
CANAttack: Assessing Vulnerabilities within Controller Area Network
 , , and
, , and
Abstract
:1. Introduction
2. Background and Related Work
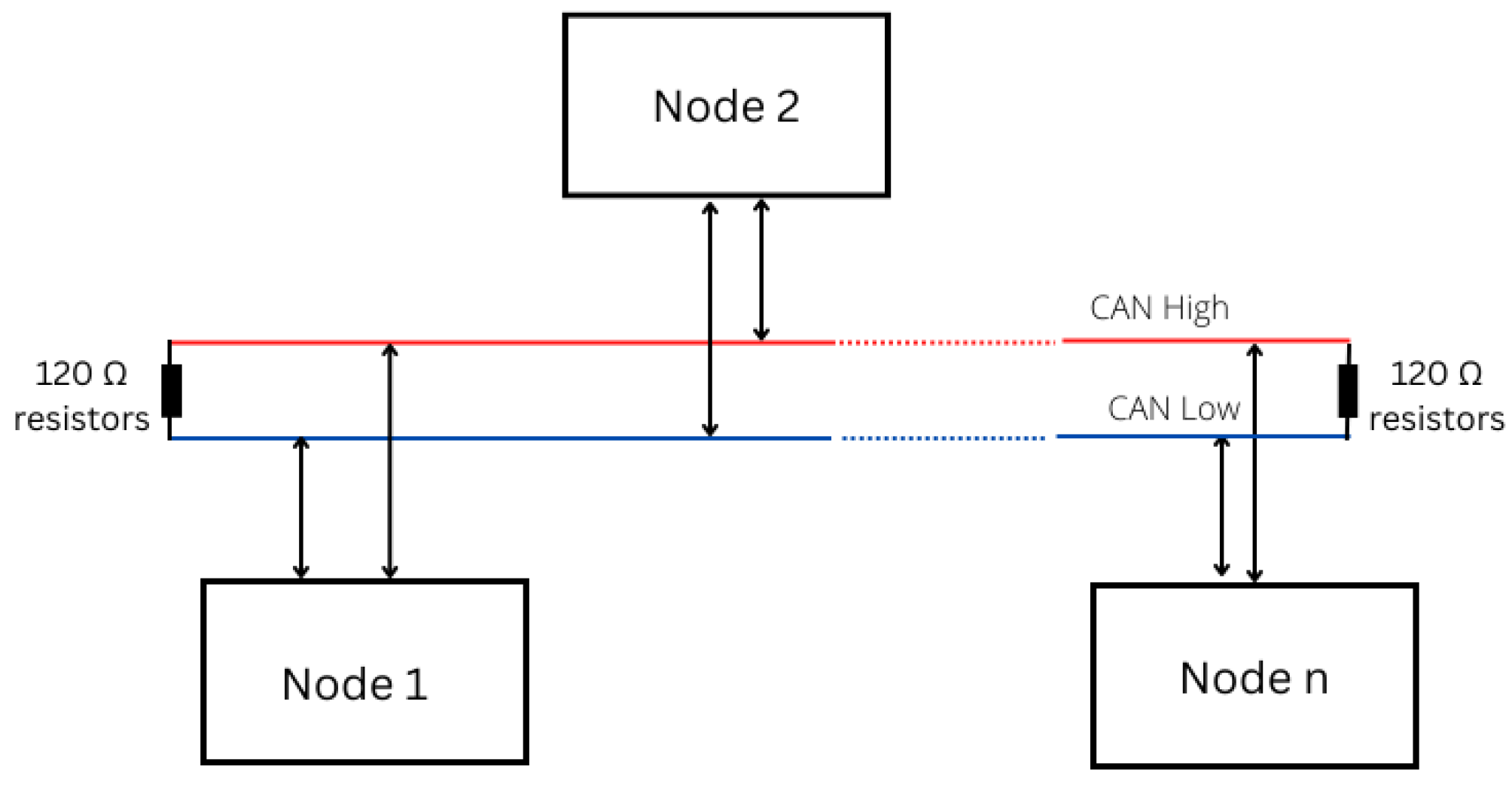
2.1. CAN Bus Overview
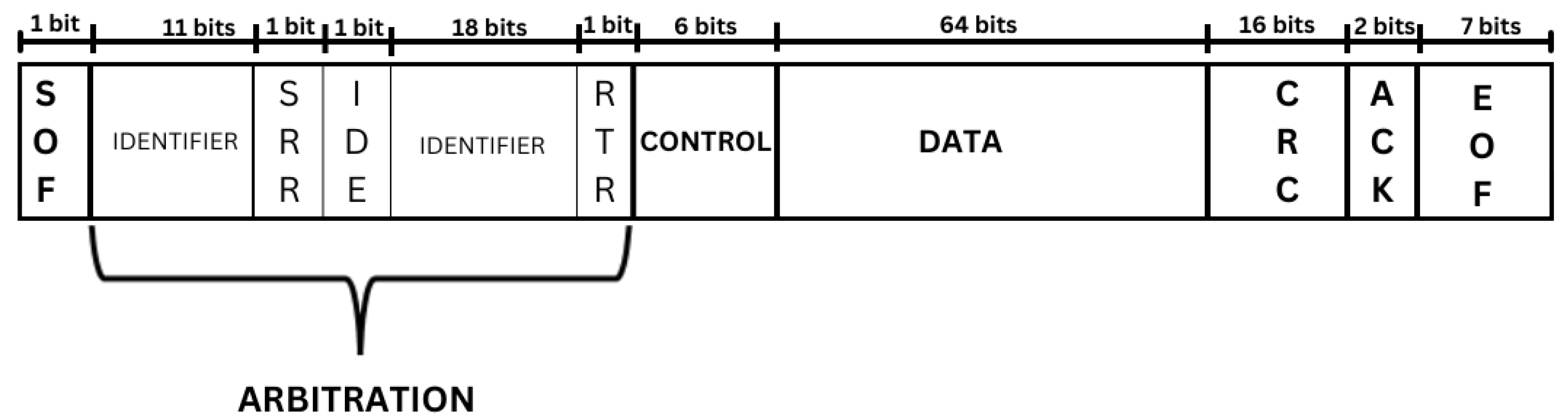
- SOF: This is the “Start of Frame”. This denotes the beginning of the message.
- Arbitration: This field consists of five components in the extended frame format.
- Identifier: This subfield decides which message takes precedence in the standard frame format.
- SRR: This stands for “Substitute Remote Request”. It contains 1 bit, and it is always recessive. It signifies that the bus uses data frames instead of remote request frames.
- IDE: This is the “Identifier Extension” sub-field. It signifies the frame format. The standard frame format is dominant “0”, and extended is represented as “1”.
- Identifier: These additional 18 bit are used to signify the arbitration on extended frame formats.
- RTR: This represents “Remote Transmission Request”. This sub-field is used to indicate if the frame is a request for data or the transmission of data.
- Control: This is used to represent the data length on the bus.
- Data: This is the actual message on the bus.
- CRC: This represents the “Cyclic Redundancy Check”. It checks for errors within the frame.
- ACK: The ACK sub-field is the “Acknowledgement”. It checks for the message’s reliability and integrity on the bus.
- EOF: EOF stands for “End of Frame”. It is always recessive (0).
2.2. Related Work
3. CAN Bus Testbed and Threats
3.1. Threat Model
- Spoofing attack:Spoofing occurs when a compromised node sends CAN data frames with a changed (forged) ID field to masquerade as data or a command from a valid-source ECU node. The spoofing attack is easy to adapt to the CAN bus model. It has adverse effects because it decreases communication performance on the network [40]. Since CAN lacks authentication and the bus is a broadcast network, a compromised ECU might readily deliver CAN frames with any ID, even IDs belonging to other legitimate/critical ECUs. In this research, we achieved this spoofing attack by assuming that, first, an attacker gains physical access to the CAN bus and connects to it, effectively becoming part of the network. Since messages sent via the bus are in plain text, they can easily monitor and understand messages sent and can then skillfully alter bits within the packet frame to manipulate the CAN ID, specifically changing the ID segment to the decimal number 0, which is represented in hexadecimal notation as 0x00.
