
Accuracy and Interpretation of the Acceleration from an Inertial Measurement Unit When Applied to the Sprint Performance of Track and Field Athletes



Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Overview
2.2. Participants
2.3. Experimental Procedures
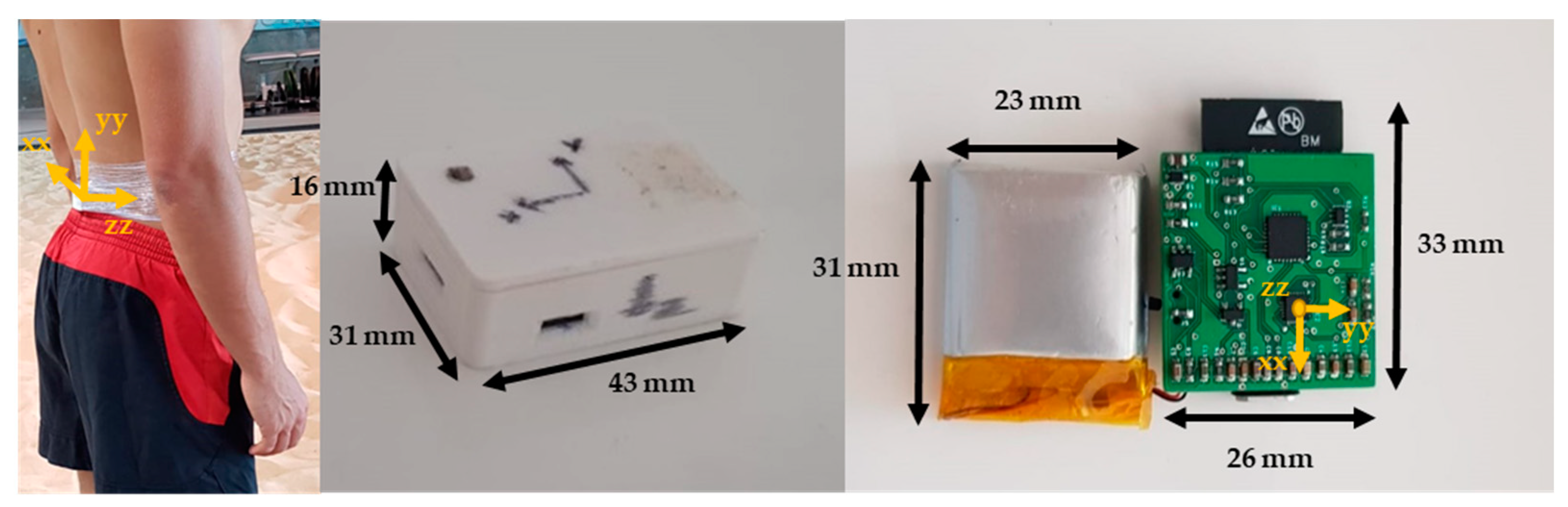
2.4. Instruments
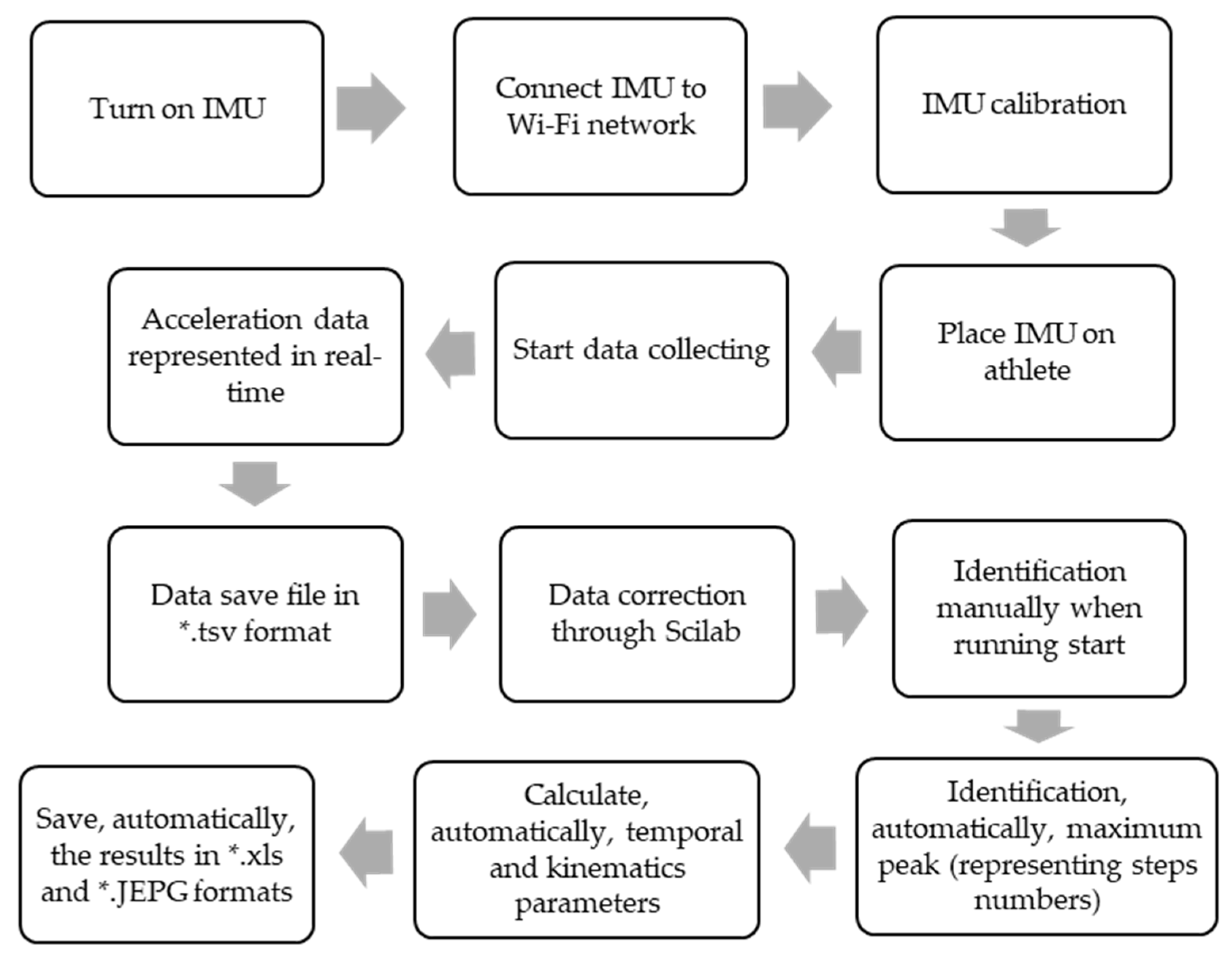
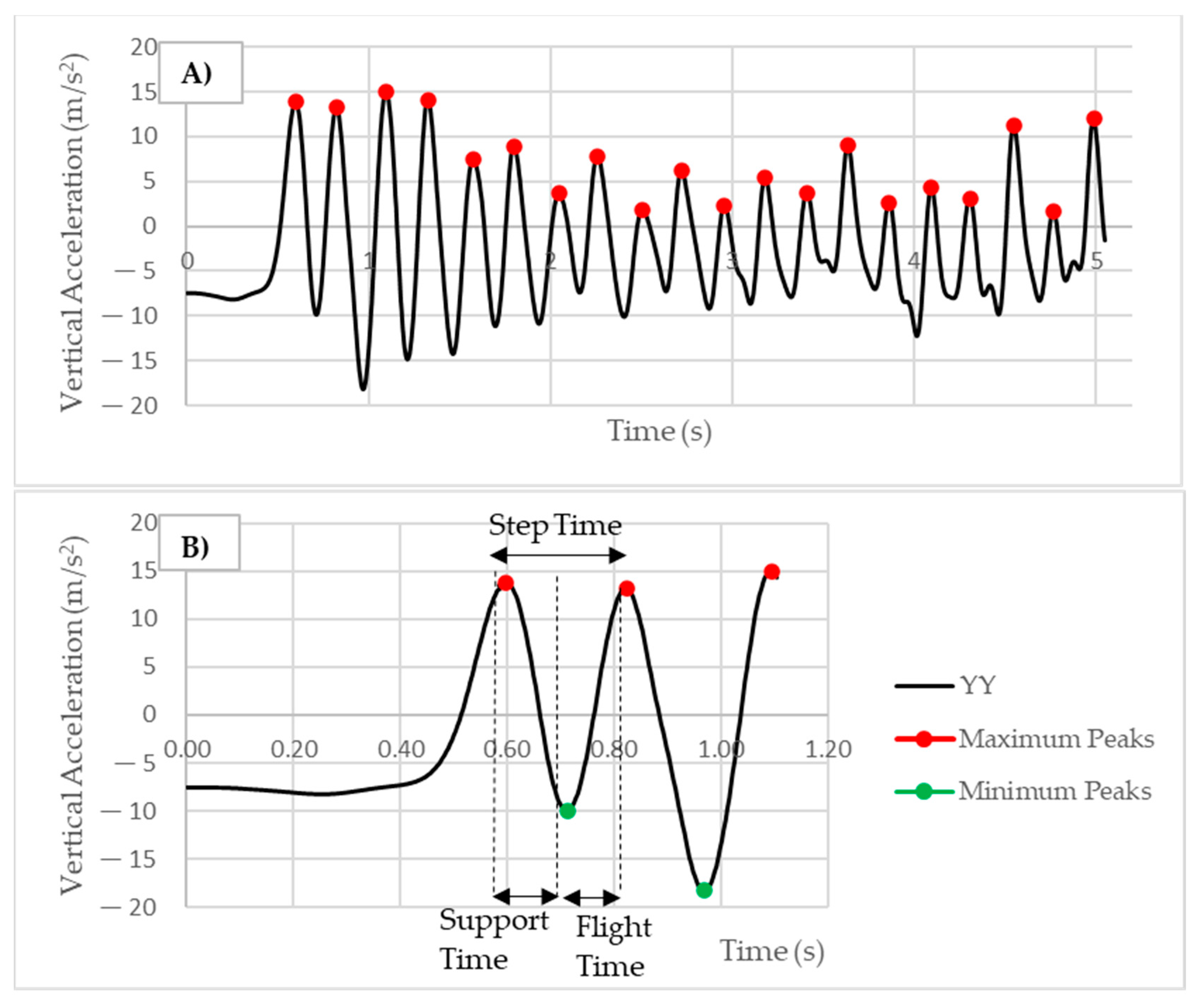
2.5. Data Processing
2.6. Statistical Analysis
3. Results
3.1. Descriptive Analysis
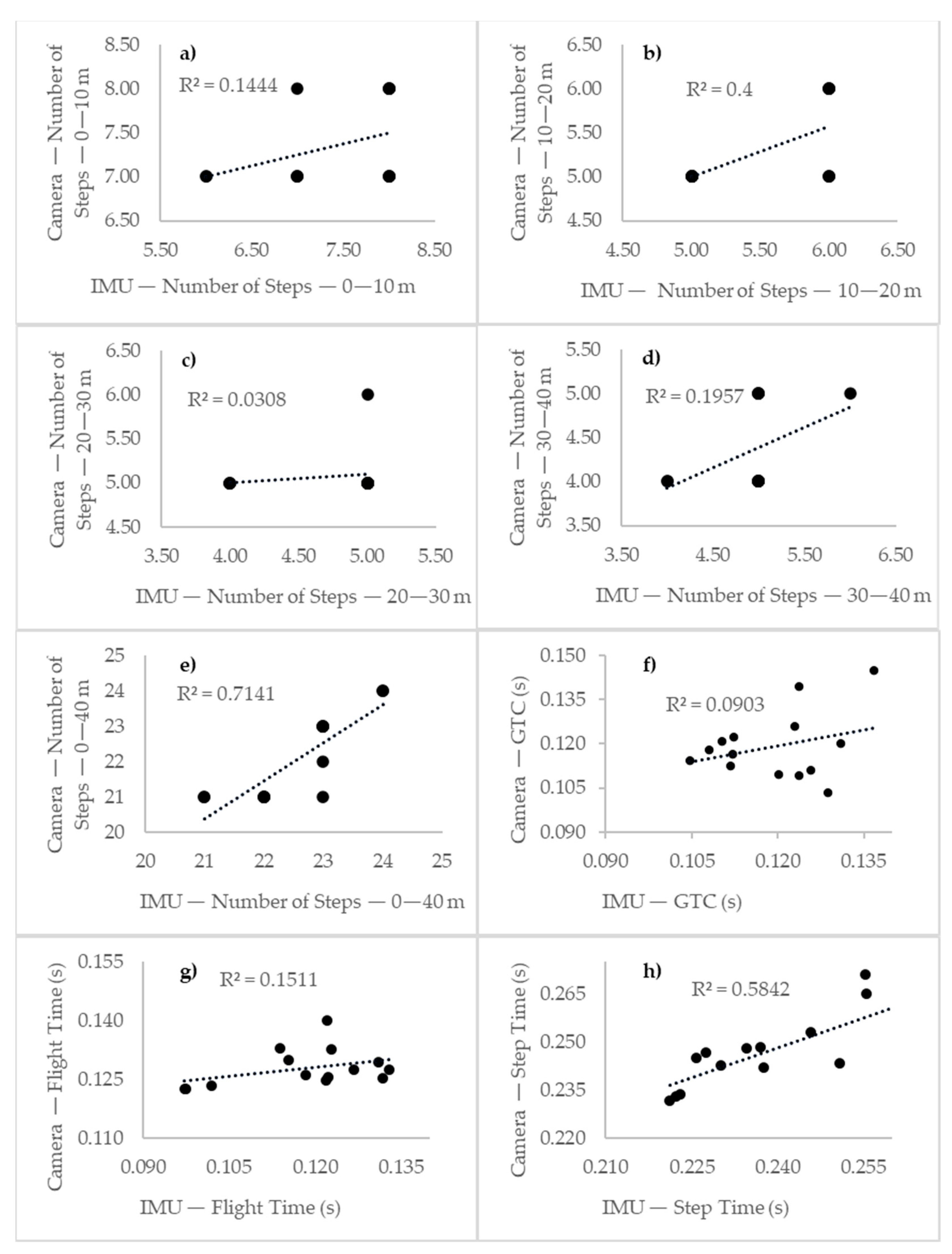
3.2. Accuracy Data
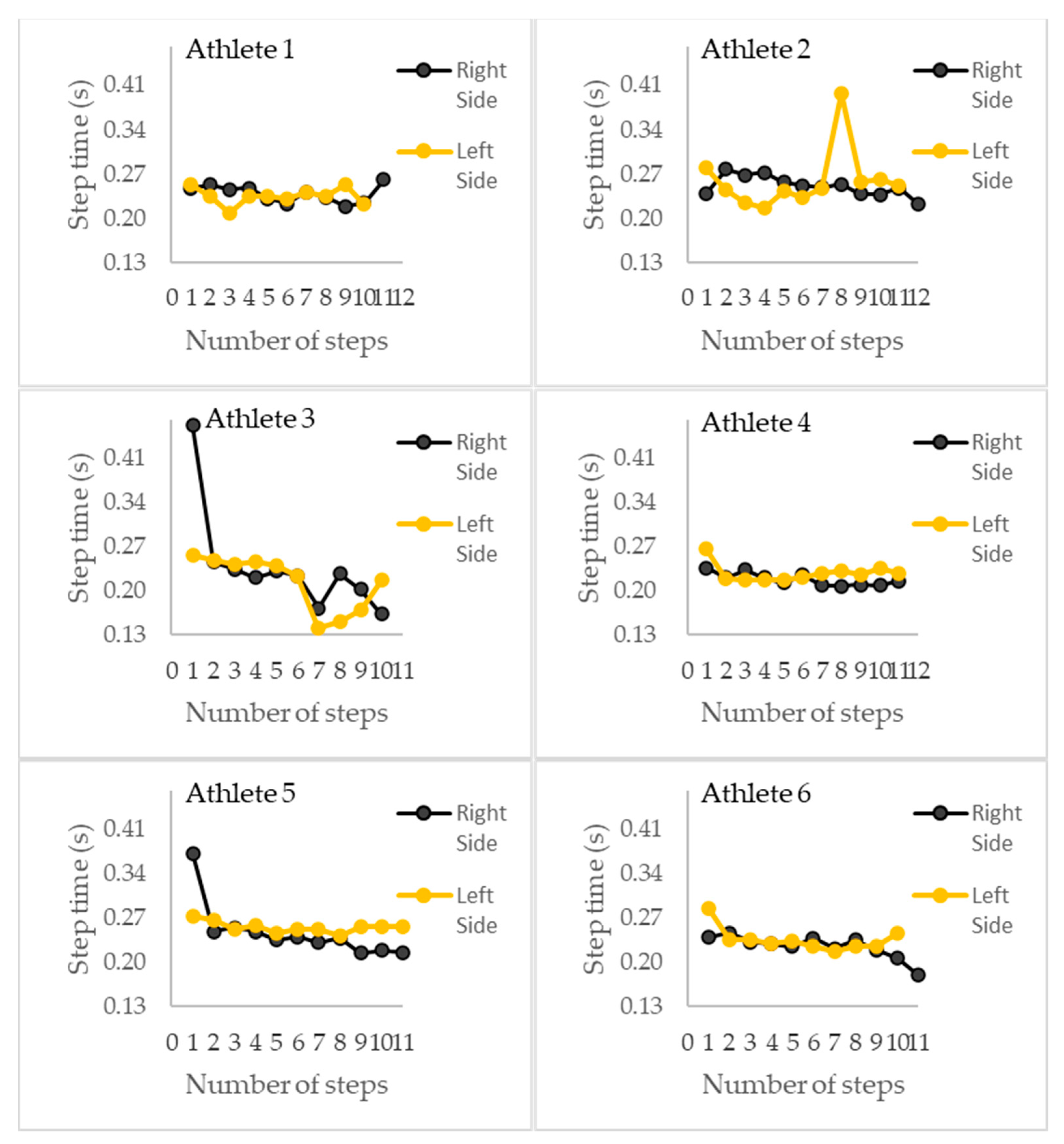
3.3. Analyzing Symmetries or Asymmetries
3.4. Linear Regression Models between IMU Acceleration and the Average Velocity Obtained by the Photocells
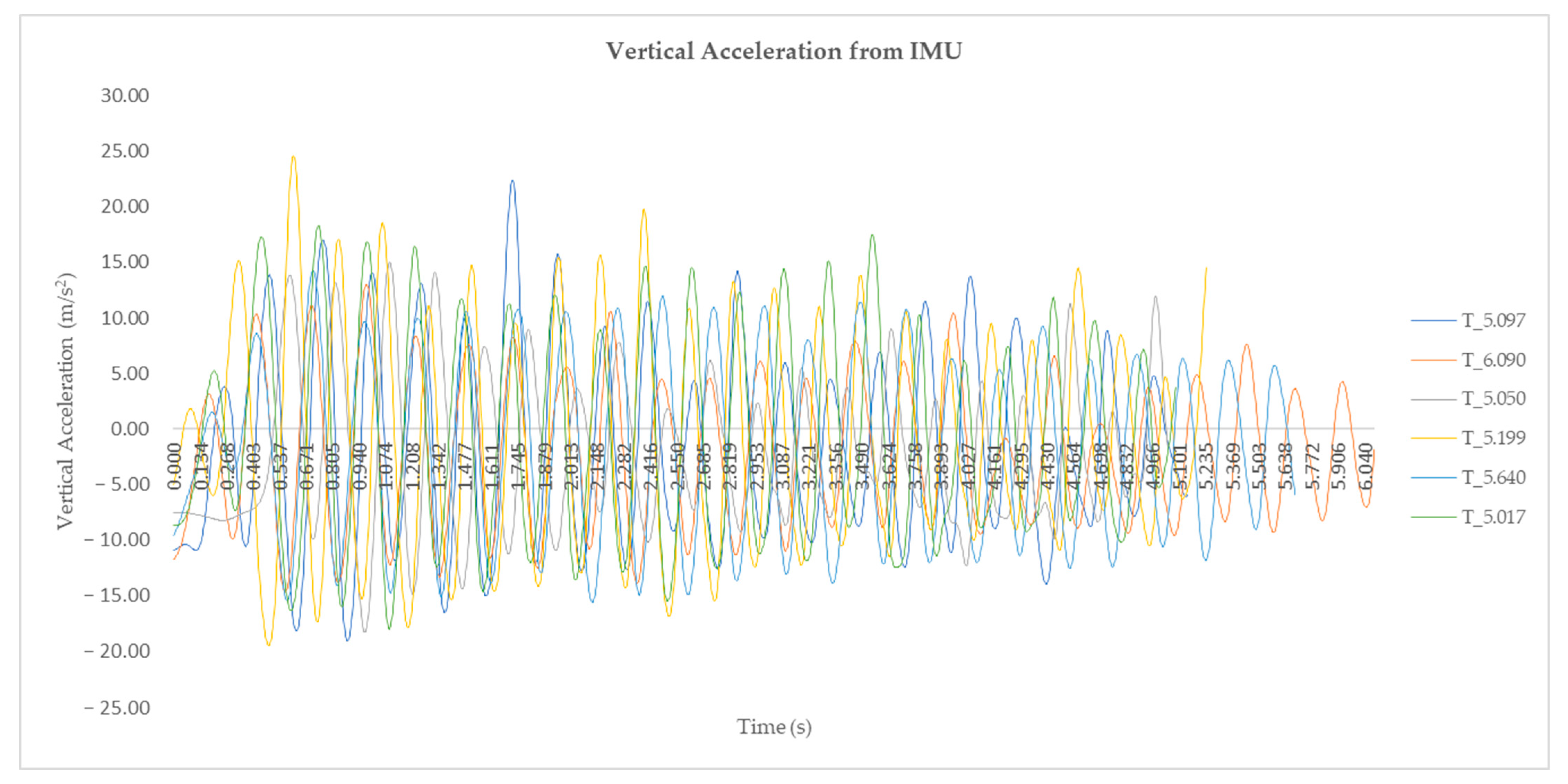
3.5. Acceleration Images
4. Discussion
4.1. Accuracy of the Number of Steps
4.2. Accuracy of the Temporal Parameters
4.3. Analyzed Symmetries and Asymmetries
4.4. Linear Regression Models between IMU Acceleration and the Average Velocity Obtained by the Photocells
4.5. Recommendations and Practical Applications
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Morin, J.B.; Edouard, P.; Samozino, P. Technical ability of force application as a determinant factor of sprint performance. Med. Sci. Sport. Exerc. 2011, 43, 1680–1688. [Google Scholar] [CrossRef] [PubMed]
- Apte, S.; Meyer, F.; Gremeaux, V.; Dadashi, F.; Aminian, K. A Sensor Fusion Approach to the Estimation of Instantaneous Velocity Using Single Wearable Sensor During Sprint. Front Bioeng Biotechnol. 2020, 8, 838. [Google Scholar] [CrossRef] [PubMed]
