Land-cover and land-use classification are important parts of SAR image application [
1,
2,
3]. According to the past studies, land surfaces can be more accurately classified from POLSAR image datasets. SAR image classification has become an important research issue since these images from RADARSAT-2, ALOS PALSAR, Terra SAR-X, and ENVISAT ASAR have been made available [
4]. POLSAR images provide important information about the structures of objects. SAR images are widely used in land-cover classification due to their ability to monitor objects’ structures [
5].
The presence of many features in POLSAR images creates challenges such as high computational times and irrelevant features for applications, which may adversely affect learning tools in both regression and classification [
3]. Therefore, to solve these possible challenges and produce accurate results in POLSAR image classification problems, it becomes critical to use a feature selection method (for dimensionality reduction) [
2]. Hence, feature selection methods have been studied in many published academic papers. However, most of these methods select features manually based on proposed classifiers. Thus, these methods have a limited ability to accurately select optimal features [
7]. Currently, feature selection is still a challenge for POLSAR classification [
8].
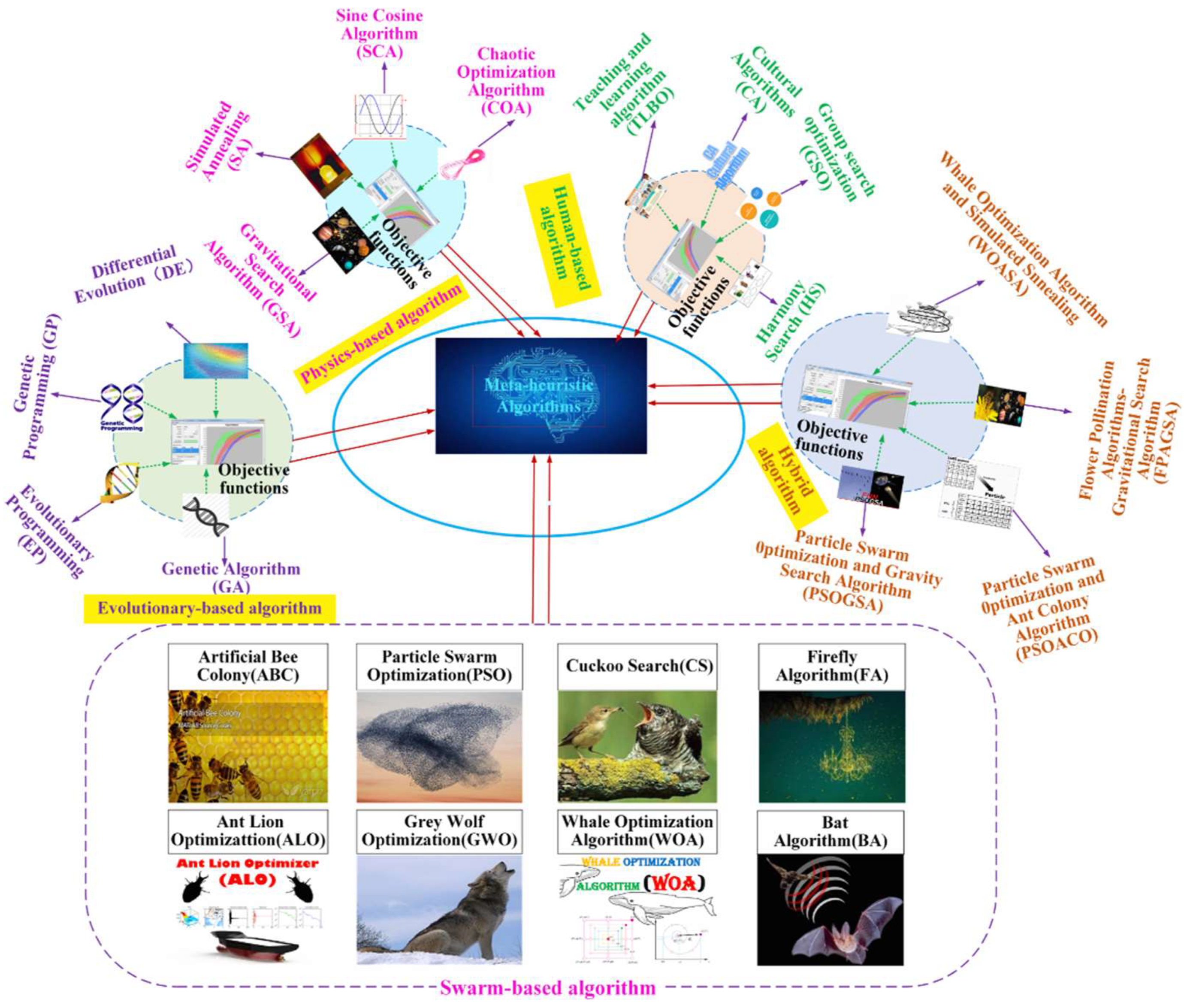
