2.1. PMSM Mathematical Model and EKF
The principle of sensorless motor control varies for different motor models. In general, a mathematical model in a rotating coordinate system is used to obtain first the motor speed and then the motor’s rotor position through integration [
20]. The method proposed in this paper has strict requirements for the rotor position, so a mathematical model in a static coordinate system is used to obtain the rotor position. The motor speed is derived by differentiating the rotor position.
For mathematical modeling of PMSM, the extended back electromotive force model proposed in the literature [
21] is utilized, and its current formula in the static coordinate system is as follows:
where
,
,
, and
are the stator current and stator voltage in the static coordinate system.
represents the stator phase resistance;
and
are the motor d-axis and q-axis inductances, respectively.
represents the electrical angular position of the rotor,
denotes the rotor electrical angular velocity,
represents the permanent magnet flux linkage, and
represents the amplitude of the extended back EMF, which is expressed as follows:
The estimated rotor position is:
Let
be
,
be
. Select state variable, input variable, and output variable as
,
, and
. Add system noise and measurement noise, and discretize them:
where
is the output matrix and
represents the nonlinear function after discretization, which is expressed as:
The research object of this paper is to design a control mode of surface permanent magnet synchronous motor (SPMSM). For SPMSM,
.
and
are transient high-frequency components, which can be ignored when calculating the extended back EMF.
and
represent the system noise and measurement noise, respectively. In practice, these two noises are random and independent of each other, and conform to a normal distribution with an expectation value of zero. Their covariance matrices
and
are described as follows:
EKF, which is an extended application of the Kalman filter algorithm in a nonlinear system, is a type of optimal recursion method. It expands the current working point of the nonlinear function through Taylor series expansion and ignores the higher-order terms; then the system is approximated to a linear system after linearization. Aiming for minimum error covariance, EKF could obtain the optimal estimation result through prediction step and update step in a noisy system. The steps of EKF for the permanent magnet synchronous motor system are as follows [
22]:
(1) State prediction. Predict the next moment’s state vector based on the current input and the previous state estimate.
where
represents the sampling period, and
and
represent the current state and the estimated value of the state at the next moment, respectively.
(2) Calculate the output
at the next moment:
(3) Calculate the error covariance matrix:
where
represents the Jacobian matrix.
(4) Calculate the gain matrix:
(6) Update the error covariance matrix:
where
represents the covariance matrix used in the next state estimation.
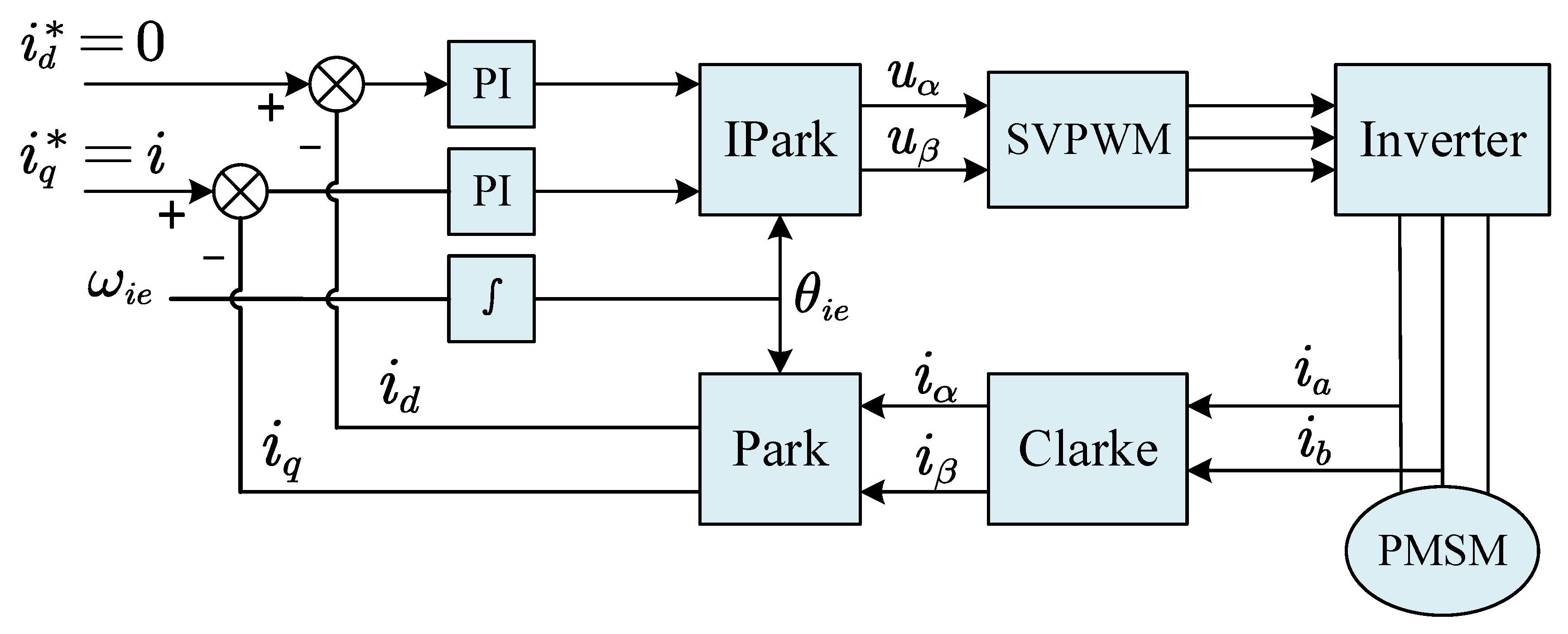
2.2. Current Closed-Loop Speed Open-Loop I/F Startup Analysis
This paper uses the I/F startup strategy to transition the motor from zero to medium-high speed. I/F startup requires a proper q-axis current amplitude and current rotation frequency. Typically, the precise value is determined offline based on the load, and the d-axis current is set to zero.
Figure 1 depicts the block diagram of the PMSM speed open-loop I/F startup system [
17].