- Cronin, J.B.; Hansen, K.T. Strength and power predictors of sports speed. J. Strength Cond. Res. 2005, 19, 349–357. [Google Scholar] [CrossRef]
- Kuznietsov, A. Inertial measurement system for performance evaluation of track and field sprinters. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 1681–1686. [Google Scholar] [CrossRef]
- Kenneally-Dabrowski, C.J.B.; Serpell, B.G.; Spratford, W. Are accelerometers a valid tool for measuring overground sprinting symmetry? Int. J. Sport. Sci. Coach. 2018, 13, 270–277. [Google Scholar] [CrossRef]
- Bailey, G.P.; Harle, R. Assessment of Foot Kinematics During Steady State Running Using a Foot-mounted IMU. Procedia Eng. 2014, 72, 32–37. [Google Scholar] [CrossRef]
- Setuain, I.; Lecumberri, P.; Ahtiainen, J.P.; Mero, A.A.; Häkkinen, K.; Izquierdo, M. Sprint mechanics evaluation using inertial sensor-based technology: A laboratory validation study. Scand. J. Med. Sci. Sport. 2018, 28, 463–472. [Google Scholar] [CrossRef] [PubMed]
- Bergamini, E.; Picerno, P.; Pillet, H.; Natta, F.; Thoreux, P.; Camomilla, V. Estimation of temporal parameters during sprint running using a trunk-mounted inertial measurement unit. J. Biomech. 2012, 45, 1123–1126. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, M.; Rheinländer, C.C.; Wille, S.; Wehn, N.; Jaitner, T. IMU-based determination of fatigue during long sprint. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct (UbiComp ’16); Heidelberg, Germany, 12–16 September 2016, Association for Computing Machinery: New York, NY, USA, 2016; pp. 899–903. [Google Scholar] [CrossRef]
