
SAR Image Ship Target Detection Adversarial Attack and Defence Generalization Research
Abstract
:1. Introduction
- What is the impact of protecting SAR ship models from attacks?
- How can stronger confrontation data be generated?
- Which attack form has the greatest impact on a SAR ship detection model?
- How does these model samples help the model improve the accuracy in the defence?
2. Related Work
2.1. Adversarial Attack
2.2. Gradient-Based Attack Methods
2.3. Adversarial Defence
2.4. SAR Image Noise
3. Materials and Methods
3.1. Defending SAR Ship Data (NAA)
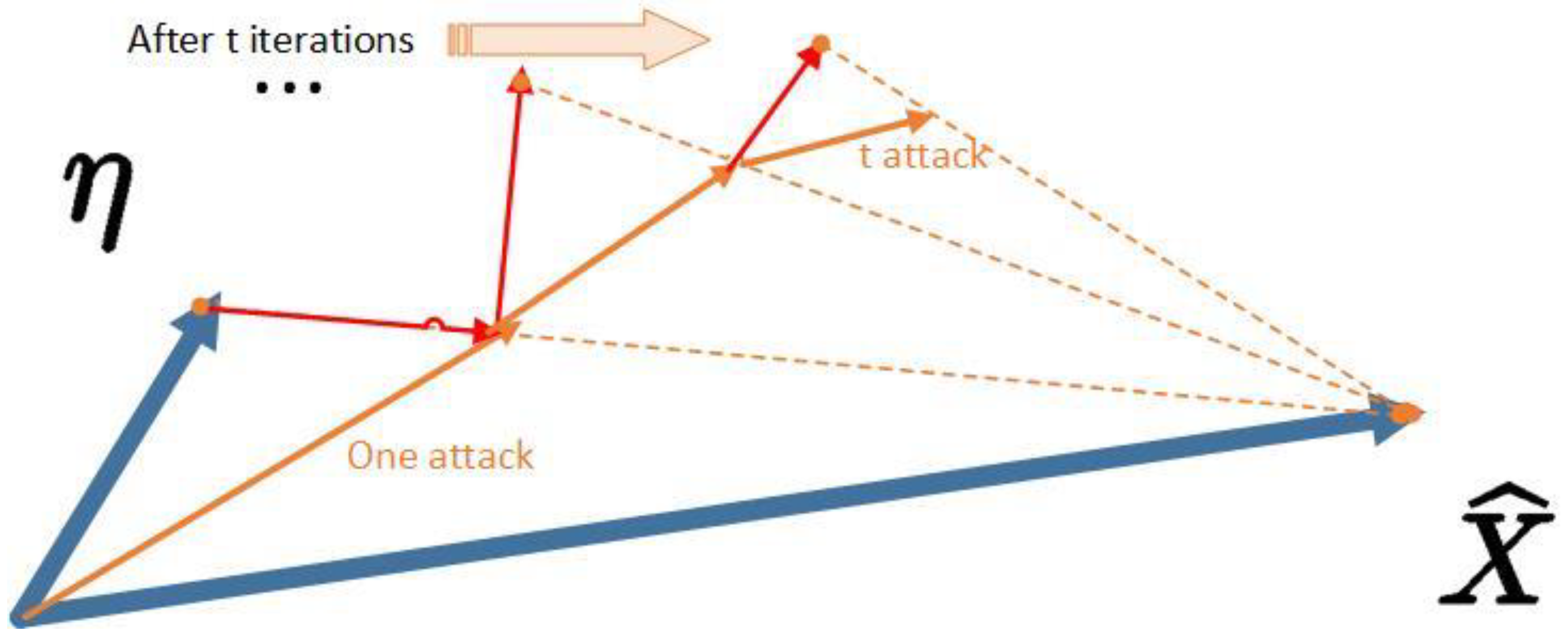
3.2. Sensitive Directional Estimation
3.3. Disturbance Signal Selection
3.4. Attack Noise
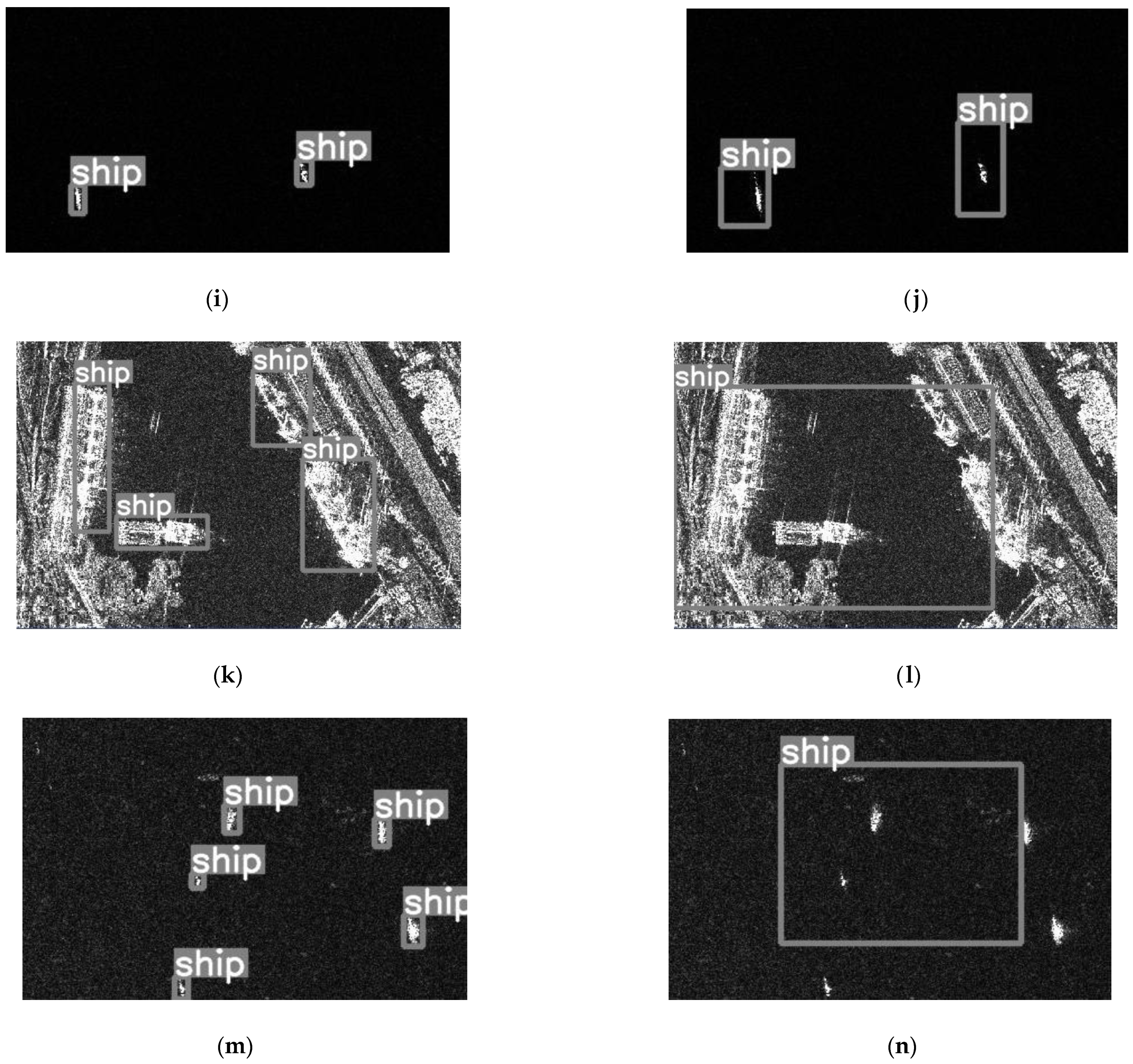
4. Results
5. Data Analysis
5.1. Attack Experiment
5.2. Defensive Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oliver, C.J. Understanding Synthetic Aperture Radar Images; Artech House: Boston, MA, USA; London, UK, 1998. [Google Scholar]
- Jackson, C.R.; Apel, J.R. Principles of Synthetic Aperture Radar. In Synthetic Aperture Radar: Marine User’s Manual, 1st ed.; Samuel, W., McCandless, A., Jr., Jackson, C.R., Eds.; NOAA: NOAA Central Library: Silver Spring, MD, USA, 2004; Volume 1, pp. 1–24. [Google Scholar]
- Intergovernmental Oceanographic Commission. Guide to Satellite Remote Sensing of the Marine Environment [OBSOLETE]; Intergovernmental Oceanographic Commission: Paris, France, 2021. [Google Scholar]
- Rani, M.; Masroor, M.; Kumar, P. Remote sensing of Ocean and coastal environment–overview. Remote Sens. Ocean. Coast. Environ. 2021, 2, 1–15. [Google Scholar]
- Special Issue “Remote Sensing Techniques in Marine Environment”. Available online: https://www.mdpi.com/journal/jmse/special_issues/wl_remote_sensing (accessed on 10 November 2022).
