
Static and Dynamic Multiparameter Assessment of Structural Elements Using Chirped Fiber Bragg Gratings

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
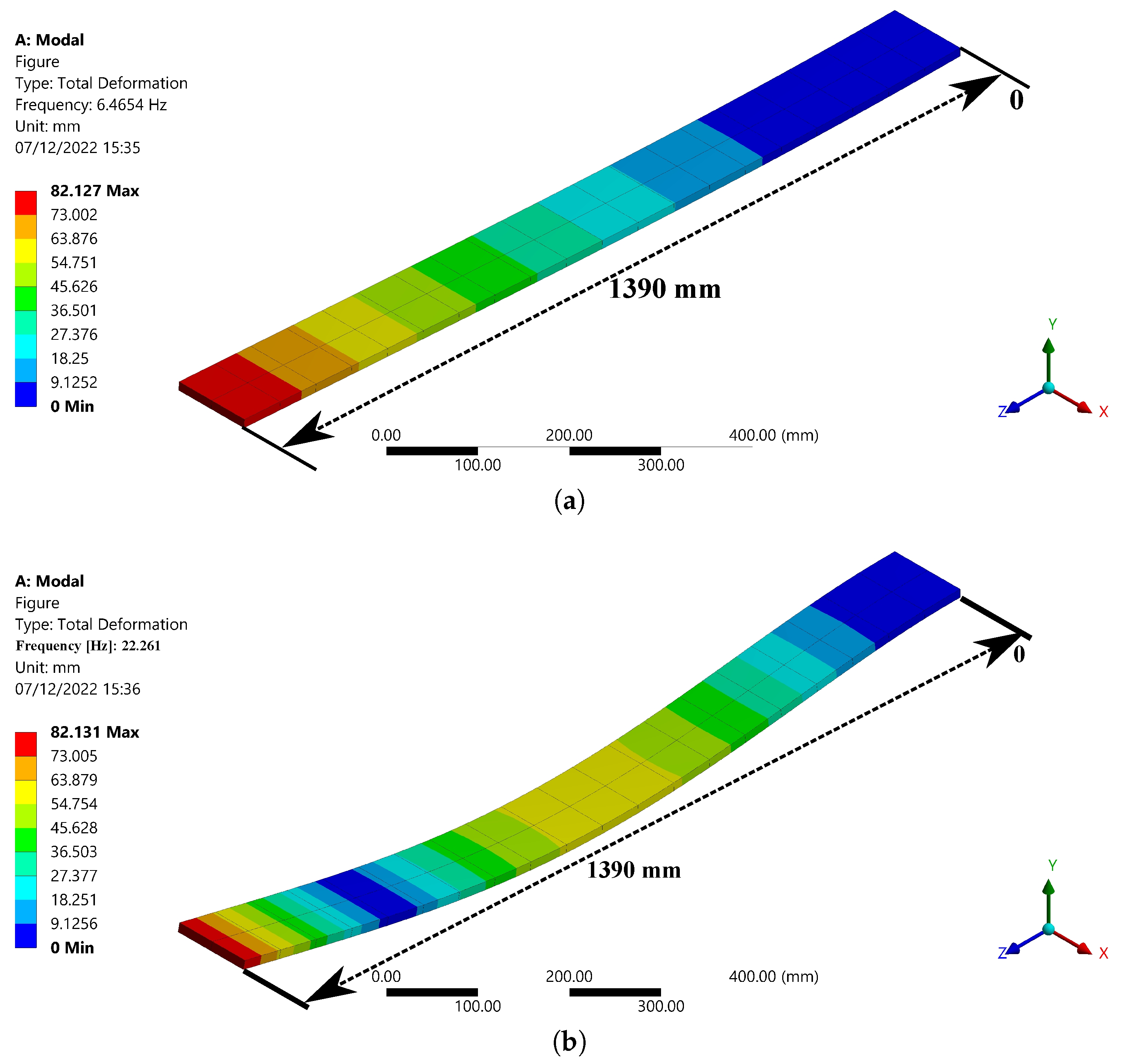
2.1. Simulations
2.2. Experimental Setup
3. Results and Discussion
3.1. Simulation Results
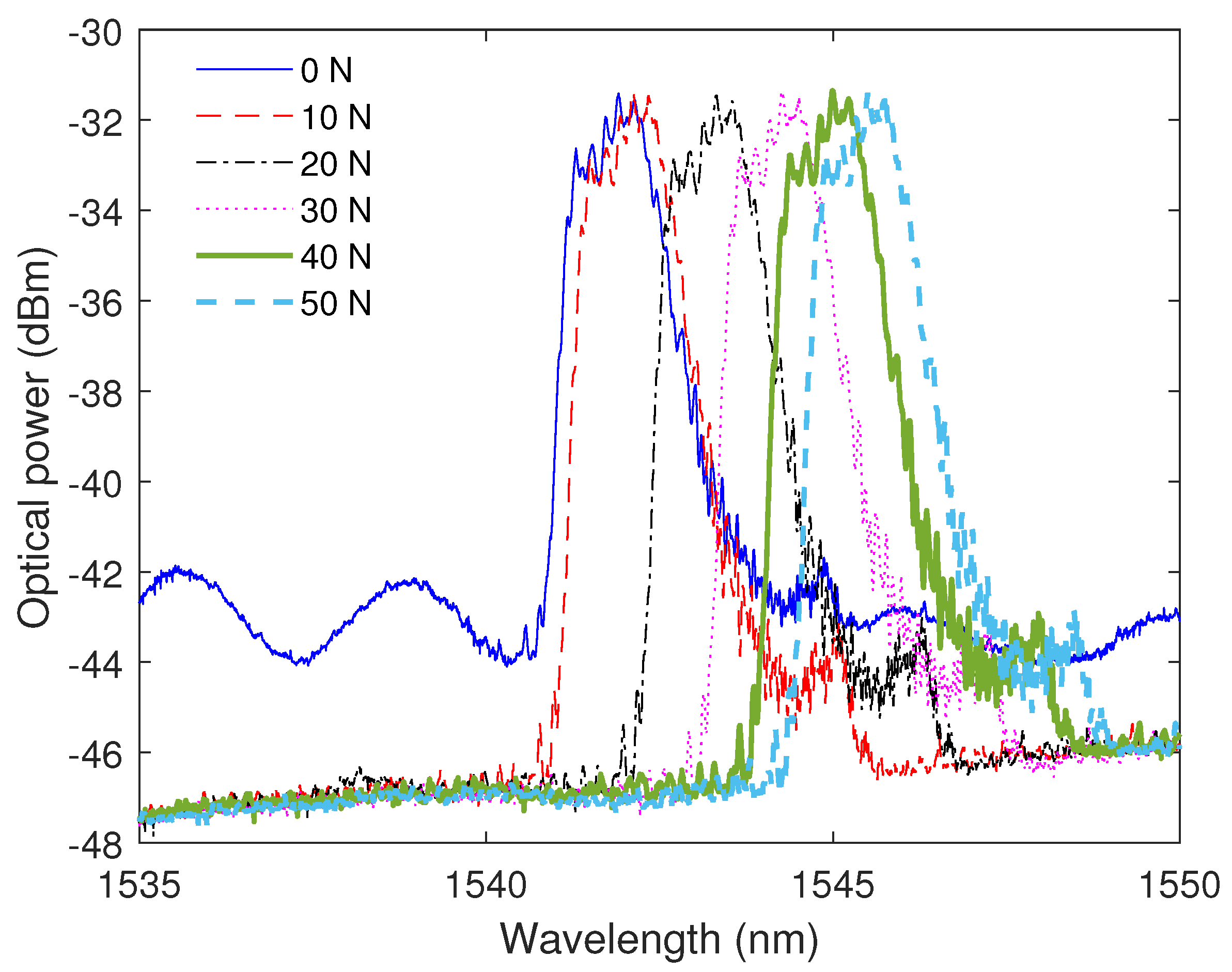
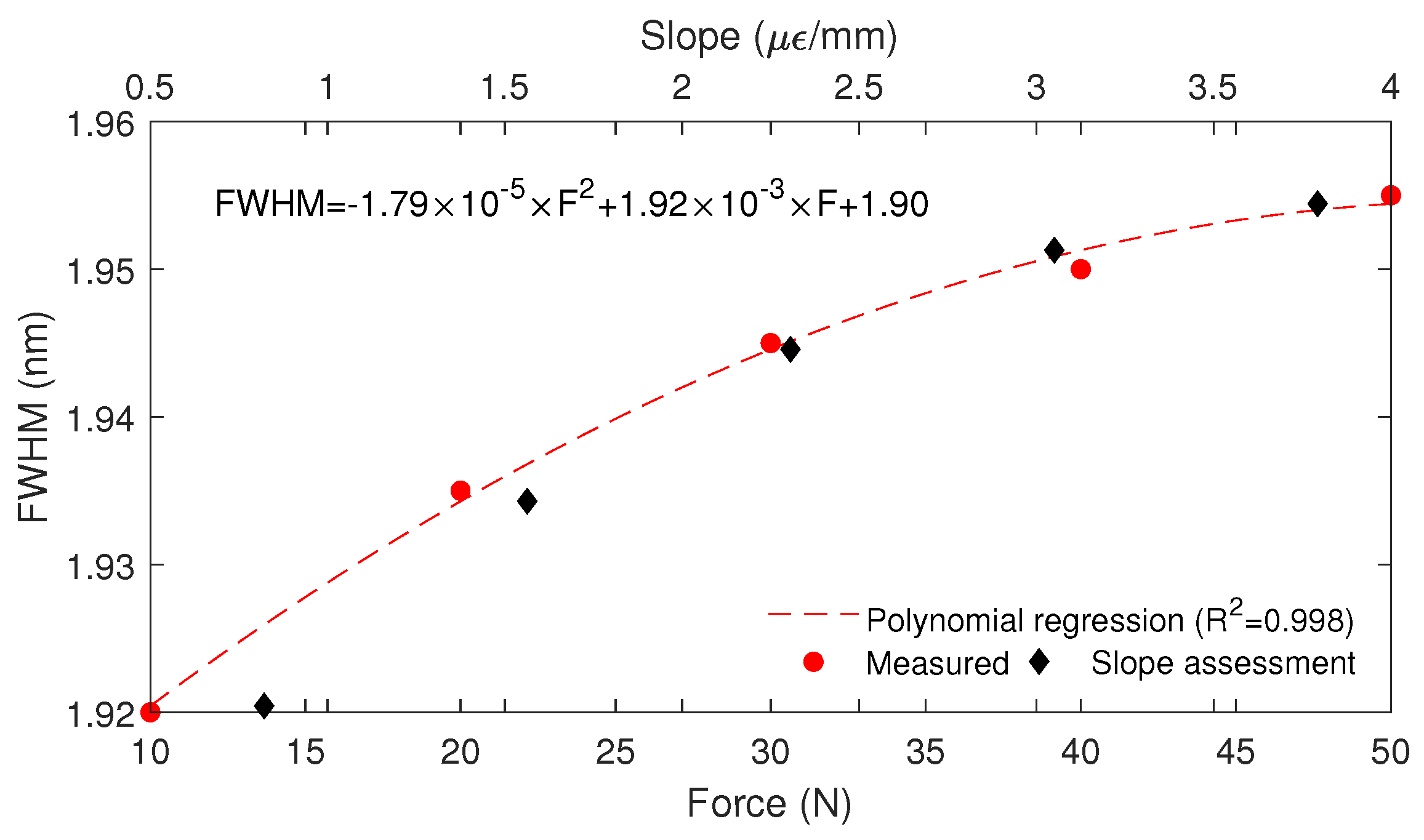
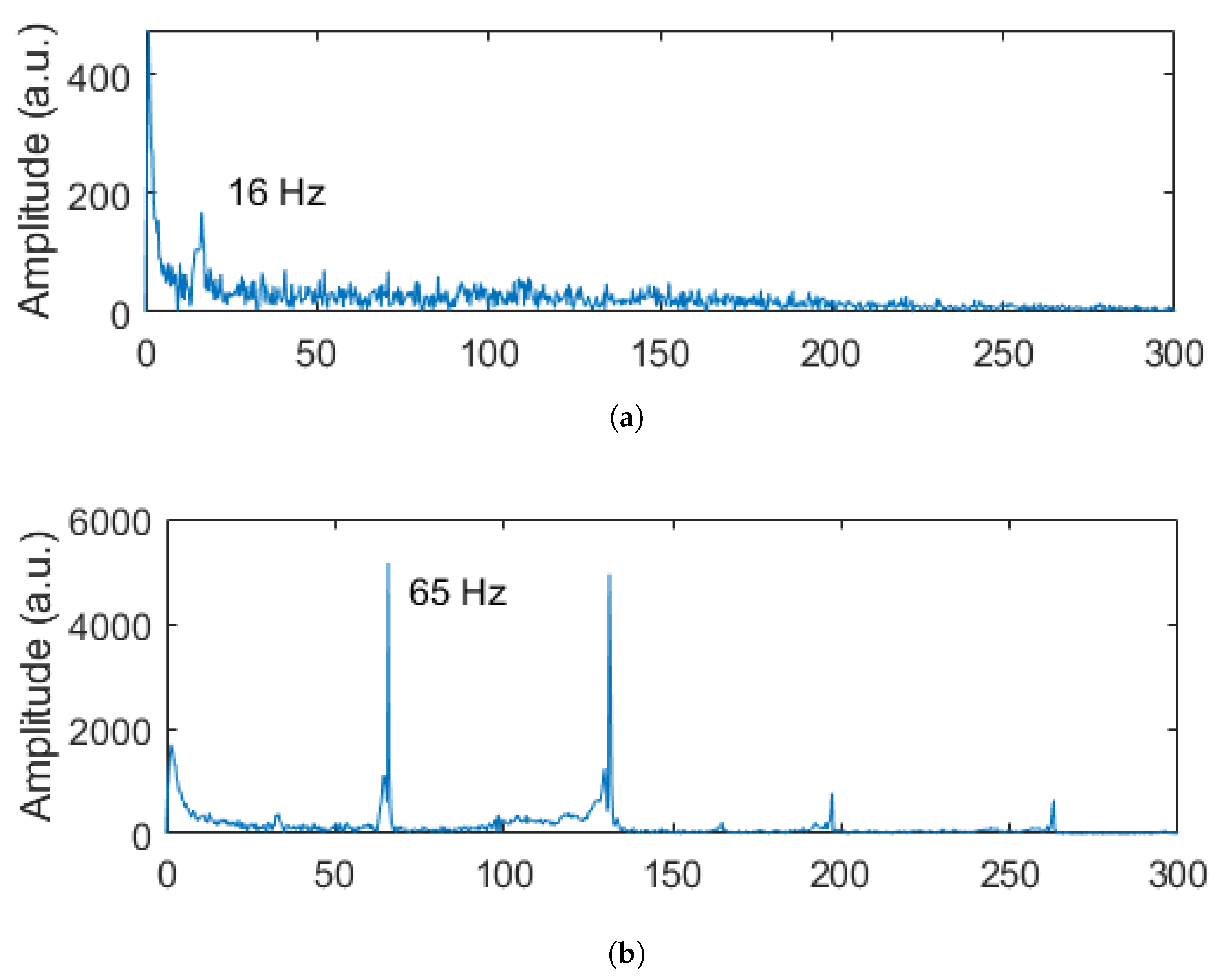
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mishra, M.; Lourenço, P.B.; Ramana, G. Structural health monitoring of civil engineering structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Qarib, H.; Adeli, H. Recent advances in health monitoring of civil structures. Sci. Iran. 2014, 21, 1733–1742. [Google Scholar]
- Malekloo, A.; Ozer, E.; AlHamaydeh, M.; Girolami, M. Machine learning and structural health monitoring overview with emerging technology and high-dimensional data source highlights. Struct. Health Monit. 2022, 21, 1906–1955. [Google Scholar] [CrossRef]
- Leng, J.; Asundi, A. Structural health monitoring of smart composite materials by using EFPI and FBG sensors. Sens. Actuators A Phys. 2003, 103, 330–340. [Google Scholar]
- Javadinasab Hormozabad, S.; Gutierrez Soto, M.; Adeli, H. Integrating structural control, health monitoring, and energy harvesting for smart cities. Expert Syst. 2021, 38, e12845. [Google Scholar]
