1. Introduction
Vehicle-to-vehicle (V2V) communication is a promising yet challenging aspect of vehicular networks and future intelligent transportation systems (ITS) [
1]. V2V communication performance is crucial for several safety-critical vehicular applications, (e.g., platooning [
2] or cooperative adaptive cruise control (CACC) [
3], which rely on advanced vehicle networking capabilities to improve transportation efficiency and road safety).
Multiple-input multiple-output (MIMO) systems are one of the prospective upgrades to be implemented in future connected vehicles [
4] (including platoons and CACC), with the aim of improving channel capacity and reliability with minimum spectrum efficiency losses. MIMO theory and its applications are, in fact, a well-known subject in wireless communications [
5], offering vast practical and theoretical knowledge with proven technological success.
Specifically, space-time block codes (STBCs) constitute a classical approach to achieve transmit diversity in MIMO systems. In particular, the pioneering work of Alamouti in [
6] proposed an effective and low-complexity pre-coding/decoding scheme using resources in time (time slots) and space (antennas) that paved the way for several other coding techniques that achieved efficient diversity at the transmitter side, notably obtaining performance results that were equivalent to a maximum-ratio combining (MRC) receiver [
7].
While the advantages of STBCs in conventional stochastic fading channels are relatively well understood, their potential to counteract fading due to the combined effect of deterministic ground reflections and fast-fading (time-varying) channels has not been fully explored for vehicular applications, a challenge we attempt to address in this paper.
Based on the theory of the two-ray model, ground reflections introduce interference patterns mainly when the angle of reflection is lower than a critical value. At this critical point, the phenomena of total reflection creates a deep fade. In the region of distances or angles beyond the main deep fade, the path-loss exponent changes creating a relative absence of fades. This means that ground reflections will have their main impact in scenarios with angles below the critical point, which in turn means with reduced inter-vehicular distance and/or increased height of the antennas.
Channel time variability is commonly introduced in wireless networks as a function of the Doppler frequency. The Doppler frequency is directly connected to an increase in the speed of the vehicle but also to the increase of operational frequency and/or reduction of transmission periods. Therefore, in practical scenarios, we expect to have deterministic ground reflections and higher Doppler for shorter distances between vehicles, increased vehicle speeds, and also in environments dominated by scattering, such as in urban and dense urban scenarios.
In this article, we investigate the performance of STBCs in V2V MIMO links scenarios considering the combined effect of ground reflections and fast-fading vehicular channels (see e.g., [
8,
9] for further motivations). More concretely, this work is an extension of the conference paper in [
10], which focused exclusively on deterministic V2V channels with ground reflections. This means our previous work ignored stochastic scattering. In this work, to make the channel more realistic, we introduce a stochastic component with a double scattering distribution that is typical in V2V geometrical-based stochastic models. The end result is a V2V MIMO time-variant channel model with double fading and a LOS deterministic component that explicitly considers ground reflections.
The deterministic analysis is built upon our prior work in [
11], where we first established a V2V channel model to account for those self-interference patterns that appear when using multiple antennas in the presence of specular ground reflections. The stochastic model is replicated from another work [
12] that accounts for a set of distributed scatterers around each vehicle, with the signal model being the result of a double interaction between these two sets of scatterers.
More importantly, the main results here presented indicate that under these channel conditions, time variability introduces a self-interference term that destroys the orthogonality of the codes, thus reducing performance. The objective of our study is thus to evaluate to what extent performance is reduced due to this impairment and if communication can still occur under these circumstances.
To verify the above inquiry, STBCs of various coding rates are evaluated across a range of inter-vehicle distances for different assumptions of Rice factor and Doppler shifts. The results show that for moderate vehicle speeds and for high values of the Rice factor, the performance of STBCs still remains a good option for vehicular communications despite the loss of orthogonality. However, the achieved performance can be rapidly degraded once the optimum range of conditions changes.
The organization of this paper is as follows.
Section 2 provides some related works and motivation.
Section 3 presents the channel model containing deterministic and stochastic components. This means it presents the evaluation of the combined effects of ground reflections and high Doppler freqeuncies.
Section 4 introduces the generic MIMO signal model, including the example of the conventional Alamouti scheme for 2 × 1 MIMO systems for links with double fading, a conventional LOS component, and time-variant channels.