The mechanical formula of SPMSM can be expressed as:
where
denotes the mechanical angular velocity of the motor,
represents the number of pole pairs of the motor, and
i is the magnitude of the current vector.
represents the angle between the current vector and the permanent magnet excitation flux linkage, which is called the power angle later.
represents the moment of inertia,
denotes the damping coefficient, and
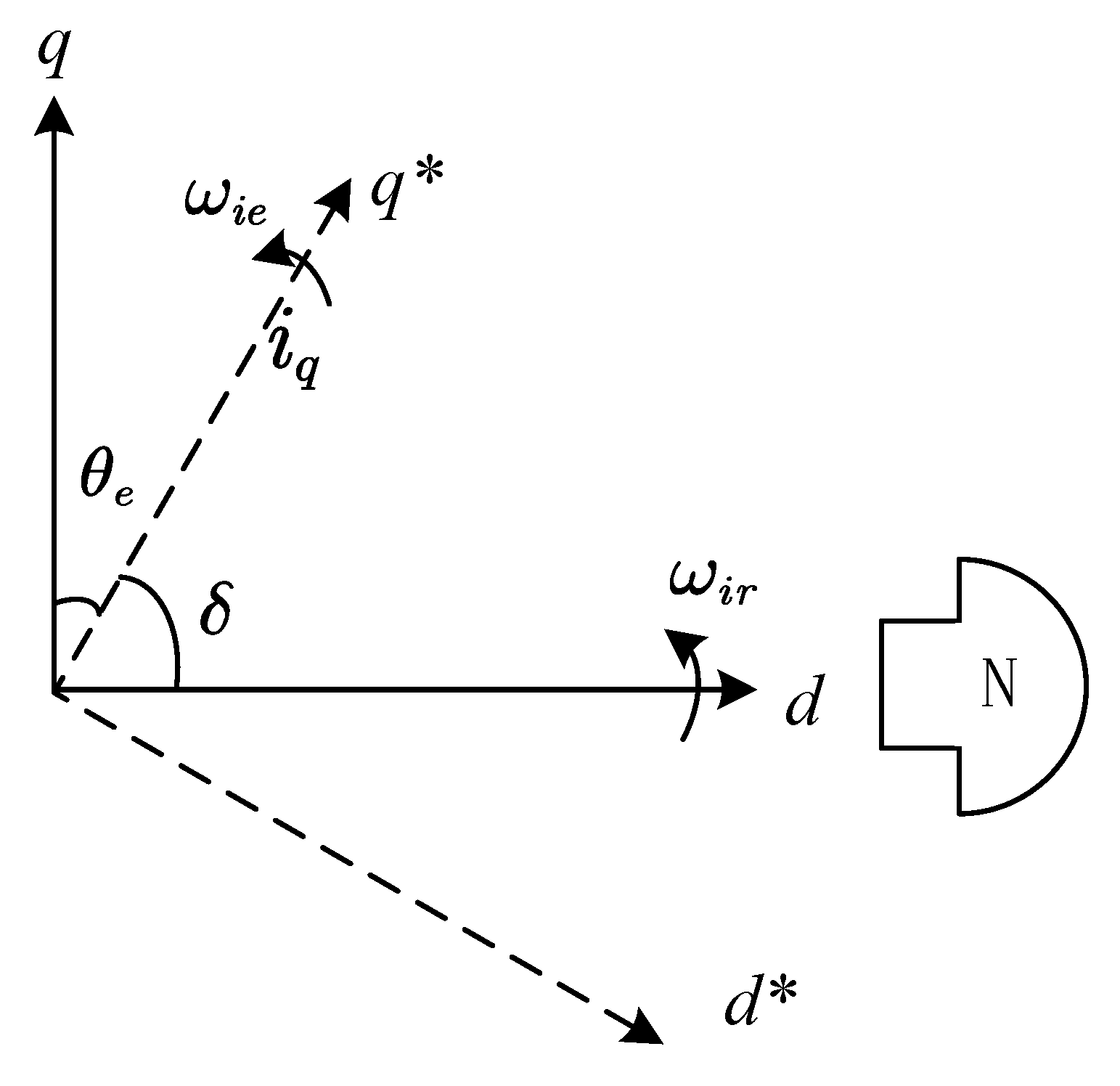
is the load torque. For a clearer representation of the relationship between a given current vector and rotor position, the virtual rotating coordinate systems
d* and
q* are used to represent the
d and
q axes of the given current vector. The electric angle of axis
d in the virtual coordinate system where the current vector located is
, the rotational electric angular velocity is
, and the rotating electric angular velocity of the coordinate system where the rotor is located is
, as shown in
Figure 2.
