1. Introduction
Acoustic environmental noise pollution is becoming a noticeable issue, especially in urban or industrial environments. Regulatory bodies worldwide have prescribed noise pollution mapping and mitigation directives. Apart from the regulation-driven needs, noise pollution surveying has large potential on the wider surveying and Smart City markets, for use in traffic monitoring, automated route guidance, industrial noise monitoring, and environmental research.
Already in 1999, 65% of the European Common Market population was exposed to unhealthy levels of transportation noise [
1]. Since those times, regulatory agencies across the globe have been setting noise level targets. In the EU, noise pollution is governed by the Environmental Noise Directive—END (Directive 2002/49/EC). END requires Member States to monitor noise and prepare and publish noise maps for cities, industry, and transportation connections. Strategic noise mapping is currently performed by inputting noise source models, terrain configuration, objects, and sound propagation conditions into numerical simulations that generate a prediction of average noise levels on the facades of residential buildings. However, current noise simulation methods have shown standard deviations of over 1 dB [
2], which may cause overuse or underuse of protective measures.
Similarly, in the case of industrial noise and, in the last decade, drone noise, standard measurement techniques [
3] often fail to register noise sources or give incorrect data. For more detailed analysis of industrial noise, experts utilize stationary acoustic sensors and cameras; however, some noise sources practically cannot be measured from the ground, especially when there are several sources of significant noise on one structure. In addition, such measurements give no information on noise source directionality, which is an essential parameter for applying adequate noise mitigation measures. Acoustic noise surveying from the air would enable detailed mapping of all noise sources, their sound power, frequency spectrum and directivity, and easy integration into geographic information systems (GIS). Aside from use in noise pollution, an acoustic camera mounted on an airship would be of use in rescue missions or surveillance of long, uninhabited borders for illegal border crossing. Illegal border crossing is an increasing problem, particularly felt in Europe as migratory pressures rise. According to Frontex, the total number of illegal border crossings in 2021 was near 200,000 [
4]. These numbers are on the rise again, headed towards the pre-pandemic records of more than half a million illegal crossings per year.
Finally, airborne acoustic surveillance can be used for wildlife monitoring and research. Wildlife monitoring is important for species conservation, as researchers track animal feeding, mating, and migration patterns. Wildlife acoustic monitoring is increasingly being performed with meshes of acoustic sensors attached to trees in forests, but such meshes have limited resolution, require much human effort to install, and rely on complex data collection and labor-intensive record processing [
5]. Acoustic surveillance from an airship would allow deployment to any region, even hard-to-reach geographies, dynamic monitoring even where fixed sensors are not installed, automated data collection, and rapid real-time surveillance.
Regardless of all the mentioned potential advantages, no acoustic camera to date has been designed for use on an airship and for aerial surveillance. Due to the typically large size of airships, it would be possible to construct large-aperture airborne acoustic cameras, which would yield high acoustic resolution, especially at lower frequencies, which leads to increased fidelity compared to cameras with smaller apertures that were designed for handheld applications.
An acoustic camera (AC) is an imaging device used to locate sound sources and to characterize them. It consists of a group of microphones, also called a microphone array, from which signals are simultaneously collected and processed to form a representation of the angular location of the sound sources with respect to the position of the AC. Visualization of the sound field is performed by applying a certain algorithm for spatio-temporal signal processing from the microphone array, creating an acoustic map that may be overlayed with a recording from a co-located video camera. Since the first AC appeared on the market at the beginning of the 2000s, the rapid development of this technology has started, so that today the acoustic camera is a modern engineering tool that, through the identification and determination of the position of sound sources, as well as the quantification and analysis of individual sound sources, is increasingly used for different purposes: for determining and characterizing noise sources, in the analysis of room acoustics, for testing sound insulation, for determining faults in industrial plants (detection/monitoring of sound field disturbances), when designing and testing vehicles (auto industry and aviation industry), in robotic systems, etc. [
6,
7,
8,
9,
10,
11,
12,
13]. As a consequence, a large number of ACs of different characteristics and realizations are available on the market today, depending on the application. The microphone arrays of ACs are controlled by a central processing unit (CPU). For custom-made cameras, the CPU can be implemented on a field-programmable gate array (FPGA) [
7,
14,
15,
16,
17,
18]. Several ACs that make use of FPGAs are in development, including ones with control algorithms optimized with gene sequencing methods [
19]. Much work has been devoted to optimizing control algorithms where the algorithm is implemented on a personal computer [
20]. Nevertheless, ACs designed specifically for mounting on an airship for airborne surveillance, in particular modern airships that may carry a multisensor payload, are lacking in the literature and on the market. Put succinctly, although all the necessary components for an AC mounted on an airship have recently reached maturity (FPGA-based ACs and powerful lightweight algorithms), there has been no coherent attempt to carefully select components and construct an airborne AC.
We made an AC dedicated for use on UAVs. The components of the AC attach directly to the frame of an airship, allowing for an aperture of several meters. The microphone boards and configuration are optimized for acquiring sound from terrestrial areas of up to 300 m × 300 m from an altitude of up to 300 m. The proposed solution can significantly speed up noise map making and increase map authenticity due to the inclusion of environmental acoustic noise sources. Furthermore, our aerial AC opens up the possibility of airborne acoustic surveillance for wildlife and security, including border security.
The AC consists of a microphone array and a data processing unit, implementing a beamforming algorithm to generate a visual presentation of the acoustic field (acoustic mapping) and two audio streams for detection and classification of the acoustic event. Microphone arrays are valuable tools for many applications, including specific sound-source detection, visualization, localization, and separation, also in a challenging acoustic environment, including indirect detection (via vegetation disturbance) [
11,
21].
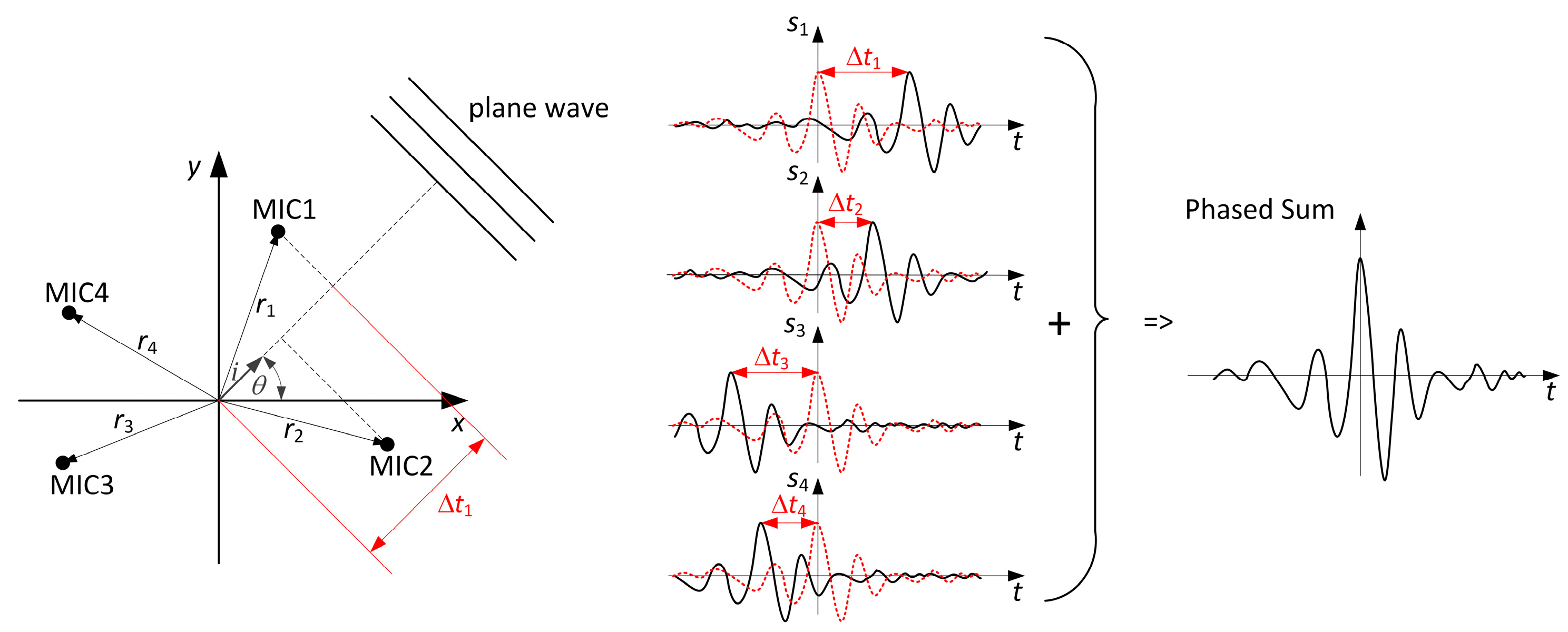
Beamforming is a general signal processing technique used to control the directionality of the reception or transmission of a signal with an array of transducers. Acoustic beamforming is a signal processing technique used to enhance an audio system’s performance by focusing sound waves in a particular direction. It involves using an array of microphones to pick up sound from a particular source or direction and then using digital processing to combine the microphones’ signals to amplify the sound coming from the desired direction and suppress the noise coming from other directions. It can be used to determine the location (angular direction relative to the AC point of origin) and intensity of the sound source. Acoustic source localization is governed by the time difference in which the sound reaches the microphone array. As a measurement technique for sound-source location, beamforming is also useful at medium to long measurement distances, which is compatible with the described use cases.
