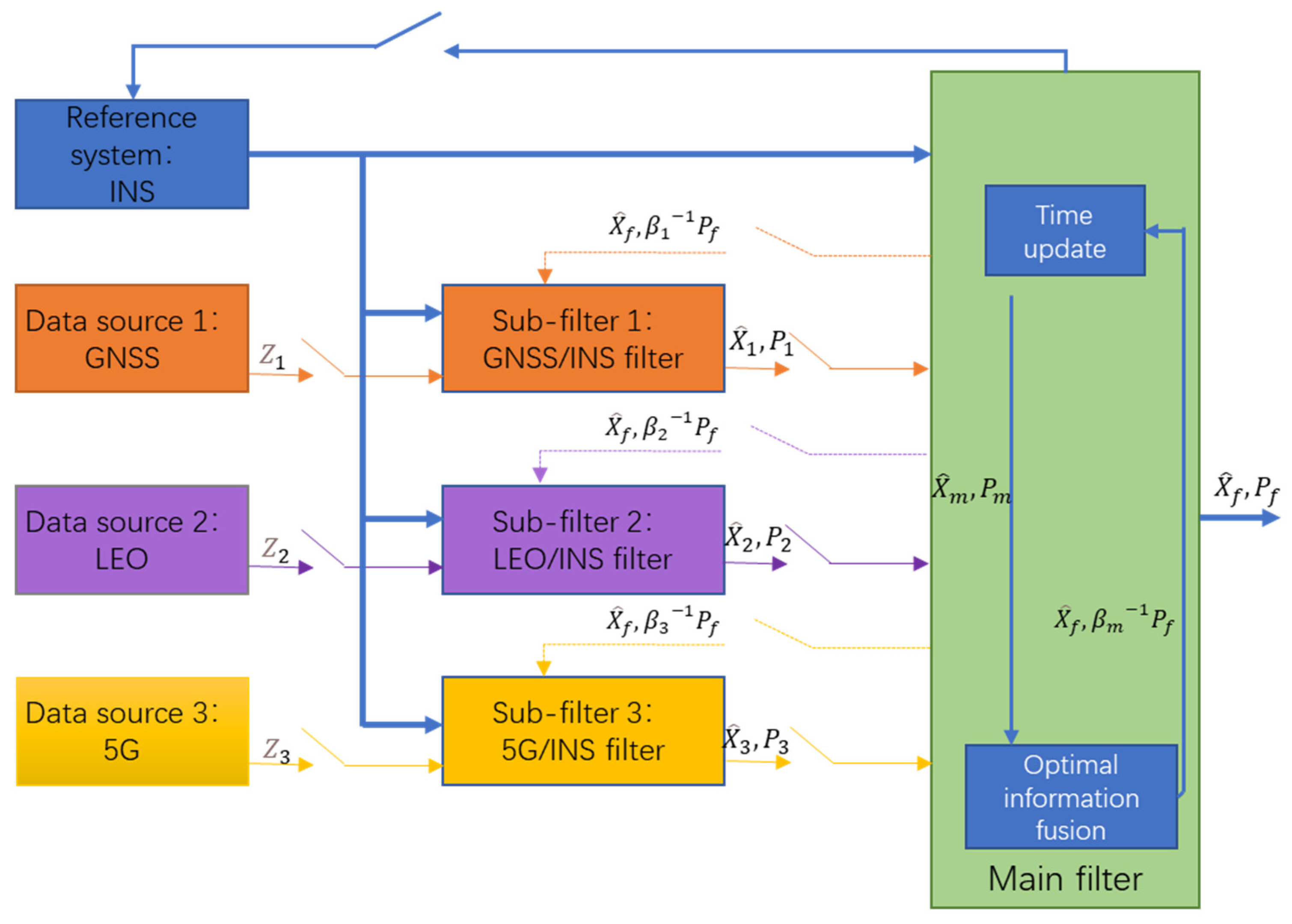
In the above context, this article finds that algorithm research and technical application of combined GNSS/INS/LEO/5G navigation and positioning are ascendant in the existing research. Therefore, based on the new sensors included in the new infrastructure, this article proposes implementing a GNSS/INS/LEO/5G integrated navigation simulation experiment by using a federated filtering algorithm to verify the feasibility and positioning accuracy of different integrated navigation positioning schemes.
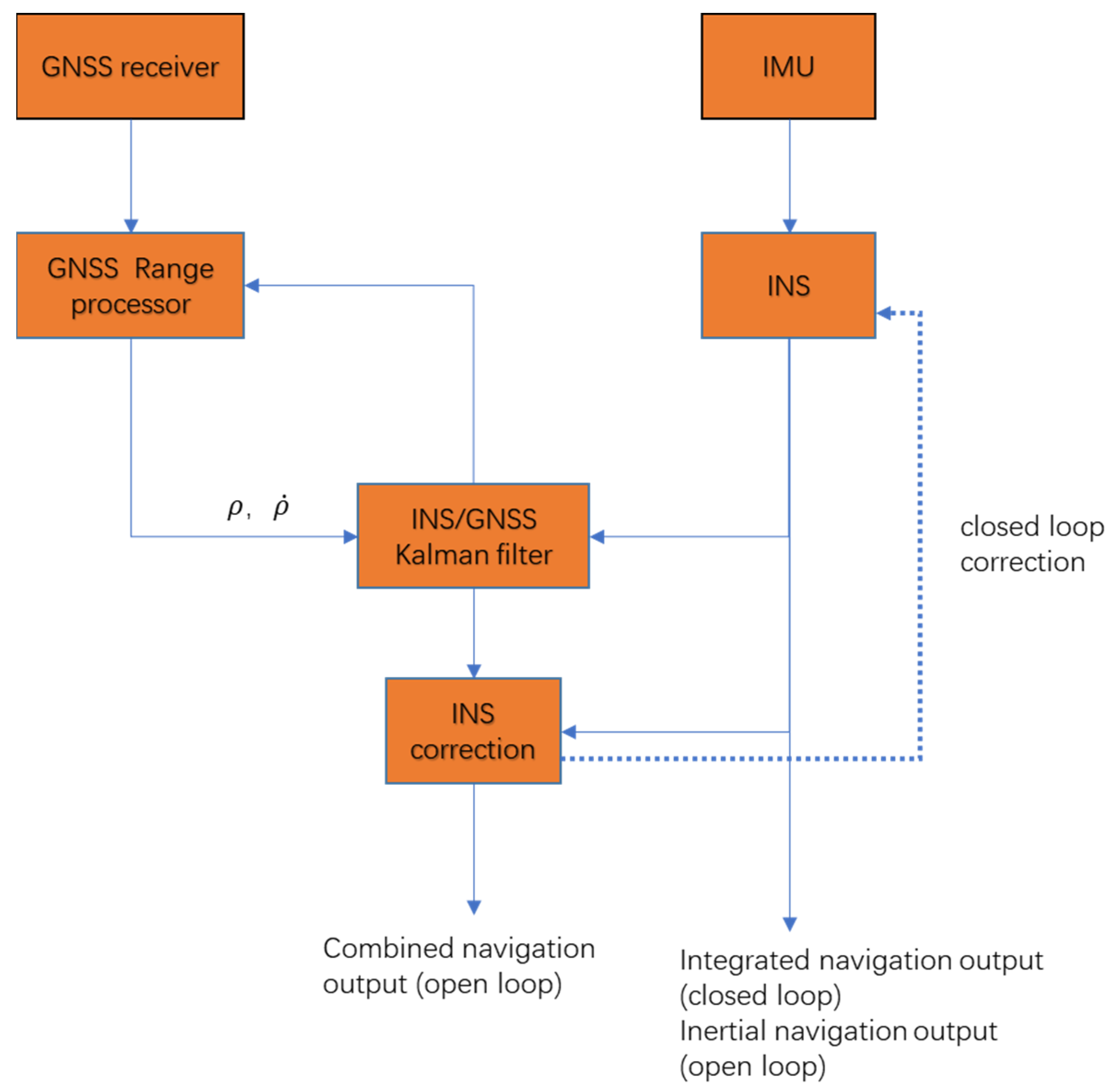
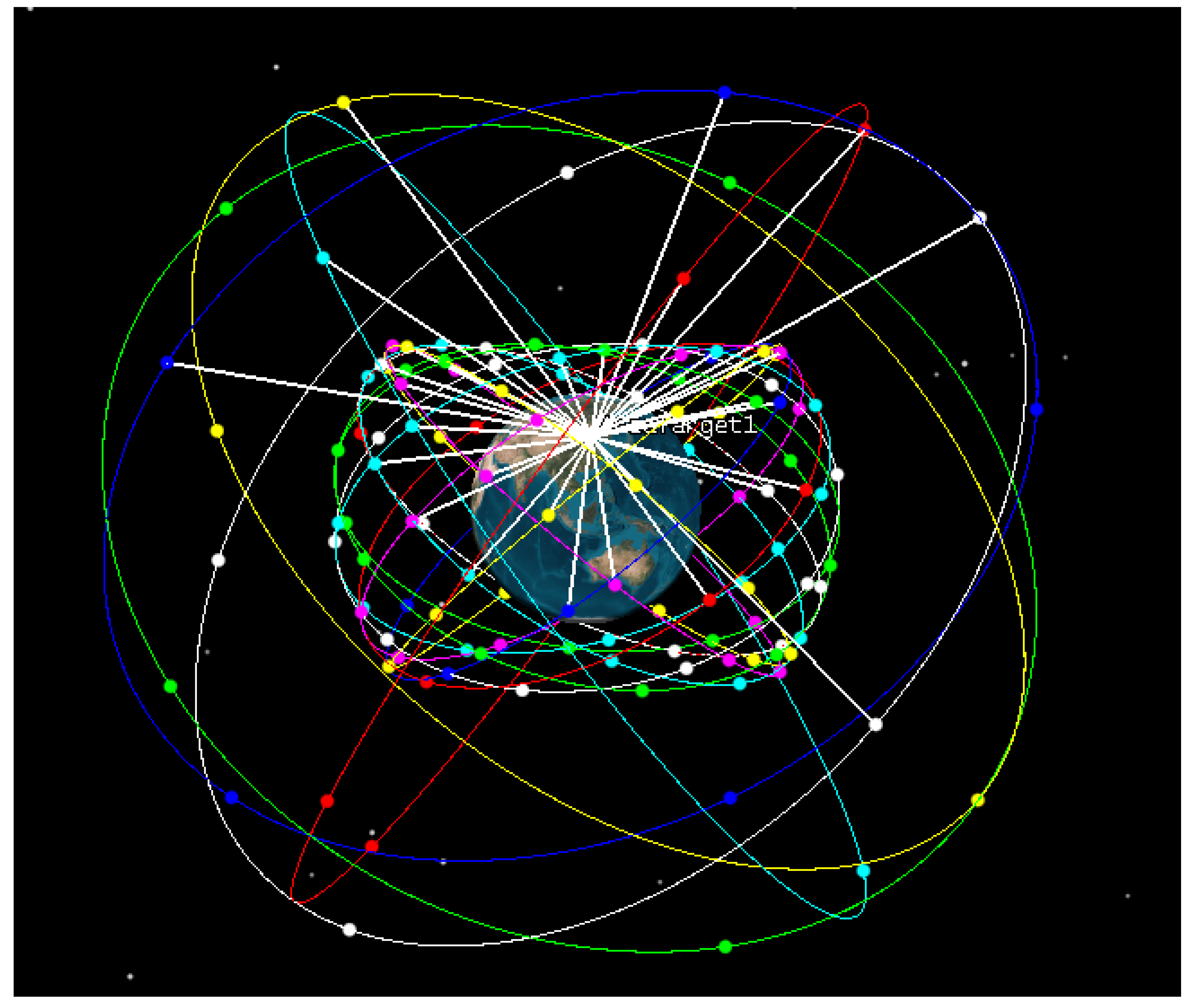
The integrated navigation simulation verification scheme in this article uses GNSS and LEO satellite constellations simulations to derive the satellite position and speed in the simulation time, which is used as the data source for the integrated navigation satellite positioning. The IMU error model is used to build IMU output specific force and angular velocity models, which are used for integrated navigation, as the INS’s data sources. The 5G ranging signal is simulated by adding random noise based on the given theoretical coordinates of the base station and receiver, based on the 5G ranging signal error model, to provide the ranging value of the 5G signal. Through the implementation of a federated filtering algorithm, the combined navigation and positioning results of the above multi-source signals are output and compared with the true value to verify the navigation and positioning accuracy.