- Injection attack:Generally, attackers use direct or indirect access points to inject messages into the CAN bus, suppress valid communications (i.e., genuine messages with higher-priority IDs than injected ones are ignored), or penetrate an ECU to perform malicious actions. Attacks against direct access points include the OBD-II port, CD player, and USB port [41]. In our case, we could inject futile messages to the bus via the WiFi node we attached to it. In our attack scenario, we implemented an injection attack where the attacker successfully spoofed the CAN ID to a high-priority ID, in particular 0x00. Consequently, the attacker’s node flooded the bus with fraudulent or irrelevant messages by either continually injecting arbitrary messages into the CAN bus or injecting unauthenticated messages with the spoofed ID into the vehicle. We explain the result of this implementation comprehensively in Section 5.
- Denial of Service (DoS) attack:The CAN protocol is also subject to DoS attacks. CAN’s arbitration system allows higher-priority nodes to talk first. Because of the prioritization on the CAN bus, if a malicious node with the highest priority is always active, the other nodes cannot interact.As shown in this research, an attacker can carry out a DoS attack to render a specific CAN bus system inoperable by conforming to the CAN standard or by breaching it [42]. We achieved this by transmitting as many messages to the CAN bus as physically possible with the smallest feasible ID (0x00). When the bus is idle, if two or more ECUs desire to transmit simultaneously, the one with the lowest ID will have priority (arbitration). As a result, we noticed in the logs that, because the zero ID takes precedence over all other message IDs, none of the normal messages will win the arbitration against the injected message, resulting in the prevention of signal transfer from the regular ECUs.
3.2. Hardware
3.3. Physical Structure of the CAN Testbed
4. Proposed Attack
- Data integrity: This means that the message sent was not altered by the time it reached the receiver. The CAN bus has a mechanism called the CRC embedded into the packet to check that the data reach their destination without any changes being made to it.
- Authentication: a process that verifies the validity of a node. The CAN bus does not have a mechanism to perform this check.
- Confidentiality: Only authorized users have access to the communication between sender and receiver.
- Non-repudiation: There should be a way to demonstrate that the parties involved in the communication cannot refute the message’s legitimacy.
- Availability: The system should ensure that message reliability is ensured under all conditions.
4.1. Proposed Attack Scenario
4.2. Metrics Used in the Research
- Implementation cycles:We conducted three separate runs for the implementation of the attack scenario. This approach aimed to examine the developing impact of the attack over time. As a result, we compared the system’s performance during normal operation with its performance during the attack operation throughout all three runs to provide a full assessment of the CAN bus operation and its capacity to handle attacks. Table 3 depicts the time for each run during analysis.
- Simulations:We monitored the traffic of the CAN system from two perspectives (normal simulation and attack simulation) in all three implementation cycles. Table 4 provides a description of these perspectives.
5. Experiments and Results
5.1. Test Run 1 Results
- Attack simulation: After we processed the data using Python, we observed that the compromised node with the ID 0x00 sent the most messages. We recorded the total packets sent from ID 0x00 as 432 packets in the observed time frame in the attack simulation. The next most-active message ID (0x6D) only sent 66 packets, which is an 84.72% decrease compared to the packets sent from the compromised message ID.
- Normal simulation: We then monitored the system in normal operations, i.e., without the compromised ID 0x00. In this simulation cycle, the message ID that displayed the highest activity (000000D1) transmitted 86 packets, while the following message ID (00000196) sent 82 packets. Our observation of all packets or frames transmitted throughout this simulation revealed an equitable distribution in the sent packets.
5.2. Test Run 2 Results
- Attack simulation: In this cycle, the compromised message ID (0x00) sent 3556 packets in 30 min. The following message ID with the second-highest count was 00000130. This message ID could only send 377 packets within 30 min of the attack operation. This shows a percentage difference of 842.72% between the packets sent by the compromised message ID and the legitimate message ID.
