
Non-Invasive Determination of the Mass Flow Rate for Particulate Solids Using Microwaves


Abstract
:1. Introduction
2. Mass Flow Sensor Design
3. Mass Flow Measurement Overview
4. Sensor Electronics: USRP B210
5. Sliding Mass Technique (SMT): Proposed Concentration Estimation Method
- Step 1:
- The process begins by attaching the sensor to the hose to emulate a practical scenario. The sensor is then connected to a calibrated Vector Network Analyzer (VNA). The Material Under Test (MUT) with a known mass is placed on a platform linked to a linear scale. This scale, inserted through the sensor in small increments of known lengths, records the shift in the transmission S-parameter, , with each increment. This procedure continues from the point the MUT enters the hose until it has completely passed through. This process is illustrated in Figure 7.
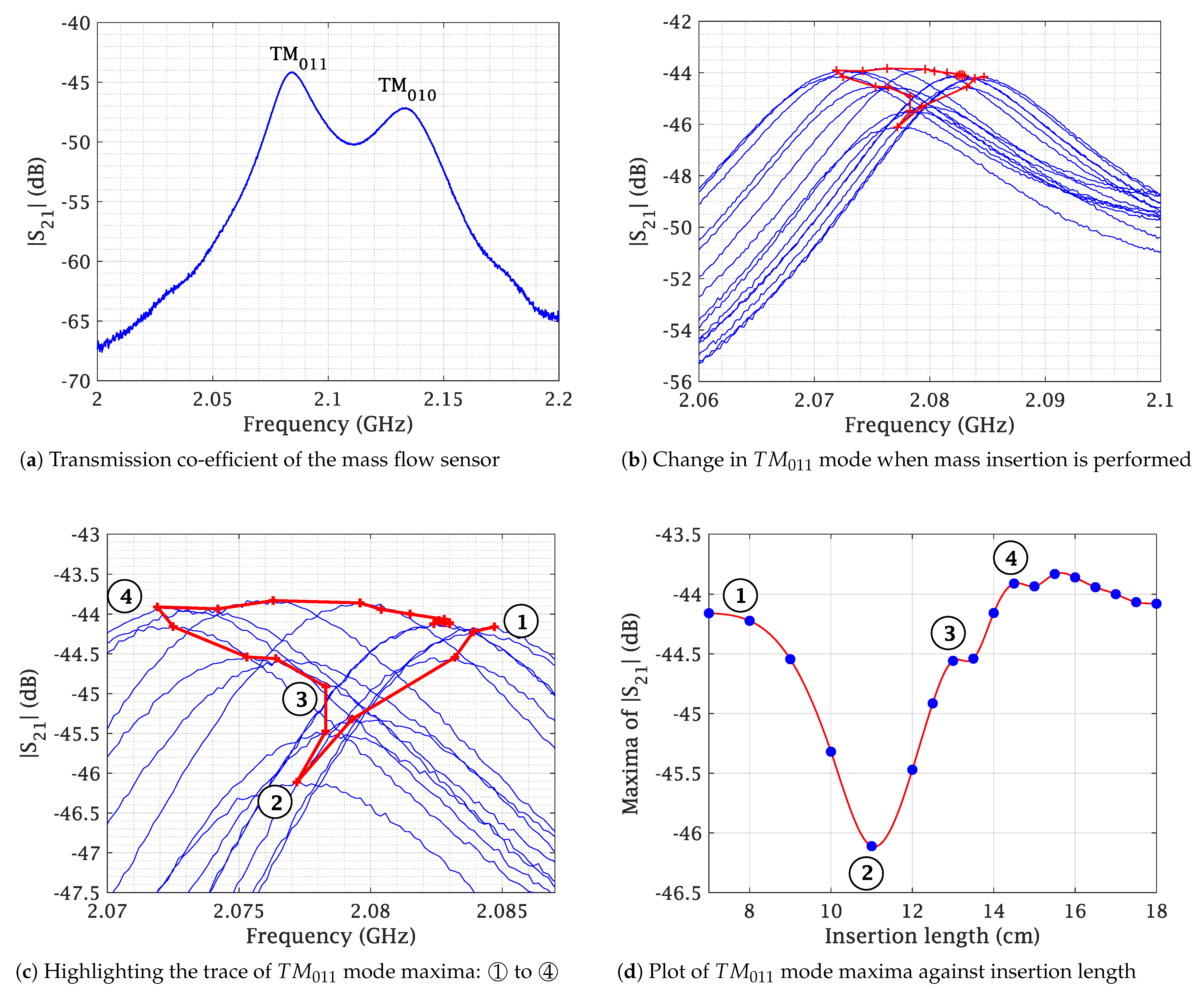
- Step 2:
- Both sensor modes, and , are depicted in Figure 8a. Of these, only the mode is used due to its characteristic of having two E-field maxima. The measurement results for a 10 g wood pellet sample are presented in Figure 8b–d. The 10 g sample, placed on a platform, was slid through the sensor while noting the insertion length, as described in step 1. Changes in during the mass’s movement are shown in Figure 8b, where the red trace indicates the path of the maxima throughout the process. This trace is further highlighted in Figure 8c. The path is marked with numbers from ➀ to ➃. In Figure 8d, the maxima of from each slide are plotted in blue against their respective insertion lengths and interpolated in red.
- Step 3:
- The previous step was repeated for multiple mass samples, and the maxima were plotted against the insertion length in Figure 9, similar to Figure 8d. In Figure 4a, the effective length of the sensor, , is shown, defined by the extent of the E-fields of the mode. It was observed that the sliding of the mass samples added an additional length, , to it. This increase is attributable to the height of the wood pellet sample used in these measurements. As the quantity of the sample increased, so did its height, causing earlier interaction with both E-fields on the