Feature selection methods are classified into three models: filter-based, embedded, and wrapper methods. Today, meta-heuristic algorithms are one of the most popular wrapper methods for feature selection problems [
3]. Meta-heuristic algorithms have become very popular in engineering problems [
9,
10,
11,
12,
13,
14,
15,
16]. As the complicacy of engineering problems increases, the need for new meta-heuristics becomes obvious more than before. The reasons for this request are simple structures and concepts, derivation-free mechanisms, local optimal avoidance, flexibility, and simple and effective hardware implementation [
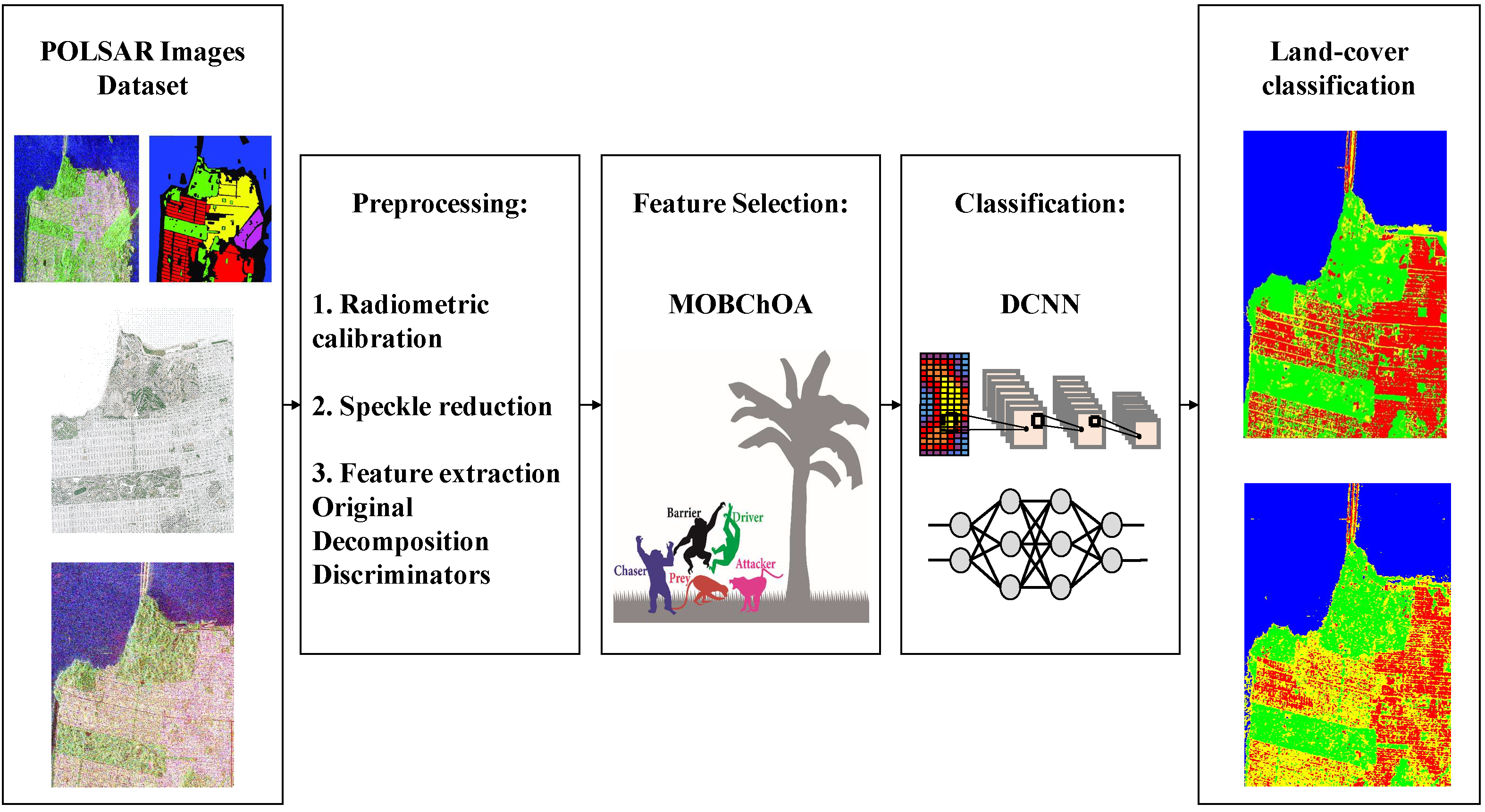
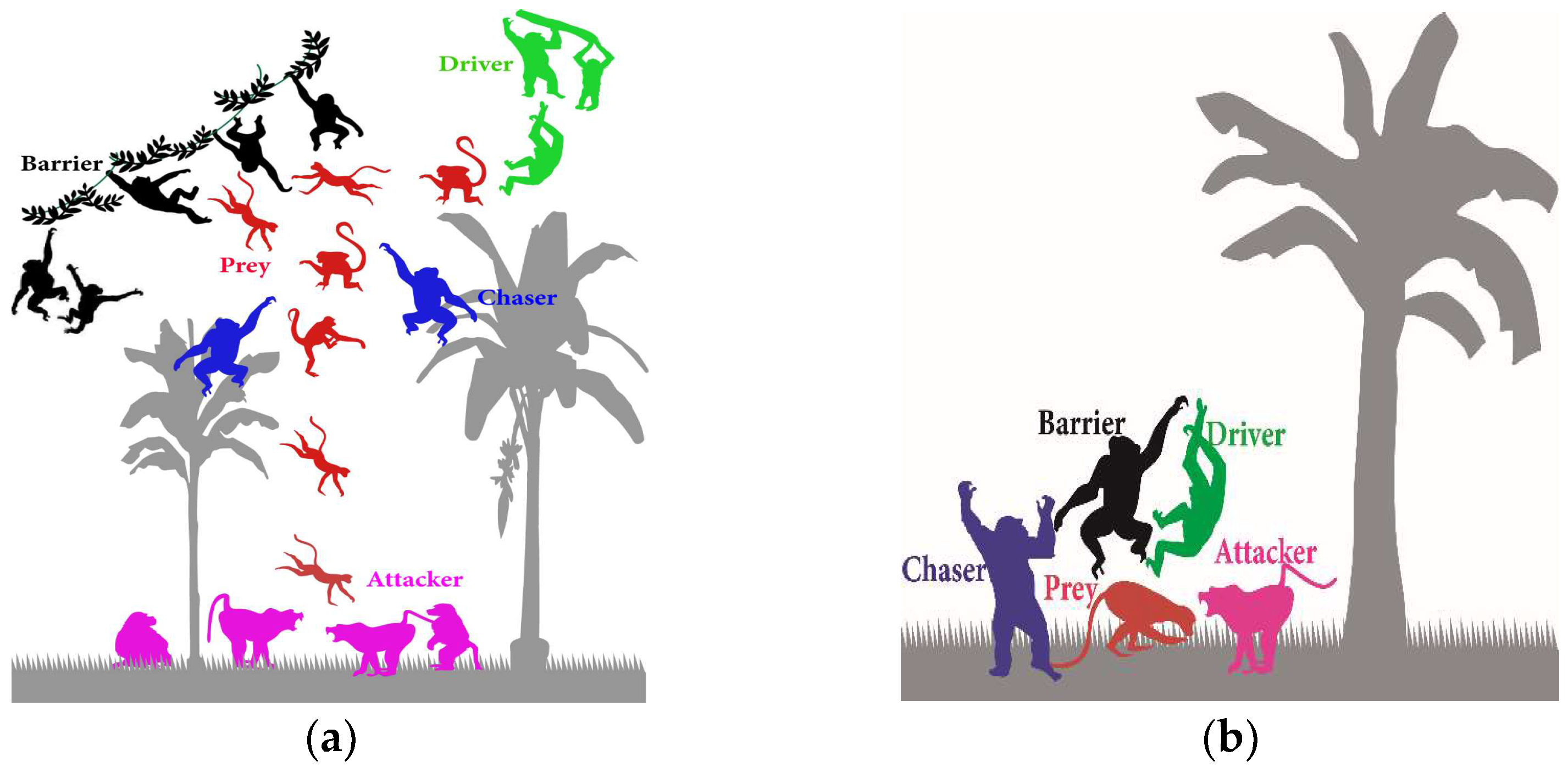
12]. For this reason, for this paper, a new meta-heuristic algorithm called MOBChOA was used to select the optimal features.