Denote the electrical angle velocity of the given current vector as
and the given mechanical angular velocity as
. Then, the difference between the given mechanical angular velocity and the mechanical angular velocity of the rotor is denoted by
. This leads to the following formula:
Substitute Formula (13) into (12) to obtain the differential formula:
When the above formula reaches a steady-state,
changes very slowly. Thus, it can be considered a constant value. As
converges to zero, the steady-state condition is:
Therefore, the conditions that are satisfied when the PMSM open-loop I/F startup mode is stable in operation are:
Define the angle between the given current vector angle and the rotor q-axis as the error angle
:
in the control mode with
id = 0 and
iq =
i. According to Formula (12), the power angle relationship under stable conditions is obtained as:
Solve the stable point of the power angle:
According to Formula (17), the error angle of the stable point is:
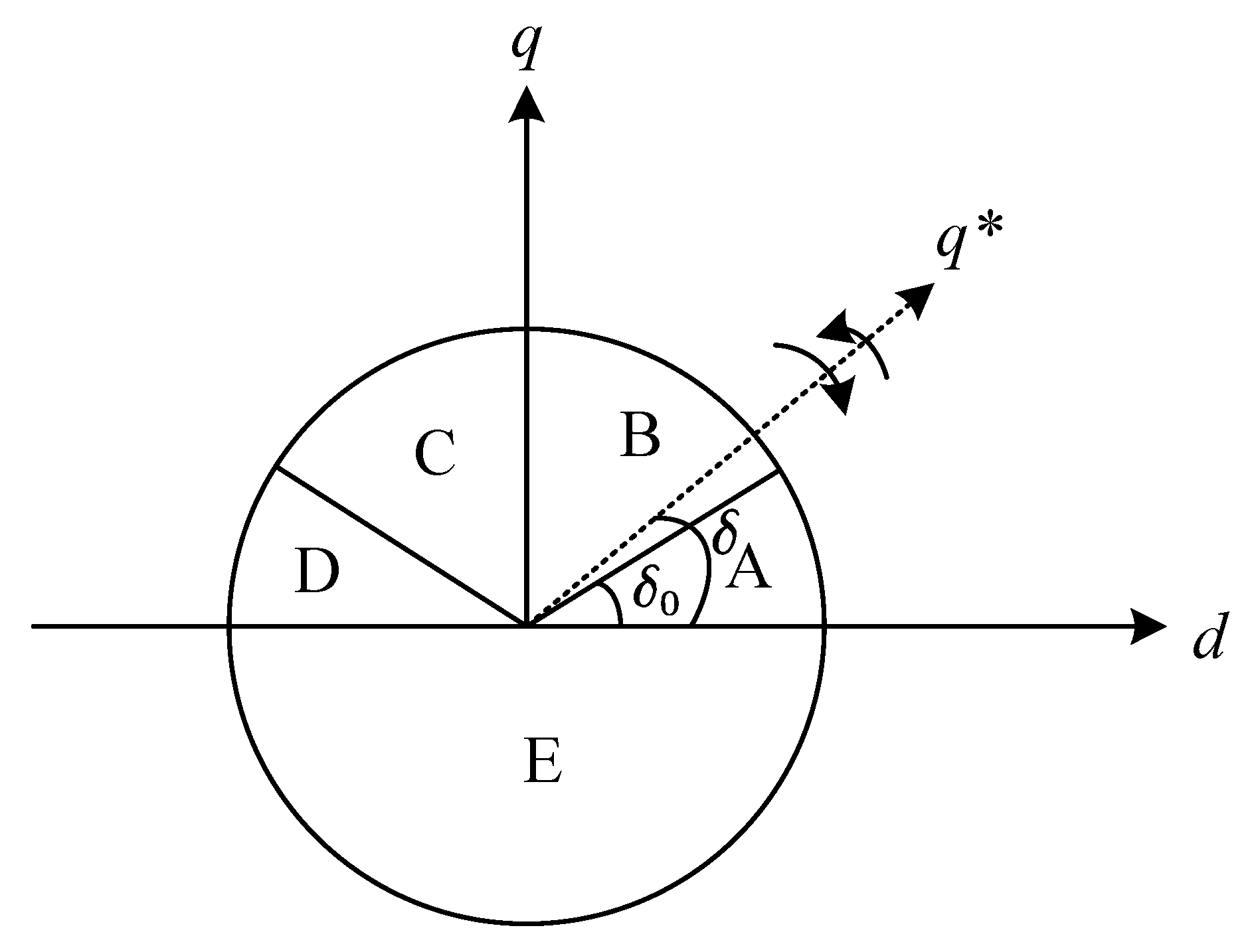
According to the above derivation and analysis, during the process of speed open-loop I/F startup, by selecting the appropriate given current vector value and current rotation frequency, the rotor of the motor can rotate with the given current frequency and maintain dynamic balance after the speed is stable, and the power angle
converges to
. As shown in
Figure 3, counterclockwise rotation is taken as the positive direction. Considering that the load and friction force are always positive, when the power angle reaches
, the resultant force with the motor torque is zero. Therefore,
is the power angle balance point. When the power angle
moves to the B region or the C region, the motor accelerates and moves into the A region. In region D, the motor decelerates to move, and when it enters region E, a torque opposite to the direction of motor rotation is generated.