insertion length axis. Thus, is equivalent to twice the height of the mass sample for the mode, resembling the slug flow regime in practice, characterized by periods of little to no movement, followed by the rapid passage of a large chunk of material. Acknowledging these unique flow dynamics, we define the ’interaction length’ as the cumulative distance encompassing both and , providing a comprehensive measurement that accounts for the entire span of material interaction within the system. The interaction length is given by . The mean values of the maxima are calculated over the extent of . The greater the mass quantity, the longer and the deeper the curve. The interaction length, , and the corresponding mean of this length are shown in Figure 9 for 5 g, 10 g, 15 g, and 30 g mass samples. It should be noted that the estimation of the extent of and thus the mean of maxima are determined by drawing a line parallel to the x-axis that intersects the curve on either side of the dip at the highest y-axis value. The region under this line is greyed out for clear visibility in Figure 9. For the purpose of comparison, all plots from Figure 9 are superimposed in Figure 10a.
- Step 4:
- The mean value of each mass sample from the previous step is plotted against its corresponding sample mass, and an interpolation curve is generated that passes through these points, as shown in Figure 10b. It is noteworthy that this curve is directly proportional to the relative permittivity of the MUT. This establishes a relationship between the mean power absorption and the MUT’s mass. The mass quantity derived from this relationship will include the interaction length, . Consequently, it can be defined as the mass of the flowing MUT as observed from the limited perspective of a specific mass flow sensor. Due to this specificity, it is denoted by and is relevant only to the sensor it was measured with. Thus, different values may exist for the same wood pellet sample across different mass flow sensors. The interpolated curve from Figure 10b is normalized with the sensor system transmitter power, and the data received are matched to the corresponding values to determine the concentration.