A commonly used algorithm is delay-and-sum (DAS) time domain beamforming [
22]. The basic idea is presented in
Figure 1. The sound source is assumed to be far from the microphone array (far field). Thus, the wavefront curvature approaches linearity relative to the size of the microphone array, and therefore it can be assumed that all incoming waves are plane waves.
There are many advantages of the DAS. The algorithm is based on basic concepts of wave propagation, such as linearity, straight-ray propagation, and weak back-scattering. The implementation of DAS is simple, and it can be parallelized. DAS is numerically robust, fast, and compatible with real-time applications, and because the algorithm is data-independent, it preserves temporal coherence and properties of the real envelopes [
23].
DAS beamforming is implemented for testing and benchmarking of the AC array design performance metrics. For a finite distance between the sound source and the AC, derivation of the beamformer leads to cross-spectral imaging function. For adaptive beamforming, a minimum variance distortionless beamformer (MVDR) can be implemented [
24].
2. Materials and Methods
The greatest challenge on the AC for sound-source localization from greater distances comes in the detection of low-level acoustic signals (up to 30 dB) due to sound propagation attenuation (−6 dB over each doubling of distance from the source) and absorption in air, especially at high frequencies. The AC was designed with this demand in mind.
Random noise (unwanted signal) suppression is achieved by selecting low self-noise microphones together with analogue and analogue-to-digital converter (ADC) electronic circuits, as well as with careful design of the windshield and EMI shielding implemented in the microphone and electronics case. Further improvement of the signal-to-noise ratio (SNR) is performed with a high-precision beamforming algorithm with 64 microphones. The SNR increases by 3 dB per doubling the number of microphones, yielding an SNR improvement of 18 dB for an array of 64 microphones. The audio signal is amplified and digitalized on the board next to each microphone to avoid interference. The useful signal frequency range is estimated to be approximately 200 Hz–2 kHz, whereas a sampling frequency of 8 kHz is chosen. This frequency spectrum is expected to carry most of the energy of acoustic events from the far field (on the ground). At higher frequencies, the detection precision increases until the wavelength approaches the spatial separation distance between the microphones (spatial sampling), which is dictated by the minimum distance between the microphones and the total camera dimensions. In addition, at high frequencies, the energy of acoustic events is expected to be low, as air attenuation is significant.
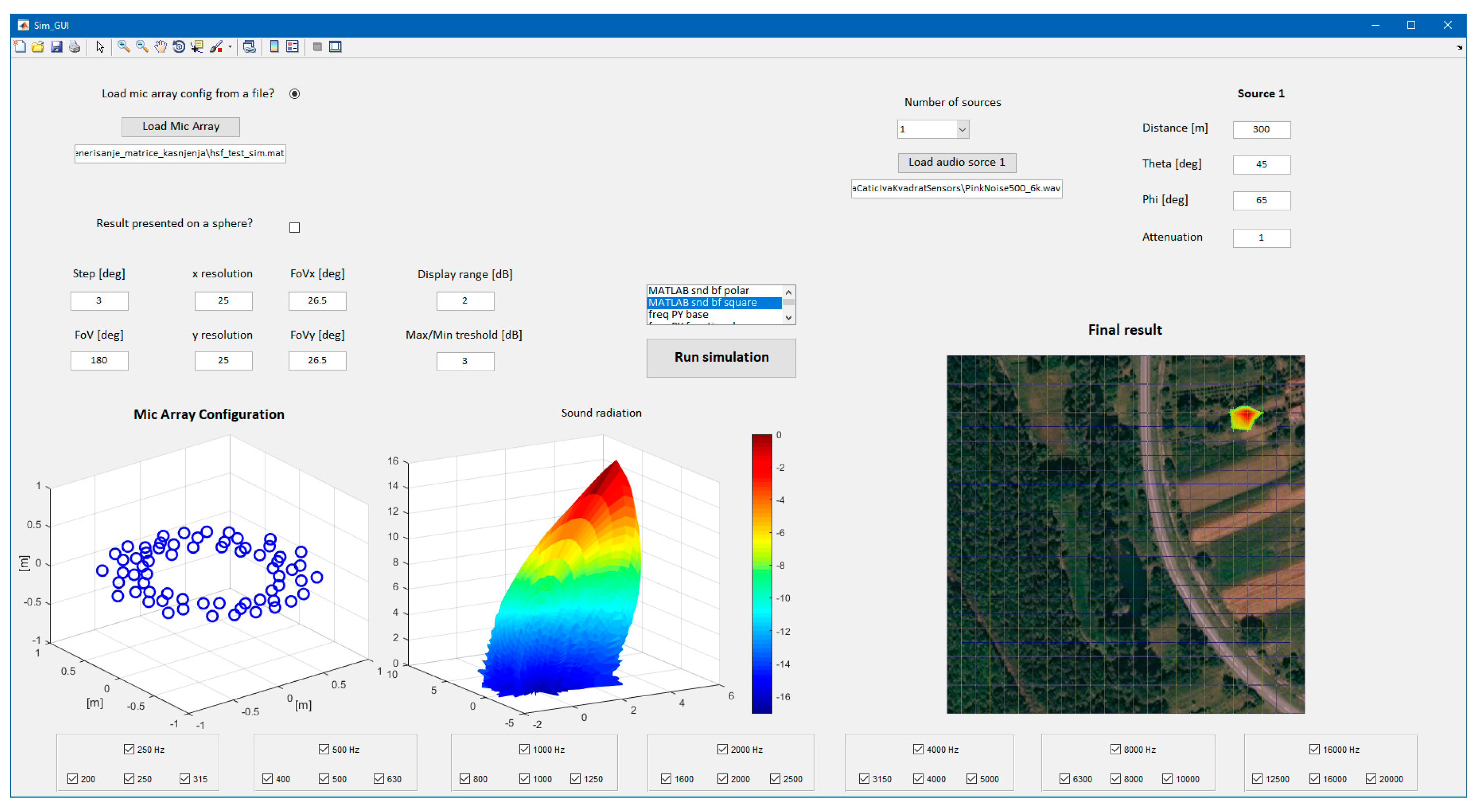
A simulation was developed in MATLAB to investigate the behavior of the AC with different microphone configurations, utilizing different beamforming algorithms for a varying number, position, and characteristic of sound sources. Microphone positions were restricted to a geometry that is compatible with mounting the microphones on the frame of the airship (Hipersfera Border UAS, Zagreb, Croatia). A drawing of the airship frame with the position of the AC indicated is depicted in
Supplementary Information Figure S1. The graphical user interface for the simulation is depicted in
Figure 2, showing a simulation result for the implemented microphone configuration.