During the operation of the motor, the torque generated by the motor must be initially positive, that is,
is positive, to ensure that the motor can overcome the load torque and drive the motor to rotate. When the motor speed is stable, the torque generated by the motor and the load torque are balanced. In
Figure 3, the torque balance point is at the intersection of the AB and CD regions. When
is in the C region and increases, the torque will decrease, which will cause
to increase further and eventually become out-of-step. Thus, if the given positive direction is counterclockwise, only when
is
to
is the operating range of the motor I/F startup stable, that is, the AB area in the figure.
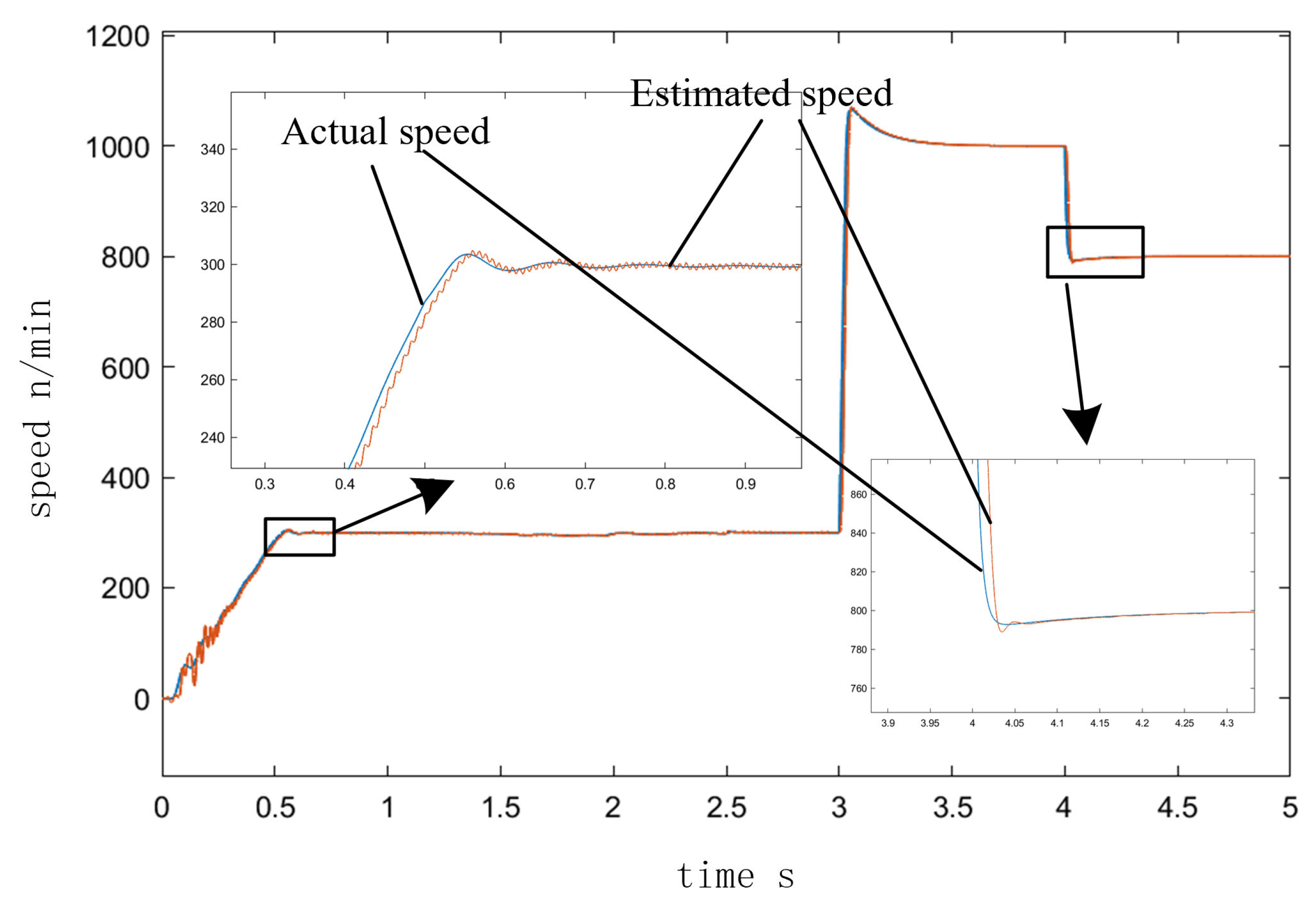
On the other hand, the actual speed of the motor constantly fluctuates around the specified value, and there are acceleration and deceleration processes during the startup process. Therefore, the overall process of the motor is a process of variable acceleration movement. also moves back and forth around the power angle balance point and gradually converges. The convergence rate is dependent on the damping coefficient. When the load damping is low, the motor speed converges slowly to its steady-state value. The final steady-state equilibrium point has a non-linear positive correlation with the current iq in the stable operation range under the condition that the rotational speed torque and the motor constant remain unchanged.