- Normal simulation: Upon analyzing the normal operation, messages were sent in an evenly distributed manner. The highest number of packets sent from a particular message ID was recorded as 106. The message ID that recorded this figure was 00000191, while the subsequent message ID sent 103 packets. Further analysis of the data processed in this phase revealed closely correlated figures in relation to the overall packets sent without any indications of irregular behavior.
5.3. Test Run 3 Result
- Attack simulation: In this cycle, the compromised node sent over 6112 packets, which is over two-times the total packets sent in Test Run 2. The following message ID sent only 642 packets, an astounding percentage decrease of 852.96% compared to the highest number of packets recorded for message ID 0x00. The major difference between the total packets sent by the compromised message ID and other message IDs in the simulation shows that the attacker had major control of the bus, thereby causing a DoS attack. We represent the total number of packets sent in this phase in Table 9.
- Normal simulation: In this simulation, like in the prior test runs discussed, we observed a fair access of each message ID to transfer signals via the bus by the uniform distribution of packets across the system. The highest number of packets sent was 120, from message ID 0000006D. The slight difference between the total number of packets recorded for each message ID in this phase indicates the absence of abnormal activities in this phase, as each message ID had a fair opportunity to transmit signals within the system. In Table 10, we present the total number of packets sent by each message ID within the 1 h time frame.
5.4. Latency of the CAN Bus System
- = timestamp for the current message transmitted on the bus from a specific ID.
- = timestamp for the preceding message transmission from the same message ID.
- = latency.
5.4.1. Latency of the System in Test Run 1
5.4.2. Latency of the System in Test Run 2
5.4.3. Latency of the System in Test Run 3
5.4.4. Average of the Latency in All Three Test Runs
- = represents each individual latency value in that particular simulation
- n = the total number of packets sent
- Average = average of the latency for that particular simulation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAN | Controller Area Network |
| ECU | Electronic Control Unit |
| MCU | Microcontroller |
| DoS | Denial of Service |
| ID | Identifier |
| CSV | Comma-Separated Values |
References
- Oladimeji, D.; Amar, R.; Narasimha, S.; Varol, C. A Testbed for a Controller Area Network Communication Protocol in Automobiles. In Proceedings of the 2023 IEEE 20th Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2023; pp. 1–6. [Google Scholar]
- Wei, P.; Wang, B.; Dai, X.; Li, L.; He, F. A novel intrusion detection model for the CAN bus packet of in-vehicle network based on attention mechanism and autoencoder. Digit. Commun. Netw. 2023, 9, 14–21. [Google Scholar] [CrossRef]
- Rasheed, A.; Baza, M.; Badr, M.; Alshahrani, H.; Choo, K. Efficient Crypto Engine for Authenticated Encryption, Data Traceability, and Replay Attack Detection Over CAN Bus Network. IEEE Trans. Netw. Sci. Eng. 2023, 1–17. [Google Scholar] [CrossRef]
- Amiri, W.; Baza, M.; Banawan, K.; Mahmoud, M.; Alasmary, W.; Akkaya, K. Privacy-Preserving Smart Parking System Using Blockchain and Private Information Retrieval. In Proceedings of the 2019 International Conference On Smart Applications, Communications And Networking (SmartNets), Sharm El Sheikh, Egypt, 17–19 December 2019; pp. 1–6. [Google Scholar]