The microphone array is ring (annulus)-like. The largest distance between any two microphones is 2 m. The smallest distance between any two microphones is 0.09 m. The random spacing of the microphones keeps spatial aliasing and side lobe attenuation at an acceptable level for the desired frequency range.
The largest off-axis angle (angle of view/listen) is set to 26.5 degrees, which keeps the off-axis resolution at most 40% greater than the on-axis resolution. Maximum Sidelobe Level (MSL) is kept below −10 dB up to the wave number Kmax26.5. This fits well with the desired frequency range (200 Hz–2 kHz).
The microphones have a cardioid directionality pattern, with the largest gain in the direction perpendicular to the plane of the array. Within a cone near the main axis (+/−30°), the pattern can be approximated as omnidirectional.
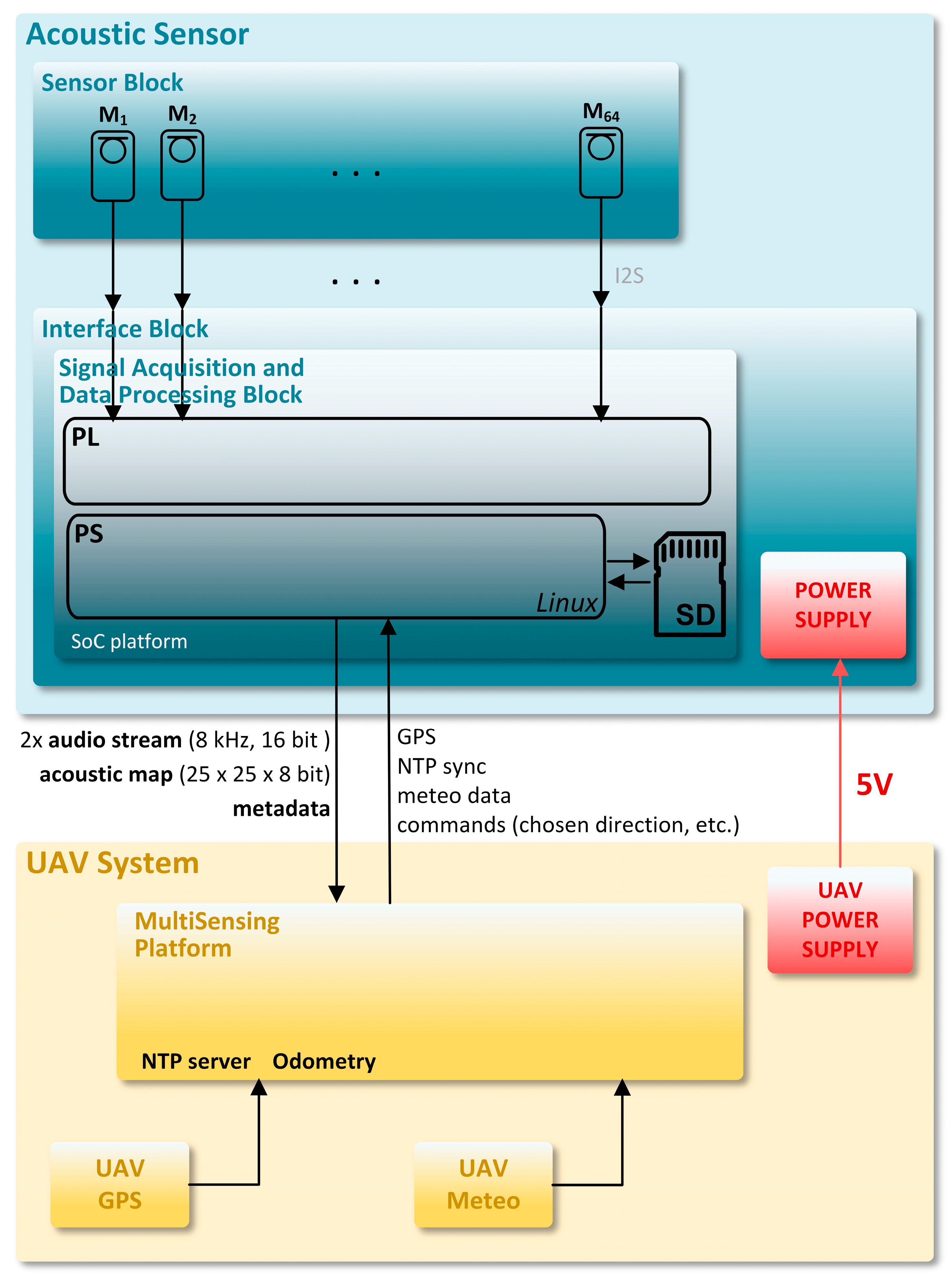
The system architecture block diagram of the AC is shown in
Figure 3. The system consists of three blocks: a sensor block, an interface block, and a signal acquisition and data processing block.
The sensor block consists of a microphone array with 64 microphone modules. The microphone modules consist of microphones M1, M2, M3, …, M64 and analogue and digital circuits next to each microphone. Each microphone module performs microphone signal amplification (low-noise microphone preamplification), analog-to-digital conversion, and communication of the I2S digital audio signal (I2S bus specification, Philips Semiconductors, 1996) to the signal acquisition and data processing block via the interface block.
The interface block interfaces the microphone block to the signal acquisition and data processing block, as well as the signal acquisition and data processing block to the UAV. The UAV provides a 5 V DC power supply.