Section 5 presents the modeling assumption for high-performance metrics of general STBCs of different order. Then,
Section 6 discusses the results of simulation and distributions for a number of scenarios considering the previous results for LOS channel models (i.e., no scattering) and statistics of signal-to-noise-plus-interference (SINR) ratio that arise in time-variant channels (scattering + LOS). Finally,
Section 7 provides conclusions.
2. Related Work and Motivation
MIMO technology lies at the core of improved connectivity for the next generation of wireless communication systems [
13]. STBCs are simple but rather powerful MIMO solutions with still unexplored performance in vehicular applications. A number of works justify the use of MIMO using deterministic LOS channels for V2V applications [
8,
9,
14,
15]. In this context, our previous work in [
10] explored the impact of ground reflections on the deterministic fading distribution of the MIMO V2V channel. To the best of our knowledge, this has been addressed partially in [
16], but without considering its impact on capacity performance.
However, there are practically no experimental or theoretical approaches to study how these two issues that can appear simultaneously in vehicular networks can affect performance: ground reflections and increased Doppler frequency. Accordingly, our work points towards this direction by proposing a hybrid model with deterministic ground ray reflections and a stochastic scattering model that induces time variations and fading in the channel distribution.
To summarize, we consider the main contributions of this paper (as the extension of the conference paper in [
11]) to be the following:
To investigate the performance of STBC codes for V2V MIMO when the time-variant channel component affects the orthogonality of the codes;
To provide a model for the interaction of two-channel components: the deterministic (a modified LOS with multiple ground reflections) and the stochastic component (a model based on rings of scatterers around both vehicles).
Notation. Scalar variables are denoted by lowercase letters. The variable i represents the imaginary number , is the statistical average operator, and denotes a complex circular Gaussian distribution with mean and variance . Vector and matrix variables are denoted, respectively, by bold lowercase and capital letters. and denote, respectively, the conventional vector and the Hermitian vector transpose operators. The probability density (PDF) and cumulative density function (CDF) of a random variable X are denoted, respectively, by and .
3. V2V Channel Model
Consider the V2V scenario depicted in
Figure 1 where each vehicle contains two horizontal uniform linear arrays of
N antennas each. The first array is placed at the rooftop of each vehicle, while the other is at the corresponding front (or rear) part (bumper) of the vehicle. The arrays are thus mirrored in the contiguous vehicle, with
antennas by car, where
and
are, respectively, the total number of transmit and receive antennas. The configuration can be better understood by looking at
Figure 1, where one array of 4 antennas is located at the rooftop of each vehicle, and a second array is located in the front or rear bumper of the vehicle, depending on whether communication takes place with the vehicle in front or behind. Note that all arrays contain the same number of elements
N. The channel between any of the
jth and
kth antenna elements at time
t is denoted as
and is defined as the contribution of the deterministic and the stochastic component (i.e.,
). The deterministic component contains the original LOS (line-of-sight) component and also all the deterministic ground reflections.
3.1. Deterministic V2V Channel Component (LOS+Ground Reflections)
Let us assume that
is described by the classical two-ray model. Note that in the related literature, this propagation model has been recognized as a good predictor of the received signal strength in V2V deterministic links [
17,
18]. Formally, we consider this channel component to be described as in [
11]:
where
and
, are, respectively, the direct and ground reflected electric distances computed as a function of
and
, the distance of the respective LOS and ground reflected path.
is the average Tx power per symbol, and
and
are the respective Tx and Rx antenna gains.
is the operational wavelength,
, and
is the reflection coefficient, which can be formally expressed as follows (modification of [
19]):
where
and
for vertical polarization, and
and
for horizontal polarization.
is the angle of reflection;
and
denote, respectively, the real and imaginary parts of the complex refractive index of ground
, given by
, where
c is speed of light; and
and
denote, respectively, the relative permittivity and conductivity of the asphalt pavement [
20].
3.2. Stochastic V2V Channel Component
The stochastic channels will be modelled as random processes with double scatterer interaction. The model employs a sum of sinusoid signals created by a set of uniformly distributed scatterers around both of the vehicles. The difference in the angle of arrivals (AoAs) to different antenna elements defines the correlation statistics of the multiple antenna model. This can be written mathematically as follows [
12]:
where
is a normalization factor,
is the maximum Doppler frequency,
v is the vehicle speed,
is the angle of departure (AoD) for ray
u from antenna
j,
is the AoA of ray
w in antenna
k, and
is a random phase. The Rice factor is defined as the ratio of the power in the line-of-sight component to the average power in the stochastic component:
.