- Young, F.; Mason, R.; Wall, C.; Morris, R.; Stuart, S.; Godfrey, A. Examination of a foot mounted IMU-based methodology for a running gait assessment. Front. Sport. Act Living 2022, 4, 956889. [Google Scholar] [CrossRef]
- Nagahara, R.; Mizutani, M.; Matsuo, A.; Kanehisa, H.; Fukunaga, T. Association of Sprint Performance With Ground Reaction Forces During Acceleration and Maximal Speed Phases in a Single Sprint. J. Appl. Biomech. 2018, 34, 104–110. [Google Scholar] [CrossRef]
- Rabita, G.; Dorel, S.; Slawinski, J.; Sàez-de-Villarreal, E.; Couturier, A.; Samozino, P.; Morin, J.B. Sprint mechanics in world-class athletes: A new insight into the limits of human locomotion. Scand. J. Med. Sci. Sport. 2015, 25, 583–594. [Google Scholar] [CrossRef]
- Morin, J.B.; Bourdin, M.; Edouard, P.; Peyrot, N.; Samozino, P.; Lacour, J.R. Mechanical determinants of 100-m sprint running performance. Eur. J. Appl. Physiol. 2012, 112, 3921–3930. [Google Scholar] [CrossRef]
- Schmidt, M.; Rheinländer, C.; Nolte, K.F.; Wille, S.; Wehn, N.; Jaitner, T. IMU- based Determination of Stance Duration During Sprinting. Procedia Eng. 2016, 147, 747–752. [Google Scholar] [CrossRef]
- Lee, J.B.; Mellifont, R.B.; Burkett, B.J. The use of a single inertial sensor to identify stride, step, and stance durations of running gait. J. Sci. Med. Sport 2010, 13, 270–273. [Google Scholar] [CrossRef]