- Bayındır, C.; Frost, J.D.; Barnes, C.F. Assessment and enhancement of sar noncoherent change detection of sea-surface oil spills. IEEE J. Ocean. Eng. 2017, 43, 211–220. [Google Scholar] [CrossRef]
- Kavanaugh, M.T.; Bell, T.; Catlett, D.; Cimino, M.A.; Doney, S.C.; Klajbor, W.; Messié, M.; Montes, E.; Muller-Karger, F.E.; Otis, D.; et al. Satellite Remote Sensing and the Marine Biodiversity Observation Network. Oceanography 2021, 34, 62–79. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems 28; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: New York, NY, USA, 2015; pp. 91–99. [Google Scholar]
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.; Fergus, R. Intriguing properties of neural networks. arXiv 2013, arXiv:1312.6199. [Google Scholar]
- Samanta, S.; Mehta, S. Towards crafting text adversarial samples. arXiv 2021, arXiv:1707.02812. [Google Scholar]
- Goodfellow, I.J.; Shlens, J.; Szegedy, C. Explaining and harnessing adversarial examples. arXiv 2014, arXiv:1412.6572. [Google Scholar]
- Sarkar, S.; Bansal, A.; Mahbub, U.; Chellappa, R. UPSET and ANGRI: Breaking high performance image classifiers. arXiv 2021, arXiv:1707.01159. [Google Scholar]
- Chen, P.Y.; Zhang, H.; Sharma, Y.; Yi, J.; Hsieh, C.J. ZOO: Zeroth order optimization based black-box attacks to deep neural networks without training substitute models. In Proceedings of the 10th ACM Workshop on Artificial Intelligence and Security, Dallas, TX, USA, 3 November 2017; ACM: New York, NY, USA, 2017; pp. 15–26. [Google Scholar]
- Wang, M.; Wang, H.; Wang, L. Adversarial Examples Generation And Attack On SAR Image Classification. In Proceedings of the 2021 5th International Conference on Innovation in Artificial Intelligence, Xiamen, China, 5–8 March 2021. [Google Scholar]
- Kurakin, A.; Goodfellow, I.J.; Bengio, S. Adversarial examples in the physical world. In Artificial Intelligence Safety and Security; Chapman and Hall/CRC: Boca Raton, FL, USA, 2018; pp. 99–112. [Google Scholar]
- Dong, Y.; Pang, T.; Su, H.; Zhu, J. Evading defenses to transferable adversarial examples by translation-invariant attacks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4312–4321. [Google Scholar]
- Lin, J.; Song, C.; He, K.; Wang, L.; Hopcroft, J.E. Nesterov accelerated gradient and scale invariance for adversarial attacks. arXiv 2019, arXiv:1908.06281. [Google Scholar]
- Nesterov, Y. A method for unconstrained convex minimization problem with the rate of convergence o(1/k^2). Sov. Math. Dokl. 1983, 269, 543–547. [Google Scholar]
- Madry, A.; Makelov, A.; Schmidt, L.; Tsipras, D.; Vladu, A. Towards deep learning models resistant to adversarial attacks. arXiv 2017, arXiv:1706.06083. [Google Scholar]
- Kurakin, A.; Goodfellow, I.; Bengio, S. Adversarial machine learning at scale. arXiv 2016, arXiv:1611.01236. [Google Scholar]
- Tramèr, F.; Kurakin, A.; Papernot, N.; Goodfellow, I.; Boneh, D.; McDaniel, P. Ensemble adversarial training: Attacks and defenses. arXiv 2017, arXiv:1705.07204. [Google Scholar]
- Papernot, N.; McDaniel, P.; Wu, X.; Jha, S.; Swami, A. Distillation as a defense to adversarial perturbations against deep neural networks. In Proceedings of the 2016 IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2016; pp. 582–597. [Google Scholar]
- Jia, X.; Wei, X.; Cao, X.; Foroosh, H. ComDefend: An efficient image compression model to defend adversarial examples. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6077–6085. [Google Scholar]
- Liu, Z.; Liu, Q.; Liu, T.; Xu, N.; Lin, X.; Wang, Y.; Wen, W. Feature distillation: DNN-oriented JPEG compression against adversarial examples. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 860–868. [Google Scholar]
- Qiu, H.; Zeng, Y.; Zheng, Q.; Guo, S.; Zhang, T.; Li, H. An efficient preprocessing-based approach to mitigate advanced adversarial attacks. IEEE Trans. Comput. 2021. [Google Scholar] [CrossRef]
- Moosavi-Dezfooli, S.M.; Fawzi, A.; Frossard, P. Deepfool: A simple and accurate method to fool deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–July 1 2016. [Google Scholar]