- Mohapatra, A.G.; Khanna, A.; Gupta, D.; Mohanty, M.; de Albuquerque, V.H.C. An experimental approach to evaluate machine learning models for the estimation of load distribution on suspension bridge using FBG sensors and IoT. Comput. Intell. 2022, 38, 747–769. [Google Scholar] [CrossRef]
- Zhaobo, Z.; Sheng, L.; Yibo, W.; Hongnan, L. Structural health monitoring for bridge crane based on low temperature-sensitivity FBG sensors. Front. Phys. 2021, 9, 346. [Google Scholar]
- Mohapatra, A.G.; Talukdar, J.; Mishra, T.C.; Anand, S.; Jaiswal, A.; Khanna, A.; Gupta, D. Fiber Bragg grating sensors driven structural health monitoring by using multimedia-enabled iot and big data technology. Multimed. Tools Appl. 2022, 81, 34573–34593. [Google Scholar]
- Fan, Y.; Kahrizi, M. Characterization of a FBG strain gage array embedded in composite structure. Sens. Actuators A Phys. 2005, 121, 297–305. [Google Scholar]
- Kalenik, J.; Pająk, R. A cantilever optical-fiber accelerometer. Sens. Actuators A Phys. 1998, 68, 350–355. [Google Scholar]
- Moyo, P.; Brownjohn, J.M.; Suresh, R.; Tjin, S.C. Development of fiber Bragg grating sensors for monitoring civil infrastructure. Eng. Struct. 2005, 27, 1828–1834. [Google Scholar]
- Lin, Y.B.; Pan, C.L.; Kuo, Y.H.; Chang, K.C.; Chern, J.C. Online monitoring of highway bridge construction using fiber Bragg grating sensors. Smart Mater. Struct. 2005, 14, 1075. [Google Scholar]
- Jiang, L.; Yu, D.; Gao, H.; Xu, D.; Wang, B.; Qiao, X. A Fiber Bragg Grating accelerometer with cantilever beam. Opt. Fiber Technol. 2022, 74, 103088. [Google Scholar]