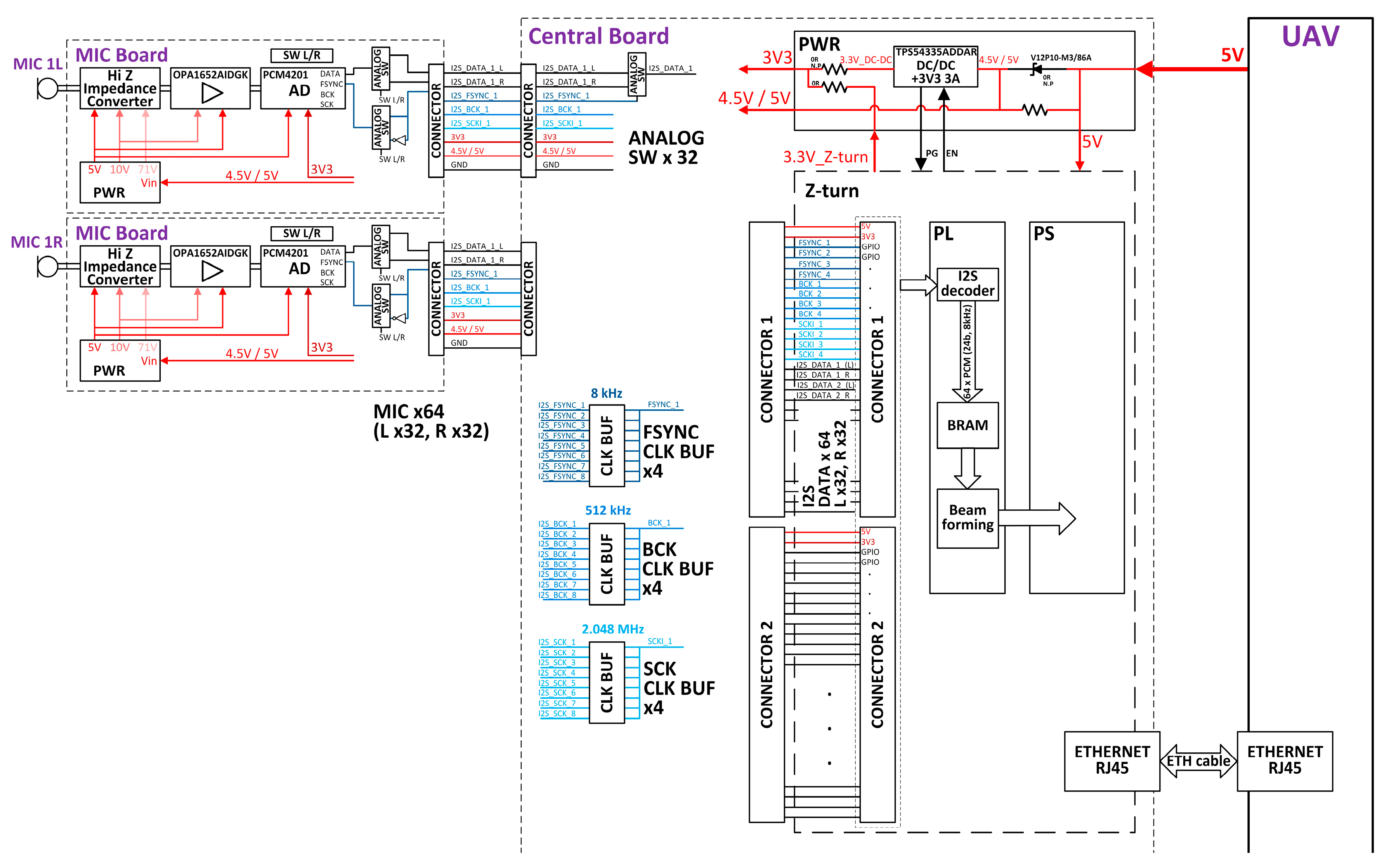
The block diagram of the hardware architecture of the AC is presented in
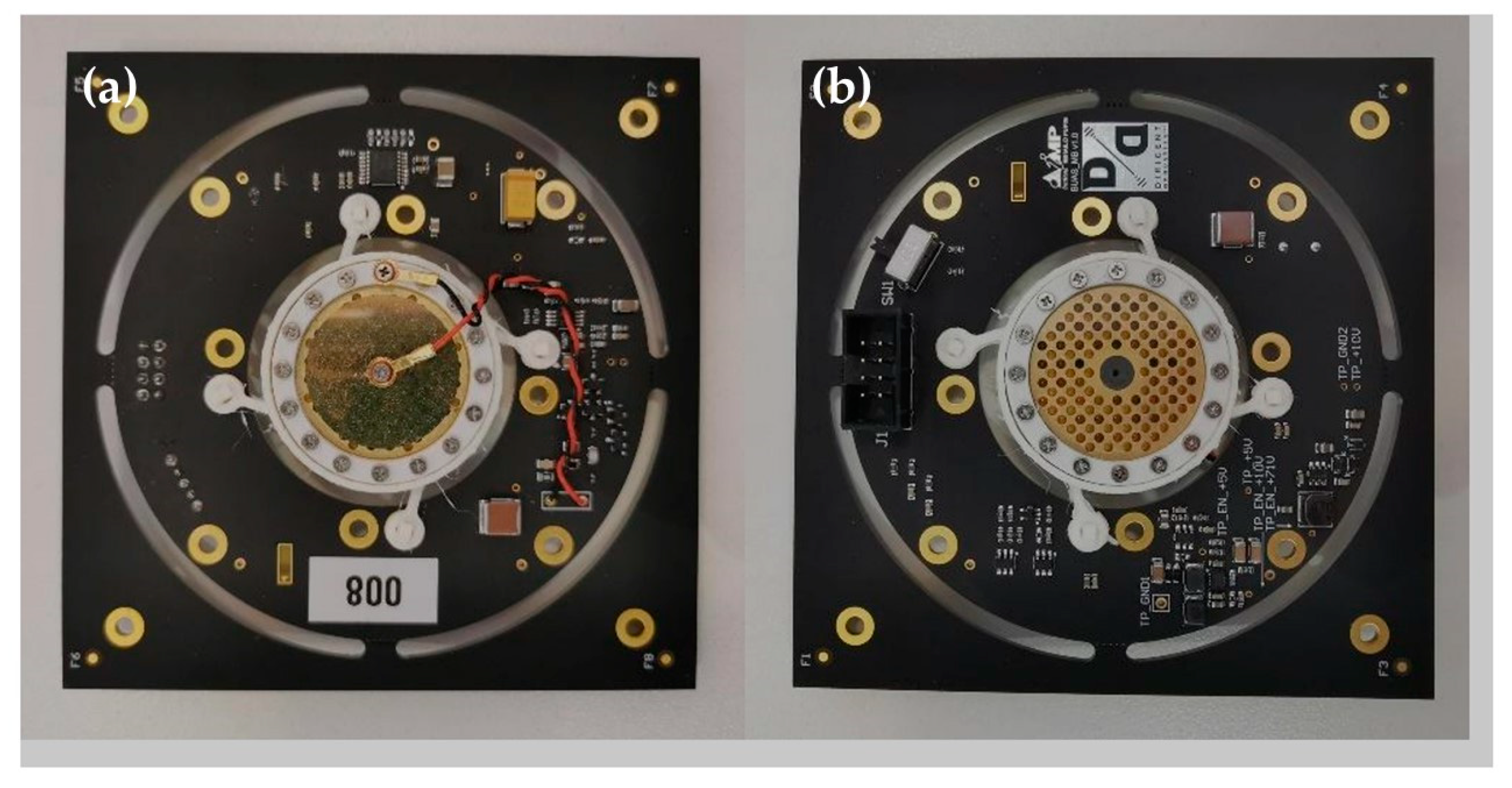
Figure 4 and includes 64 microphone boards/modules, a central board, and a Z-turn processing module (MYIR Tech Limited, Shenzhen, China).
Microphone modules were designed in-house, for optimal performance in the given use-case scenario. Required microphone specifications included low self-noise (<15 dBA), sensitivity greater than −33 dB/Pa (@48 V phantom power), a frequency range between 20 Hz and 20 kHz, and a cardioid directivity pattern. Commercially available microphone capsules were integrated onto custom-made electronics boards to create microphone modules. In order to increase the microphone sensitivity a polarization voltage of 71 V for the microphone capsule was applied.
A pair of microphone modules (“a left” and “a right”) are connected to the central board (the interface module) over a single 8-wire interface cable. The direction (left/right) of the microphone module is selected using a switch on the microphone module.
A microphone module consists of several blocks: power supply, high impedance converter, preamplifier and filters, AD converter and central board interface.
The power supply includes components for 5 V and 10 V generation—the power supplies for the components on the PCB, in addition to 3.3 V, as well as 71 V generation. The low self-noise preamplifier (<−130 dBV) with the corresponding filters provides a gain of 200.
The TI PCM4201 AD converter (Texas Instruments, Dallas, TX, USA) was chosen for this application for its low noise, low distortion, and low power, with supported sampling rates from 8 kHz to 108 kHz. The output of the AD converter is 24-bit linear left-justified PCM data, which can be considered as I2S.
Three clocks are generated on the signal acquisition and data processing block for the AD converter, as it operates in slave mode: a frame synchronization (FSYNC) clock for 8 kHz sampling, a bit (BCK) clock for 512 kHz sampling, and a system (SCK) clock for 2048 kHz sampling. These signals are transmitted over long 8-wire interface cables, where the maximal cable length is 2.4 m. For these frequencies and cable lengths, the signal integrity was checked in a simulation.
The switching between the left and right channel is performed at the FSYNC clock frequency. Power supplies for the microphone module (5 V and 3.3 V) are provided via the 8-wire interface cables as well.