6. Microwave Spatial Filtering Velocimetry: Velocity Determination
7. Mass Flow Rate Determination: Combining SMT and WSFV
8. Materials and Methods
9. Measurement Results and Discussion
10. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MUT | Material Under Test |
| USRP | Universal Software Radio Peripheral |
| SDR | Software-Defined Radio |
| SMT | Sliding Mass Technique |
| WSFV | Microwave Spatial Filtering Velocimetry |
| DAQ | Data Acquisition |
| Tx | Transmitter |
| Rx | Receiver |
References
- Abrar, U.; Shi, L.; Jaffri, N.R.; Short, M.; Hasham, K. Electrical and Mechanical Sensor-Based Mass Flow Rate Measurement System: A Comparative Approach. In Proceedings of the 2020 4th International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 12–24 June 2020; pp. 72–78. [Google Scholar] [CrossRef]
- Gajewski, J.B. Electrostatic Nonintrusive Method for Measuring the Electric Charge, Mass Flow Rate, and Velocity of Particulates in the Two-Phase Gas–Solid Pipe Flows—Its Only or as Many as 50 Years of Historical Evolution. IEEE Trans. Ind. Appl. 2008, 44, 1418–1430. [Google Scholar] [CrossRef]
- Zhao, Y.; Shi, Z.; Wang, S. Solid Mass Flux Measurement of the Gas-Solid Flow Using the Elbow-Ultrasonic. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 349–351. [Google Scholar] [CrossRef]
- O’Mahony, N.; Murphy, T.; Panduru, K.; Riordan, D.; Walsh, J. Acoustic and optical sensing configurations for bulk solids mass flow measurements. In Proceedings of the 2016 10th International Conference on Sensing Technology (ICST), Nanjing, China, 11–13 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Yan, Y.; Wang, X.; Wang, T. Mass flow measurement of two-phase carbon dioxide using coriolis flowmeters. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Rupp, K.; Grunewald, K. Pulverized coal and dust feeding based on the Coriolis-principle. In Proceedings of the 1999 IEEE/-IAS/PCA Cement Industry Technical Conference, Roanoke, VA, USA, 11–15 April 1999; pp. 131–141. [Google Scholar] [CrossRef]
- Doss, E.D. Analysis and application of solid-gas flow inside a venturi with particle interaction. Int. J. Multiph. Flow 1985, 11, 445–458. [Google Scholar] [CrossRef]
- Crabtree, M.A. The Concise Industrial Flow Measurement Handbook, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Bi, H.T.; Grace, J.R. Flow regime diagrams for gas-solid fluidization and upward transport. Int. J. Multiph. Flow 1995, 21, 1229–1236. [Google Scholar] [CrossRef]
- Guo, Z.; Zhang, G. Application of a Microwave Mass Flow Meter in a Dense Phase Pneumatic Conveying System of Pulverized Coal. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 2547–2551. [Google Scholar] [CrossRef]
- Schueler, M.; Mandel, C.; Puentes, M.; Jakoby, R. Metamaterial Inspired Microwave Sensors. IEEE Microw. Mag. 2012, 13, 57–68. [Google Scholar] [CrossRef]
- Caloz, C.; Itoh, T. Electromagnetic Metamaterials: Transmission Line Theory and Microwave Applications, 1st ed.; Wiley-IEEE Press: New York, NY, USA, 2005. [Google Scholar]
- Wu, J.; Yuan, T.; Liu, J.; Qin, J.; Hong, Z.; Li, J.; Du, Y. Terahertz Metamaterial Sensor With Ultra-High Sensitivity and Tunability Based on Photosensitive Semiconductor GaAs. IEEE Sens. J. 2022, 22, 15961–15966. [Google Scholar] [CrossRef]
- Soffiatti, A.; Max, Y.; Silva, S.G.; de Mendonça, L.M. Microwave Metamaterial-Based Sensor for Dielectric Characterization of Liquids. Sensors 2018, 18, 1513. [Google Scholar] [CrossRef] [PubMed]