- Baza, M.; Lasla, N.; Mahmoud, M.; Srivastava, G.; Abdallah, M. B-Ride: Ride Sharing With Privacy-Preservation, Trust and Fair Payment Atop Public Blockchain. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1214–1229. [Google Scholar] [CrossRef]
- Caivano, D.; De Vincentiis, M.; Nitti, F.; Pal, A. Quantum optimization for fast CAN bus intrusion detection. In Proceedings of the 1st International Workshop on Quantum Programming for Software Engineering, Singapore, 18 November 2022; pp. 15–18. [Google Scholar]
- Levy, E.; Shabtai, A.; Groza, B.; Murvay, P.S.; Elovici, Y. CAN-LOC: Spoofing detection and physical intrusion localization on an in-vehicle CAN bus based on deep features of voltage signals. IEEE Trans. Inf. Forensics Secur. 2023, 18, 4800–4814. [Google Scholar] [CrossRef]
- Oladimeji, D.; Gupta, K.; Kose, N.A.; Gundogan, K.; Ge, L.; Liang, F. Smart transportation: An overview of technologies and applications. Sensors 2023, 23, 3880. [Google Scholar] [CrossRef] [PubMed]
- Kiencke, U.; Dais, S.; Litschel, M. Automotive serial controller area network. SAE Trans. 1986, 95, 823–828. [Google Scholar]
- Lin, Y.; Chen, C.; Xiao, F.; Avatefipour, O.; Alsubhi, K.; Yunianta, A. An evolutionary deep learning anomaly detection framework for in-vehicle networks-CAN bus. IEEE Trans. Ind. Appl. 2020, 1. [Google Scholar] [CrossRef]
- Bozdal, M.; Samie, M.; Aslam, S.; Jennions, I. Evaluation of can bus security challenges. Sensors 2020, 20, 2364. [Google Scholar] [CrossRef]
- Farag, W.A. CANTrack: Enhancing automotive CAN bus security using intuitive encryption algorithms. In Proceedings of the 2017 7th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Sharjah, United Arab Emirates, 4–6 April 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gundu, R.; Maleki, M. Securing CAN bus in connected and autonomous vehicles using supervised machine learning approaches. In Proceedings of the 2022 IEEE International Conference on Electro Information Technology (eIT), Mankato, MN, USA, 19–21 May 2022; pp. 42–46. [Google Scholar]
- Kang, L.; Shen, H. Detection and mitigation of sensor and CAN bus attacks in vehicle anti-lock braking systems. ACM Trans. Cyber Phys. Syst. 2022, 6, 1–24. [Google Scholar] [CrossRef]
- Aldhyani, T.H.; Alkahtani, H. Attacks to automatous vehicles: A deep learning algorithm for cybersecurity. Sensors 2022, 22, 360. [Google Scholar] [CrossRef]
- Siddiqui, A.S.; Gui, Y.; Plusquellic, J.; Saqib, F. Secure communication over CANBus. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Medford, MA, USA, 6–9 August 2017; pp. 1264–1267. [Google Scholar]
- 11898-1; Road Vehicles–Controller Area Network (CAN)—Part 1: Data Link Layer and Physical Signalling. International Organization for Standardization: Geneva, Switzerland, 2015.
- Hartzell, S.; Stubel, C. Automobile CAN Bus Network Security and Vulnerabilities. Technical Report; University Washington: Seattle, WA, USA, 2017. [Google Scholar]
- Li, B.; Zhou, X.; Ning, Z.; Guan, X.; Yiu, K.F.C. Dynamic event-triggered security control for networked control systems with cyber-attacks: A model predictive control approach. Inf. Sci. 2022, 612, 384–398. [Google Scholar] [CrossRef]