The structure of this article is as follows. The first section is the introduction; the second section introduces the algorithm model used in this article, including algorithm structure frame, simulation scene construction, and simulation method of each signal source; in the third section, the experimental results are compared and explained; finally, in the fourth section, the author puts forward the summary and conclusions of this article. The potential innovations of this article are as follows: simulation verifies the advantages of new integrated navigation using LEO constellation and 5G over traditional integrated navigation; the applicability of the new integrated navigation proposed in this article is presented for the positioning effect in different scenarios. A proposal of information factor allocation using a federated filtering algorithm is proposed when different precision sensors are used.
4. Conclusions
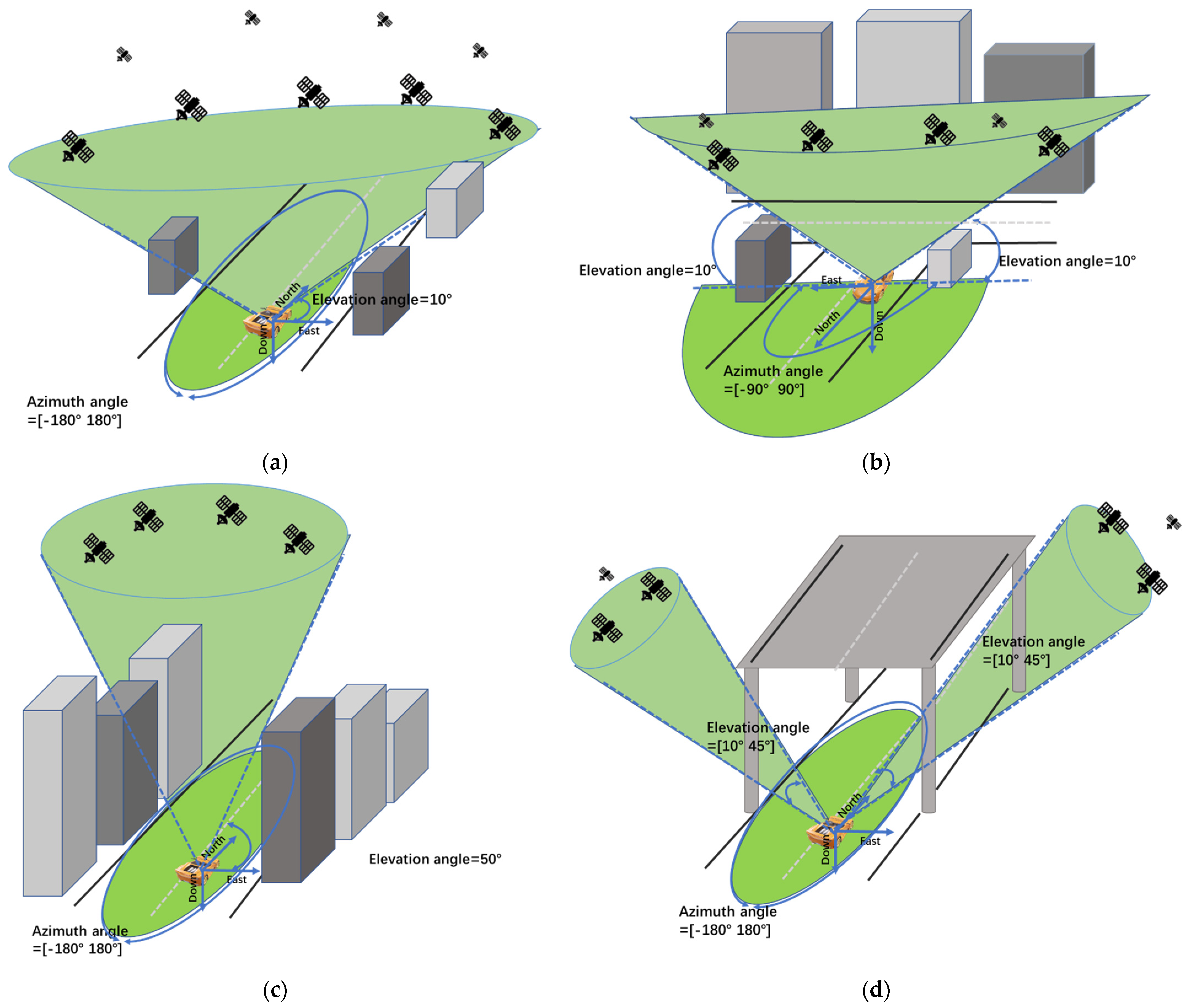
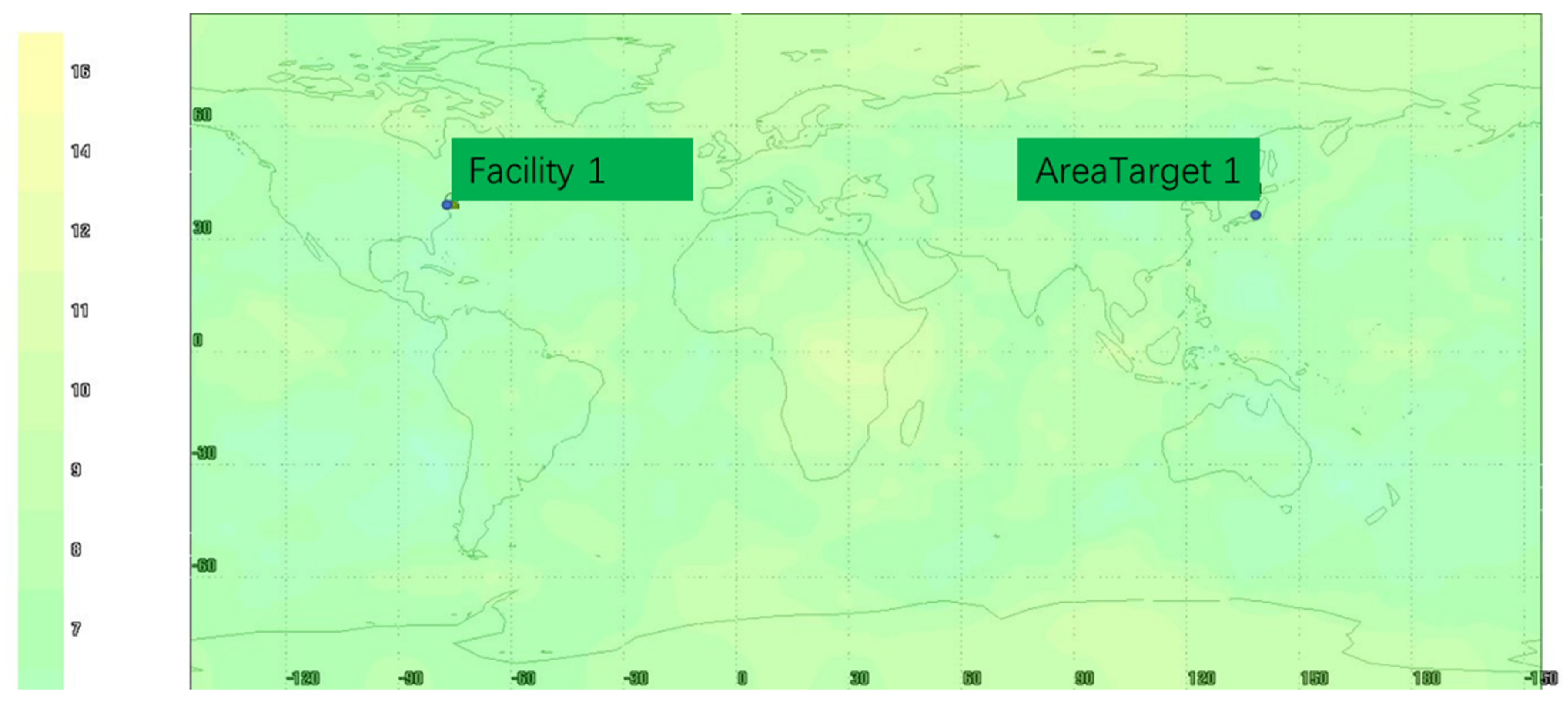
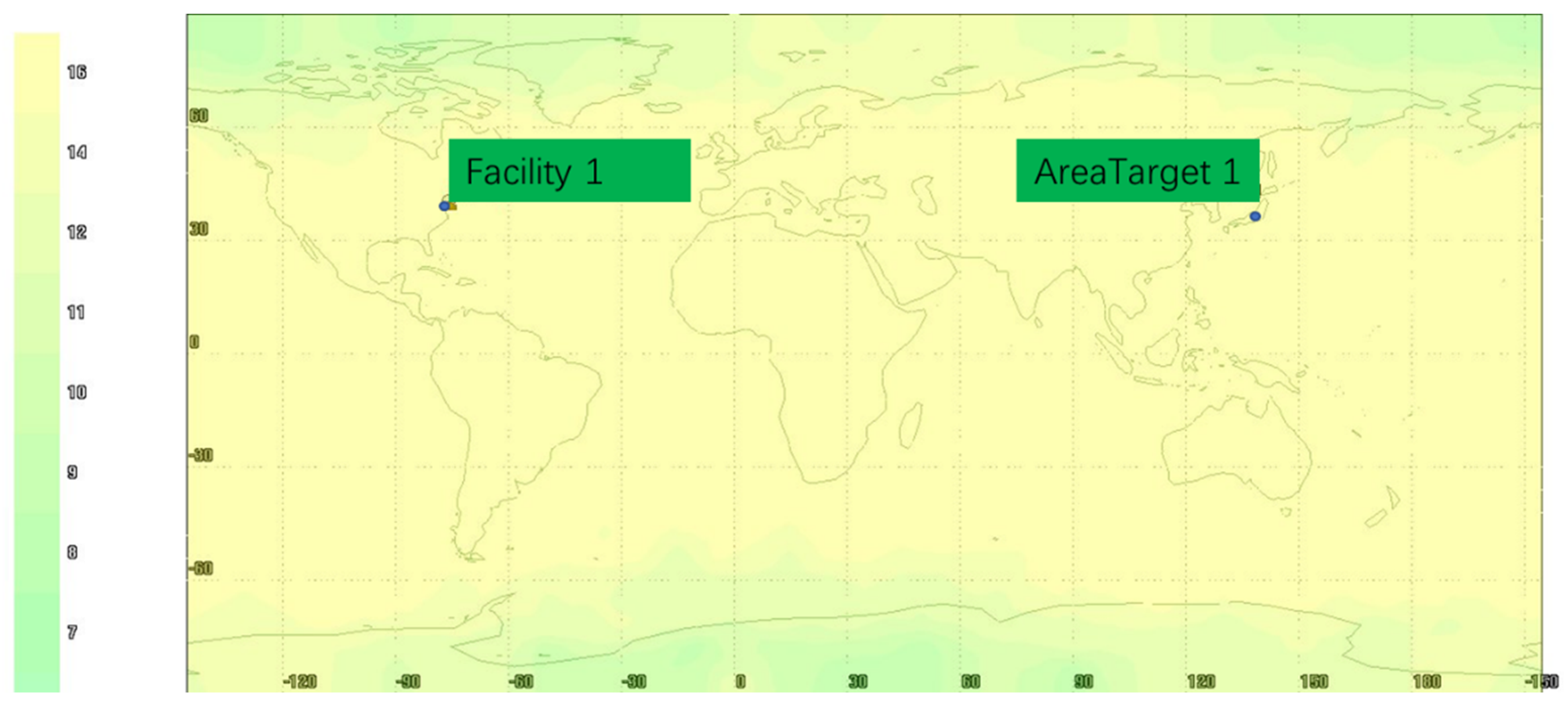
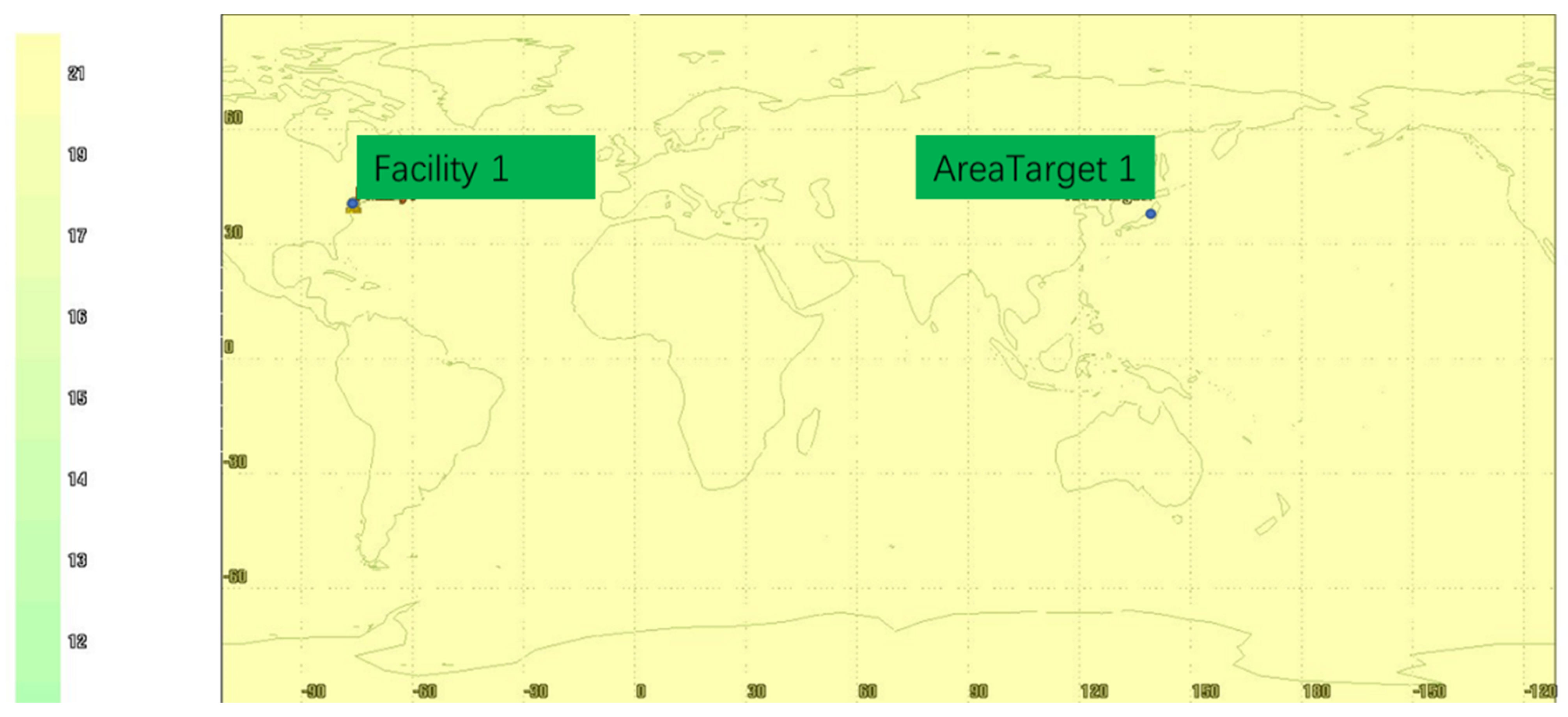
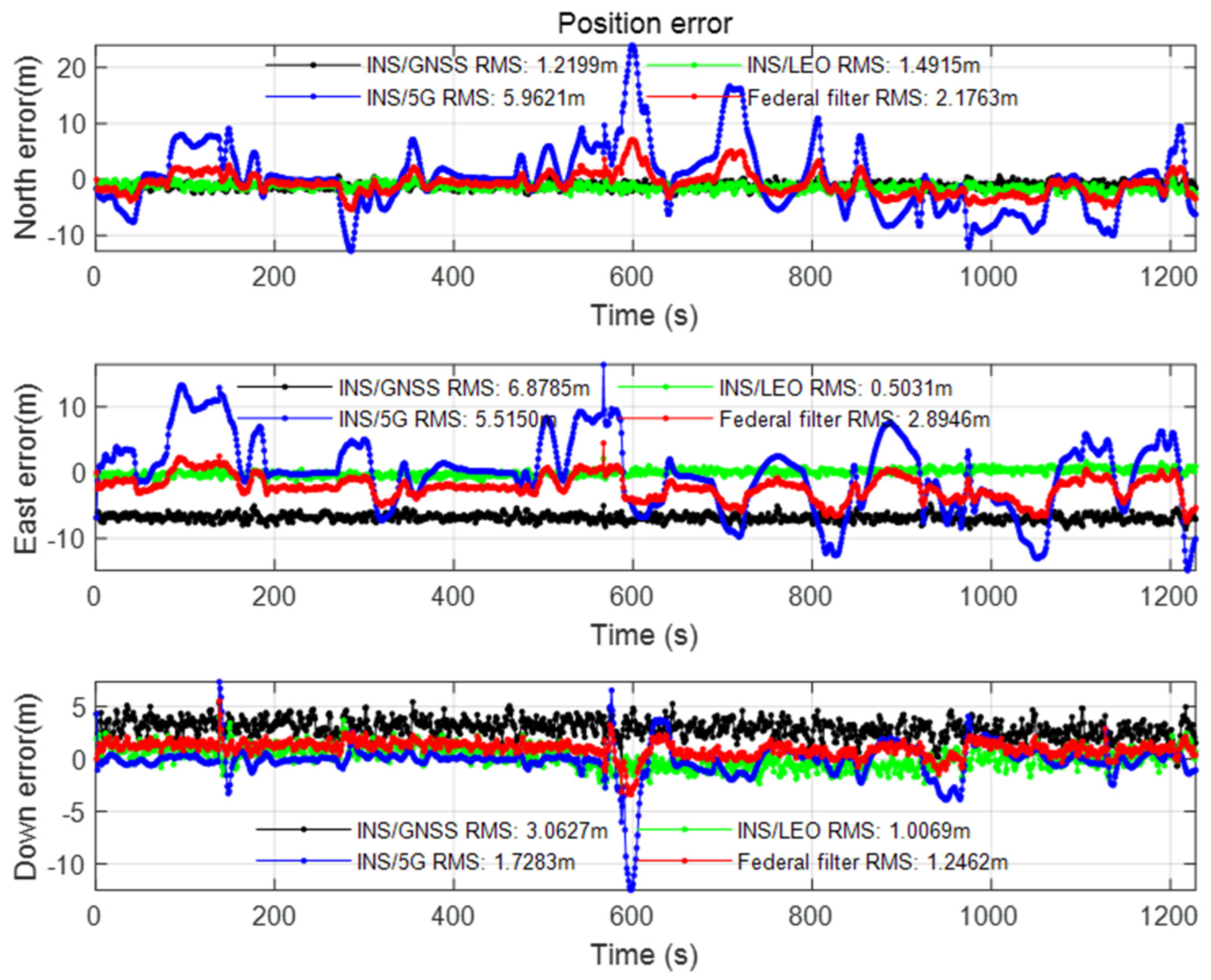