- Torres, L.; Sant’Anna, S.J.S.; da Costa Freitas, C.; Frery, A.C. Speckle reduction in polarimetric SAR imagery with stochastic distances and nonlocal means. Pattern Recognit. 2014, 47, 141–157. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Liu, B.; Li, B.; Guo, W.; Yu, W.; Zhang, Z.; Yu, W. OpenSARShip: A dataset dedicated to sentinel-1 ship interpretation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 195–208. [Google Scholar] [CrossRef]
- Li, B.; Liu, B.; Huang, L.; Guo, W.; Zhang, Z.; Yu, W. OpenSARShip 2.0: A large-volume dataset for deeper interpretation of ship targets in sentinel-1 imagery. In Proceedings of the 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Beijing, China, 13–14 November 2017; pp. 1–5. [Google Scholar]
- Li, J.; Qu, C.; Shao, J. Ship detection in SAR images based on an improved faster R-CNN. In Proceedings of the 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Beijing, China, 13–14 November 2017; pp. 1–6. [Google Scholar]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR dataset of ship detection for deep learning under complex backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef] [Green Version]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A high-resolution SAR images dataset for ship detection and instance segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Li, J.; Xu, X.; Wang, B.; Zhan, X.; Xu, Y.; Ke, X.; Zeng, T.; Su, H.; et al. SAR Ship Detection Dataset (SSDD): Official release and comprehensive data analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X.; Zhan, X.; Shi, J.; Wei, S.; Pan, D.; Li, J.; Su, H.; Zhou, Y.; et al. LS-SSDD-v1.0: A Deep Learning Dataset Dedicated to Small Ship Detection from Large-Scale Sentinel-1 SAR Images. Remote Sens. 2020, 12, 2997. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. HyperLi-Net: A hyper-light deep learning network for high-accurate and high-speed ship detection from synthetic aperture radar imagery. ISPRS J. Photogramm. Remote Sens. 2020, 167, 123–153. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. ShipDeNet-20: An only 20 convolution layers and< 1-MB lightweight SAR ship detector. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1234–1238. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. High-speed ship detection in SAR images based on a grid convolutional neural network. Remote Sens. 2019, 11, 1206. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Shi, J.; Wei, S. Depthwise Separable Convolution Neural Network for High-Speed SAR Ship Detection. Remote Sens. 2019, 11, 2483. [Google Scholar] [CrossRef] [Green Version]
- Special Issue “Evaluating Object Detection Models Using Mean Average Precision (mAP)”. Available online: https://blog.paperspace.com/mean-average-precision/ (accessed on 20 January 2023).




{kind=link}
{kind=link}
{kind=link}
| Attack | Precision | Recall | Success Rate | mAP |
|---|---|---|---|---|
| Original | 97.02 | 97.62 | 0 | 97.88 |
| Random Noise | 93.12 | 93.36 | 6.2 | 93.58 |
| FGSM | 18.65 | 19.12 | 79.23 | 19.21 |
| AdvGAN | 16.53 | 17.12 | 80.18 | 17.32 |
| SI-NI | 15.52 | 15.68 | 82.69 | 16.12 |
| TIM | 14.32 | 14.65 | 84.76 | 14.87 |
| NAA | 11.27 | 11.83 | 82.5 | 11.86 |
| Attack | Precision | Recall | mAP |
|---|---|---|---|
| FGSM | 95.28 | 95.72 | 95.94 |
| SI-NI | 95.87 | 96.28 | 96.42 |
| NAA | 96.21 | 96.71 | 96.82 |
| Attack | Precision | Recall | mAP |
|---|---|---|---|
| FGSM | 12.12 | 12.23 | 12.36 |
| SI-NI | 10.21 | 10.52 | 10.72 |
| NAA | 5.69 | 5.95 | 6.42 |
| Attack | Precision | Recall | mAP |
|---|---|---|---|
| Original | 78.62 | 78.82 | 79.02 |
| Attack | Precision | Recall | mAP |
|---|---|---|---|
| FGSM | 78.63 | 78.83 | 79.03 |
| SI-NI | 79.17 | 79.24 | 79.23 |
| NAA | 83.52 | 83.36 | 84.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, W.; Liu, Y.; Zeng, Y.; Liu, Q.; Li, Q. SAR Image Ship Target Detection Adversarial Attack and Defence Generalization Research. Sensors 2023, 23, 2266. https://doi.org/10.3390/s23042266
Gao W, Liu Y, Zeng Y, Liu Q, Li Q. SAR Image Ship Target Detection Adversarial Attack and Defence Generalization Research. Sensors. 2023; 23(4):2266. https://doi.org/10.3390/s23042266
Chicago/Turabian StyleGao, Wei, Yunqing Liu, Yi Zeng, Quanyang Liu, and Qi Li. 2023. "SAR Image Ship Target Detection Adversarial Attack and Defence Generalization Research" Sensors 23, no. 4: 2266. https://doi.org/10.3390/s23042266