

Multi-NDE Technology Approach to Improve Interpretation of Corrosion in Concrete Bridge Decks Based on Electrical Resistivity Measurements


Abstract
:1. Introduction
2. Algorithm Development
2.1. Finite Element Modeling
- Degree of saturation (DoS): Seven values have been chosen to represent the degree of saturation: 20%, 30%, 40%, 50%, 60%, 70%, and 80%. This range of values represents different moisture conditions in the slab.
- Corrosion length (CL): A set of four values that represent the corrosion length of the steel rebar. These lengths are used as the anode segment in the corrosion process, which are 2.5 cm, 5 cm, 10 cm, and 15 cm.
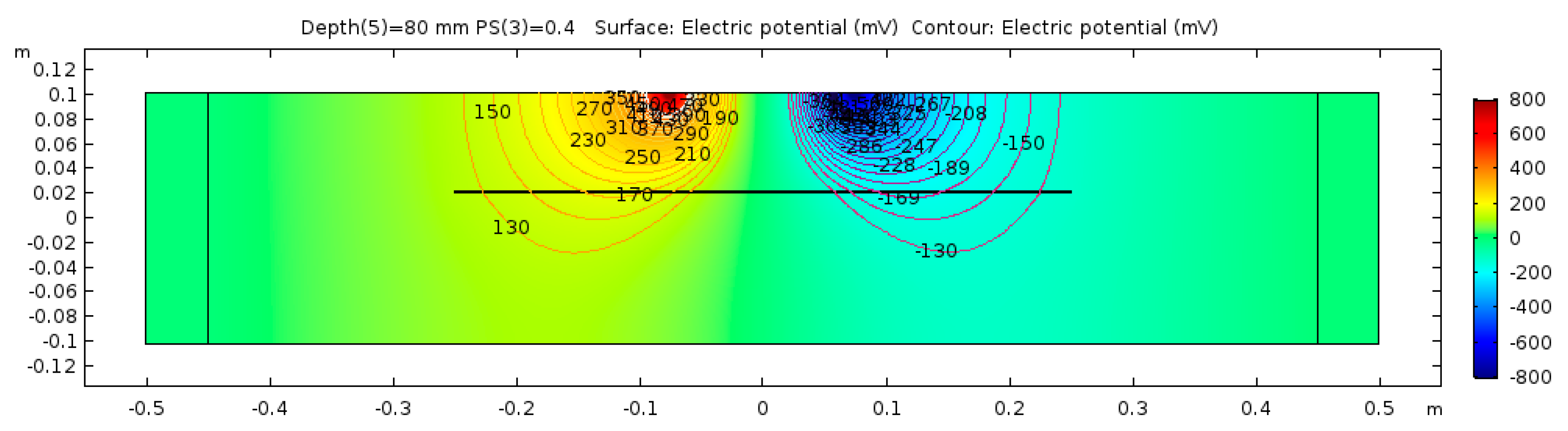
- Delamination depth (DD): The delamination depth has been simulated to represent a crack at various depths. A set of six values has been selected: 40 mm, 50 mm, 60 mm, 70 mm, 80 mm, and 90 mm.
- Concrete cover (CC) thickness: a set of four values has been selected to simulate the concrete cover thickness: 38 mm, 51 mm, 63 mm, and 76 mm.
- The moisture condition of the delamination: Two different conditions have been chosen to represent the moisture condition of the delamination inside the concrete. The first one is air-filled delamination (AFD), which represents completely dry delamination, and the second condition is water-filled delamination (WFD), which represents fully saturated delamination.
2.1.1. Impact Echo Simulation
- T = the depth of the reflector
- β = the correction factor (0.96 for plate-like structures)
- Cp = the P-wave velocity
- f = the dominant frequency
2.1.2. Electrical Resistivity Simulation
- ρ = Electrical resistivity
- k = Geometrical factor of a Wenner acquisition array
- V = Potential measured (Voltage)
- I = Electrical current applied
- a = Spacing between the probes
2.1.3. Half-Cell Potential Simulation
2.2. Machine-Learning Algorithm
Random Forest Algorithm
- X = input random vector.