Since the I/F startup is an open-loop control mode, the initial position of the motor rotor is unknown, and the starting speed cannot precisely match the specified value. With the I/F startup, the initial position of the motor must be known. Suppose the initial given position is too different from the actual motor position. In that case, an opposite torque will be generated, causing the I/F startup to not be a strict uniform acceleration start, which will impact the motor rotor speed’s follow-up effect. Currently, the prepositioning method is often used, in which a constant current vector is provided, and the generated torque drags the motor rotor to the predetermined position. However, there is a situation where the difference between the given current vector and the rotor position is at a angle. The lower motor torque is zero, resulting in positioning failure. In practice, a slow rotating current vector is frequently provided to guarantee the efficacy of the prepositioning method.
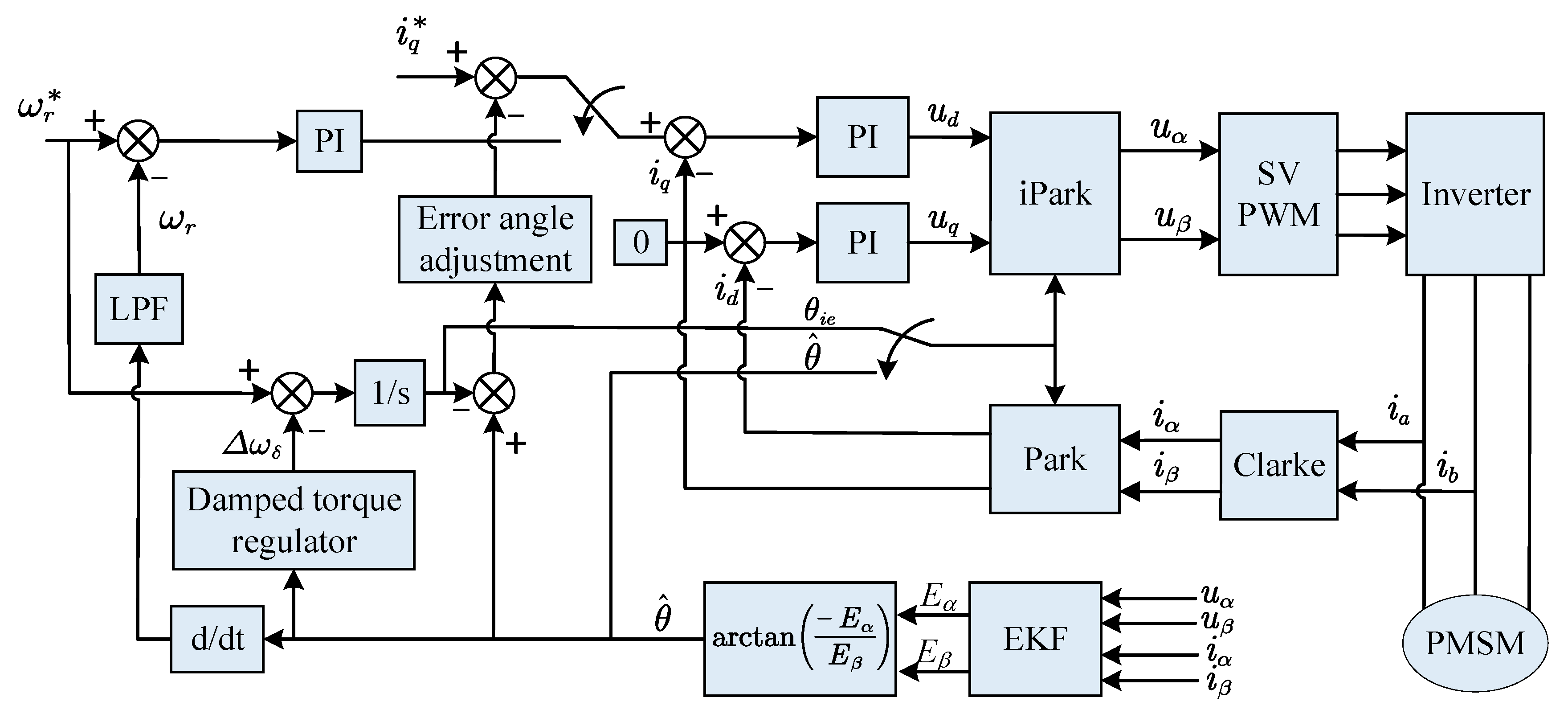
2.3. Smooth Switching between IF Control and EKF
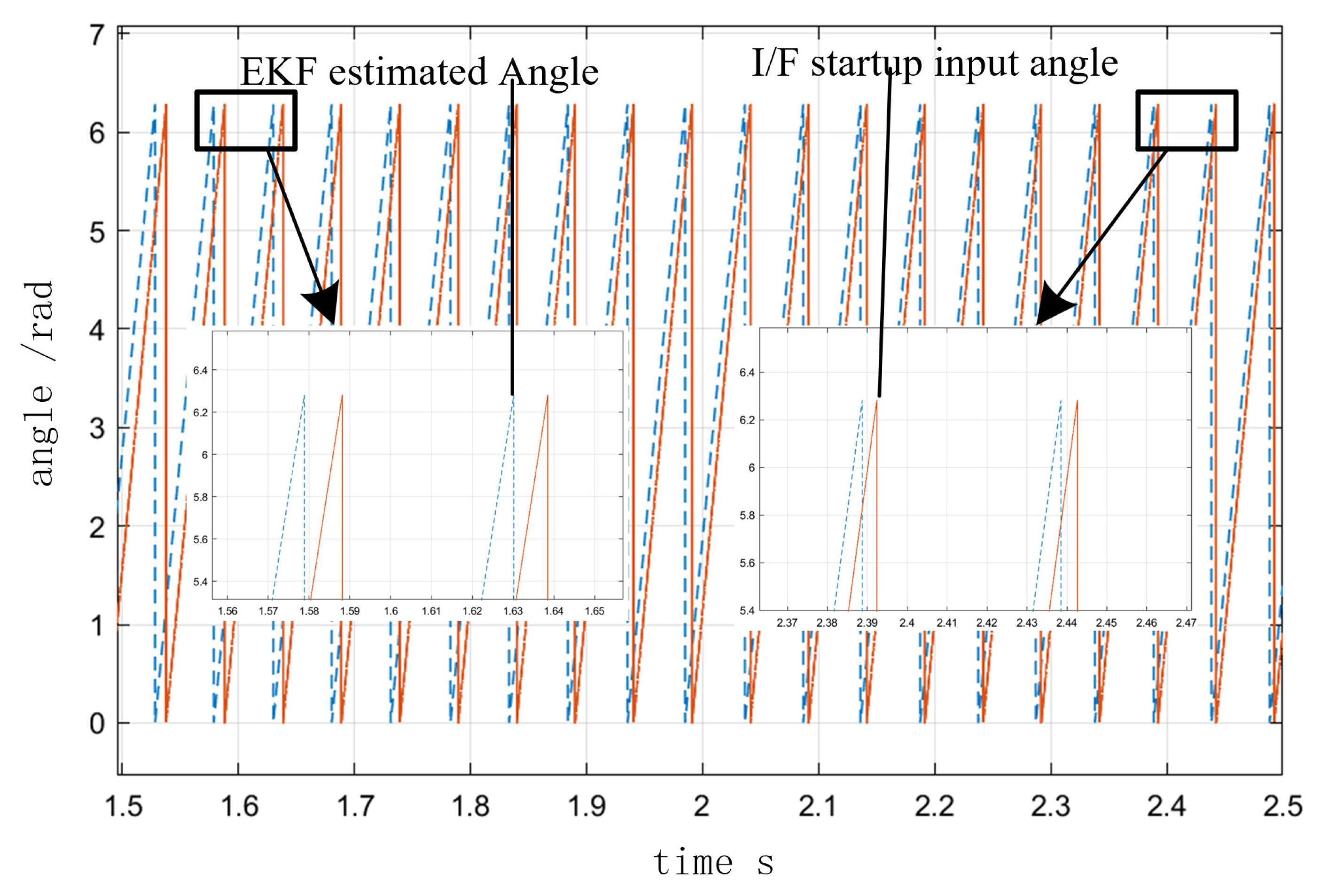
After the I/F startup, when the motor speed reaches a certain value, the position
estimated by the EKF based on the motor back-EMF model is valid. At this time, the I/F startup can be adjusted based on the estimated position of the EKF. The previous analysis demonstrates that the I/F startup strategy has a problem with fluctuating speed. The mismatch between the power angle and current value during stability will result in low current utilization. In this paper, a new method is proposed for adjusting the electrical angle frequency and current given by I/F startup using the effective position information estimated by EKF to decrease the speed fluctuation and increase the current utilization rate. Hence, a smooth transition to EKF speed closed-loop control is possible through the adjustment action. The block diagram of the whole control process of starting and switching is shown in
Figure 4.
