

A Nested–Nested Sparse Array Specially for Monostatic Colocated MIMO Radar with Increased Degree of Freedom
Abstract
:1. Introduction
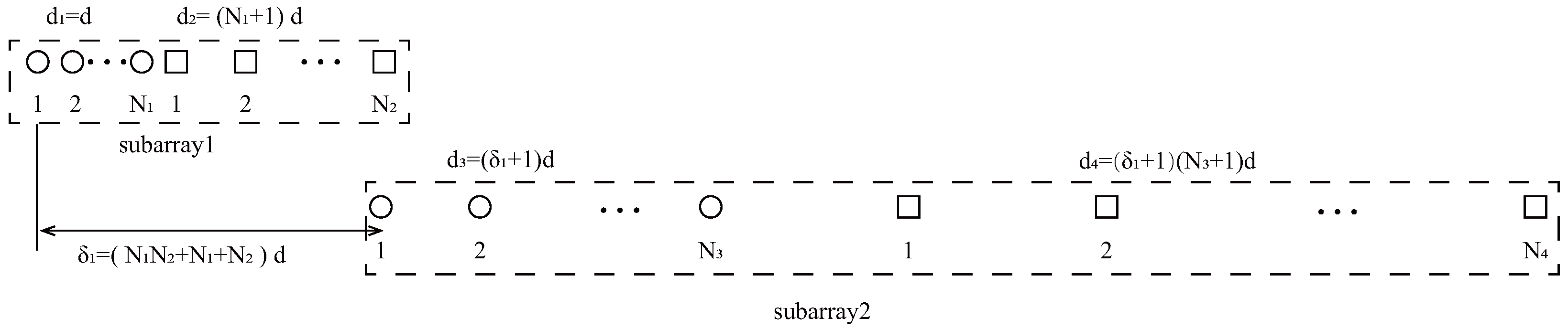
- We propose a sparse MIMO array configuration called NNSA, which is composed of two subarrays: a NA and a sparse NA, respectively. The basic idea of designing NNSA is based on the property of NA.
- Considering that it is complicated to obtain a consecutive 2-DCSC from physical sensors directly, we optimize the design process by simplifying it into two steps: extracting the consecutive DOFs in 2-SC from physical sensors and subsequently calculating the 2-DC of 2-SC to obtain a consecutive virtual 2-DCSC as long as possible. This step-by-step simplification enhances the efficiency of designing NNSA. Moreover, given the total number of physical sensors T, it is specified how to select , , , and to accomplish the maximal consecutive DOFs.
- Comparing NNSA with other arrays, we assess the ability of NNSA in DOA estimation. The simulation results confirm the superior properties of NNSA. The proposed NNSA enjoys increased consecutive DOFs, larger array aperture, weaker mutual coupling effect and smaller error in DOA estimation.