- Wu, M.; Hong, L.; Li, Y. A Novel Optical Accelerometer Based on Slant-Ended Fiber. IEEE Sens. J. 2022, 22, 11673–11681. [Google Scholar] [CrossRef]
- Kadokura, M.; Yamazaki, H.; Kasai, T.; Watanabe, K.; Nishiyama, M. Sensitivity Enhancement of a Semicircular Curved Hetero-Core Optical Fiber Accelerometer with Low Cross-Axis Sensitivity. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Amorebieta, J.; Ortega-Gomez, A.; Durana, G.; Fernández, R.; Antonio-Lopez, E.; Schülzgen, A.; Zubia, J.; Amezcua-Correa, R.; Villatoro, J. Highly sensitive multicore fiber accelerometer for low frequency vibration sensing. Sci. Rep. 2020, 10, 16180. [Google Scholar]
- Fan, W.; Duan, L.; Gao, H.; Liu, Q.; Qiao, X. Low Cross Sensitivity and Temperature Compensation Fiber Bragg Grating Accelerometer Based on Miniature Slide Rail. IEEE Sens. J. 2022, 22, 16912–16919. [Google Scholar]
- Fan, W.; Zhou, R.; Li, H.; Yu, D.; Qiao, X. Low-frequency temperature compensation fiber Bragg grating accelerometer based on double-arched beam. Opt. Commun. 2023, 528, 129058. [Google Scholar]
- Leal-Junior, A.G.; Marques, C. Diaphragm-Embedded Optical Fiber Sensors: A Review and Tutorial. IEEE Sens. J. 2021, 21, 12719–12733. [Google Scholar]
- Othonos, A.; Kalli, K.; Kohnke, G.E. Fiber Bragg gratings: Fundamentals and applications in telecommunications and sensing. Phys. Today 2000, 53, 61. [Google Scholar] [CrossRef]
- Tosi, D. Review of chirped fiber Bragg grating (CFBG) fiber-optic sensors and their applications. Sensors 2018, 18, 2147. [Google Scholar] [PubMed]