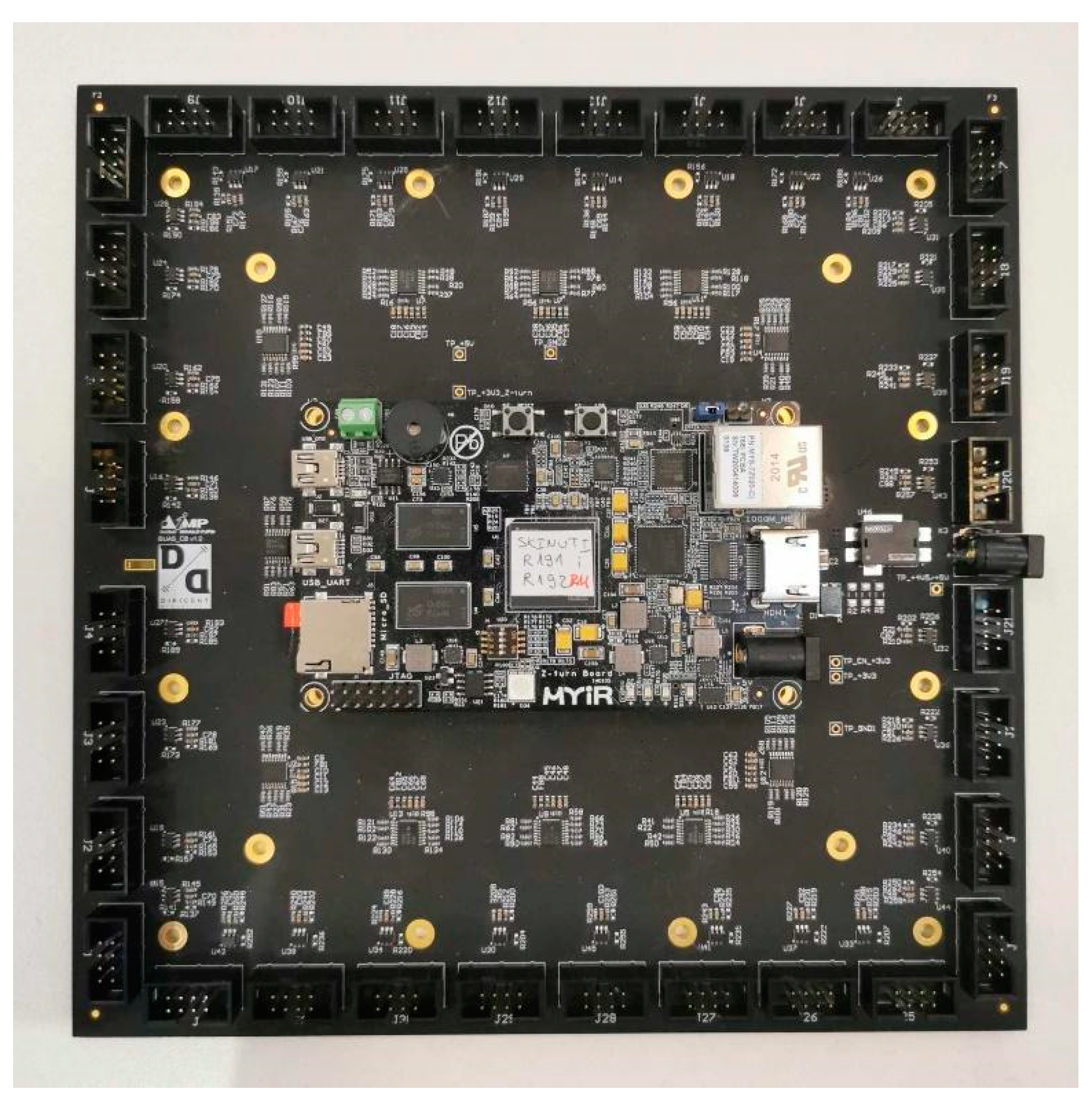
The central board contains 32 headers for the microphone module interface, 3 × 4 clock buffers, 2 connectors for the Z-turn interface, and a power supply with the corresponding filters. The central processing unit of the system, used for signal acquisition and data processing, is the Z-turn board. The Z-turn board is a high-performance Single Board Computer (SBC) built around the Zynq-7020, as a member of the Xilinx All Programmable System-on-Chip (SoC) platform Zynq 7000 family, featuring integrated Programmable Logic (PL)—Xilinx 7-series Field-Programmable Gate Array (FPGA) logic and a Processing System (PS) consisting of dual-core ARM cortex A9 processors (Xilinx XC7Z010/020, San Jose, CL, USA).
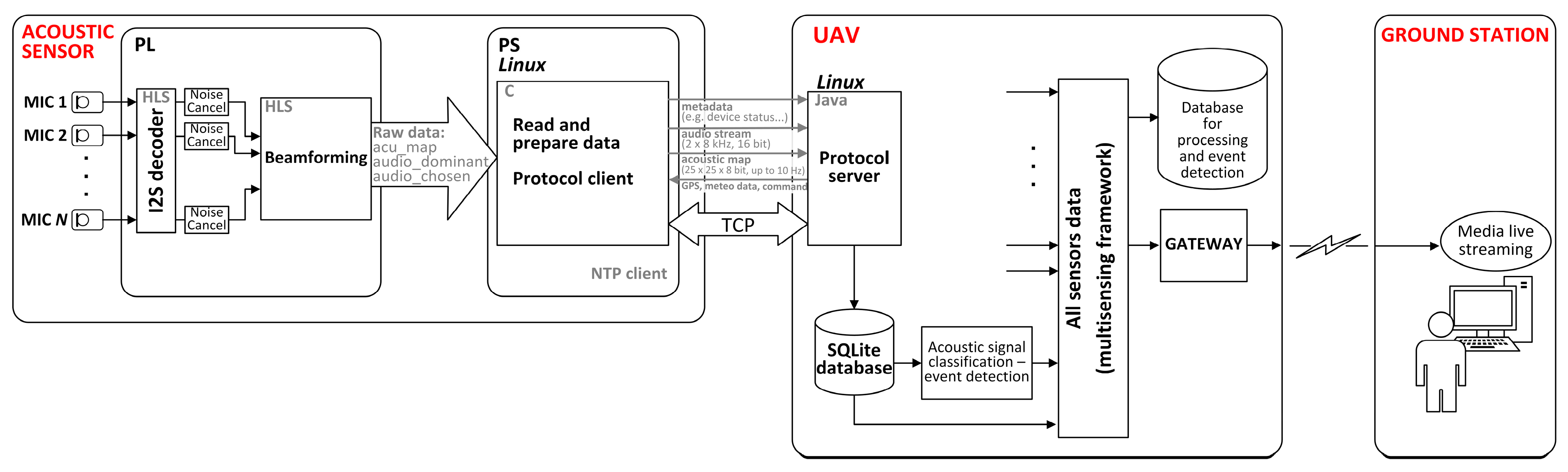
The software architecture block diagram of the AC is depicted in
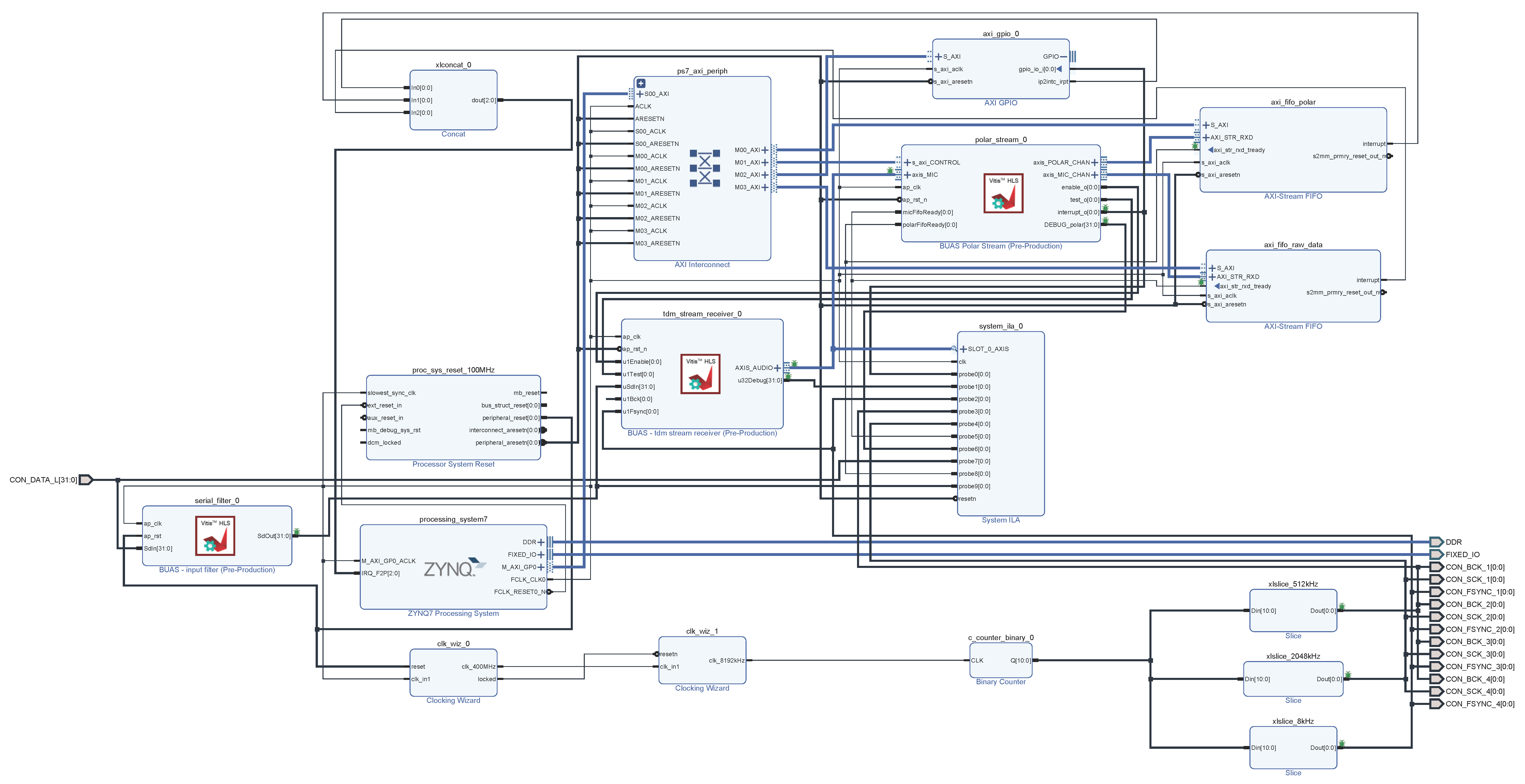
Figure 5. The data acquisition and beamforming algorithm are implemented on PL, using the Vivado Design Suite 2020.2 environment (Xilinx, San Jose, CL, USA). Data acquisition is implemented in the tdm_stream_receiver Intellectual Property (IP) High-Level Synthesis (HLS) block, while the conventional delay and sum beamforming algorithm is implemented in the polar_stream IP HLS block, as presented in
Figure 6.
The system operating frequency is 100 MHz. Data acquisition in the tdm stream receiver IP HLS block implies sampling of microphone signals, with a sampling frequency of 8 kHz (i.e., every 125 ms), and conversion into a serial data sequence. This block introduces a processing delay of 3 cycles of the operating frequency, i.e., 30 ns. The serial data sequence is forwarded to the polar _stream IP HLS block.
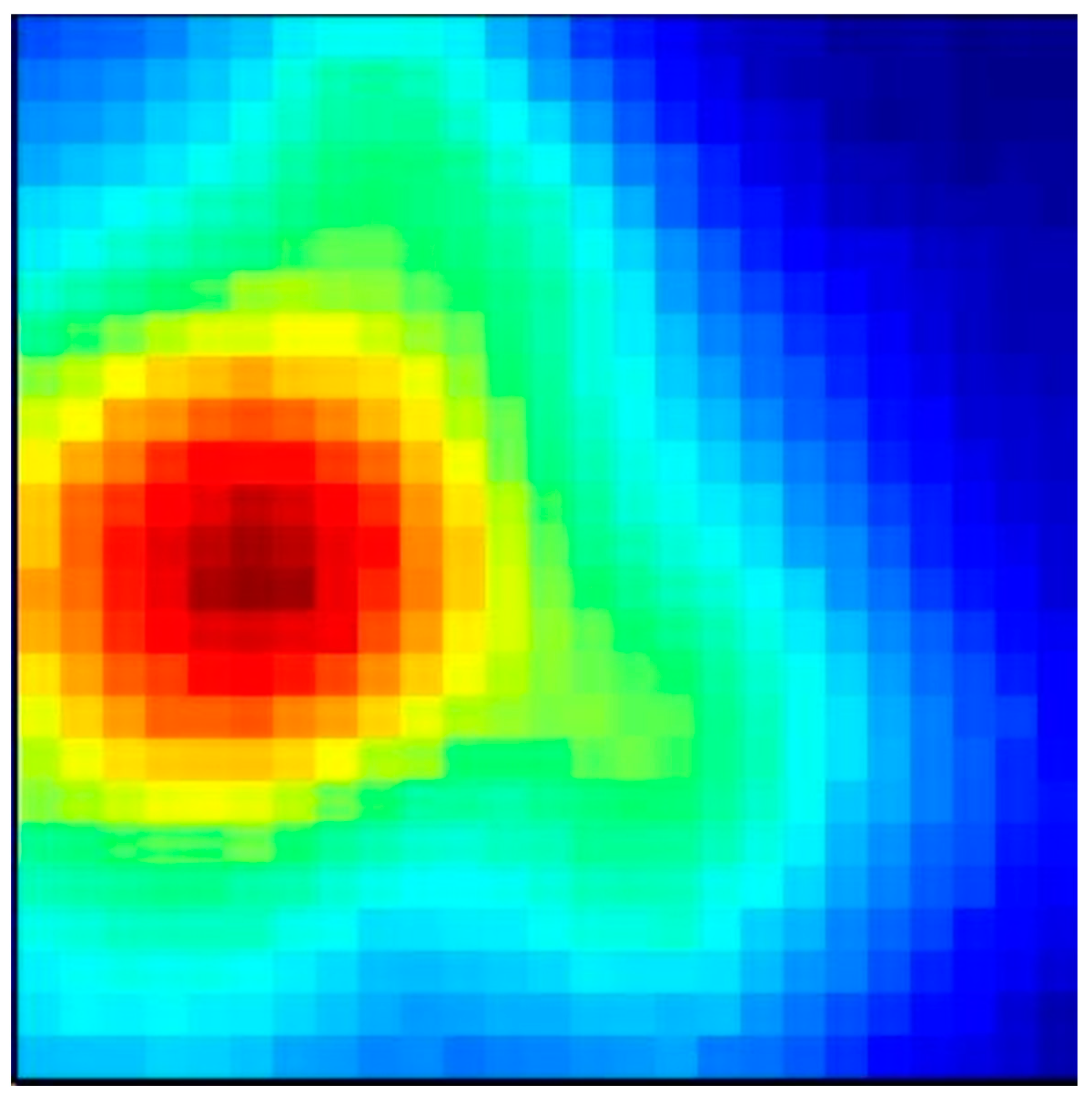
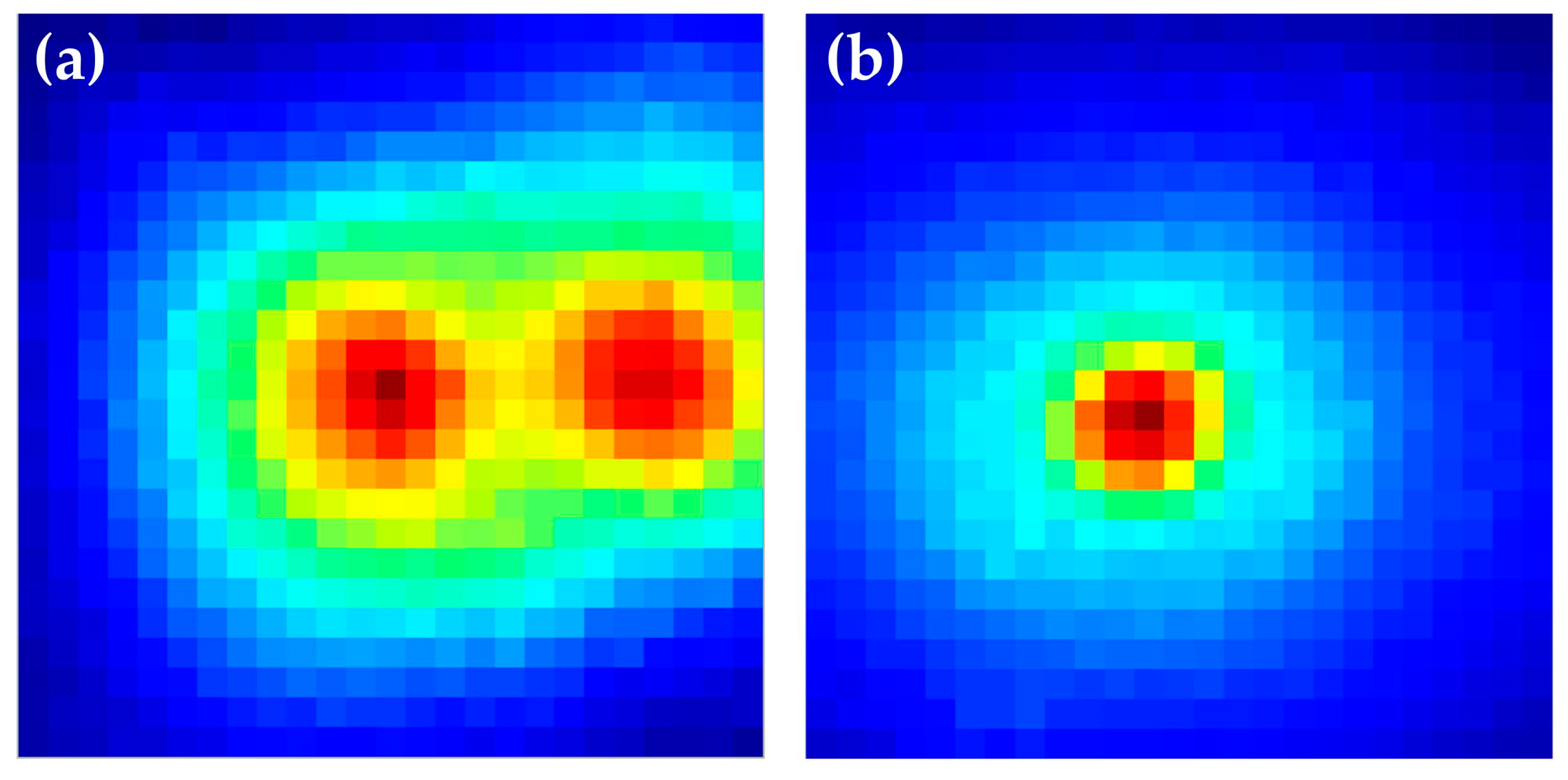
The outputs of the polar_stream IP HLS block are the following: a block of 625 32-bit integers containing values of each of the 25 × 25 fields of the acoustic map for each second (a memory block), and 24-bit audio samples from the dominant and a chosen direction, each 125 µs long (AXI-Stream FIFO). In addition, for verification purposes, a chosen microphone signal sample is sent to the PS every 10 ms (80 samples as a single packet in AXI-Stream FIFO).