- Bailey, G.P.; Harle, R. A Portable, Inexpensive Point-Tracking System for Validation of Wearable Biomechanics Sensors. In Proceedings of the 4th International Congress on Sport Sciences Research and Technology Support, Porto, Portugal, 7 November 2016. [Google Scholar] [CrossRef]
- Wixted, A.J.; Billing, D.C.; James, D.A. Validation of trunk mounted inertial sensors for analysing running biomechanics under field conditions, using synchronously collected foot contact data. Sports Eng. 2010, 12, 207–212. [Google Scholar] [CrossRef]
- Slawinski, J.; Millot, B.; Houel, N.; Dinu, D. Use of an Inertial Measurement System to Calculate Maximal Power during Running Sprint Acceleration: Comparison with the Radar System. Proceedings 2020, 49, 23. [Google Scholar] [CrossRef]
- Macadam, P.; Nuell, S.; Cronin, J.B.; Uthoff, A.M.; Nagahara, R.; Neville, J.; Graham, S.P.; Tinwala, F. Thigh positioned wearable resistance affects step frequency not step length during 50 m sprint-running. Eur. J. Sport Sci. 2020, 20, 444–451. [Google Scholar] [CrossRef]
- Macadam, P.; Cronin, J.B.; Uthoff, A.M.; Nagahara, R.; Zois, J.; Diewald, D.; Tinwala, F.; Neville, J. Thigh loaded wearable resistance increases sagittal plane rotational work of the thigh resulting in slower 50-m sprint times. Sport. Biomech. 2022, 21, 1291–1302. [Google Scholar] [CrossRef]
- Blauberger, P.; Horsch, A.; Lames, M. Detection of Ground Contact Times with Inertial Sensors in Elite 100-m Sprints under Competitive Field Conditions. Sensors 2021, 21, 7331. [Google Scholar] [CrossRef] [PubMed]
