
Stitching Locally Fitted T-Splines for Fast Fitting of Large-Scale Freeform Point Clouds

 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. State-of-the-Art Algorithm Analyses
2.1. T-Spline Fundamentals
2.2. Global T-Spline Fitting
2.3. Local T-Spline Fitting
2.4. Split-Connect Fitting
- Independent patch split: Iteratively fit an input point cloud to simple, small, and independent Bézier- or B-spline patches until a pre-set error threshold is achieved. Each spline patch corresponds to a rectangular grid of different sizes in a parameter domain. This step is similar to the refinement iteration of a global or local fitting scheme. The core difference is that the obtained patches here are topologically independent, i.e., the local support of a CP regarding its neighbor patches is neglected, and thus, the fitting of all the separate patches can be very fast.
- Patch connection: Connect independent spline patches to a T-mesh with a prescribed continuity according to actual data continuity (to avoid missing data problems) and infer the knot vectors of all CPs.
- T-spline fitting: Calculate the T-spline CPs. Since CPs have been obtained in the first step, though they are inaccurate, optimization of the CPs using a preconditioned conjugate gradient (PCG) algorithm [31] has proven to be remarkably faster than general least squares.
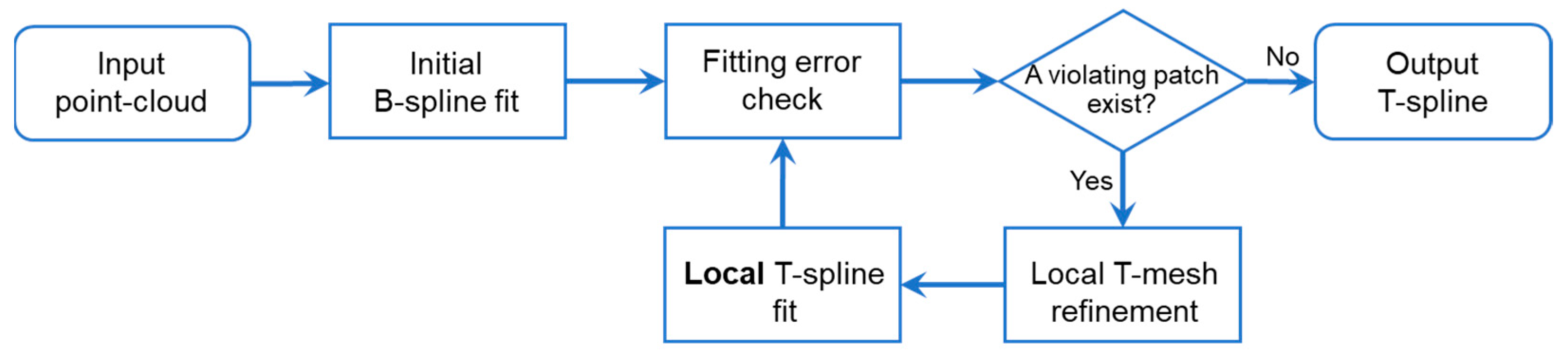
3. LAST Fitting
3.1. Local Patch Segmentation
3.2. Locally Accelerated T-Spline Fitting
- 1.
- T-spline initialization
- 2.
- Tolerance check
- 3.
- Local refinement
- 4.