The implementation of the conventional delay and sum beamforming algorithm in the polar_stream IP HLS block is optimized in terms of basic FPGA resources and processing time. A single pass through this block introduces a processing delay of 5 cycles of the operating frequency, i.e., 50 ns. The main steps within this IP HLS block are the following:
Reading of serial audio data (from the tdm_stream_receiver IP HLS block) and packing these data into 64 shift registers: performed every 125 µs (the sampling frequency); the execution time is 50 ns × 64 = 3.2 µs.
Calculation of the averaged polar matrix (25 × 25 fields of the acoustic map for each second) and sending the synchronization signal to PS: performed every 1 s; the execution time is 50 ns × (625 + 2) = 31.35 µs.
Sending of 2 signals (the chosen and the dominant) to PS: performed every 125 µs; the execution time is 50 ns × 2 = 100 ns.
Implementation of the conventional delay and sum beamforming algorithm: performed every 125 µs; the execution time is 50 ns × 625 = 31.25 µs.
The total required processing time, including all previously described steps, is 65.93 µs.
PS is based on the Linux Ubuntu 20.04 OS. A single Linux application performs data exchange with PL via two AXI-Stream FIFOs and a mapped shared memory, collecting raw data from PL in real time. The application generates three files each second: an acoustic map, which is a .bmp image file (25 × 25 pixels, 8-bit depth), and two .wav audio files (8 kHz, 16-bit depth), one for the dominant direction signal and another for a chosen sound-source signal. The application sends these files to the UAV via a communication protocol based on the User Datagram Protocol (UDP). The application also receives from the UAV meteorological data, GPS data, and commands. An NTP daemon service runs on the OS, whereas ntp.conf needs to be set according to the final UAV central system configuration (including NTP server settings).