- Giandolini, M.; Poupard, T.; Gimenez, P.; Horvais, N.; Millet, G.Y.; Morin, J.B.; Samozino, P. A simple field method to identify foot strike pattern during running. J. Biomech. 2014, 7, 1588–1593. [Google Scholar] [CrossRef] [PubMed]
- Setuain, I.; Lecumberri, P.; Izquierdo, M. Sprint mechanics return to competition follow-up after hamstring injury on a professional soccer player: A case study with an inertial sensor unit based methodological approach. J. Biomech. 2017, 63, 186–191. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation: A systematic review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Räisänen, A.M.; Clermont, C.A.; Ferber, R. Is This the Real Life, or Is This Just Laboratory? A Scoping Review of IMU-Based Running Gait Analysis. Sensors 2022, 22, 1722. [Google Scholar] [CrossRef] [PubMed]
- Nielsen, E.T.; Jørgensen, P.B.; Mechlenburg, I.; Sørensen, H. Validation of an inertial measurement unit to determine countermovement jump height. Asia-Pac. J. Sport. Med. Arthrosc. Rehabil. Technol. 2019, 16, 8–13. [Google Scholar] [CrossRef] [PubMed]
- Winter, A.D. Biomechanics and Motor Control of Human Movement, 3rd ed.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2005; pp. 34–53. [Google Scholar]
- Miranda-Oliveira, P.; Branco, M.; Fernandes, O. Accuracy of Inertial Measurement Units When Applied to the Countermovement Jump of Track and Field Athletes. Sensors 2022, 22, 7186. [Google Scholar] [CrossRef]