- Min, R.; Ortega, B.; Marques, C. Fabrication of tunable chirped mPOF Bragg gratings using a uniform phase mask. Opt. Express 2018, 26, 4411–4420. [Google Scholar] [PubMed]
- Marques, C.; Antunes, P.; Mergo, P.; Webb, D.J.; Andre, P. Chirped Bragg gratings in PMMA step-index polymer optical fiber. IEEE Photonics Technol. Lett. 2017, 29, 500–503. [Google Scholar]
- Korganbayev, S.; Orazayev, Y.; Sovetov, S.; Bazyl, A.; Schena, E.; Massaroni, C.; Gassino, R.; Vallan, A.; Perrone, G.; Saccomandi, P.; et al. Detection of thermal gradients through fiber-optic Chirped Fiber Bragg Grating (CFBG): Medical thermal ablation scenario. Opt. Fiber Technol. 2018, 41, 48–55. [Google Scholar]
- Ayupova, T.; Shaimerdenova, M.; Tosi, D. Shallow-tapered chirped fiber Bragg grating sensors for dual refractive index and temperature sensing. Sensors 2021, 21, 3635. [Google Scholar]
- Coimbra, W.; Oliveira, P.; Marques, C.; Leal-Junior, A. Chirped Fiber Bragg Grating Sensors for Force Intensity and Location Assessment in Occlusal Splints: A Proof-of-Concept. IEEE Trans. Biomed. Eng. 2022; early access. [Google Scholar] [CrossRef]
- Sivananth, V.; Ramkumar, V. Damage detection in Aerospace structures using Chirped fiber Bragg grating. Mater. Today Proc. 2022, 64, 632–636. [Google Scholar]
- Kiesewetter, D.; Krivosheev, S.; Magazinov, S.; Malyugin, V.; Varzhel, S.; Loseva, E.; Koshkinbayev, S.; Smailov, N. Application of Fiber Bragg Gratings as a Sensor of Pulsed Mechanical Action. Sensors 2022, 22, 7289. [Google Scholar]
