
Vehicle Detection and Recognition Approach in Multi-Scale Traffic Monitoring System via Graph-Based Data Optimization


Abstract
:1. Introduction
- Targeted at complex datasets, preprocessing, and optimized outer body shape extraction approaches are performed.
- Robust approaches such as denoising, object shape optimization, and feature extraction are applied to extract useful information in feature extraction methods.
- To smooth the process of detection and recognition of ANN, a graph mining strategy is employed for better feature selection.
- Additionally, two benchmark datasets—LISA and KITTI 7—were subjected to an extensive examination for a multi-scale traffic monitoring system. The results of the experiments show a higher recognition rate that also exceeds sophisticated systems.
2. Related Work
3. Material and Methods
3.1. Frame Conversion
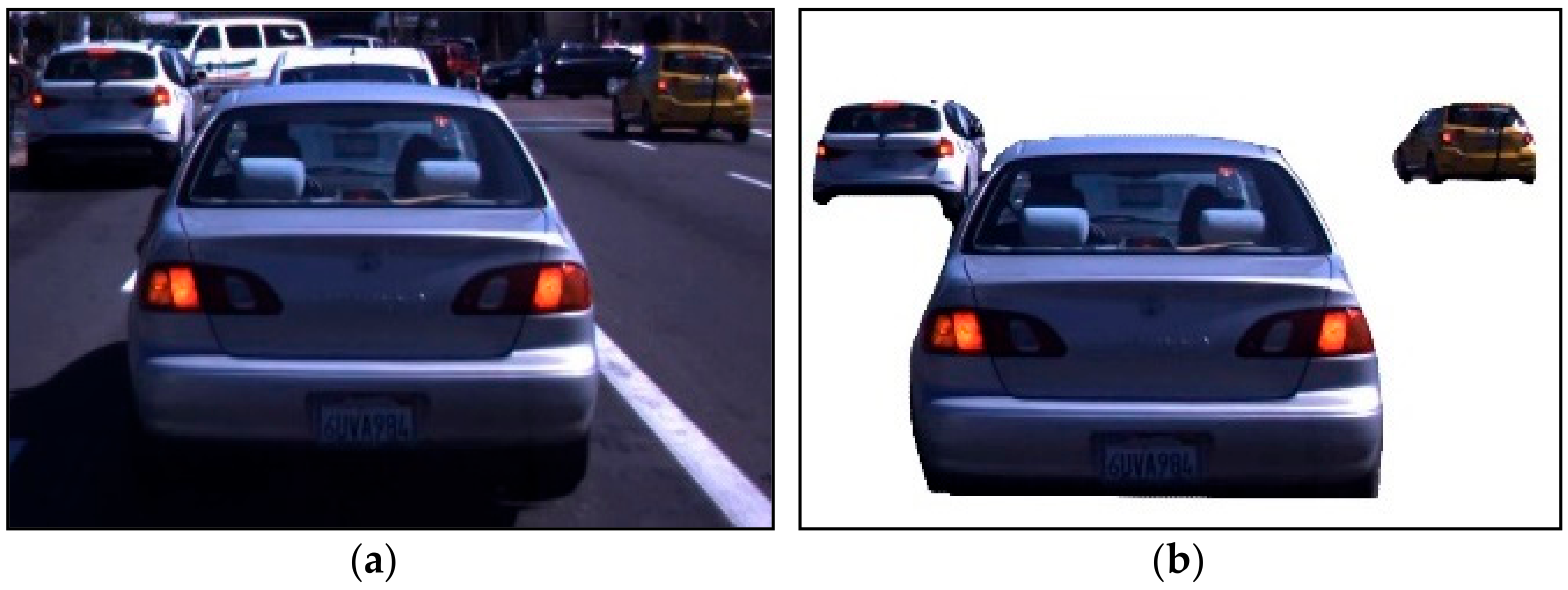
3.2. Background Subtraction
3.3. Object Shape Optimization
3.4. Extracting Region of Interest
3.5. Feature Extraction
| Algorithm 1. Features Extraction. |
| Input: Input_data Output: Feature_vect ExtractedfeaturesVector ← [] GetData_F_F() Data_size_F1 GetData_F1_size() Procedure PAP(Video, Images) [] Denoise_Input_Data Pre_processing() Sampled_Data(DenoiseData) While exit invalid state do ExtractlFeatures(sample data) [] Return MainfeaturesVector |
3.5.1. Energy Features
3.5.2. Dense Optical Flow
3.6. Data Optimization: Graph Mining
| Algorithm 2. Data Mining via the Graph Mining Approach. |
| Input: All Features (Af) Output: Mined_data All_feature ← [] for i = 1: k do Read_Data: Q→(Af) Tree_Creating: TC_tree(Q→0) Read_Data: to find min R(min) and max R(Max) Find_next_node: R(Af→ next_node) Find Mutual_node: apprise_the_list Mine_the_date: min(Tree,apprise) Restrictive_TC_tree:Produce_the_tree(mining) end return Optimized Data {OD} |
3.7. Vehical Detection: Artificial Neural Network
4. Experimental Evaluation and Settings
4.1. Dataset Description
4.2. Hardware/Software Environment
4.3. Results and Comparison
- The drawback of the proposed method is that for each camera data feed, a substantial amount of parameter adjusting is needed to achieve optimal performance.