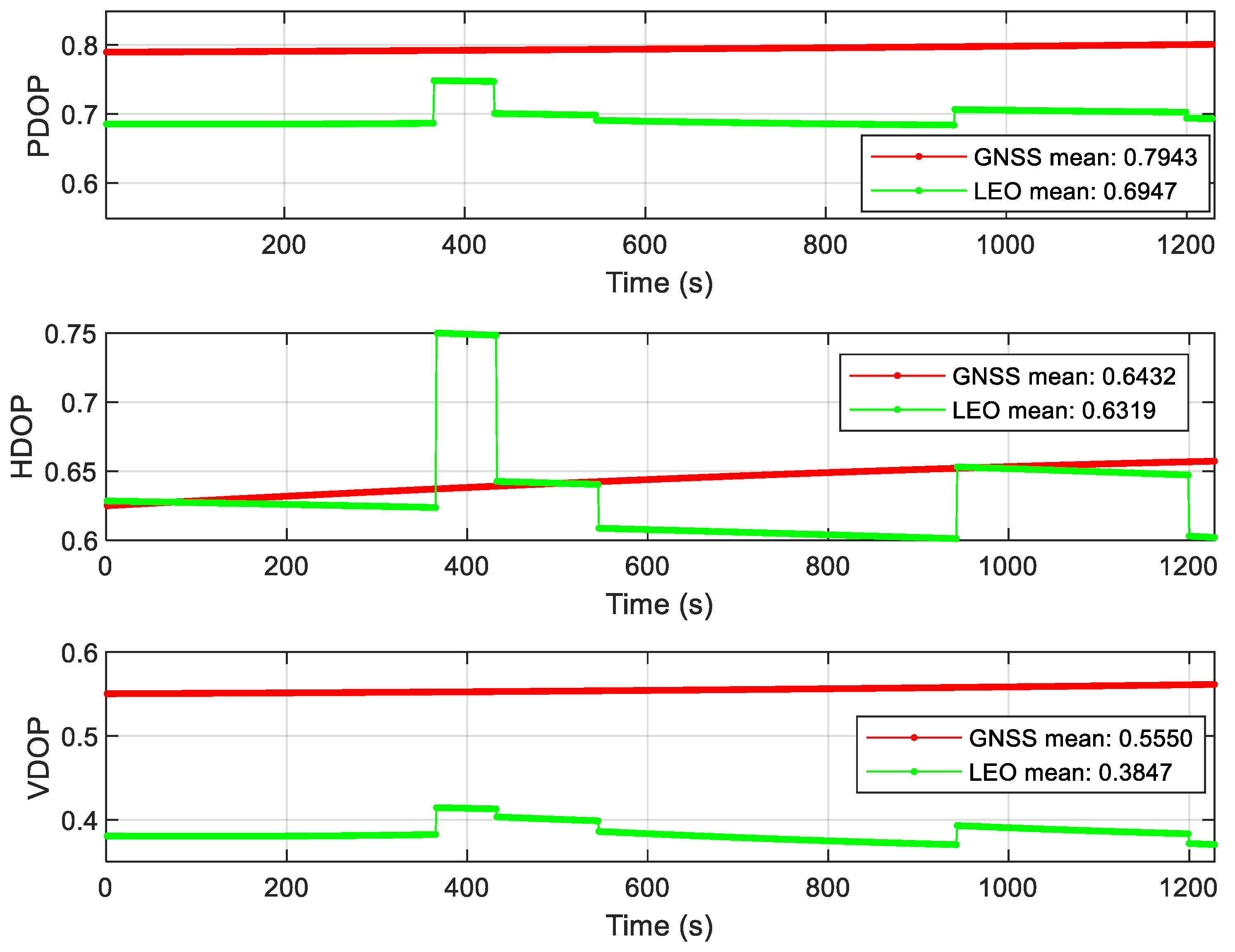
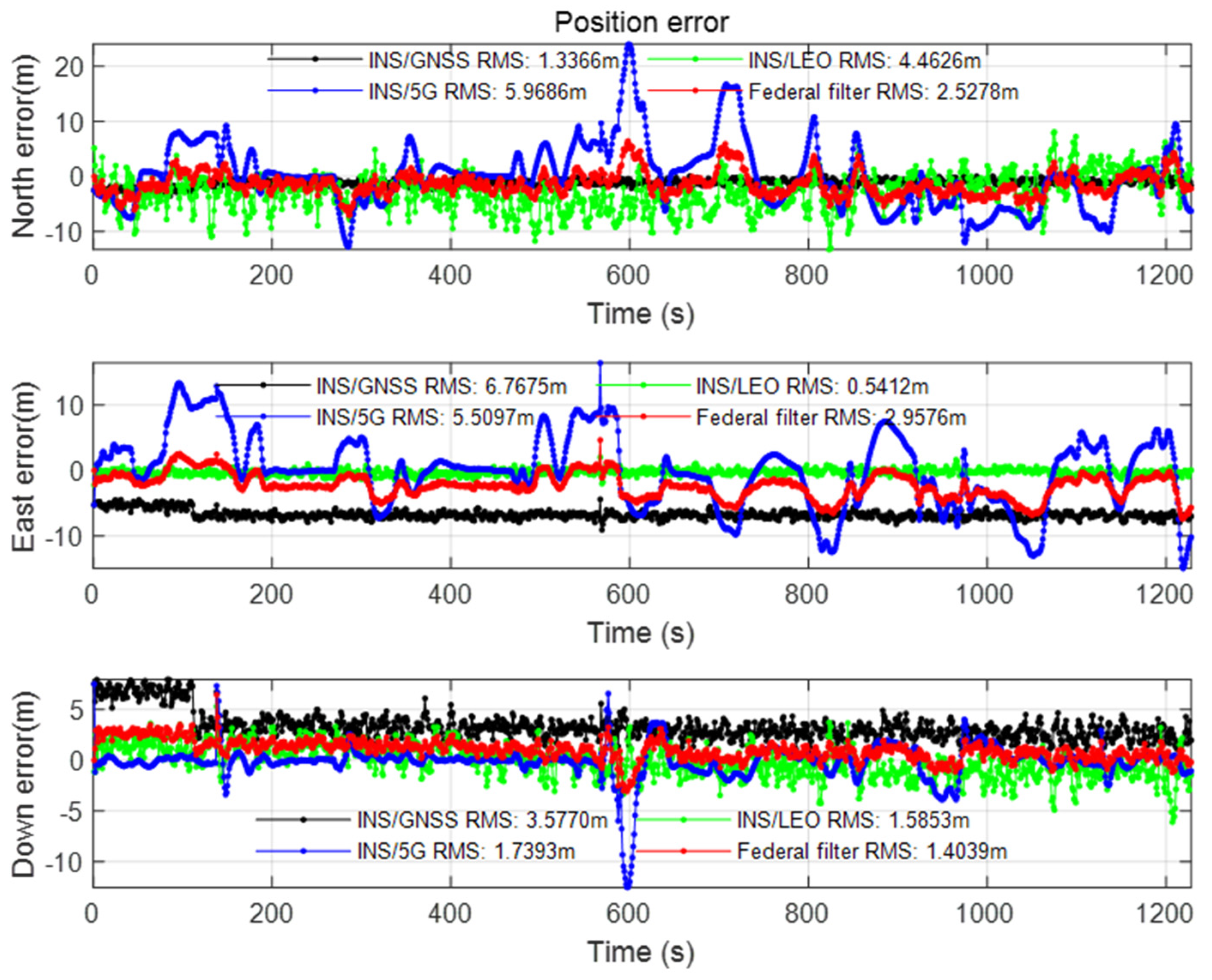
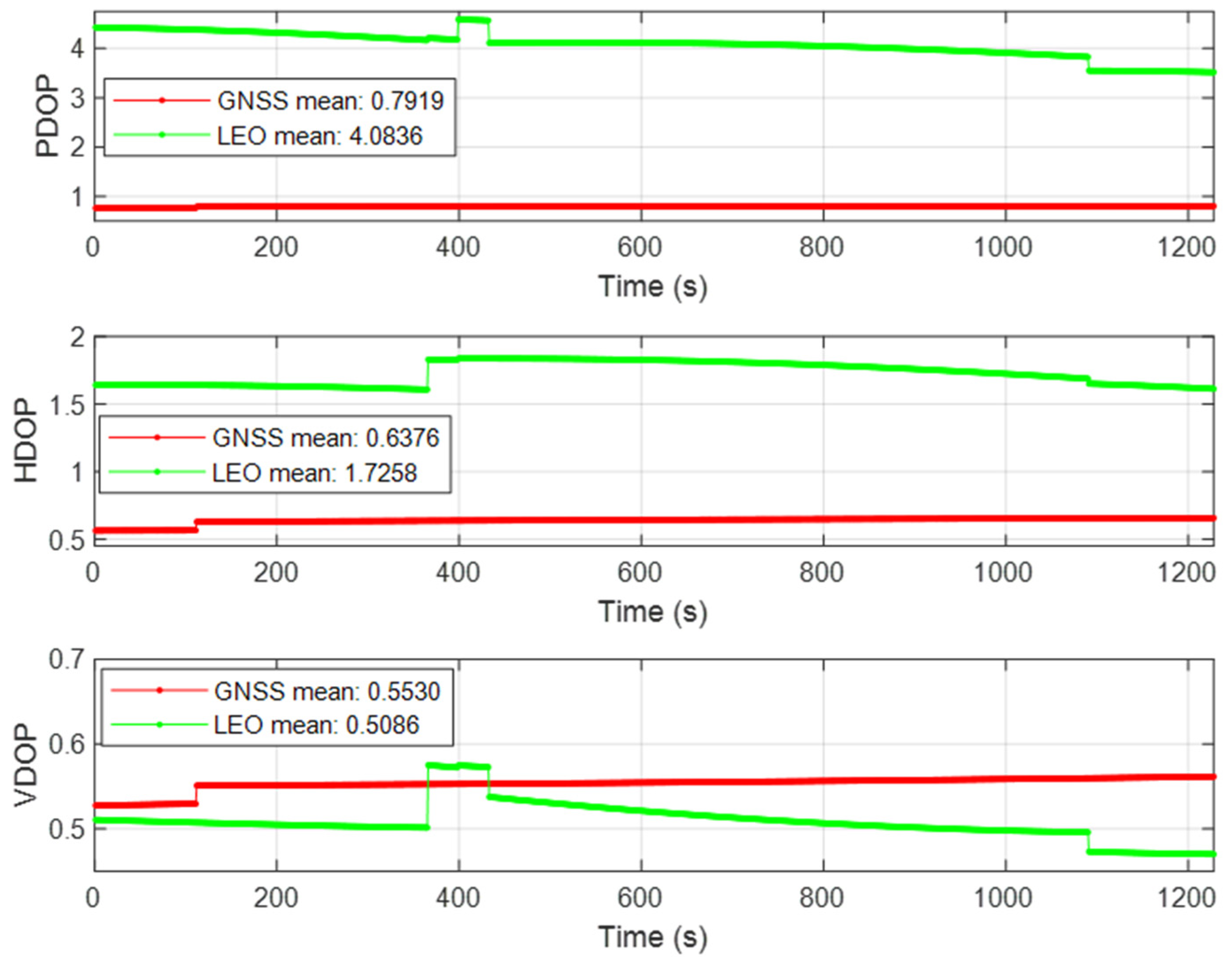
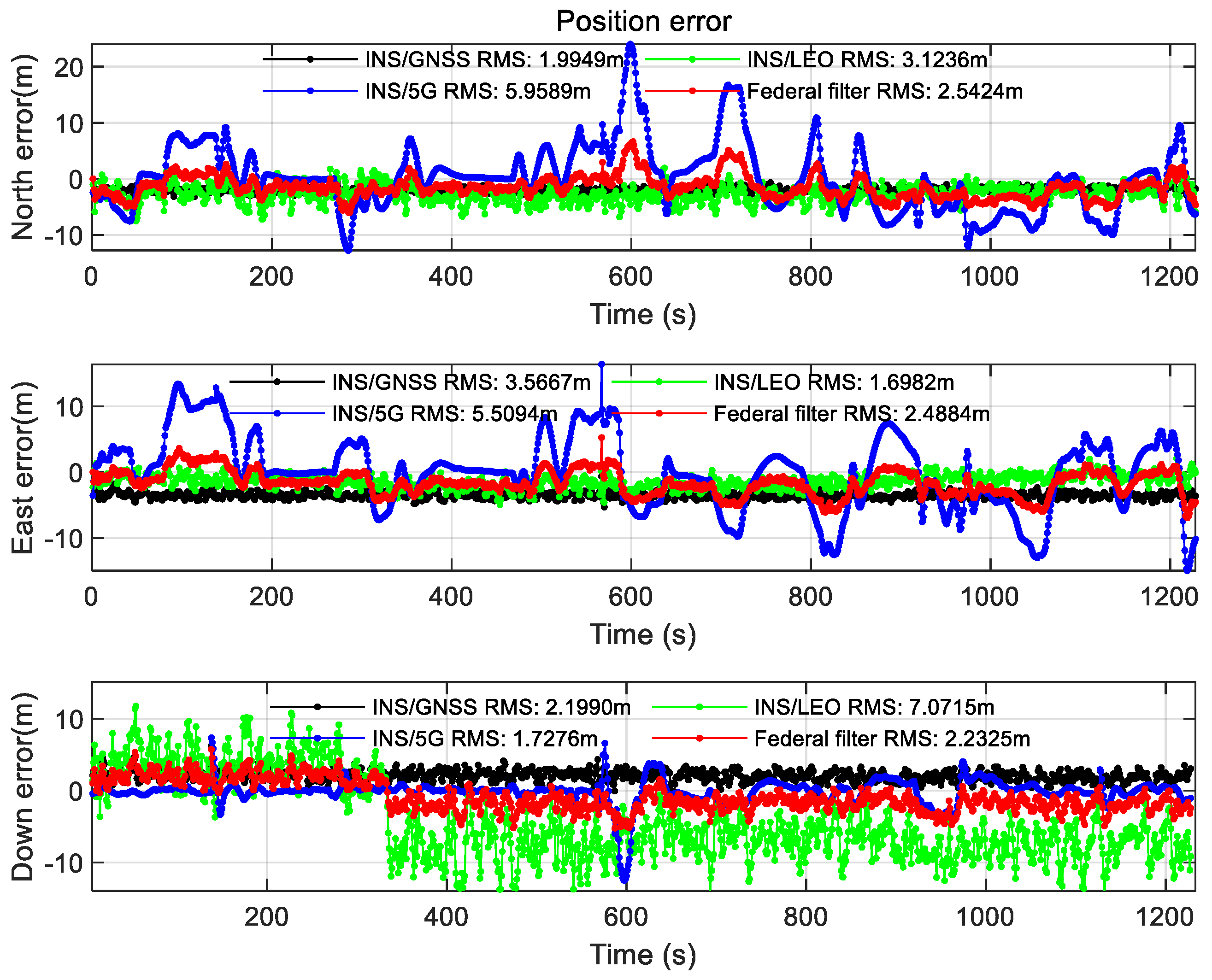
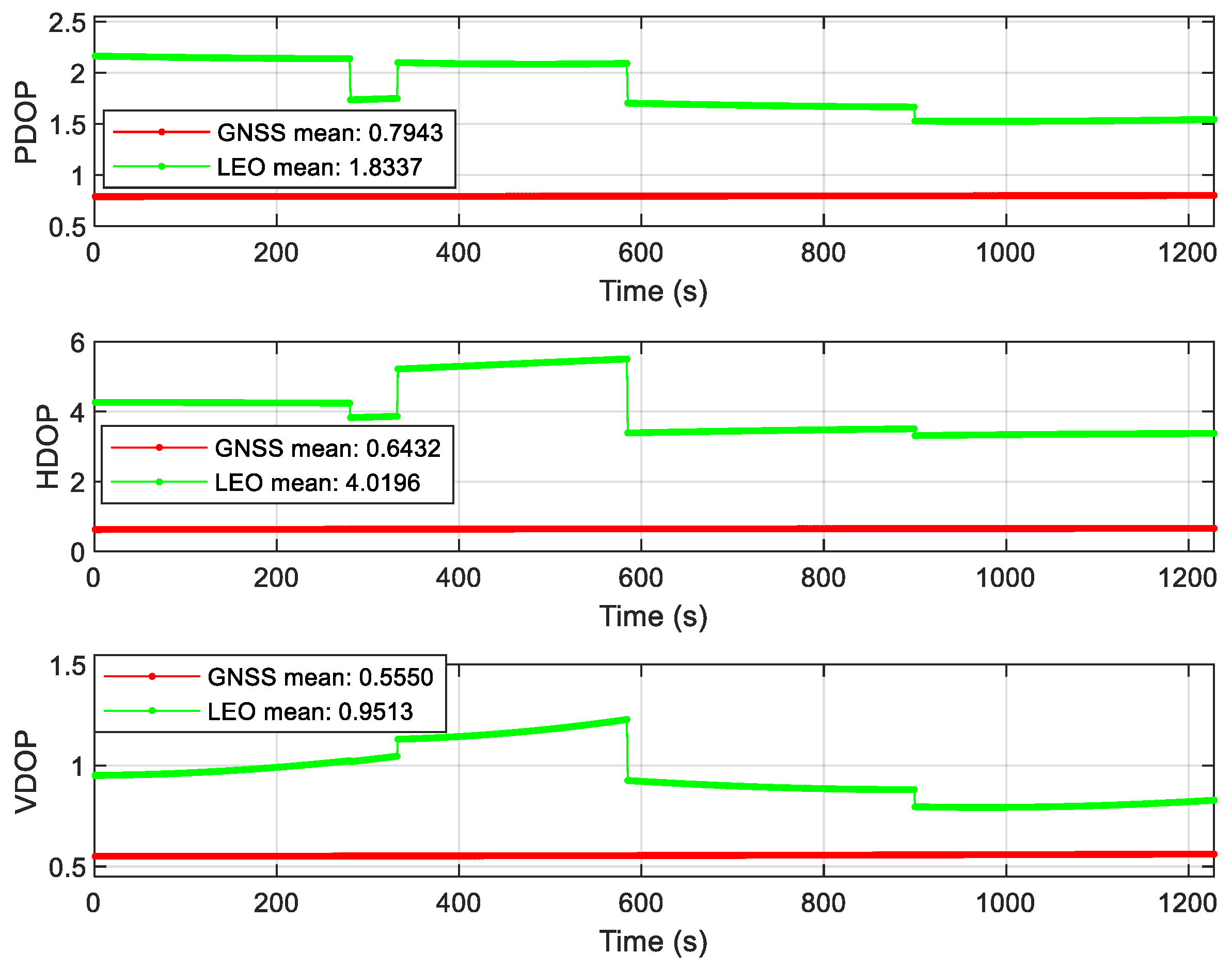
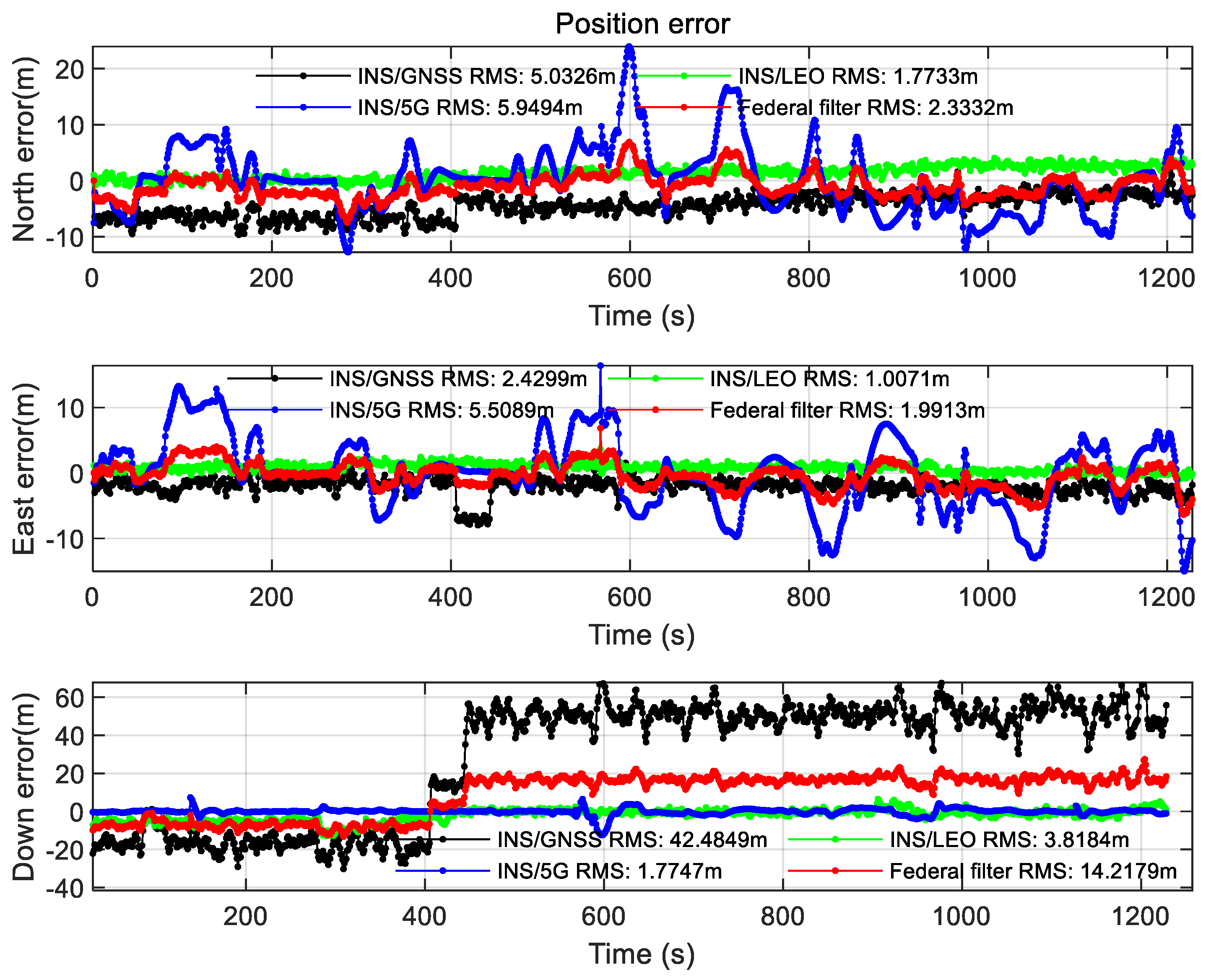
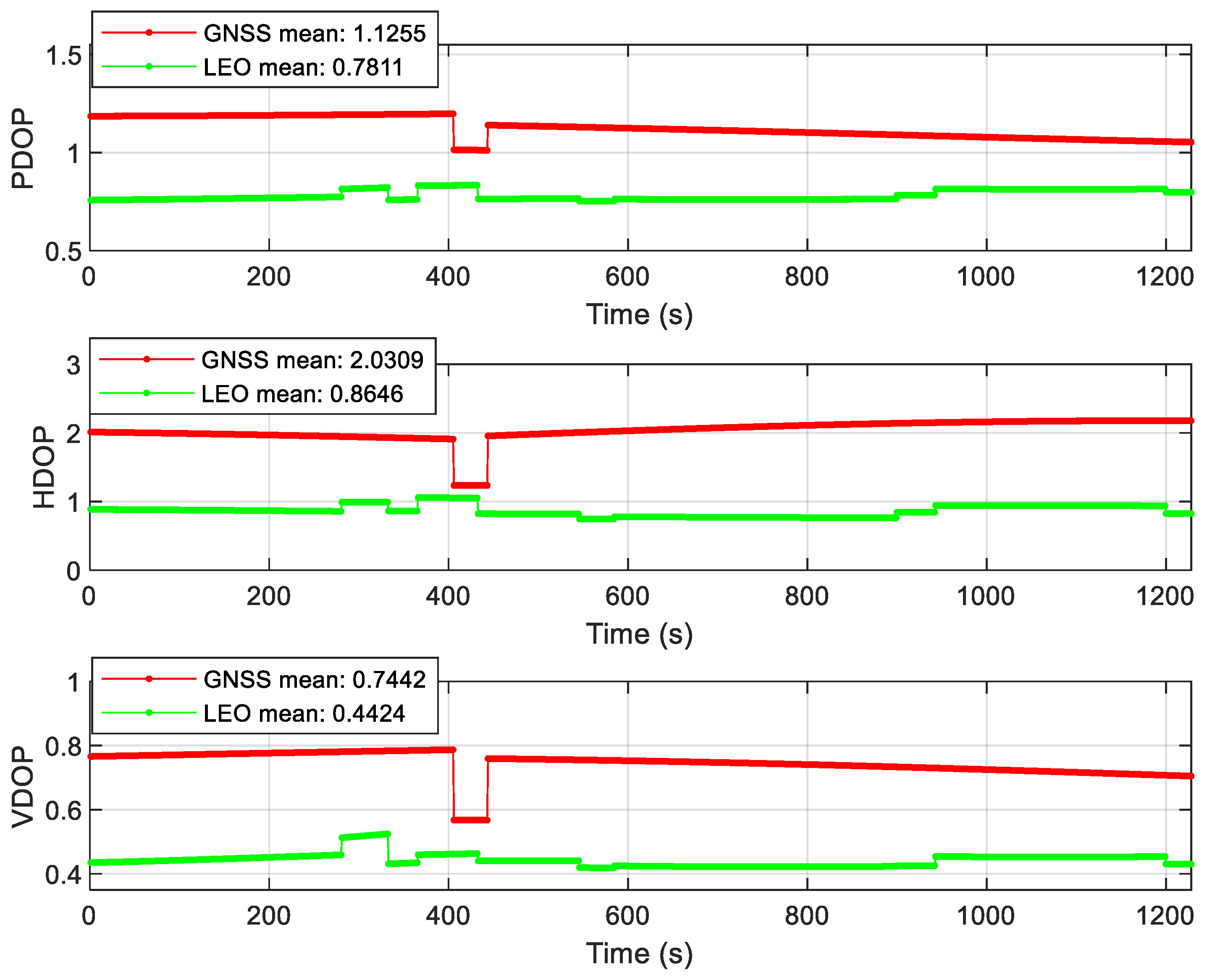
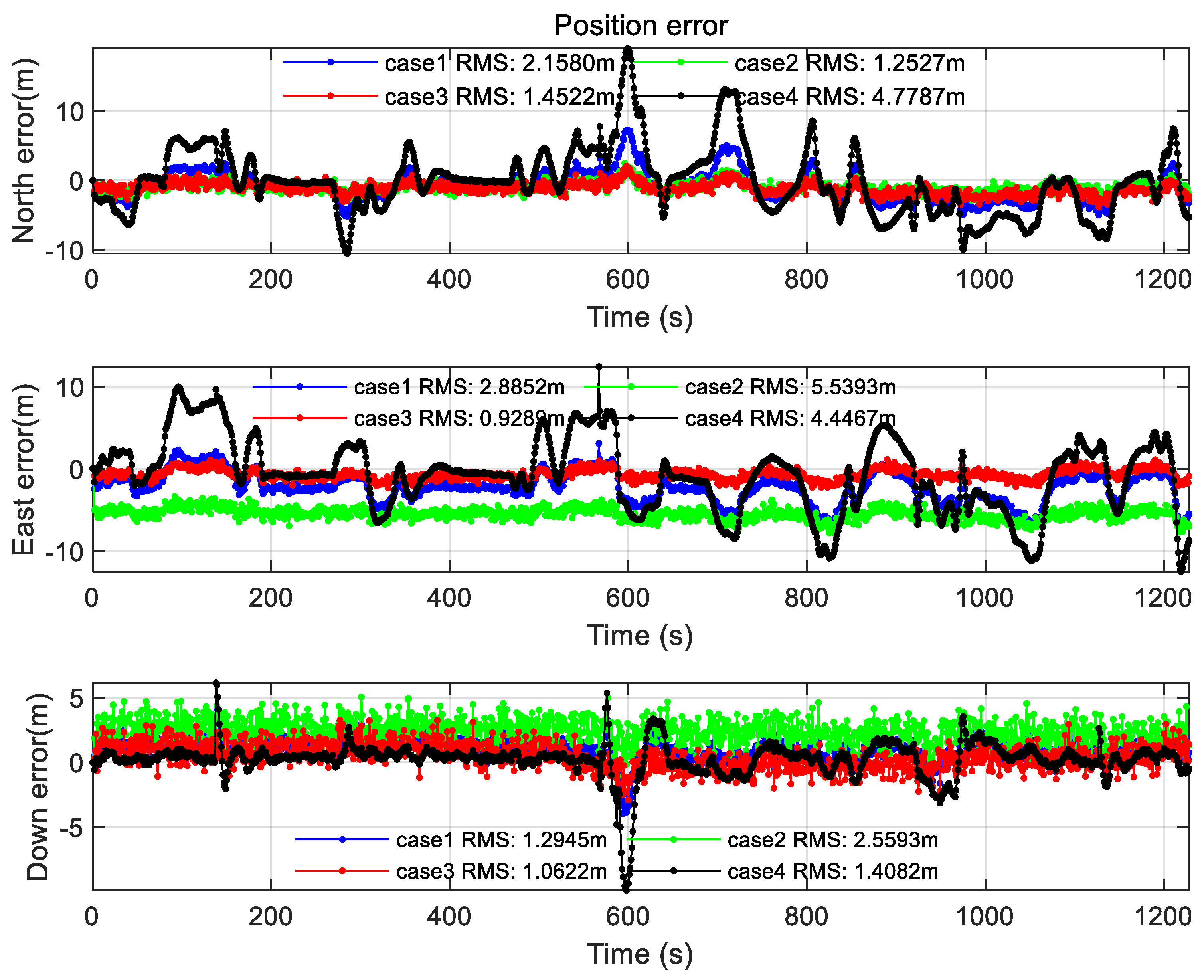
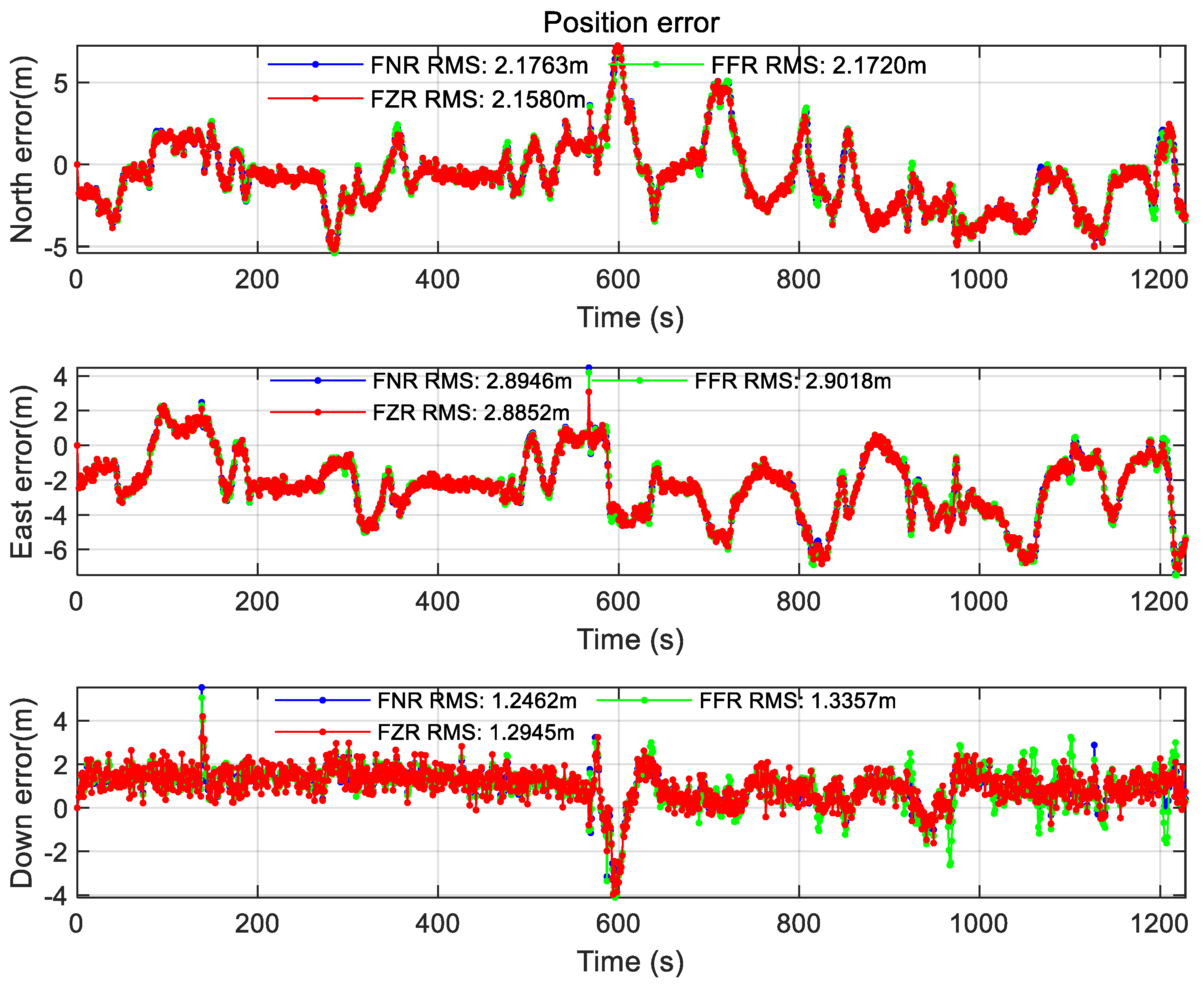
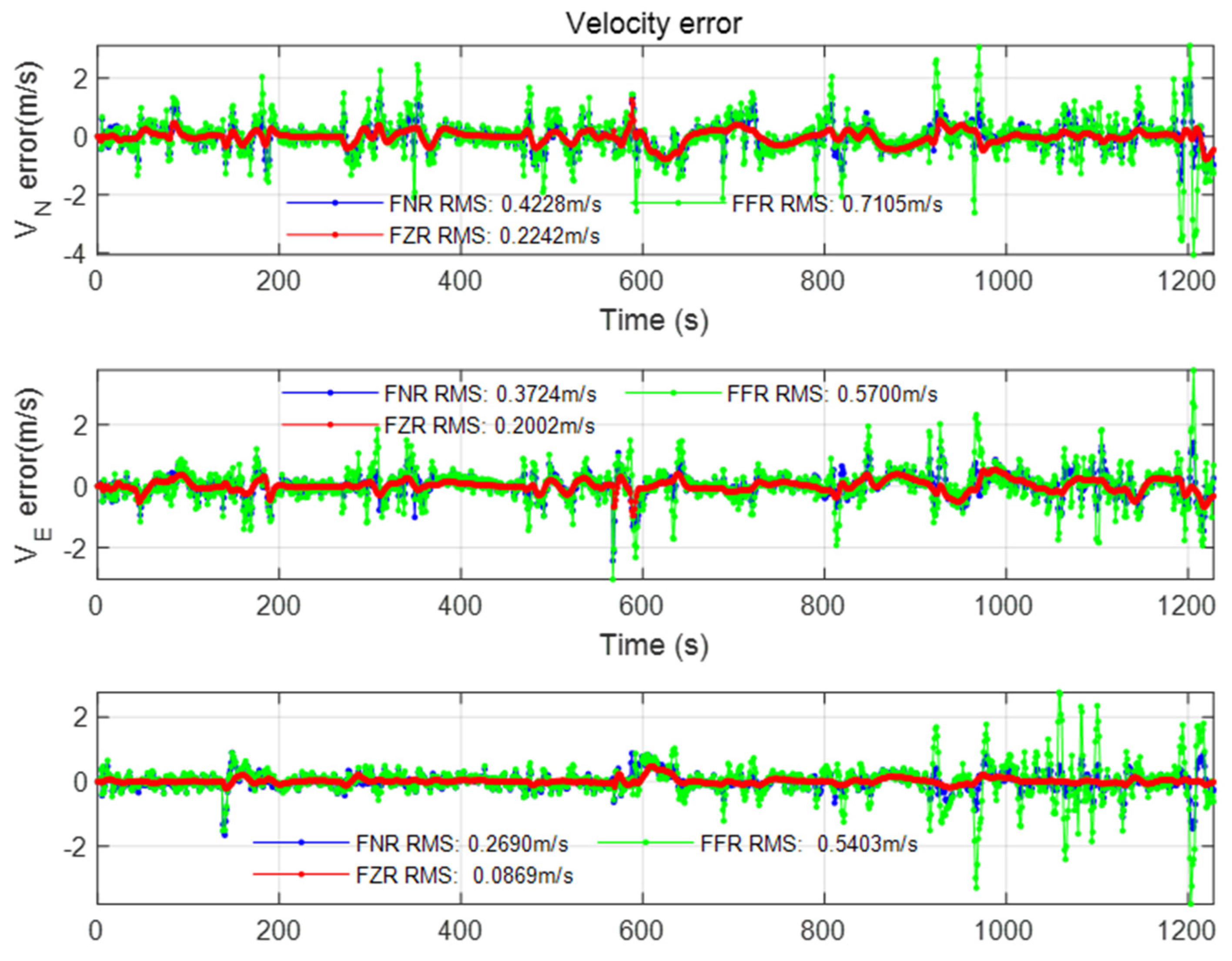
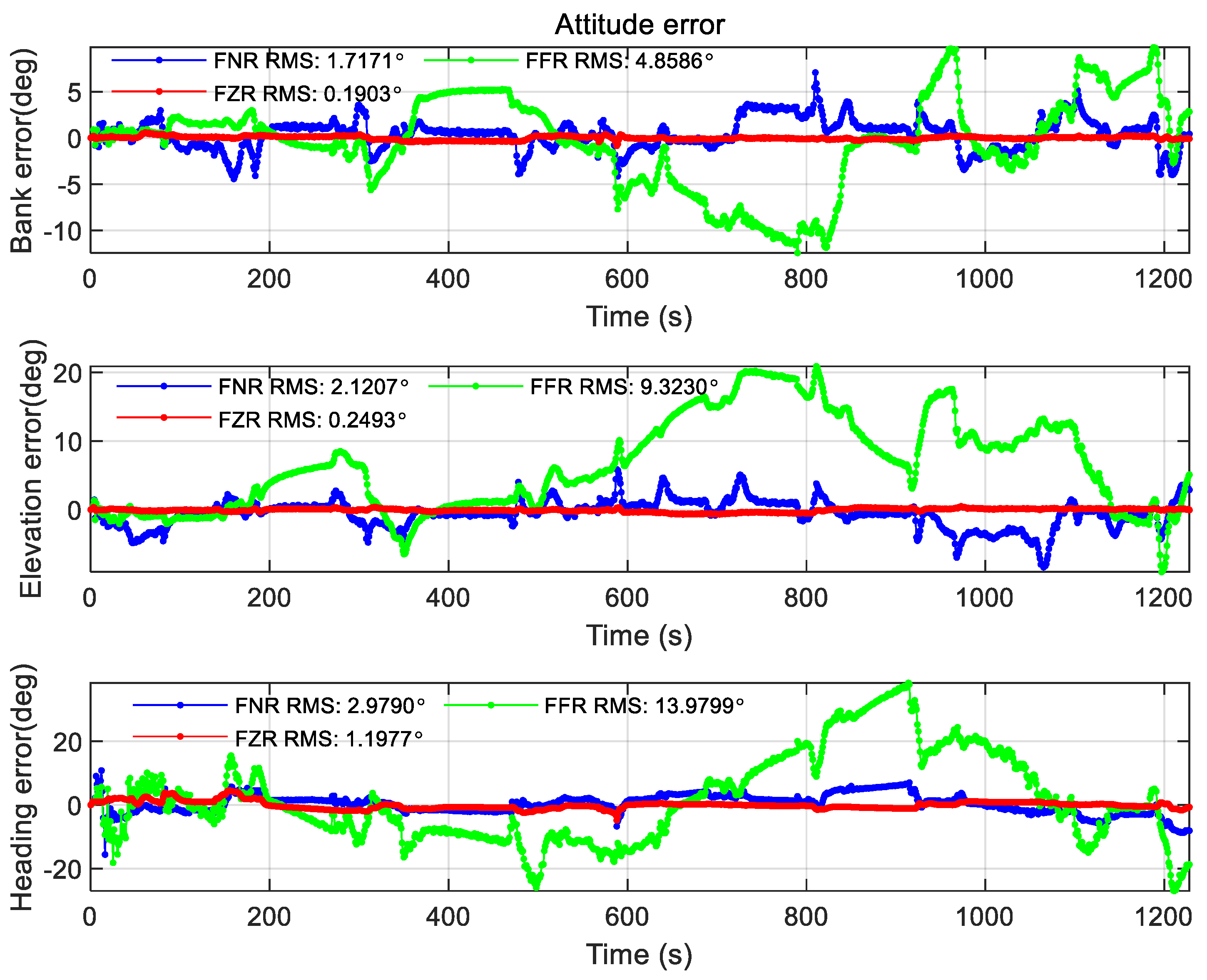
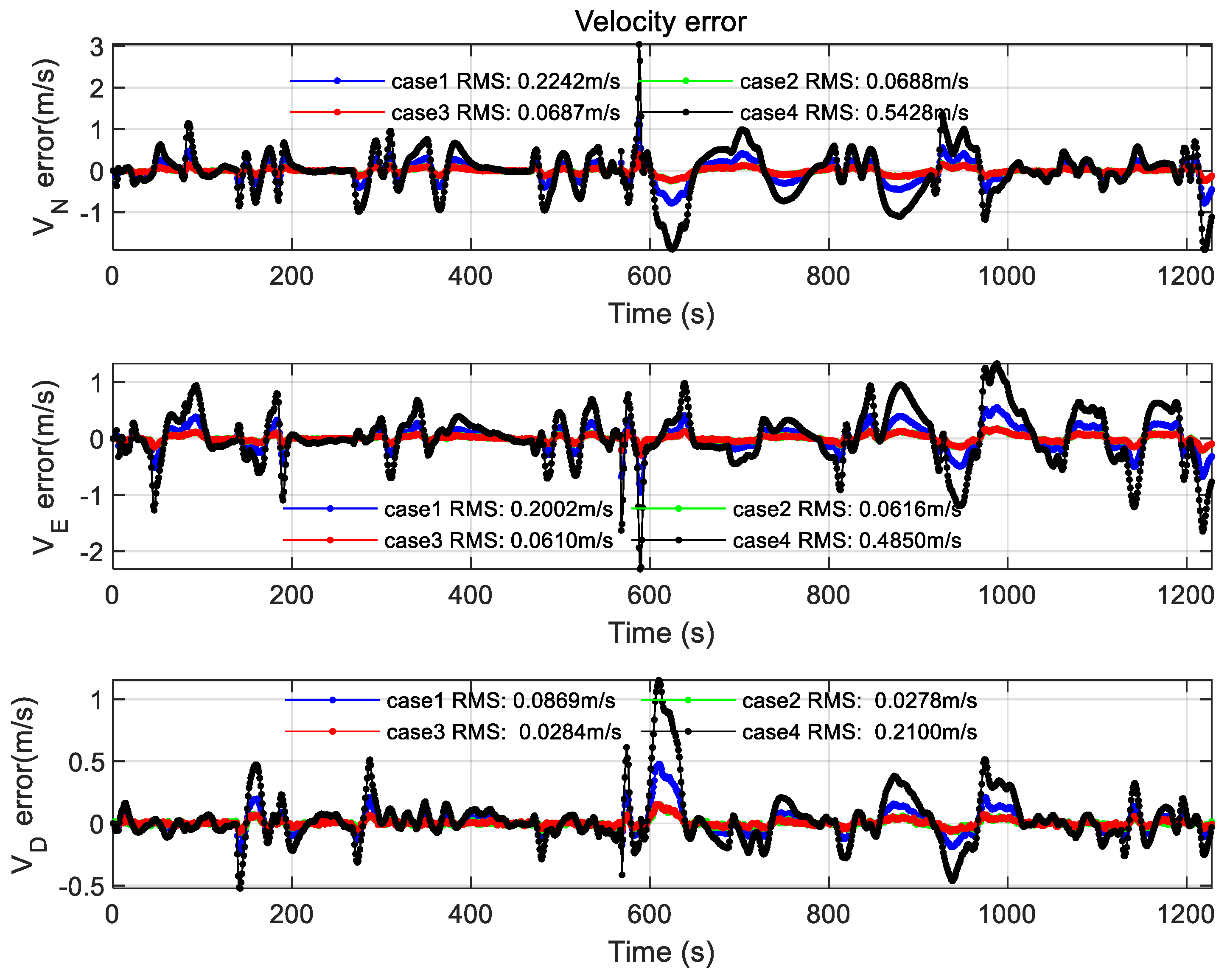
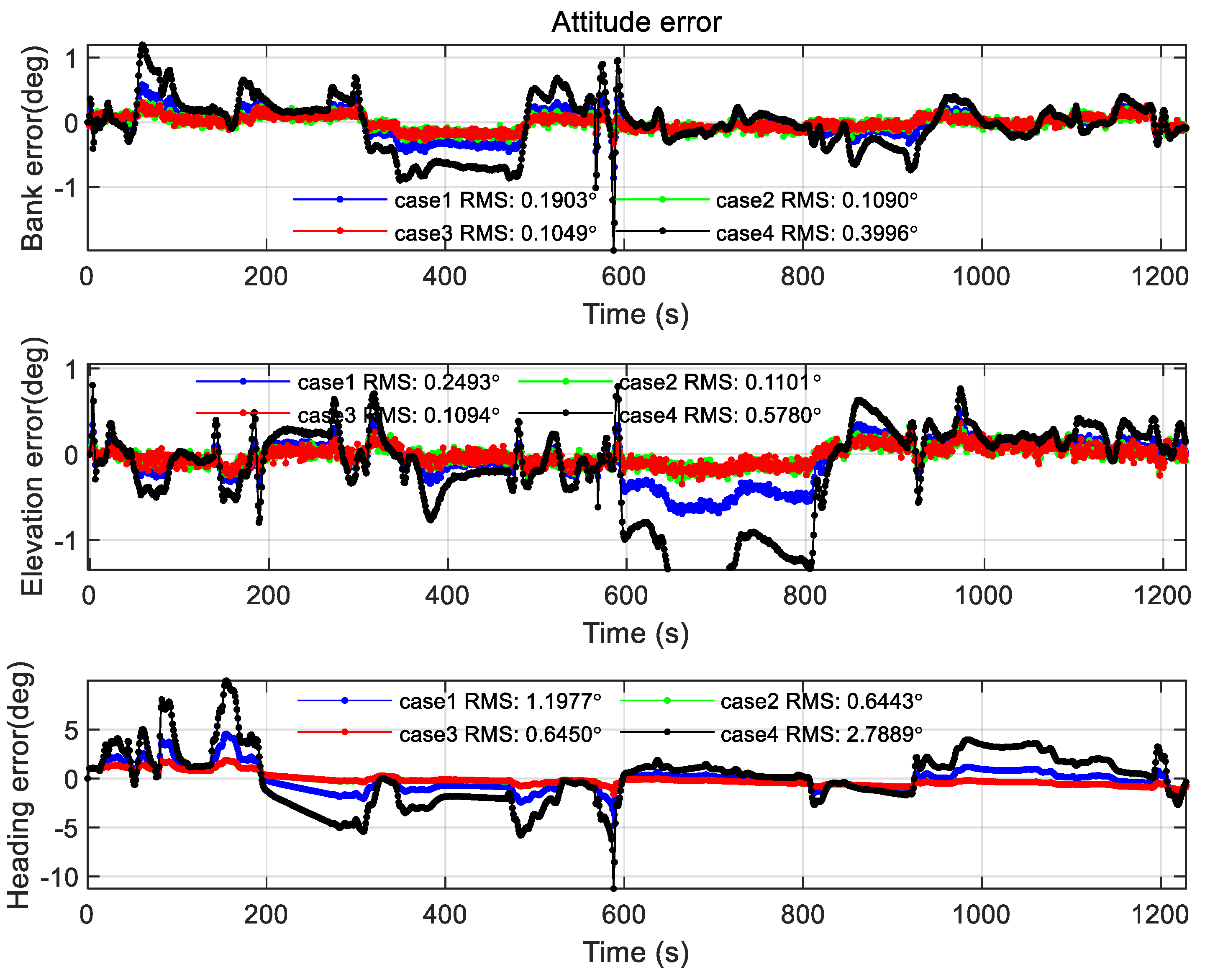