In general, land-cover classification requires powerful algorithms in both the feature selection and classification processes. Classifiers can be broadly divided into two categories: machine learning (ML) and statistical clustering [
17,
18,
19,
20]. A well-known statistical classifier is the Wishart classifier, a pixel-based maximum-likelihood classifier based on the complex Wishart distribution of the polarimetric coherency matrix [
2]. Moreover, numerous ML methods have been applied to POLSAR image classification, including deep learning (DL), neural networks (NNs), support vector machines (SVMs), and decision trees. However, the most effective model for classifying POLSAR images is not clear. Since 2006, DL has become a popular topic in the ML world [
21]. DL models are superior to traditional ML models due to data availability and system processing power developments [
22]. Additionally, reducing the computation time and increasing the convergence curve have increased the popularity of these methods. For this reason, for this paper, a deep convolutional neural network (DCNN) was used for land-cover classification.
In the real world, many problems have an inherent binary space, such as feature selection. Moreover, continuous problems can be changed into discrete problems using binary variables [
9,
10,
11,
12]. In addition, the no free lunch (NFL) theorem holds that there is no binary meta-heuristic that can appropriately solve all discrete problems [
12]. Therefore, the development of new binary algorithms is required to solve discrete problems. Hence, in this study, a new binary version of ChOA is proposed with a new transfer function.
1.1. Related Works
SAR is a new remote sensing technique that operates in the microwave frequency range, where it provides low- to high-resolution images of the Earth’s surface using reflected wave signals [
23]. Generally, a SAR system operates within the electromagnetic spectrum from 0.3 GHz up to 40 GHz with a side-looking geometry, where a transmitted wave is perpendicular to the direction of the flight of the system [
24]. The most important benefits of the SAR system are the ability to work in all weather conditions (smoke, fog, clouds, rain, and day/night), backscatter sensitivity to ground and object features, coherent imaging capability, and the ability to transmit/receive polarized radar waves [
25]. Hence, these features are very beneficial for optical and spectral remote sensing systems.
In many remote sensing problems, the scatterers in a volume may have some residual orientation correlation due to the natural structure (branches in a tree canopy, for example) or due to agriculture (oriented corn stalks, for example) [
26]. The propagation of radar signals through such a volume can no longer be assumed to be scalar. In this case, the volume has two special polarizations. If there is some mismatch between the radar coordinates and the medium’s special modes, then a very complicated situation arises where the polarization of the incident field changes as a function of the distance into the volume [
27].
There are also two major types of configurations we can face in POLSAR images: that of a well-oriented district whose entropy and HV backscattering are low and that of an oriented district with a high HV signal and high entropy, especially when estimated spatially. Disorientation in urban areas is not only followed by an addition to the cross-pol signal but also an increase in entropy. Disorientation leads to random mixing of the mechanisms and makes it impossible or at least very difficult to correct the effect of orientation on the double-bounce mechanism. Even if we are able to highlight the presence of this effect, other involved mechanisms remain mixed in the resolution cell. This leads to the common misclassification results, even with orientation effects [
27].