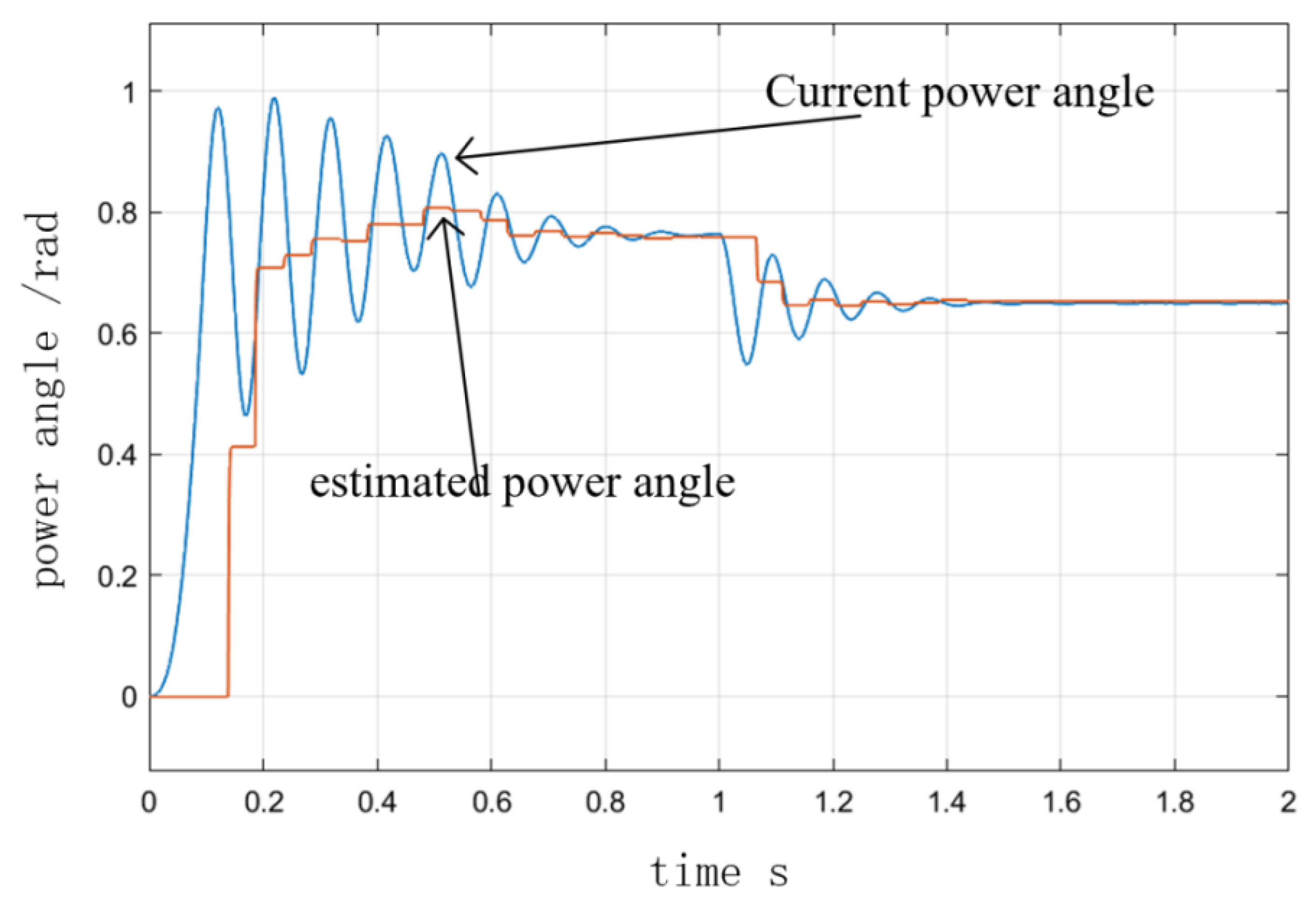
The speed fluctuation can be reduced by adding the damping torque component. The method requires that the power angle information is obtained from the position information estimated by the EKF and the information provided by the I/F startup. The final convergence power is determined using the fluctuation information of the estimated power angle. The value of the angle is compared to the current actual power angle, and the speed fluctuation is suppressed by the input of this value. This method effectively reduces speed fluctuations throughout the entire starting procedure and accelerates the convergence speed of the power angle.
The power angle is obtained from the angle estimated by EKF and the angle given by I/F startup as the following:
It can be seen from the previous analysis that in the I/F startup, the actual power angle
reciprocates around the steady-state power angle
. The angle between them is:
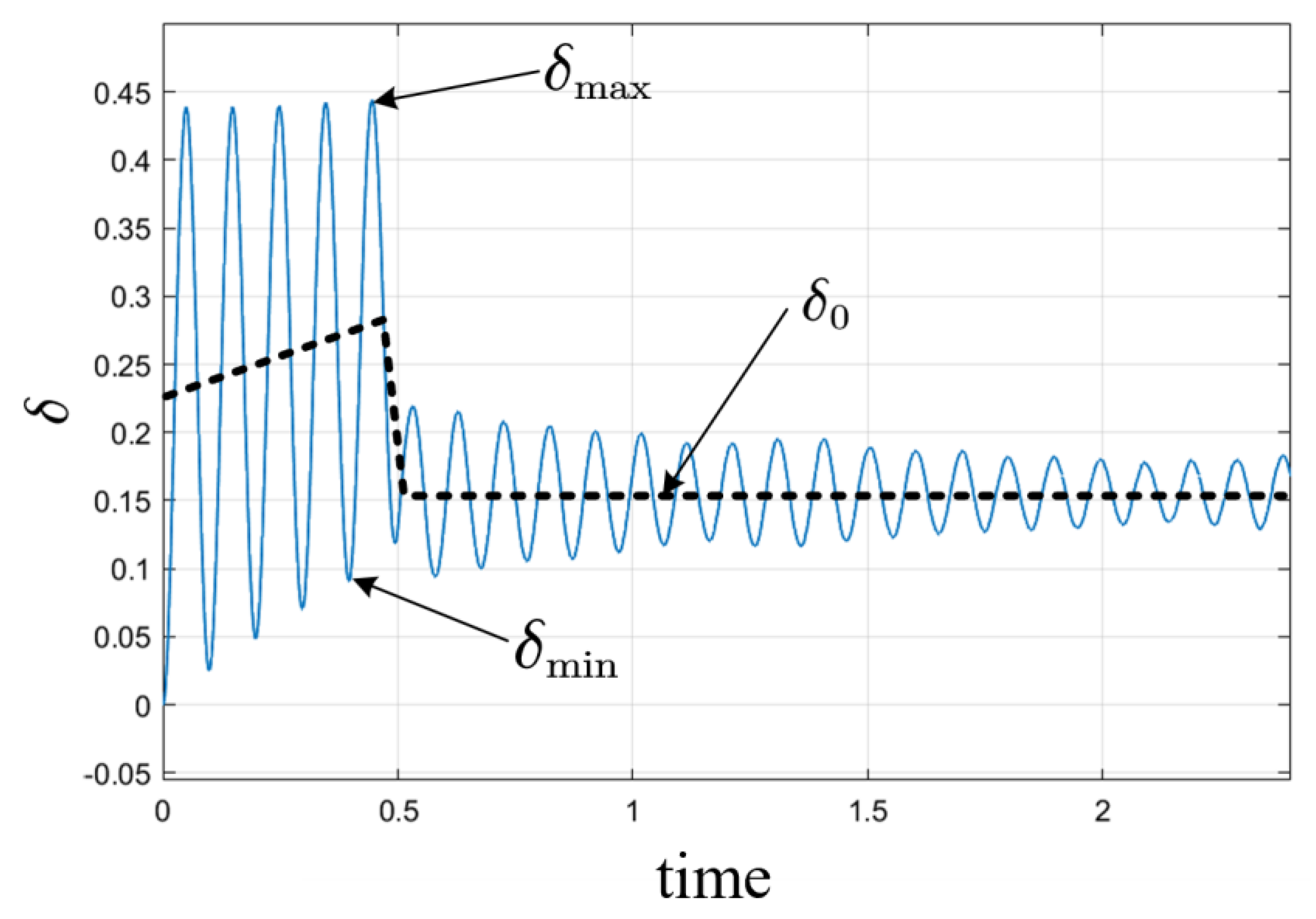
When and , record the value of the power angle at this moment as . When and , record the value of the power angle at this moment as . From Formula (19), it can be seen that the stable power angle is related to the speed and the load. When the torque load is constant, only the speed affects the power angle. It can be considered that the stable point of the power angle also changes uniformly with time in the stage of uniform acceleration. When the speed is at a constant speed, the stable point of the power angle remains unchanged.