In this work, INS, GNSS, LEO, and 5G signal sources were simulated, and integrated navigation simulation experiments were carried out using tightly coupled and federated filtering algorithms. By setting the azimuth angle and the satellite visible altitude angle, the positioning results in four occlusion scenes, namely, Open scene, Semi-occluded scene, Surrounding occluded scene, and Headspace occluded scene, are compared. The main conclusions that the paper can support are as follows: (1) the experimental results show that, after adding the LEO constellation, the geometric configuration of the LEO constellation can significantly improve the accuracy factor, which provides strong support for the positioning effect of the Headspace occlusion scene, and improve the positioning accuracy of the original INS/GNSS by an order of magnitude; (2) after the addition of the 5G ranging signal, due to the uninterrupted characteristics of the 5G ranging signal, the overall positioning continuity of federated filtering was greatly improved; (3) by allocating different scale factors, the experiments show that the federated filtering algorithm can combine sensors with different precision for navigation and positioning, to adapt to the integrated navigation modes in different scenes, and open up a new idea for new sensor integrated navigation.
The future improvement of this paper lies in that this paper only tests the single point positioning mode with new LEO and 5G sensors based on INS/GNSS. In the future, we can study higher-precision positioning algorithms, including but not limited to RTK positioning and PPP positioning. The data used in LEO navigation and positioning in this paper is the satellite position and velocity obtained by simulating the satellite constellation, and there is no measured data source for verification. The simulation of 5G ranging signal only adopts pseudo-range measurement simulation with noise added based on theoretical value. There is no contrast experiment with the way of positioning by specifying positioning protocol in communication standard. The difference of positioning accuracy between the two ways has not been specified yet.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}