- Zhang, J.; Peng, S.; Gao, Y.; Zhang, Z.; Hong, Q. APMSA: Adversarial perturbation against model stealing attacks. IEEE Trans. Inf. Forensics Secur. 2023, 18, 1667–1679. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, J.; Li, Z.; Cheng, X.; Wu, L. Jamming and Eavesdropping Defense Scheme Based on Deep Reinforcement Learning in Autonomous Vehicle Networks. IEEE Trans. Inf. Forensics Secur. 2023, 18, 1211–1224. [Google Scholar] [CrossRef]
- Cao, K.; Wang, B.; Ding, H.; Lv, L.; Dong, R.; Cheng, T.; Gong, F. Improving physical layer security of uplink NOMA via energy harvesting jammers. IEEE Trans. Inf. Forensics Secur. 2020, 16, 786–799. [Google Scholar] [CrossRef]
- Zhang, H.; Mi, Y.; Fu, Y.; Liu, X.; Zhang, Y.; Wang, J.; Tan, J. Security defense decision method based on potential differential game for complex networks. Comput. Secur. 2023, 129, 103187. [Google Scholar] [CrossRef]
- Chen, P.; Liu, H.; Xin, R.; Carval, T.; Zhao, J.; Xia, Y.; Zhao, Z. Effectively detecting operational anomalies in large-scale iot data infrastructures by using a gan-based predictive model. Comput. J. 2022, 65, 2909–2925. [Google Scholar] [CrossRef]
- Zheng, W.; Deng, P.; Gui, K.; Wu, X. An Abstract Syntax Tree based static fuzzing mutation for vulnerability evolution analysis. Inf. Softw. Technol. 2023, 158, 107194. [Google Scholar] [CrossRef]
- Lin, C.W.; Sangiovanni-Vincentelli, A. Cyber-security for the controller area network (CAN) communication protocol. In Proceedings of the 2012 International Conference on Cyber Security, Alexandria, VA, USA, 14–16 December 2012; pp. 1–7. [Google Scholar]
- Tariq, S.; Lee, S.; Kim, H.K.; Woo, S.S. CAN-ADF: The controller area network attack detection framework. Comput. Secur. 2020, 94, 101857. [Google Scholar] [CrossRef]
- Hoppe, T.; Dittman, J. Sniffing/Replay Attacks on CAN Buses: A simulated attack on the electric window lift classified using an adapted CERT taxonomy. In Proceedings of the 2nd Workshop on Embedded Systems Security (WESS), Salzburg, Austria, 30 September–5 October 2007; pp. 1–6. [Google Scholar]
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Berleley/Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar]
- Nie, S.; Liu, L.; Du, Y. Free-fall: Hacking tesla from wireless to can bus. Brief. Black Hat 2017, 25, 16. [Google Scholar]
- Avatefipour, O.; Malik, H. State-of-the-art survey on in-vehicle network communication (CAN-Bus) security and vulnerabilities. arXiv 2018, arXiv:1802.01725. [Google Scholar]
- Zhang, H.; Meng, X.; Zhang, X.; Liu, Z. CANsec: A practical in-vehicle controller area network security evaluation tool. Sensors 2020, 20, 4900. [Google Scholar] [CrossRef] [PubMed]
- Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; Savage, S.; Koscher, K.; Czeskis, A.; Roesner, F.; Kohno, T. Comprehensive experimental analyses of automotive attack surfaces. In Proceedings of the 20th USENIX Security Symposium (USENIX Security 11), San Francisco, CA, USA, 8–12 August 2011. [Google Scholar]
- Payne, B.R. Car hacking: Accessing and exploiting the can bus protocol. Comprehensive experimental analyses of automotive attack surfaces. J. Cybersecur. Educ. Res. Pract. 2019, 2019, 5. [Google Scholar]
- Iehira, K.; Inoue, H.; Ishida, K. Spoofing attack using bus-off attacks against a specific ECU of the CAN bus. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–4. [Google Scholar]
- Bloom, G. WeepingCAN: A stealthy CAN bus-off attack. In Proceedings of the Workshop on Automotive and Autonomous Vehicle Security, Online, 25 February 2021. [Google Scholar]