This paper focuses on how an increase in Doppler frequency can affect the orthogonality of STBCS and therefore reduce their ability to counteract fades. From the previous formula of Doppler frequency, an increased value of can be obtained either by increasing the vehicle speed or the operational frequency or by reducing the transmission period. The double scattering model is an extension of the well-known Jakes’ model used in SISO (single-input single-output) systems adapted to a V2V MIMO setting. Therefore, the model is a theoretical tool we use to investigate the effects of a time-varying channel. In real life, scattering distributions may differ, and other effects might affect the statistics of double scattering interaction models.
4. MIMO Model
Considering a space-time block code mapping a set of
symbols to
transmit antennas over a set of
M time slots, the MIMO model in the time slot
m considering
transmit antennas and
receiving antennas can be defined as
where
is the vector of transmitted symbols across the different antennas, and
the vector of a zero-mean additive circular complex Gaussian noise
).
is the MIMO channel matrix of size
, which corresponds to the transpose matrix formed by the elements
,
is the vector of received symbols in the time slot
m, and
and
denote, respectively the vector of zeros and the identity matrix of order
n.
Given the code rate R defined as , the mapping of the symbols to the antennas in different time slots can also be represented with a single matrix of individual elements , where m and j denote the respective time and Tx antenna indexes.
Alamouti Code
The particular case of Alamouti [
6] coding for a
system uses the following encoding matrix:
Considering the channel for this case as
and
, the received signal can be written as follows:
The received signals can thus be rewritten as follows:
Let us now use the combining mechanism of the Alamouti decoding process [
6]:
We can observe that the time-variant channel introduces an interference term in the desired symbol
. This is the main effect that will be investigated in this paper, as well as how the time-variance of the channel can degrade the orthogonality of STBCs. The SINR (signal-to-interference-plus-noise ratio) is thus given by:
Let us now reformulate the cross-channel dependencies. These dependencies can be approximated by the following linear correlation model:
,
,
and
, where
represents the deterministic component,
represents a temporal correlation coefficient, and
,
,
,
are i.i.d complex Gaussian random variables with variance
. By substituting the above expressions in (
7), the SINR expression reduces to:
where
, and
. Furthermore, when the channel model drops the line-of-sight component, the SINR expression becomes:
where
is a double Rayleigh random variable with variance
. An approximation of the SINR expression is proposed here where the interference term depends on the deviation between temporal components:
where
, and
.
Figure 2 shows the CDF statistics of the Alamouti receiver considering a double Rice link with
dB and different values of the temporal correlation coefficient.