The acoustic map is calculated using a beamforming algorithm-based delay matrix that depends on the microphone array configuration and meteorological data, especially wind speed, which affects sound speed, as well as the desired FoV (field of view). The delay matrix is calculated on the PS based on determined microphone positions and current meteorological status, and is sent to the PL.
The AC has a chosen FoV spanning ±26.5 degrees relative to the microphone array’s central axis. Thus, for an altitude of 300 m, the acoustic map will cover an area of 300 m × 300 m on the ground.
The AC should be connected to the UAV central unit via a single Ethernet connection, using the UDP protocol. The proprietary protocol is implemented for data exchange between the AC and the UAV. The acoustic map and two audio files are transferred to the UAV processing unit every second and stored with a filename containing the timestamp. The precise time on the central processing unit of the AC should be set using the NTP protocol, whereas the NTP server is implemented on the UAV processing unit. The UAV sends to the AC GPS coordinates, meteorological data, and control commands.
To summarize, both parallel data acquisition and beamforming are performed in PL, and signal processing results are transferred to the PS. The PS collects raw data from PL, generates .bmp and .wav files, and sends them to the UAV. The signal acquisition and data processing block are connected to the UAV via a single Ethernet connection. The protocol for the communication between the AC and the UAV is implemented on the PS using UDP. The communication is bidirectional, since the AC sends two audio streams, an acoustic map, and metadata, and receives GPS data with the precise time, meteorological data, and commands.
The operator (on the ground) can listen to the recorded audio signals. In addition to the sound coming from the dominant direction, the operator can choose another direction that they would like to monitor.
The AC system can be connected to a PC/laptop via a UART-to-USB connection for testing purposes.