- Mohammed, A.Z.; Man, Y.; Gerdes, R.; Li, M.; Celik, Z.B. Physical layer data manipulation attacks on the can bus. In Proceedings of the International Workshop on Automotive and Autonomous Vehicle Security (AutoSec), San Diego, CA, USA, 24 April 2022. [Google Scholar]
- Miller, C.; Valasek, C. A survey of remote automotive attack surfaces. Black Hat 2014, 2014, 94. [Google Scholar]
- Greenberg, A. Hackers Remotely Kill a Jeep on the Highway-With Me in It. Wired 2015, 7, 21–22. [Google Scholar]
- Yang, Y.; Duan, Z.; Tehranipoor, M. Identify a spoofing attack on an in-vehicle CAN bus based on the deep features of an ECU fingerprint signal. Smart Cities 2020, 3, 17–30. [Google Scholar] [CrossRef]
- Hartzell, S.; Stubel, C.; Bonaci, T. Security analysis of an automobile controller area network bus. IEEE Potentials 2020, 39, 19–24. [Google Scholar] [CrossRef]
- Gazdag, A.; Ferenczi, C.; Buttyán, L. Development of a man-in-the-middle attack device for the can bus. In Proceedings of the 1st Conference on Information Technology and Data Science, Debrecen, Hungary, 6–8 November 2020. [Google Scholar]
- Lau, I.; Ekpo, S.; Zafar, M.; Ijaz, M.; Gibson, A. Hybrid mmWave-Li-Fi 5G Architecture for Reconfigurable Variable Latency and Data Rate Communications. IEEE Access 2023, 11, 42850–42861. [Google Scholar] [CrossRef]
- Rajapaksha, S.; Kalutarage, H.; Al-Kadri, M.O.; Madzudzo, G.; Petrovski, A.V. Keep the moving vehicle secure: Context-aware intrusion detection system for in-vehicle CAN bus security. In Proceedings of the 2022 14th International Conference on Cyber Conflict: Keep Moving!(CyCon), Tallinn, Estonia, 31 May–3 June 2022; Volume 700, pp. 309–330. [Google Scholar]
- Tindell, K.; Burns, A.; Wellings, A.J. Calculating controller area network (CAN) message response times. Control Eng. Pract. 1995, 3, 1163–1169. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Purpose |
|---|---|
| STM Nucleuo– F103RB | The Microcontroller (MCU) used for the research. |
| MCP 2551 | Transceivers to allow for the CAN communication on the |
| CL2000 | This device was used to log CAN traffic from the bus (i.e., the sniffer). It included the timestamps, data length, bus rate, and message IDs. |
| PicoScope 2204A | An oscilloscope used to decode the traffic sniffed from the bus. |
| ECU | Number of Assigned Message ID | Message ID (Hexadecimal Notations) |
|---|---|---|
| ECU 1 | 10 | 0x64 – 0x82 |
| ECU 2 | 10 | 0xC9 – 0xDC |
| ECU 3 | 10 | 0x12C – 0x14A |
| Compromised ECU | 1 | 0x00 |
| Implementation Cycles | Time Interval |
|---|---|
| Test Run 1 | 15 min |
| Test Run 2 | 30 min |
| Test Run 3 | 60 min |
| Perspective | Description |
|---|---|
| Normal Simulation | This represents the operation where all four nodes are working properly without any attack. In this case, we assigned ten message IDs to each node. |
| Attack Simulation | In this scenario analysis, we examined the performance of a system operating during the attack scenario discussed earlier. That is, one compromised node continuously injected messages into the bus with ID 0x000. |
| Message ID | Packets Sent in 15 min |
|---|---|
| 00000000 | 432 |
| 0000006D | 66 |
| 00000191 | 53 |
| 00000069 | 52 |
| 00000192 | 50 |
| 00000195 | 49 |
| 00000065 | 49 |
| 00000196 | 49 |
| 0000006A | 48 |
| 00000193 | 46 |
| 00000197 | 43 |
| 00000199 | 43 |
| 0000006C | 41 |
| 00000194 | 41 |
| 00000067 | 41 |
| 0000006B | 40 |
| 00000066 | 39 |
| 00000064 | 38 |
| Message ID | Packets Sent in 15 min |
|---|---|