- Miranda-Oliveira, P.; Branco, M.; Fernandes, O.J.; Santos-Rocha, R. Comparison of the accuracy of a free 3D camera system with the Ariel performance system. Comput. Methods Biomech. Biomed. Eng. Imaging Vis. 2021, 9, 670–677. [Google Scholar] [CrossRef]
- Hopkins, W.G.; Marshall, S.W.; Batterham, A.M.; Hanin, J. Progressive statistics for studies in sports medicine and exercise science. Med. Sci. Sports Exerc. 2009, 41, 3–13. [Google Scholar] [CrossRef]
- Colyer, S.L.; Nagahara, R.; Salo, A.I.T. Kinetic demands of sprinting shift across the acceleration phase: Novel analysis of entire force waveforms. Scand. J. Med. Sci. Sport 2018, 28, 1784–1792. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analyzed Parameter | Mean (SD) | Minimum | Maximum |
|---|---|---|---|
| Number of steps | |||
| 0–10 m (IMU) | 7.43 (0.756) | 6 | 8 * |
| 0–10 m (Camera) | 7.36 (0.497) | 7 | 8 * |
| 10–20 m (IMU) | 5.50 (0.519) | 5 | 6 * |
| 10–20 m (Camera) | 5.29 (0.469) | 5 | 6 * |
| 20–30 m (IMU) | 4.71 (0.469) | 4 | 5 * |
| 20–30 m (Camera) | 5.07 (0.267) | 5 | 6 * |
| 30–40 m (IMU) | 4.93 (0.475) | 4 | 6 * |
| 30–40 m (Camera) | 4.36 (0.497) | 4 | 5 * |
| 0–40 m (IMU) | 22.6 (0.938) | 21 | 24 * |
| 0–40 m (Camera) | 22.1 (1.210) | 21 | 24 * |
| Time (s) | |||
| Ground contact time (IMU) | 0.119 (0.010) | 0.105 | 0.137 |
| Ground contact time (Camera) | 0.119 (0.012) | 0.103 | 0.145 |
| Flight time (IMU) | 0.118 (0.012) | 0.097 | 0.133 |
| Flight time (Camera) | 0.128 (0.005) | 0.123 | 0.140 |
| Step time (IMU | 0.238 (0.014) | 0.221 | 0.261 |
| Step time (Camera) | 0.247 (0.011) | 0.232 | 0.271 |