- Min, R.; Ortega, B.; Broadway, C.; Hu, X.; Caucheteur, C.; Bang, O.; Antunes, P.; Marques, C. Microstructured PMMA POF chirped Bragg gratings for strain sensing. Opt. Fiber Technol. 2018, 45, 330–335. [Google Scholar] [CrossRef]
- Korganbayev, S.; Min, R.; Jelbuldina, M.; Hu, X.; Caucheteur, C.; Bang, O.; Ortega, B.; Marques, C.; Tosi, D. Thermal profile detection through high-sensitivity fiber optic chirped Bragg grating on microstructured PMMA fiber. J. Lightwave Technol. 2018, 36, 4723–4729. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Rocha, H.R.O.; Theodosiou, A.; Frizera, A.; Marques, C.; Kalli, K.; Ribeiro, M.R.N. Optimizing Linearity and Sensitivity of 3D-Printed Diaphragms With Chirped FBGs in CYTOP Fibers. IEEE Access 2020, 8, 31983–31991. [Google Scholar]
- Inman, D.J.; Singh, R.C. Engineering Vibration; Prentice Hall: Englewood Cliffs, NJ, USA, 1994; Volume 3. [Google Scholar]
- Min, R.; Korganbayev, S.; Molardi, C.; Broadway, C.; Hu, X.; Caucheteur, C.; Bang, O.; Antunes, P.; Tosi, D.; Marques, C.; et al. Largely tunable dispersion chirped polymer FBG. Opt. Lett. 2018, 43, 5106–5109. [Google Scholar] [PubMed]
- Souza, E.A.; Macedo, L.C.; Frizera, A.; Marques, C.; Leal-Junior, A. Fiber Bragg Grating Array for Shape Reconstruction in Structural Elements. Sensors 2022, 22, 6545. [Google Scholar] [PubMed]