As shown in
Figure 5, the steady-state power angle that can be estimated when the speed fluctuation reaches its extreme value is approximately:
where
is the
m-th maximum time,
is the
n-th minimum time, and
is the (
m +
n)-th extreme time, (
m,
n = 0, 1, 2…). In each cycle of speed fluctuation when the motor is accelerating uniformly, the power angle at other times of the speed fluctuation extreme value can be calculated by using the information of the power angle at the previous two extreme values as follows:
The power angle at the last extreme moment is denoted by
, and
is the time interval between the
moment and the
moment.
represents the proportional coefficient and its expression is:
where
represents the time difference between the first two extreme moments. When the speed is stable,
. After identifying the current power angle, the formula for adding a given damping torque to a given speed is as follows:
where
h is the feedback coefficient.
Adjusting the given current vector amplitude
iq can change the steady-state position of the power angle. To achieve a smooth transition between the two control methods, it is necessary to adjust the given current
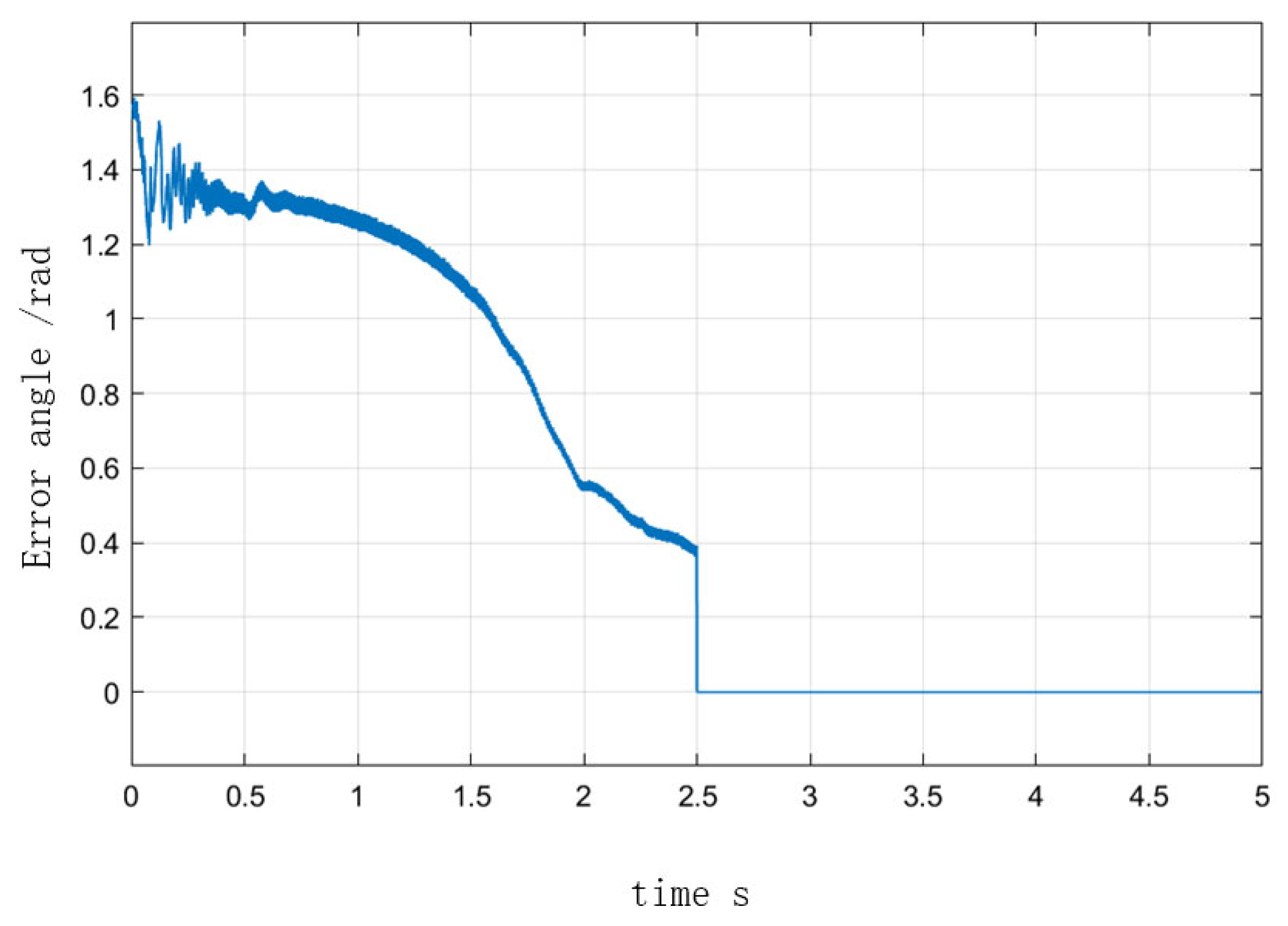
iq after the speed has been stabilized so that the virtual coordinate system in which the given current resides is identical to the one. Through the stable error angle of
determined above, the current is feedback adjusted to increase the utilization rate of the current. For the SPMSM, the ideal situation is when the
converges to zero. However, when
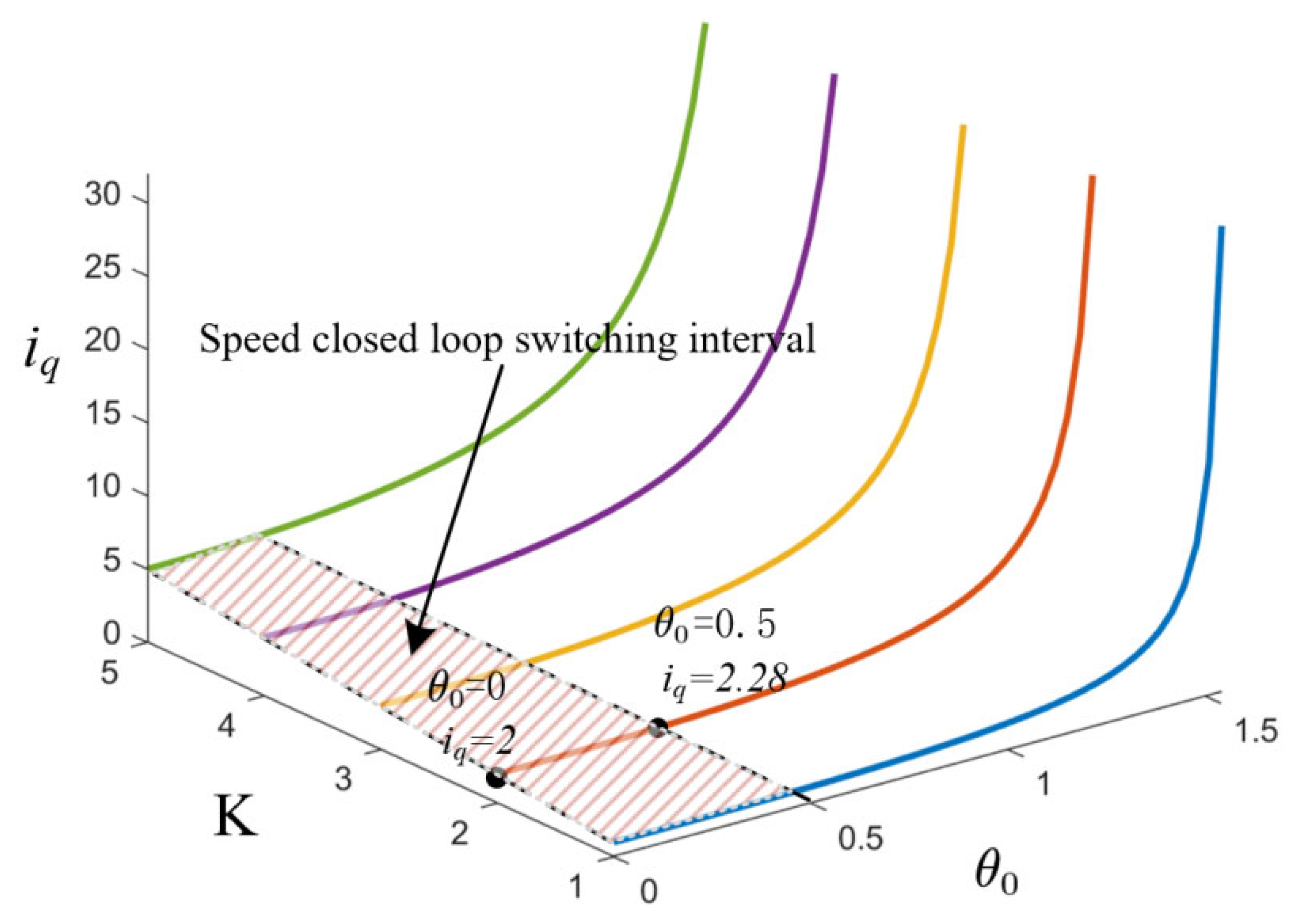
, the stability of the system will be greatly reduced. According to Formula (20), the relationship between the current and the error angle in the steady-state of the speed can be obtained as follows:
where
. When the speed and load are constant,
is constant too. As a result, the balance point curve of the