| 000000D1 | 86 |
| 00000196 | 82 |
| 0000006D | 79 |
| 00000195 | 79 |
| 00000191 | 75 |
| 000000CC | 70 |
| 00000193 | 69 |
| 000000C9 | 69 |
| 00000192 | 68 |
| 00000068 | 68 |
| 000000CD | 68 |
| 000000CA | 68 |
| 00000065 | 67 |
| 00000194 | 65 |
| 0000006A | 65 |
| 0000006C | 64 |
| 000000CE | 64 |
| 00000064 | 64 |
| Message ID | Packets Sent in 30 min |
|---|---|
| 00000000 | 3556 |
| 00000130 | 377 |
| 00000134 | 376 |
| 00000194 | 376 |
| 00000198 | 376 |
| 00000196 | 374 |
| 00000132 | 374 |
| 00000195 | 373 |
| 0000006A | 372 |
| 00000131 | 372 |
| 00000067 | 372 |
| 0000012F | 370 |
| 00000193 | 370 |
| 0000006D | 365 |
| 0000012D | 364 |
| 00000191 | 364 |
| 00000065 | 361 |
| 00000068 | 354 |
| 00000064 | 352 |
| 0000012E | 352 |
| 00000069 | 352 |
| 00000192 | 352 |
| 00000066 | 349 |
| 0000006B | 346 |
| 00000133 | 339 |
| Message ID | Packets Sent in 30 min |
|---|---|
| 00000191 | 106 |
| 00000195 | 103 |
| 00000196 | 101 |
| 0000006D | 100 |
| 00000065 | 95 |
| 0000006C | 93 |
| 00000192 | 92 |
| 0000006A | 91 |
| 00000066 | 88 |
| 00000067 | 87 |
| 00000193 | 87 |
| 000000D1 | 86 |
| 0000006B | 85 |
| 00000068 | 85 |
| 00000194 | 84 |
| 00000069 | 84 |
| 00000064 | 83 |
| 00000198 | 82 |
| 00000197 | 78 |
| 000000C9 | 74 |
| 000000CC | 74 |
| 000000CA | 74 |
| 00000199 | 72 |
| 000000CD | 70 |
| 000000CE | 68 |
| Message ID | Packets Sent in 60 min |
|---|---|
| 00000000 | 6112 |
| 00000067 | 642 |
| 00000196 | 635 |
| 00000132 | 635 |
| 0000006D | 632 |
| 00000130 | 631 |
| 00000194 | 631 |
| 00000133 | 626 |
| 00000198 | 625 |
| 00000197 | 625 |
| 00000134 | 625 |
| 0000012F | 624 |
| 00000193 | 624 |
| 0000006A | 623 |
| 00000064 | 622 |
| 0000012E | 616 |
| 00000192 | 616 |
| 00000069 | 615 |
| 0000012D | 614 |
| 00000191 | 614 |
| 00000066 | 613 |
| 00000131 | 611 |
| 00000195 | 611 |
| Message ID | Packets Sent in 60 min |
|---|---|
| 0000006D | 120 |
| 00000195 | 115 |
| 00000065 | 110 |
| 0000006A | 108 |
| 00000191 | 107 |
| 00000196 | 105 |
| 0000006C | 105 |
| 00000068 | 103 |
| 00000067 | 103 |
| 0000006B | 100 |
| 00000066 | 96 |
| 00000064 | 96 |
| 00000192 | 94 |
| 00000193 | 93 |
| 00000069 | 91 |
| 00000194 | 91 |
| 00000198 | 88 |
| 00000197 | 84 |
| 000000D1 | 84 |
| 00000199 | 80 |
| 000000CC | 72 |
| 000000C9 | 72 |
| 000000CA | 68 |
| Simulation | Average for Normal Simulation (ms) | Average for Attack Simulation (ms) |
|---|---|---|
| Test Run 1 | 189.137 | 183.124 |
| Test Run 2 | 210.080 | 147.188 |
| Test Run 3 | 225.965 | 147.189 |
| Implementation Cycle | Simulation | Observations |
|---|---|---|
| Test Run 1 | Attack Simulation |
|
| Normal Simulation |
| |
| Test Run 2 | Attack Simulation |
|
| Normal Simulation |
| |
| Test Run 3 | Attack Simulation |
|
| Normal Simulation |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oladimeji, D.; Rasheed, A.; Varol, C.; Baza, M.; Alshahrani, H.; Baz, A. CANAttack: Assessing Vulnerabilities within Controller Area Network. Sensors 2023, 23, 8223. https://doi.org/10.3390/s23198223
Oladimeji D, Rasheed A, Varol C, Baza M, Alshahrani H, Baz A. CANAttack: Assessing Vulnerabilities within Controller Area Network. Sensors. 2023; 23(19):8223. https://doi.org/10.3390/s23198223
Chicago/Turabian StyleOladimeji, Damilola, Amar Rasheed, Cihan Varol, Mohamed Baza, Hani Alshahrani, and Abdullah Baz. 2023. "CANAttack: Assessing Vulnerabilities within Controller Area Network" Sensors 23, no. 19: 8223. https://doi.org/10.3390/s23198223