2. Preliminaries
2.1. Related Definitions
2.2. Signal Model
3. Proposed Array Configuration
3.1. Design of the Proposed Array
3.2. A Specific Example of NNSA
3.3. Design Procedures
4. Performance Comparison
5. Simulations Results
5.1. RSME Performance of Different Number of Sensors
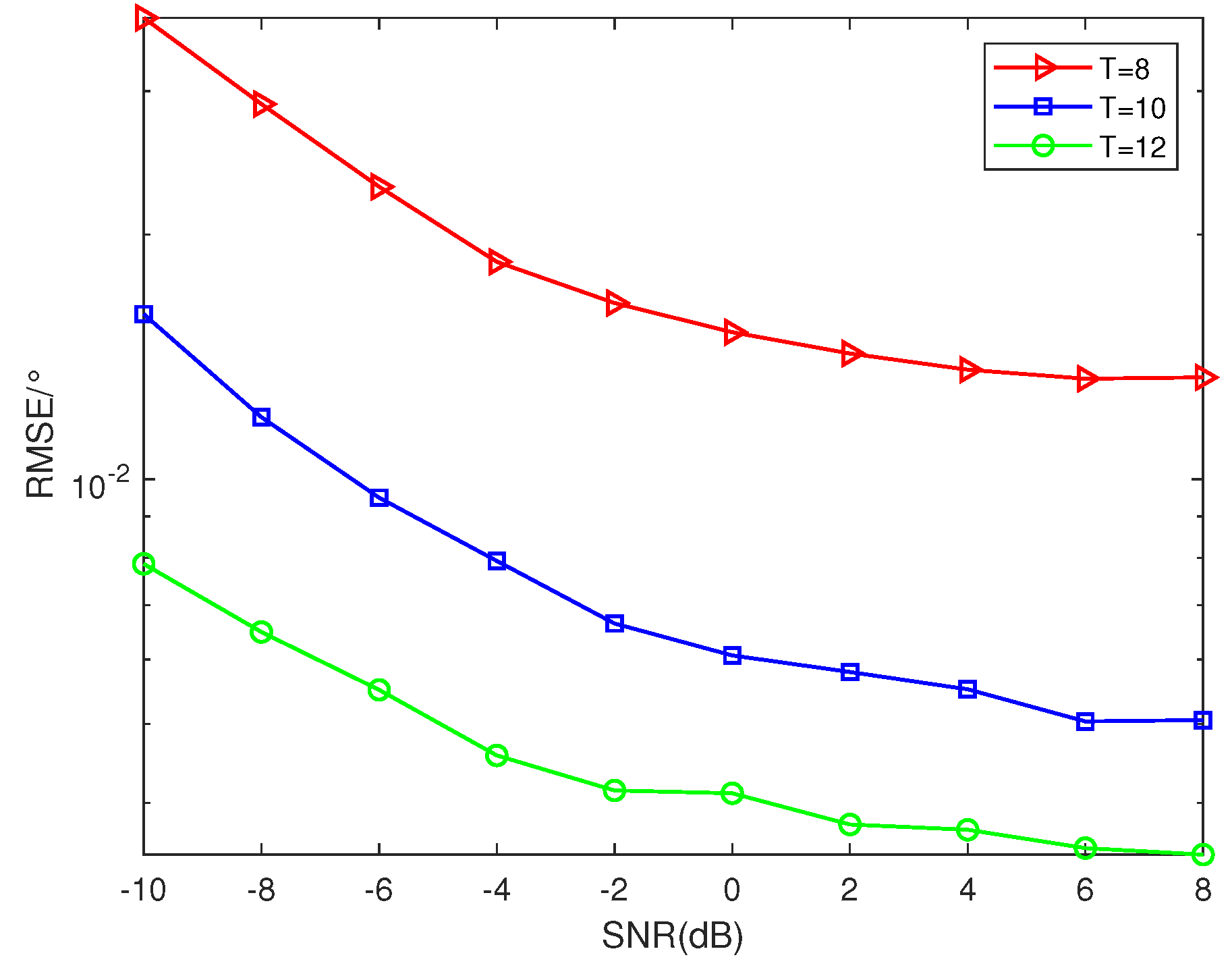
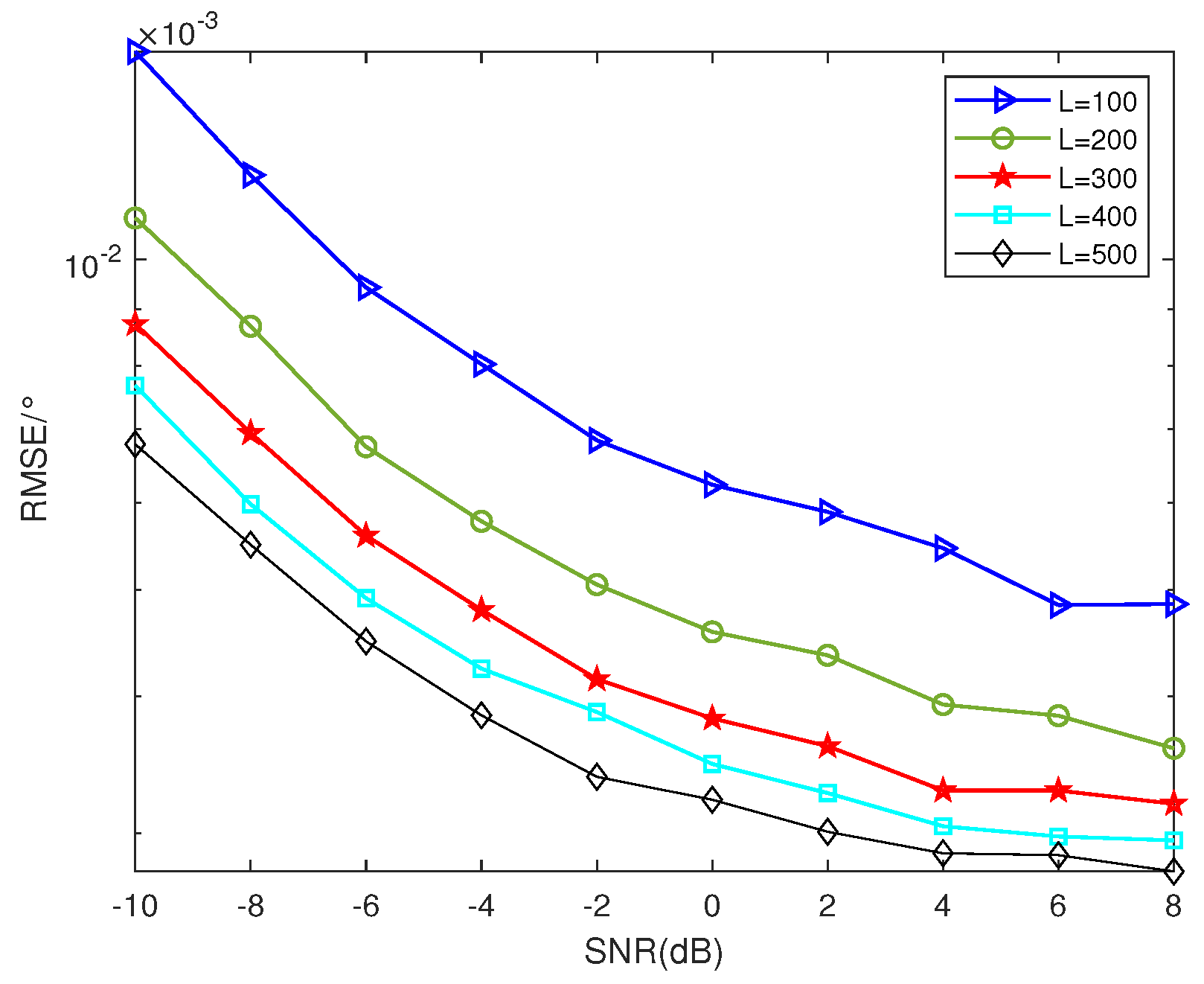
5.2. RSME Performance of Different Number of Snapshots
5.3. RSME Comparison of Different Arrays versus SNR
5.4. RSME Comparison of Different Arrays versus Snapshots
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference, Philadelphia, PA, USA, 29 April 2004; pp. 71–78. [Google Scholar]
- Li, J.; Stoica, P. MIMO Radar with Colocated Antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Bekkerman, I.; Tabrikian, J. Target Detection and Localization Using MIMO Radars and Sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Stoica, P.; Li, J.; Xie, Y. On Probing Signal Design For MIMO Radar. IEEE Trans. Signal Process. 2007, 55, 4151–4161. [Google Scholar] [CrossRef]
- Lai, X.; Zhang, X.; Zheng, W.; Ma, P. Spatially Smoothed Tensor-Based Method for Bistatic Co-Prime MIMO Radar w ith Hole-Free Sum-Difference Co-Array. IEEE Trans. Veh. Technol. 2022, 71, 3889–3899. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, J.; Wu, S. Joint Transmission and Reception Diversity Smoothing for Direction Finding of Coherent Targets in MIMO Radar. IEEE J. Sel. Top. Signal Process. 2014, 8, 115–124. [Google Scholar] [CrossRef]
- Shi, J.; Hu, G.; Zong, B.; Chen, M. DOA Estimation Using Multipath Echo Power for MIMO Radar in Low-Grazing Angle. IEEE Sensors J. 2016, 16, 6087–6094. [Google Scholar] [CrossRef]
- Oh, D.; Li, Y.C.; Khodjaev, J.; Chong, J.W.; Lee, J.H. Joint estimation of direction of departure and direction of arrival for multiple-input multiple-output radar based on improved joint ESPRIT method. IET Radar Sonar Navig. 2015, 9, 308–317. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L.; Xu, L.; Xu, D. Direction of Departure (DOD) and Direction of Arrival (DOA) Estimation in MIMO Radar with Reduced-Dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, J.; Wong, K. Joint DOD and DOA Estimation for Bistatic MIMO Radar in Unknown Correlated Noise. IEEE Trans. Veh. Technol. 2015, 64, 5113–5125. [Google Scholar] [CrossRef]
- BouDaher, E.; Ahmad, F.; Amin, M. Sparsity-Based Direction Finding of Coherent and Uncorrelated Targets Using Active Nonuniform Arrays. IEEE Signal Process. Lett. 2015, 22, 1628–1632. [Google Scholar] [CrossRef]
- Li, J.; Jiang, D.; Zhang, X. DOA Estimation Based on Combined Unitary ESPRIT for Coprime MIMO Radar. IEEE Commun. Lett. 2017, 21, 96–99. [Google Scholar] [CrossRef]
- Shi, J.; Hu, G.; Zhang, X.; Sun, F.; Zhou, H. Sparsity-Based Two-Dimensional DOA Estimation for Coprime Array: From Sum–Difference Coarray Viewpoint. IEEE Trans. Signal Process. 2017, 65, 5591–5604. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. DOA estimation of mixed coherent and uncorrelated targets exploiting coprime MIMO radar. Digit. Signal Process. 2017, 61, 26–34. [Google Scholar] [CrossRef]
- Chen, C.Y.; Vaidyanathan, P.P. Vaidyanathan, Minimum redundancy MIMO radars. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems (ISCAS), Seattle, WA, USA, 18–21 May 2008; pp. 45–48. [Google Scholar]
- Moffet, A. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef]
- Shi, J.; Wen, F.; Liu, T. Nested MIMO Radar: Coarrays, Tensor Modeling, and Angle Estimation. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 573–585. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P. Nested Arrays: A Novel Approach to Array Processing with Enhanced Degrees of Freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Gupta, I.; Ksienski, A. Effect of mutual coupling on the performance of adaptive arrays. IEEE Trans. Antennas Propag. 1983, 31, 785–791. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, W.Q.; Kong, Y.; Zhang, Y.D. MISC Array: A New Sparse Array Design Achieving Increased Degrees of Freedom and Reduced Mutual Coupling Effect. IEEE Trans. Signal Process. 