- Second, it is assumed that the automobiles in the scenes need to be visible and not hidden.
- Another shortcoming is its inability to distinguish extremely small automobiles, which requires the use of multimodal information to track objects.
5. Conclusions
- Different preprocessing techniques, such as frame conversion and background subtraction, are utilized. The detection and recognition mof moving automobiles employ denoising and background subtraction techniques in which the background is modeled based on the behavioral study of intensity transitions.
- Second, we extracted the ROI to detect the vehicle’s silhouette. The recognition of automobiles is processed through an area of interest determined by the objects’ shape.
- After that, feature extraction was conducted, and two important features were abstracted. These features include energy and dense optical flow features.
- Next, the graph-mining optimizing strategy was developed to reduce the redundant features and improve the system’s performance.
- Finally, essential features are served to artificial neural networks (ANN) to detect and recognize automobiles in a robust manner.
- The proposed method was evaluated using two benchmark datasets. The proposed MSTM method yields better results with adequate speed for less restrictive highway video surveillance than other state-of-the-art systems. Moreover, enhancements should be made to tackle the occlusion issues in the scenarios.
- In future research, we will analyze image enhancement strategies and feature abstraction from low-quality image sequences.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lincy, R.B.; Gayathri, R. Optimally configured convolutional neural network for Tamil Handwritten Character Recognition by improved lion optimization model. Multimed. Tools Appl. 2021, 80, 5917–5943. [Google Scholar] [CrossRef]
- Shaffi, N.; Hajamohideen, F. uTHCD: A new benchmarking for Tamil handwritten OCR. IEEE Access 2021, 9, 101469–101493. [Google Scholar] [CrossRef]
- Jency, R.J.; Babitha, L.R.; Al-Heety, A.T. Moving vehicle detection from video sequences for traffic surveillance system. ITEGAM-JETIA 2021, 7, 41–48. [Google Scholar]
- Abdusalomov, A.; Mukhiddinov, M.; Djuraev, O.; Khamdamov, U.; Whangbo, T.K. Automatic Salient Object Extraction Based on Locally Adaptive Thresholding to Generate Tactile Graphics. Appl. Sci. 2020, 10, 3350. [Google Scholar] [CrossRef]
- Al Gharrawi, H.; Yaghoub, M.B. Traffic Management in Smart Cities Using the Weighted Least Squares Method. arXiv 2022, arXiv:2205.00346. [Google Scholar]
- Ur Rehman, M.A.; Raza, H.; Akhter, I. Security Enhancement of Hill Cipher by Using Non-Square Matrix Approach. In Proceedings of the 4th International Conference on Knowledge and Innovation in Engineering, Science and Technology, Berlin, Germany, 21–23 December 2018. [Google Scholar]
- Kaushek, K.T.R.; Thiruvikkraman, S.; Gokul, R.; Nirmal, A.; Karthika, R. Evaluating the scalability of a multi-object detector trained with multiple datasets. In Proceedings of the 2021 5th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 6–8 May 2021; pp. 1359–1366. [Google Scholar]
- Bhargavi, D.; Coyotl, E.P.; Gholami, S. Knock, knock. Who’s there?—Identifying football player jersey numbers with synthetic data. arXiv 2022, arXiv:2203.00734. [Google Scholar]
- Wang, Q.; Xu, N.; Huang, B.; Wang, G. Part-Aware Refinement Network for Occlusion Vehicle Detection. Electronics 2022, 11, 1375. [Google Scholar] [CrossRef]
- Gholami, S.; Khashe, S. Alexa, Predict My Flight Delay. arXiv 2022, arXiv:2208.09921. [Google Scholar]
- Hamdy, A.; Ezzat, G. Deep mining of open source software bug repositories. Int. J. Comput. Appl. 2022, 44, 614–622. [Google Scholar] [CrossRef]