Kajimoto and Susaki [
26] proposed an algorithm that robustly extracts urban areas from POLSAR imag41es. Polarization orientation angle (POA) is utilized in the proposed algorithm. A measure of the POA randomness between neighboring pixels is used to discriminate between urban areas with nearly homogeneous POAs and mountain areas with randomly distributed POAs. Experimental results showed that POA-based categorization and the utilization of POA randomness contribute to improving classification accuracy. Without the use of POA randomness, approximately 50% of mountain areas were misclassified as urban areas. Conversely, the addition of POA randomness succeeded in avoiding such a misclassification.
Many widely used SAR image classification algorithms rely on the combination of hand-designed features and machine learning classifiers, which still experience many issues that remain to be resolved and overcome, including the fuzzy confusion of speckle noise, optimized feature representation, widespread applicability, etc. To mitigate some of the issues and to improve the pattern recognition of high-resolution SAR images, Sun et al. [
28] developed a ConvCRF model combined with a superpixel boundary constraint. An optimizing strategy using a superpixel boundary constraint in the inference iterations more efficiently preserves structural details. The experimental results demonstrated that the proposed method provides competitive advantages over other widely used models. Zhou et al. [
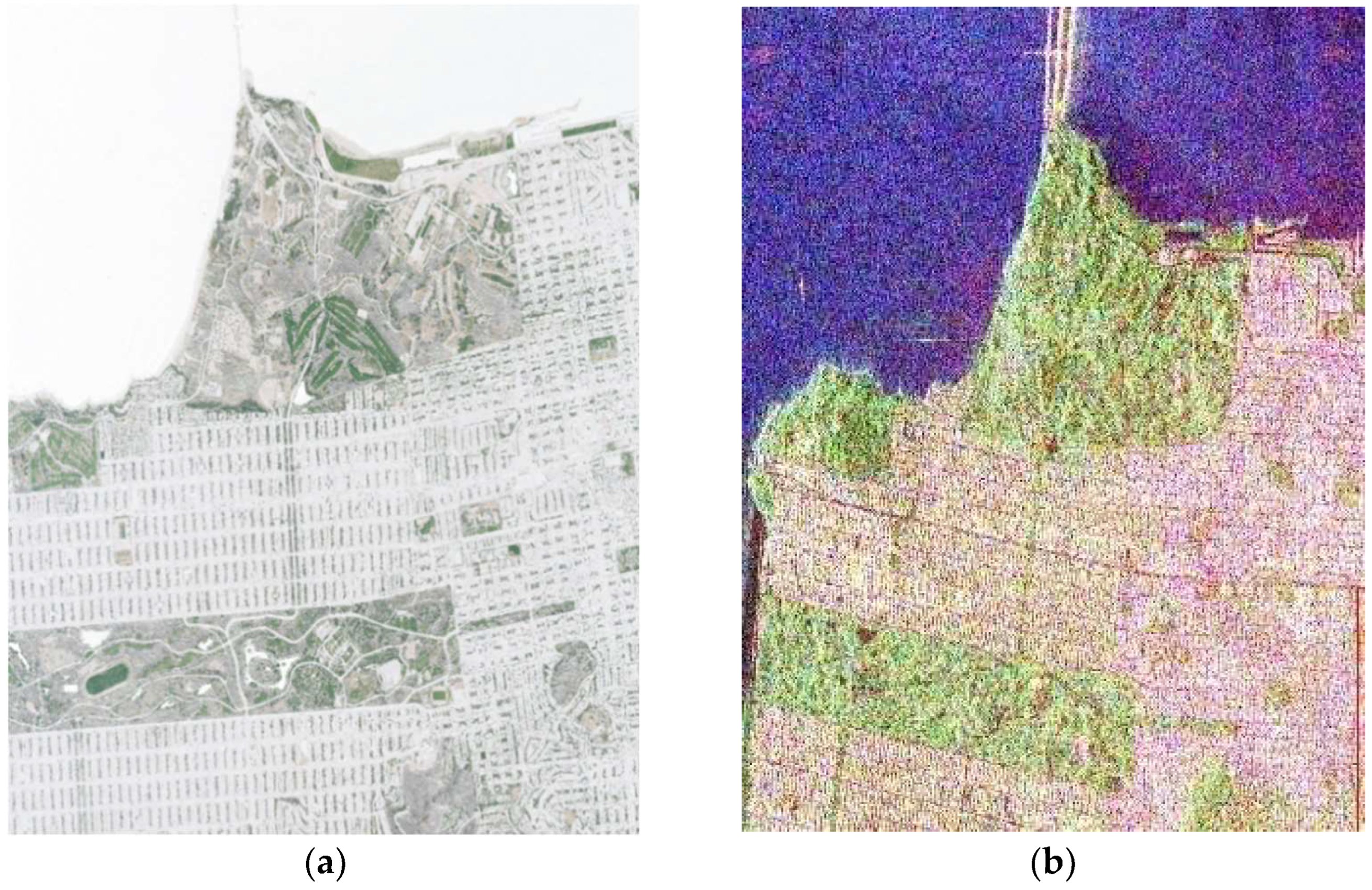
29] used supervised DCNN for POLSAR image classification. With two cascaded convolutional layers, the designed DCNN can automatically learn hierarchical polarimetric spatial features from data. The classification result of the San Francisco case shows that slanted built-up areas, which are conventionally mixed with vegetated areas in polarimetric feature space, can now be successfully distinguished after taking spatial features into account.