2019, 67, 1728–1741. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P. Coprime sampling and the music algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Li, J.; Zhang, X. Direction of Arrival Estimation of Quasi-Stationary Signals Using Unfolded Coprime Array. IEEE Access 2017, 5, 6538–6545. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P. Multiple Level Nested Array: An Efficient Geometry for 2qth Order Cumulant Based Array Processing. IEEE Trans. Signal Process. 2012, 60, 1253–1269. [Google Scholar] [CrossRef]
- Shi, S.; Zeng, H.; Yue, H.; Ye, C.; Li, J. DOA Estimation for Non-Gaussian Signals: Three-Level Nested Array and a Successive SS-MUSIC Algorithm. Int. J. Antennas Propag. 2022, 2022, 9604664. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S. Extension of nested arrays with the fourth-order difference co-array enhancement. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2991–2995. [Google Scholar]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S.; Pal, P. Simplified and Enhanced Multiple Level Nested Arrays Exploiting High-Order Difference Co-Arrays. IEEE Trans. Signal Process. 2019, 67, 3502–3515. [Google Scholar] [CrossRef]
- Fu, Z.; Charge, P.; Wang, Y. A Virtual Nested MIMO Array Exploiting Fourth Order Difference Coarray. IEEE Signal Process. Lett. 2020, 27, 1140–1144. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S. Extension of Co-Prime Arrays Based on the Fourth-Order Difference Co-Array Concept. IEEE Signal Process. Lett. 2016, 23, 615–619. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.; Amin, M. Generalized Coprime Array Configurations for Direction-of-Arrival Estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Shi, J.; Hu, G.; Zhang, X.; Xiao, Y. Symmetric sum coarray based co-prime MIMO configuration for direction of arrival estimation. AEU-Int. J. Electron. Commun. 2018, 94, 339–347. [Google Scholar] [CrossRef]