- Maity, S.; Bhattacharyya, A.; Singh, P.K.; Kumar, M.; Sarkar, R. Last Decade in Vehicle Detection and Classification: A Comprehensive Survey. Arch. Comput. Methods Eng. 2022, 29, 5259–5296. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, W.; Wu, F.; De, S.; Wang, R.; Zhang, B.; Huang, X. A survey on an emerging area: Deep learning for smart city data. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 392–410. [Google Scholar] [CrossRef]
- Di, X.; Shi, R. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning. Transp. Res. C Emerg. Technol. 2021, 125, 103008. [Google Scholar] [CrossRef]
- Clady, X.; Negri, P.; Milgram, M.; Poulenard, R. Multi-class vehicle type recognition system. In Proceedings of the IAPR Workshop on Artificial Neural Networks in Pattern Recognition, Paris, France, 2–4 July 2008; pp. 228–239. [Google Scholar]
- Petrovic, V.S.; Cootes, T.F. Analysis of Features for Rigid Structure Vehicle Type Recognition. In Proceedings of the BMVC, Kingston, UK, 7–9 September 2004; Volume 2, pp. 587–596. [Google Scholar]
- Negri, P.; Clady, X.; Milgram, M.; Poulenard, R. An oriented-contour point based voting algorithm for vehicle type classification. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 1, pp. 574–577. [Google Scholar]
- Kazemi, F.M.; Samadi, S.; Poorreza, H.R.; Akbarzadeh-T, M.-R. Vehicle recognition based on fourier, wavelet and curvelet transforms—A comparative study. In Proceedings of the Fourth International Conference on Information Technology (ITNG’07), Las Vegas, NV, USA, 2–4 April 2007; pp. 939–940. [Google Scholar]
- Zhang, B. Reliable classification of vehicle types based on cascade classifier ensembles. IEEE Trans. Intell. Transp. Syst. 2012, 14, 322–332. [Google Scholar] [CrossRef]
- Hannan, M.A.; Gee, C.T.; Javadi, M.S. Automatic vehicle classification using fast neural network and classical neural network for traffic monitoring. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 2031–2042. [Google Scholar] [CrossRef]
- Satzoda, R.K.; Trivedi, M.M. Looking at vehicles in the night: Detection and dynamics of rear lights. IEEE Trans. Intell. Transp. Syst. 2016, 20, 4297–4307. [Google Scholar] [CrossRef]
- Qian, Z.; Yang, J.; Duan, L. Multiclass vehicle tracking based on local feature. In Proceedings of 2013 Chinese Intelligent Automation Conference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 137–144. [Google Scholar]
- Shujuan, S.; Zhize, X.; Xingang, W.; Guan, H.; Wenqi, W.; De, X. Real-time vehicle detection using Haar-SURF mixed features and gentle AdaBoost classifier. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 1888–1894. [Google Scholar]
- Elkerdawi, S.M.; Sayed, R.; ElHelw, M. Real-time vehicle detection and tracking using Haar-like features and compressive tracking. In ROBOT2013: First Iberian Robotics Conference; Springer: Cham, Switzerland, 2014; pp. 381–390. [Google Scholar]
- Miller, N.; Thomas, M.A.; Eichel, J.A.; Mishra, A. A hidden Markov model for vehicle detection and counting. In Proceedings of the 2015 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 269–276. [Google Scholar]
- Sun, D.; Watada, J. Detecting pedestrians and vehicles in traffic scene based on boosted HOG features and SVM. In Proceedings of the 2015 IEEE 9th International Symposium on Intelligent Signal Processing (WISP), Siena, Italy, 15–17 May 2015; pp. 1–4. [Google Scholar]
- Laopracha, N.; Sunat, K.; Chiewchanwattana, S. A novel feature selection in vehicle detection through the selection of dominant patterns of histograms of oriented gradients (DPHOG). IEEE Access 2019, 7, 20894–20919. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Mali, J.K. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; LeCun, Y. Overfeat: Integrated recognition, localization and detection using convolutional networks. arXiv 2013, arXiv:1312.6229. [Google Scholar]
- Yu, Y.; Yu, M.; Yan, G.; Zhai, Y. Length-based vehicle classification in multi-lane traffic flow. Trans. Tianjin Univ. 2011, 17, 362–368. [Google Scholar] [CrossRef]