- Betta, G.; Liguori, C.; Paolillo, A.; Pietrosanto, A. A DSP-based FFT-analyzer for the fault diagnosis of rotating machine based on vibration analysis. IEEE Trans. Instrum. Meas. 2002, 51, 1316–1322. [Google Scholar]
- Vorathin, E.; Hafizi, Z.M.; Aizzuddin, A.M.; Zaini, M.K.; Lim, K.S. Temperature-independent chirped FBG pressure transducer with high sensitivity. Opt. Lasers Eng. 2019, 117, 49–56. [Google Scholar] [CrossRef]
- Waghulde, K.; Sinha, B.; Patil, M.; Mishra, S. Vibration control of cantilever smart beam by using piezoelectric actuators and sensors. Int. J. Eng. Technol. 2010, 2, 259–262. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Frequency (Hz) |
|---|---|
| 1 | 18.0619 |
| 2 | 107.199 |
| 3 | 322.655 |
| 4 | 593.427 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macedo, L.; Souza, E.A.; Frizera, A.; Pontes, M.J.; Marques, C.; Leal-Junior, A. Static and Dynamic Multiparameter Assessment of Structural Elements Using Chirped Fiber Bragg Gratings. Sensors 2023, 23, 1860. https://doi.org/10.3390/s23041860
Macedo L, Souza EA, Frizera A, Pontes MJ, Marques C, Leal-Junior A. Static and Dynamic Multiparameter Assessment of Structural Elements Using Chirped Fiber Bragg Gratings. Sensors. 2023; 23(4):1860. https://doi.org/10.3390/s23041860
Chicago/Turabian StyleMacedo, Leandro, Edson A. Souza, Anselmo Frizera, Maria José Pontes, Carlos Marques, and Arnaldo Leal-Junior. 2023. "Static and Dynamic Multiparameter Assessment of Structural Elements Using Chirped Fiber Bragg Gratings" Sensors 23, no. 4: 1860. https://doi.org/10.3390/s23041860