iq and stable error angle under different loads and speeds can be obtained, as shown in
Figure 6.
The figure illustrates that when the load is constant, and the rotational speed is stable, the sensitivity of the change in the difference angle to the current is greatly reduced as the difference angle approaches zero. This will result in the entire system becoming unstable. This paper designs a regulation mechanism to rapidly reduce the feedback amount to the current when the difference angle is less than a certain value, and to change the position of the switching point to increase the overall system’s stability during the current regulation process. This ensures that the current remains constant before and after switching to EKF high-speed control. Due to
in steady state, the regulation mechanism is expressed as follows:
where
Kp and
Ki represent PI regulator parameters,
denotes the reduction value of the given current
iq, and
is the switching point of the set interval. When the error angle
is reduced to
, it enters the switching interval. The feedback regulation relation between given current
iq and error angle is changed, which can reduce the change of
to adjust the current. The control mode under EKF can be regarded as
during closed-loop operation after switching. As can be seen from
Figure 6, the current
iq can be calculated as 114% of the speed closed-loop when
. Thus, at
less than the set point
, the current
iq at this time and the
iq after switching to the speed closed loop can be considered to be consistent. However, the stability is better than when
. Adjusting the PI regulator requires the addition of a low-pass filter because the switching current feedback is not smooth, and signal interference will result in a sudden change in torque and unstable rotation speed.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}