- Meher, S.K.; Murty, M.N. Efficient method of moving shadow detection and vehicle classification. AEU-Int. J. Electron. Commun. 2013, 67, 665–670. [Google Scholar] [CrossRef]
- Moutakki, Z.; Ouloul, I.M.; Afdel, K.; Amghar, A. Real-time video surveillance system for traffic management with background subtraction using codebook model and occlusion handling. Transp. Telecommun. 2017, 18, 297. [Google Scholar] [CrossRef]
- Velazquez-Pupo, R.; Sierra-Romero, A.; Torres-Roman, D.; Shkvarko, Y.V.; Santiago-Paz, J.; Gómez-Gutiérrez, D.; Robles-Valdez, D.; Hermosillo-Reynoso, F.; Romero-Delgado, M. Vehicle Detection with Occlusion Handling, Tracking, and OC-SVM Classification: A High Performance Vision-Based System. Sensors 2018, 18, 374. [Google Scholar] [CrossRef] [PubMed]
- Chakrabarti, D.; Faloutsos, C. Graph mining: Laws, generators, and algorithms. ACM Comput. Surv. 2006, 38, 2es. [Google Scholar] [CrossRef]
- Zerroug, E.; Belaidi, S.; Chtita, S. Artificial neural network-based quantitative structure–activity relationships model and molecular docking for virtual screening of novel potent acetylcholinesterase inhibitors. J. Chin. Chem. Soc. 2021, 68, 1379–1399. [Google Scholar] [CrossRef]
- Jensen, M.-B.; Philipsen, M.-P.; Møgelmose, A.; Moeslund, T.-B.; Trivedi, M.-M. Vision for Looking at Traffic Lights: Issues, Survey, and Perspectives. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1800–1815. [Google Scholar] [CrossRef]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.; Villena-Martinez, V.; Garcia-Rodriguez, J. A review on deep learning techniques applied to semantic segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- Sivaraman, S.; Trivedi, M.M. A general active-learning framework for on-road vehicle recognition and tracking. IEEE Trans. Intell. Transp. Syst. 2010, 11, 267–276. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep Learning on Point Sets for 3d Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recognition/Detection System | TPR | FDR | TP/Sequence | FP/Sequence | FP/Object |
|---|---|---|---|---|---|
| Passively trained [38] | 89.5% | 51.1% | 4.2 | 4.1 | 0.9 |
| Active trained [38] | 93.5% | 7.1% | 0.3 | 4.2 | 0.1 |
| ALVeRT [38] | 95.0% | 6.4% | 0.29 | 4.2 | 0.06 |
| Proposed MTMS | 95.62% | 4.2% | 4.2 | 0.25 | 0.02 |
| Recognition/Detection System | TPR | FDR | TP/Sequence | FP/Sequence | FP/Object |
|---|---|---|---|---|---|
| Passively trained [38] | 83.5% | 79.7% | 4.0 | 1.0 | 3.3 |
| Active trained [38] | 80.5% | 41.7% | 0.72 | 0.98 | 0.57 |
| ALVeRT [38] | 91.7% | 25.5% | 0.39 | 1.14 | 0.31 |
| Proposed MTMS | 91.89% | 13.14% | 1.25 | 0.22 | 0.26 |
| Methods | ANN | ||
|---|---|---|---|
| Activities | Precision | Recall | F1 Score |
| K1 | 0.846 | 0.940 | 0.891 |
| K2 | 0.807 | 0.880 | 0.842 |
| K3 | 0.815 | 0.930 | 0.869 |
| K4 | 0.860 | 0.860 | 0.86 |
| K5 | 0.826 | 0.620 | 0.708 |
| K6 | 0.803 | 0.820 | 0.811 |
| K7 | 0.820 | 0.730 | 0.772 |
| Mean | 0.825 | 0.826 | 0.821 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wieczorek, G.; Tahir, S.B.u.d.; Akhter, I.; Kurek, J. Vehicle Detection and Recognition Approach in Multi-Scale Traffic Monitoring System via Graph-Based Data Optimization. Sensors 2023, 23, 1731. https://doi.org/10.3390/s23031731
Wieczorek G, Tahir SBud, Akhter I, Kurek J. Vehicle Detection and Recognition Approach in Multi-Scale Traffic Monitoring System via Graph-Based Data Optimization. Sensors. 2023; 23(3):1731. https://doi.org/10.3390/s23031731
Chicago/Turabian StyleWieczorek, Grzegorz, Sheikh Badar ud din Tahir, Israr Akhter, and Jaroslaw Kurek. 2023. "Vehicle Detection and Recognition Approach in Multi-Scale Traffic Monitoring System via Graph-Based Data Optimization" Sensors 23, no. 3: 1731. https://doi.org/10.3390/s23031731