Geng et al. [
30] proposed a multi-scale deep feature learning network with bilateral filtering (MDFLN-BF) for SAR image classification, which aims to extract discriminative features and reduce the requirement of labeled samples. MDFLN was also proposed to extract features from SAR images on multiple scales, where the SAR images are stratified into different scales. Experiments showed that the proposed MDFLN-BF is able to yield superior results compared to other related deep networks. Shimoni et al. [
31] developed a logistic regression (LR) as a ‘feature-level fusion’ and a neural network (NN) method (for higher-level fusion) to classify PolSAR and polarimetric interferometry (PolInSAR) images. For comparison, a support vector machine (SVM) was also applied. The results of [
31] showed that, for both the NN and SVM algorithms, the overall accuracy for each of the fused sets was better than the accuracy for the separate feature sets. Moreover, the fused features from different SAR frequencies were complementary and adequate for land-cover classification. PolInSAR was complementary to PolSAR information, and both were essential for producing accurate land-cover classification.
Zhang et al. [
32] proposed a DL-based unsupervised forest height estimation method based on the synergy of the PolInSAR and light detection and ranging (LiDAR) datasets. Unlike traditional PolInSAR-based methods, the proposed method reformulated the forest height inversion as a pan-sharpening process between the low-resolution LiDAR height and the high-resolution PolSAR and PolInSAR features. UAVSAR PolInSAR and LVIS LiDAR data collected over tropical and boreal forest sites were used for experiments. The experimental results show that the proposed method performed well compared to other traditional methods. Biondi [
33] used an improvement of the PolSAR decomposition scheme that permits a more accurate classification. This interferometric polarimetric SAR multi-chromatic analysis (MCA-PolInSAR) method permits the efficient separation of oriented buildings from vegetation, yielding considerably improved results in which oriented urban areas are recognized, from volume scattering, as double-bounce objects. The results also showed a considerable improvement in the robustness of the classification as well as the definition and precision.
In many studies, the combination of meta-heuristic and ML algorithms has been used in order to select the optimal features and improve the classification accuracy of SAR images [
2,
3,
4,
5,
6,
7,
8]. Rostami and Kaveh [
3] used a hybrid biogeography-based optimization support vector machine (HBBOSVM) to classify POLSAR images. In the proposed HBBO, the combination of an onlooker bee and a migration operator was used. Then, SVM was applied for land-cover classification. According to the results, the HBBOSVM had better performance than other algorithms in terms of the convergence trend, overall accuracy, and the kappa coefficient. Salehi et al. [
3] proposed an integration of multi-objective GA, SVM, and an ANN classifier to find the optimal features in order to improve the accuracy of classification using POLSAR images. The aim of that paper [
3] was to minimize the error of classification and the number of selected features. The experimental results of Salehi et al. [
3] showed that the proposed model outperformed the single-objective approaches tested against it while saving computational complexity. Finally, their proposed model [
3] had a better performance than the SVM and the Wishart classifier.
In general, the majority of the abovementioned studies have proven that the integration of meta-heuristic algorithms and ML tools will achieve better accuracy than traditional feature selection. Hence, in this paper, a combined approach of MOBChOA and CNN methods was used for land-cover classification.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}