Figure 3 shows the results using a Rice factor of 5 dB. In both cases, the x-axis is the SINR value (
) in linear scale. We can observe that the effects of increased Doppler tend to degrade SINR performance, but this degrading effect seems to be only evident for low values of the temporal correlation coefficient. This suggests that the Alamouti algorithm could be resilient to a moderate increase of Doppler frequency. In all results, we assume a simple line-of-sight component with random phase. In all the results, we have used double scattering statistics.
7. Conclusions
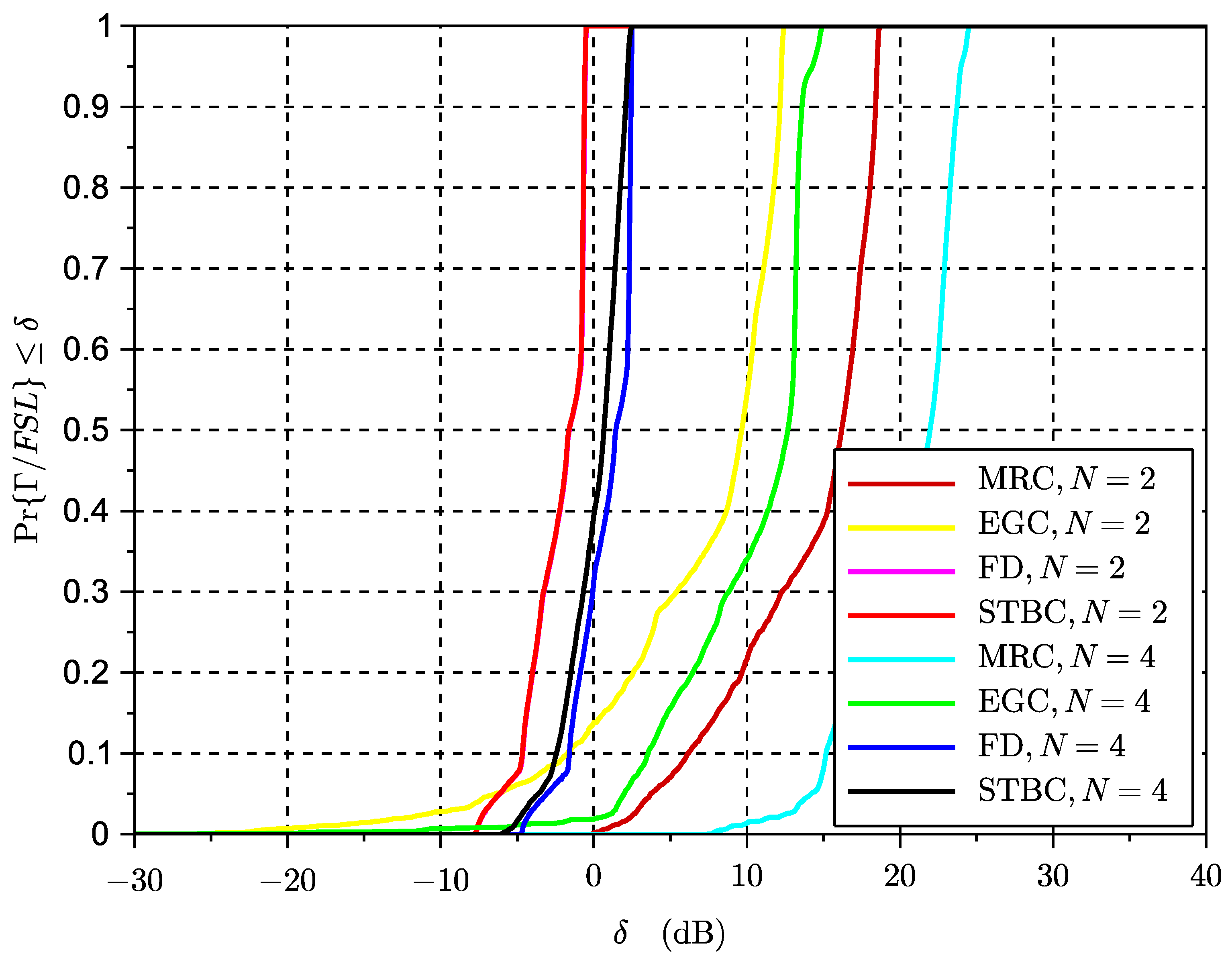
This paper has presented the performance analysis of orthogonal space-time block codes in V2V MIMO channels with two particular issues: ground reflections that affect the LOS component and time-variant channels that destroy the code orthogonality. These two impairments are expected to appear in scenarios with higher vehicle speed, reduced inter-vehicular distances, and in dense urban environments with rich scattering distributions. The results show that STBCs can suffer severe degradation in high-Doppler scenarios (higher vehicular speeds, higher operational frequency, or shorter transmission periods), but this effect can be reduced by an increase of the Rice factor and also an increase in the number of antennas used over the vehicles. In the pure LOS regime, STBCs can provide capacity gains over single-antenna systems as well as reduce the effects of self-interference produced by ground reflections. Moreover, when compared to conventional SIMO solutions using EGC and MRC schemes, STBC seems to perform rather poorly (on average) regarding outage probability for different values of performance ratio with respect to the FSL solution. However, a closer look at the performance of the solutions in the case of outage for high Rice factors reveals that STBC provides gains in performance with respect to MRC and, particularly, with respect to EGC when these solutions are in outage. This implies that STBC is an attractive candidate to counteract deep fades and provide a more stable signal level (here against self-interference patterns), but at the same time, it cannot provide the maximum signal peaks as compared to MRC or EGC. Another conclusion is that despite losses in code rates, STBC in combination with multiple antenna receivers can provide important capacity gains for the LOS components when affected by ground reflections.
Higher-order STBCs provide a higher degree of rejection to deep fades. However, in time-variant channels, their performance degrades faster. Therefore, the conclusion is to use low-order STBCs in fast-fading channels. Our results aim to help in the design and optimization of the vehicular networks of the future by predicting the behavior of different types of MIMO solution and under which circumstances they provide desired gains.
Future work includes the validation on experimental testbeds for STBCs in V2V MIMO and the experimentation of STBCs.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