- Local fitting
3.3. Locally Optimized T-Spline Stitching
4. Experiments
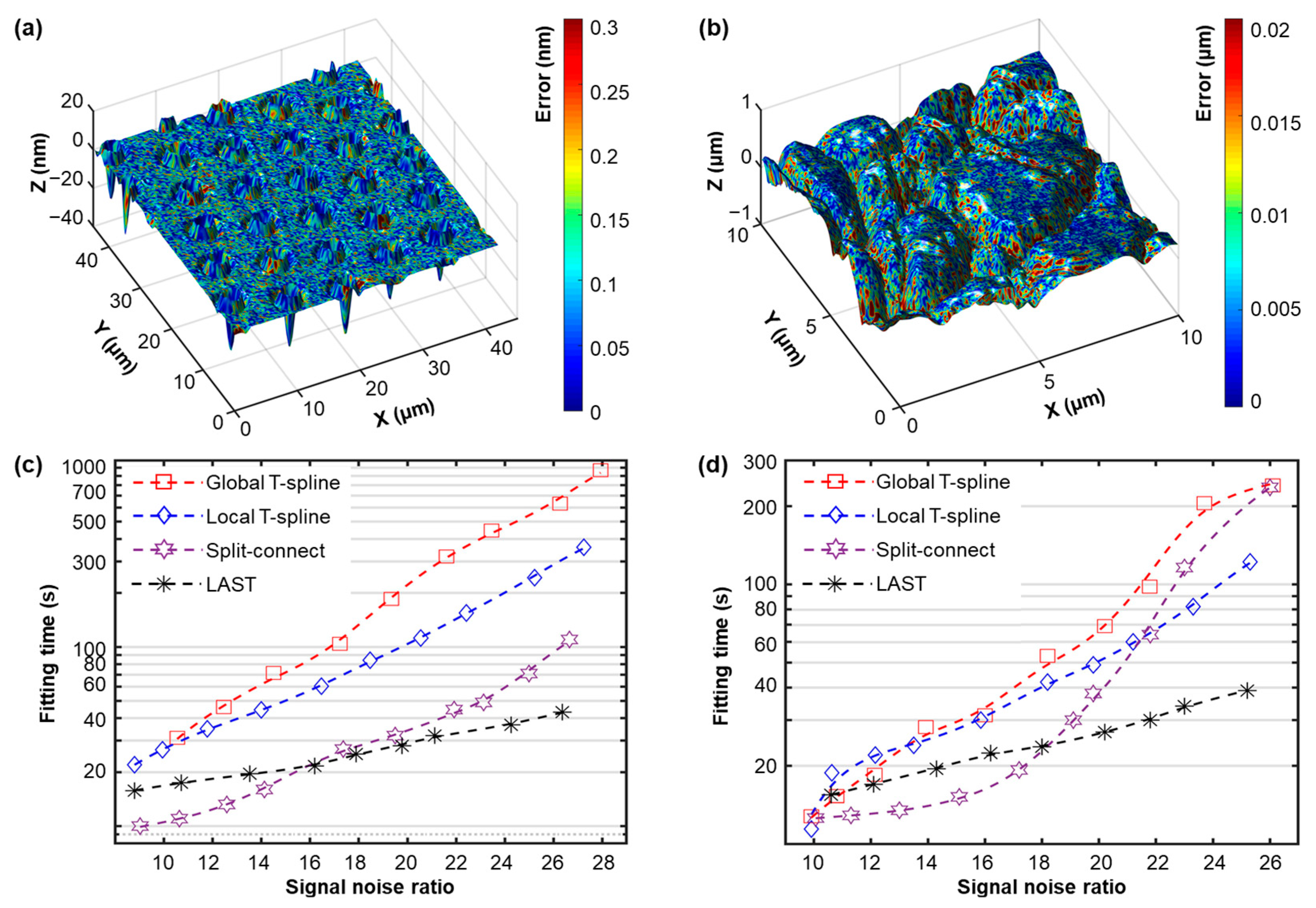
4.1. High-Accuracy Fitting
4.2. Large-Scale Fitting
4.3. Lena Image Comparison
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rusinkiewicz, S.; Hall-Holt, O.; Levoy, M. Real-time 3D model acquisition. ACM Trans. Graph. 2002, 3, 438–446. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S.O. Accuracy and resolution of Kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Nan, Z.; Tao, W.; Zhao, H.; Lv, N. A fast laser adjustment-based laser triangulation displacement sensor for dynamic measurement of a dispensing robot. Appl. Sci. 2020, 10, 7412. [Google Scholar] [CrossRef]
- Arnold, E.; Al-Jarrah, O.Y.; Dianati, M. A survey on 3D object detection methods for autonomous driving applications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3782–3795. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A review of multi-sensor fusion SLAM systems based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]
- Xie, X.; Wei, H.; Yang, Y. Real-time LiDAR point-cloud moving object segmentation for autonomous driving. Sensors 2023, 23, 547. [Google Scholar] [CrossRef]
- Hong, J.; Kim, K.; Lee, H. Faster dynamic graph CNN: Faster deep learning on 3D point cloud data. IEEE Access 2020, 8, 190529–190538. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Lu, W.; Jiang, X. High-accuracy calibration of high-speed fringe projection profilometry using a checkerboard. IEEE-ASME Trans. Mechatron. 2022, 27, 4199–4204. [Google Scholar] [CrossRef]
- Zuo, C.; Qian, J.; Feng, S.; Yin, W.; Li, Y.; Fan, P.; Han, J.; Qian, K.; Chen, Q. Deep learning in optical metrology: A review. Light-Sci. Appl. 2022, 11, 39. [Google Scholar] [CrossRef]
- Wang, J.; Zou, R.; Colosimo, B.M.; Lu, W.; Xu, L.; Jiang, X. Characterisation of freeform, structured surfaces in T-spline spaces and its applications. Surf. Topogr.-Metrol. Prop. 2021, 9, 025003. [Google Scholar] [CrossRef]
- Straathof, M.H.; van Tooren, M.J.L. Extension to the class-shape-transformation method based on B-splines. AIAA J. 2011, 49, 780–790. [Google Scholar] [CrossRef]
- Unser, M. Splines: A perfect fit for signal and image processing. IEEE Signal Process. Mag. 2002, 16, 22–38. [Google Scholar] [CrossRef]