- Liu, C.; Vaidyanathan, P. Super Nested Arrays: Linear Sparse Arrays with Reduced Mutual Coupling—Part I: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A. Direction finding in the presence of mutual coupling. IEEE Trans. Antennas Propag. 1991, 39, 273–284. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Wang, Y.; Shen, J.; Champagne, B. Padded Coprime Arrays for Improved DOA Estimation: Exploiting Hole Representation and Filling Strategies. IEEE Trans. Signal Process. 2020, 68, 4597–4611. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arrays | Total Number of Sensors | Consecutive DOFs |
|---|---|---|
| (, i = 1, 2, …, 4) | (, i = 1, 2, …, 4) | |
| ACA | ||
| NA | ||
| UCLA | ||
| FL-NA | ||
| THRL-NA | ||
| Proposed |
| Arrays | ACA | NA | UCLA |
|---|---|---|---|
| Normalized position | {0, 3, 5, 6, 9, 10, 12, 15, 20, 25} | {1, 2, 3, 4, 5, 6, 12, 18, 24, 30} | {−25, −20, −15, −10, −5, 0, 6, 12, 18, 24} |
| 2-SC |  |  |  |
| 2-DCSC |  |  |  |
| SS-MUSIC Spectrum |  |  |  |
| Consecutive DOFs | 85 | 117 | 157 |
| 0.4579 | 0.5438 | 0.3511 | |
| Normalized position | {0, 1, 2, 3, 4, 8, 12, 24, 36, 72} | {1, 2, 3, 4, 8, 12, 16, 32, 48, 64} | {0, 1, 2, 5, 8, 11, 23, 35, 71, 107} |
| 2-SC |  |  |  |
| 2-DCSC |  |  |  |
| SS-MUSIC Spectrum |  |  |  |
| Consecutive DOFs | 215 | 253 | 285 |
| 0.5151 | 0.4819 | 0.4389 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Yang, M.; Li, J.; Zhang, X. A Nested–Nested Sparse Array Specially for Monostatic Colocated MIMO Radar with Increased Degree of Freedom. Sensors 2023, 23, 9230. https://doi.org/10.3390/s23229230
Chen Y, Yang M, Li J, Zhang X. A Nested–Nested Sparse Array Specially for Monostatic Colocated MIMO Radar with Increased Degree of Freedom. Sensors. 2023; 23(22):9230. https://doi.org/10.3390/s23229230
Chicago/Turabian StyleChen, Ye, Meng Yang, Jianfeng Li, and Xiaofei Zhang. 2023. "A Nested–Nested Sparse Array Specially for Monostatic Colocated MIMO Radar with Increased Degree of Freedom" Sensors 23, no. 22: 9230. https://doi.org/10.3390/s23229230