- Penirschke, A.; Puentes, M.; Maune, H.; Schussler, M.; Gaebler, A.; Jakoby, R. Microwave mass flow meter for pneumatic conveyed particulate solids. In Proceedings of the 2009 IEEE Instrumentation and Measurement Technology Conference, Singapore, 5–7 May 2009; pp. 583–588. [Google Scholar] [CrossRef]
- Penirschke, A.; Jakoby, R. Microwave Mass Flow Detector for Particulate Solids Based on Spatial Filtering Velocimetry. IEEE Trans. Microw. Theory Tech. 2008, 56, 3193–3199. [Google Scholar] [CrossRef]
- Pollock, J.G.; Iyer, A.K. Experimental Verification of Below-Cutoff Propagation in Miniaturized Circular Waveguides Using Anisotropic ENNZ Metamaterial Liners. IEEE Trans. Microw. Theory Tech. 2016, 64, 1297–1305. [Google Scholar] [CrossRef]
- Penirschke, A.; Angelovski, A.; Jakoby, R. Moisture insensitive microwave mass flow detector for particulate solids. In Proceedings of the 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings, Austin, TX, USA, 3–6 May 2010; pp. 1309–1313. [Google Scholar] [CrossRef]
- Zheng, G.; Yan, Y.; Hu, Y.; Zhang, W.; Yang, L.; Li, L. Mass-flow-rate measurement of pneumatically conveyed particles through acoustic emission detection and electrostatic sensing. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- de Oliveira, A.C.; Pan, S.; Wiegerink, R.J.; Makinwa, K.A. A MEMS coriolis-based mass-flow-to-digital converter for low flow rate sensing. IEEE J.-Solid-State Circuits 2022, 57, 3681–3692. [Google Scholar] [CrossRef]
- Wang, C.; Jia, L.; Ye, J. Characterization of particle mass flow rate of gas–solid two-phase flow by the combination of transferred and induced current signals. IEEE Trans. Instrum. Meas. 2021, 70, 7501912. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This Work | [19] | [20] | [10] | [3] | [4] | [21] | [16] | |
|---|---|---|---|---|---|---|---|---|
| Purpose | Solids/gases | Solids/gases | Solids/gases | Pulverised solids/gases | Solids/gases | Solids/gases | Solids/gases | Solids/gases |
| Operating principle | Microwave coupler | Acoustic and Electrostatic | MEMS and Capacitive | Microwave antenna | Elbow and Ultrasonic | Acoustic | Electrostatic | Microwave coupler |
| Velocity Detection | Microwave Spatial Filtering Velocimetry | Multiple channel cross-correlation | Coriolis: Direct Mass Flow Detection | Multiple channel cross-correlation | Force Vortex | Multiple channel cross-correlation | Waveform Charact-eristics in Time Domain | Microwave Spatial Filtering Velocimetry |
| Concen-tration-Detection | Sliding Mass Technique | Collision with Electrode | Concentr-ation meter | Pressure difference | Cross-correlation | Collision with Electrode | Phase Shift | |
| Non-Invasive Sensing | Yes | No | Yes | Yes | No | No | No | Yes |
| Number of sensing elements | 1 | 2 | 1 | 6 | 2 | 1 | 2 | 2 |
| Grounding for ESD Protection | Yes | No | N.A. | No | N.A. | N.A. | No | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zoad, A.; Koelpin, A.; Penirschke, A. Non-Invasive Determination of the Mass Flow Rate for Particulate Solids Using Microwaves. Sensors 2023, 23, 9821. https://doi.org/10.3390/s23249821
Zoad A, Koelpin A, Penirschke A. Non-Invasive Determination of the Mass Flow Rate for Particulate Solids Using Microwaves. Sensors. 2023; 23(24):9821. https://doi.org/10.3390/s23249821
Chicago/Turabian StyleZoad, Amrit, Alexander Koelpin, and Andreas Penirschke. 2023. "Non-Invasive Determination of the Mass Flow Rate for Particulate Solids Using Microwaves" Sensors 23, no. 24: 9821. https://doi.org/10.3390/s23249821