- Piegl, L.A.; Tiller, W. The NURBS Book, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Patrizi, F.; Manni, C.; Pelosi, F.; Speleers, H. Adaptive refinement with locally linearly independent LR B-splines: Theory and applications. Comput. Meth. Appl. Mech. Eng. 2020, 369, 113230. [Google Scholar] [CrossRef]
- Bracco, C.; Giannelli, C.; GroβMann, D.; Sestini, A. Adaptive fitting with THB-splines: Error analysis and industrial applications. Comput. Aided Geom. Des. 2018, 62, 239–252. [Google Scholar] [CrossRef]
- Sederberg, T.W.; Zheng, J.; Bakenov, A.; Nasri, A. T-splines and T-NURCCs. ACM Trans. Graph. 2003, 22, 477. [Google Scholar] [CrossRef]
- Sederberg, T.W.; Cardon, D.L.; Finnigan, G.T.; North, N.S.; Zheng, J.; Lyche, T. T-Spline simplification and local refinement. ACM Trans. Graph. 2004, 23, 276. [Google Scholar] [CrossRef]
- Kang, H.; Chen, F.; Deng, J. Modified T-splines. Comput. Aided Geom. 2013, 30, 827–843. [Google Scholar] [CrossRef]
- Scott, M.A.; Li, X.; Sederberg, T.W.; Hughes, T.J.R. Local refinement of analysis-suitable T-splines. Comput. Meth. Appl. Mech. Eng. 2012, 213, 206–222. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, Y.; Liu, L.; Hughes, T.J.R. Truncated T-splines: Fundamentals and methods. Comput. Meth. Appl. Mech. Eng. 2017, 316, 349–372. [Google Scholar] [CrossRef]
- Ni, Q.; Wang, X.; Deng, J. Modified PHT-splines. Comput. Aided Geom. 2019, 73, 37–53. [Google Scholar] [CrossRef]
- Wei, X.; Li, X.; Qian, K.; Hughes, T.; Casquero, H. Analysis-suitable unstructured T-splines: Multiple extraordinary points per face. Comput. Meth. Appl. Mech. Eng. 2022, 391, 114494. [Google Scholar] [CrossRef]
- Gupta, A.; Mamindlapelly, B.; Karuthedath, P.L.; Chowdhury, R.; Chakrabarti, A. Adaptive isogeometric topology optimization using PHT splines. Comput. Meth. Appl. Mech. Eng. 2022, 395, 114993. [Google Scholar] [CrossRef]
- Doerfel, M.R.; Juettler, B.; Simeon, B. Adaptive isogeometric analysis by local h-refinement with T-splines. Comput. Meth. Appl. Mech. Eng. 2010, 199, 264–275. [Google Scholar] [CrossRef]
- Zheng, J.; Wang, Y.; Seah, H.S. Adaptive T-spline surface fitting to z-map models. In Proceedings of the 3rd International Conference on Computer Graphics and Interactive Techniques, Australasia and South East Asia, Dunedin, New Zealand, 29 November–2 December 2005. [Google Scholar]
- Wang, Y.; Zheng, J. Curvature-guided adaptive -spline surface fitting. Comput.-Aided Des. 2013, 45, 1095–1107. [Google Scholar] [CrossRef]