| Analyzed Parameter | Mean Error (SD) | Abs Mean Error | r | p | ¥ |
|---|---|---|---|---|---|
| Number of steps | |||||
| 0–10 m | −0.071 (0.703) | 0.500 | 0.374 | 0.188 | 0.555 |
| 10–20 m | −0.214 (0.410) | 0.214 | 0.632 | 0.015 | 0.266 |
| 20–30 m | 0.357 (0.479) | 0.357 | 0.175 | 0.559 | 0.025 |
| 30–40 m | −0.571 (0.495) | 0.571 | 0.438 | 0.117 | 0.007 |
| 0–40 m | −0.500 (0.627) | 0.500 | 0.875 | <0.001 | 0.239 |
| Time (s) | |||||
| Ground contact time | 0.000 (0.012) | 0.011 | 0.037 | 0.904 | 0.953 |
| Flight time | 0.010 (0.011) | 0.012 | 0.378 | 0.182 | 0.010 |
| Step time | 0.009 (0.009) | 0.012 | 0.793 | 0.001 | 0.066 |
| IMU Data—Acceleration (m/s2) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Distance | Photocells (m/s) | Ratio | XX Max | XX Min | YY Max | YY Min | ZZ Max | ZZ Min |
| 0–10 m | 5.23 (0.34) | 0.52 (0.09) | 13.60 (2.31) * | −20.50 (6.12) * | 18.70 (5,68) | 17.80 (2.31) | 13.40 (3.45) | −12.20 (2.99) |
| 10–20 m | 8.23 (0.58) * | 0.70 (0.11) | 19.00 (2.37) ¥ | −24.10 (9.37) * | 15.50 (5.62) | −13.90 (2.00) | 12.00 (4.30) | −11.20 (3.07) |
| 20–30 m | 8.97 (0.71) | 0.74 (0.11) | 21.00 (4.07) ¥ | −26.90 (8.14) ¥ | 12.80 (2.52) | −12.20 (1.61) | 12.30 (6.31) | −10.60 (4.69) |
| 30–40 m | 9.20 (0.83) | 0.74 (0.12) | 20.80 (6.61) | −24.90 (6.58) | 12.20 (3.11) | −11.40 (1.38) | 11.80 (5.69) ¥ | −9.27 (4.34) |
| 0–40 m | 7.50 (0.54) | 0.68 (0.09) | 23.20 (4.08) ¥ | −29.60 (8.36) | 19.70 (5.59) | −17.80 (2.30) | 15.00 (5.56) | −13.50 (3.84) |
| Predictor | β | SE | t | p | R | R2 | |