The AC (microphone modules and central board) should ideally be mounted directly onto the frame of the UAV. In the case of a modern airship, which typically has a carbon tube internal construction [
25], the AC is best mounted directly onto the tubes, because in such a case the AC would conform to the shape of the airship and there is no need for extra mounting that would increase the load. An optimized position for the AC components on a commercially available airship UAV, as confirmed with simulation, is shown in
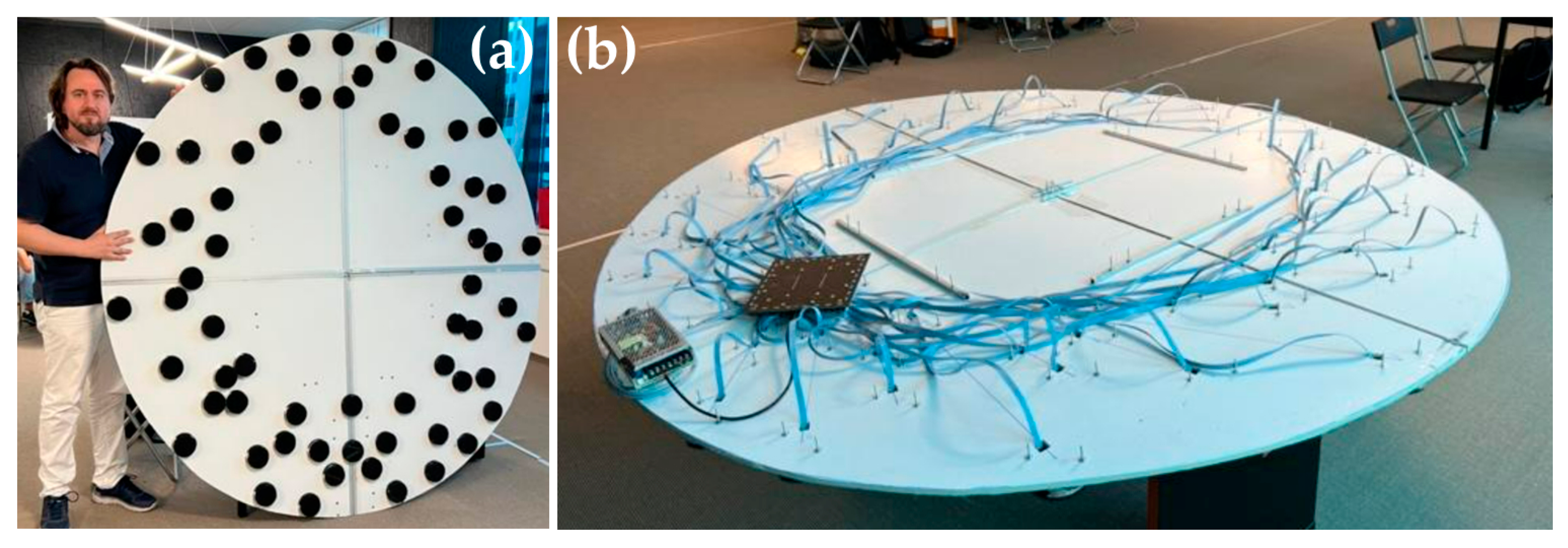
Supplementary Information Figure S1. For ground-testing purposes, we mounted the AC components on a circular piece of cardboard with a diameter of 2 m as a mock-up of actual operation on an airship.
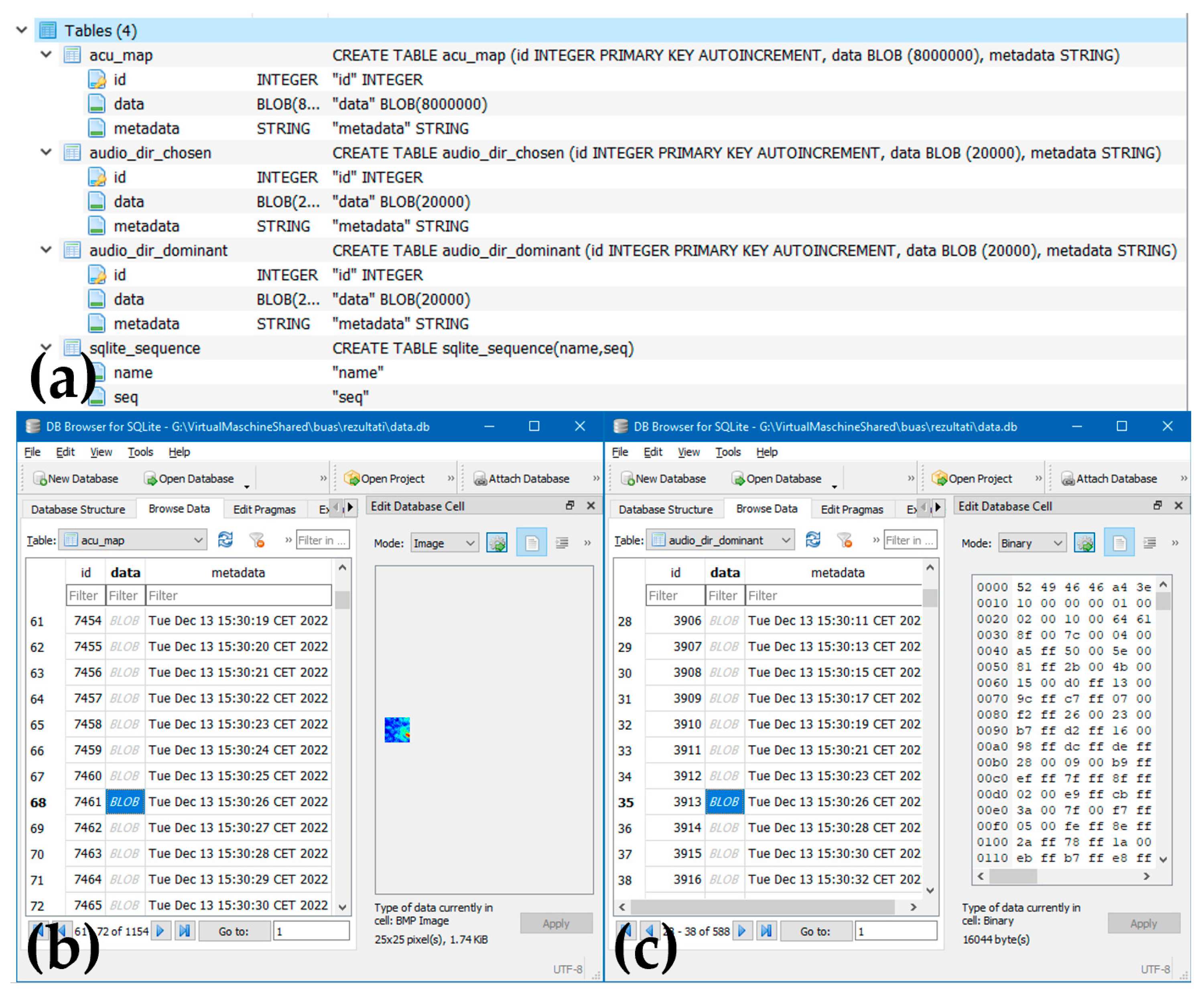
The AC communicates with the UAV via our custom developed UDP Client-Server protocol. A test application for the server side (UAV) was written in JAVA and it can be run in Linux OS on a PC. The same application can be adapted for the final application on the UAV. The test application stores the received data (the acoustic maps and audio files) in an SQLite database, as well as files on the file system in the selected folders.
There are three tables in the SQLite database: acu_map, audio_dir_dominant, and audio_dir_chosen. Each second, a set of data (a .bmp and two .wav files) is stored as a BLOB field in the corresponding table of the database. The communication protocol defines the possible commands and responses (statuses), as well as the corresponding data (depending on the context) which are exchanged between the AC and the UAV. Each side receives command packets (CMD_*) and sends an appropriate response (RESP_*) for every received packet in the time interval specified for that command.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