- Wang, J.; Lu, Y.; Ye, L.; Chen, R.; Leach, R. Efficient analysis-suitable T-spline fitting for freeform surface reconstruction and intelligent sampling. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2020, 66, 417–428. [Google Scholar] [CrossRef]
- Giannelli, C.; Jüttler, B.; Speleers, H. THB-splines: The truncated basis for hierarchical splines. Comput. Aided Geom. 2012, 29, 485–498. [Google Scholar] [CrossRef]
- Chen, L.; de Borst, R. Adaptive refinement of hierarchical T-splines. Comput. Meth. Appl. Mech. Eng. 2018, 337, 220–245. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Du, X.; Zhao, G. An efficient data structure for calculation of unstructured T-spline surfaces. Vis. Comput. Ind. Biomed. Art. 2019, 2, 2. [Google Scholar] [CrossRef]
- Lin, H.; Zhang, Z. An Efficient Method for Fitting Large Data Sets Using T-Splines. SIAM J. Sci. Comput. 2013, 35, A3052–A3068. [Google Scholar] [CrossRef]
- Kermarrec, G.; Morgenstern, P. Multilevel T-spline approximation for scattered observations with application to land remote sensing. Comput.-Aided Des. 2022, 146, 103193. [Google Scholar] [CrossRef]
- Feng, C.; Taguchi, Y. FasTFit: A fast T-spline fitting algorithm. Comput. Aided Des. 2017, 92, 11–21. [Google Scholar] [CrossRef]
- Wang, J.; Leach, R.; Chen, R.; Xu, J.; Jiang, X. Distortion-Free Intelligent Sampling of Sparse Surfaces Via Locally Refined T-Spline Metamodelling. Int. J. Precis. Eng. anuf. Gr Tech. 2020, 8, 16. [Google Scholar] [CrossRef]
- Lu, Z.; Jiang, X.; Huo, G.; Ye, D.; Wang, B.; Zheng, Z. A fast T-spline fitting method based on efficient region segmentation. Comput. Appl. Math. 2020, 39, 55. [Google Scholar] [CrossRef]
- Meng, T.; Choi, G.; Lui, L. TEMPO: Feature-endowed teichmüller extremal mappings of point clouds. SIAM J. Imaging Sci. 2016, 9, 1922–1962. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Bi, S.; Liu, W.; Zhou, L.; Li, T.; Macleod, I.; Leach, R. Stitching Locally Fitted T-Splines for Fast Fitting of Large-Scale Freeform Point Clouds. Sensors 2023, 23, 9816. https://doi.org/10.3390/s23249816
Wang J, Bi S, Liu W, Zhou L, Li T, Macleod I, Leach R. Stitching Locally Fitted T-Splines for Fast Fitting of Large-Scale Freeform Point Clouds. Sensors. 2023; 23(24):9816. https://doi.org/10.3390/s23249816
Chicago/Turabian StyleWang, Jian, Sheng Bi, Wenkang Liu, Liping Zhou, Tukun Li, Iain Macleod, and Richard Leach. 2023. "Stitching Locally Fitted T-Splines for Fast Fitting of Large-Scale Freeform Point Clouds" Sensors 23, no. 24: 9816. https://doi.org/10.3390/s23249816