|---|---|---|---|---|---|---|---|
| Velocity | Intercept | 5.289 | 1.044 | 5.070 | <0.001 | 0.634 | 0.402 |
| 10–20 m | Maximum acceleration XX | 0.155 | 0.055 | 2.840 | 0.015 | ||
| Velocity | Intercept | 6.807 | 0.923 | 7.378 | <0.001 | 0.590 | 0.348 |
| 20–30 m | Maximum acceleration XX | 0.076 | 0.047 | 1.607 | 0.136 | ||
| Minimum acceleration XX | −0.022 | 0.024 | −0.926 | 0.374 | |||
| Velocity | Intercept | 8.148 | 0.436 | 18.690 | <0.001 | 0.609 | 0.370 |
| 30–40 m | Maximum acceleration ZZ | 0.089 | 0.034 | 2.660 | 0.021 | ||
| Velocity | Intercept | 5.197 | 0.583 | 8.920 | <0.001 | 0.757 | 0.573 |
| 0–40 m | Maximum acceleration XX | 0.099 | 0.025 | 4.010 | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miranda-Oliveira, P.; Branco, M.; Fernandes, O. Accuracy and Interpretation of the Acceleration from an Inertial Measurement Unit When Applied to the Sprint Performance of Track and Field Athletes. Sensors 2023, 23, 1761. https://doi.org/10.3390/s23041761
Miranda-Oliveira P, Branco M, Fernandes O. Accuracy and Interpretation of the Acceleration from an Inertial Measurement Unit When Applied to the Sprint Performance of Track and Field Athletes. Sensors. 2023; 23(4):1761. https://doi.org/10.3390/s23041761
Chicago/Turabian StyleMiranda-Oliveira, Paulo, Marco Branco, and Orlando Fernandes. 2023. "Accuracy and Interpretation of the Acceleration from an Inertial Measurement Unit When Applied to the Sprint Performance of Track and Field Athletes" Sensors 23, no. 4: 1761. https://doi.org/10.3390/s23041761