- =statistical performance factor.
- = coordinate space.
- p = real numbers.
- = square-integrable random response.
- = regression function.
- = Euclidean space.
- = regression function estimate (mean squared error).
- = the data set of independent random variables.
- = independent prototype pair.
- = independent random variables.
- = the set of data points selected prior to the tree construction.
- = the cell containing x.
- = the number of points that fall into the cell.
- Degree of Saturation: the attribute is a Numerical variable that has a Feature role.
- Length of Corrosion: the attribute is a Numerical variable that has a Meta role.
- Delamination Depth: the attribute is a Numerical variable that has a Feature role.
- Concrete Cover: the attribute is a Numerical data variable that has a Feature role.
- Delamination M.C: the attribute is a Categorical variable that has a Meta role.
- Measured Resistivity: the attribute is a Numerical variable that has a Feature role.
- Measured HCP: the attribute is a Numerical variable that has a Feature role.
- Actual Resistivity: the attribute is a Numerical variable that has a Target role.
3. Algorithm Implementation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Layssi, H.; Ghods, P.; Alizadeh, A.R.; Salehi, M. Electrical Resistivity of Concrete. Concr. Int. 2015, 37, 293–302. [Google Scholar]
- Sengul, O.; Gjørv, O.E. Electrical resistivity measurements for quality control during concrete construction. ACI Mater. J. 2008, 105, 541. [Google Scholar]
- Silva, P.C.; Ferreira, R.M.; Figueiras, H. Electrical Resistivity as a Means of Quality Control of Concrete—Influence of Test Procedure. In Proceedings of the International Conference on Durability of Building Materials and Components, Porto, Portugal, 12–15 April 2011; pp. 1–8. [Google Scholar]
- Sengul, O. Use of electrical resistivity as an indicator for durability. Constr. Build. Mater. 2014, 73, 434–441. [Google Scholar] [CrossRef]
- Robles, K.P.V.; Yee, J.-J.; Kee, S.-H. Electrical Resistivity Measurements for Nondestructive Evaluation of Chloride-Induced Deterioration of Reinforced Concrete—A Review. Materials 2022, 15, 2725. [Google Scholar] [CrossRef]
- Azarsa, P.; Gupta, R. Electrical Resistivity of Concrete for Durability Evaluation: A Review. Adv. Mater. Sci. Eng. 2017, 2017, 8453095. [Google Scholar] [CrossRef]
- Hornbostel, K.; Larsen, C.K.; Geiker, M.R. Relationship between concrete resistivity and corrosion rate—A literature review. Cem. Concr. Compos. 2013, 39, 60–72. [Google Scholar] [CrossRef]
- Sanchez Marquez, J.M. Influence of Saturation and Geometry on Surface Electrical Resistivity Measurements. Ph.D. Thesis, Concordia University, Montreal, QC, Canada, 2015. [Google Scholar]
- Elkey, W.; Sellevold, E.J. Electrical Resistivity of Concrete. 1995. Available online: https://vegvesen.brage.unit.no/vegvesen-xmlui/bitstream/handle/11250/191626/Publication%2080.pdf?sequence=1 (accessed on 11 October 2021).
- Gowers, K.; Millard, S. Measurement of concrete resistivity for assessment of corrosion. ACI Mater. J. 1999, 96, 536–541. [Google Scholar]
- Weiss, J.; Snyder, K.; Bullard, J.; Bentz, D. Using a saturation function to interpret the electrical properties of partially saturated concrete. J. Mater. Civ. Eng. 2013, 25, 1097–1106. [Google Scholar] [CrossRef]
- Lataste, J.F.; Breysse, D. A Study on the variability of electrical resistivity of concrete. In Nondestructive Testing of Materials and Structures; Springer: Berlin/Heidelberg, Germany, 2013; pp. 255–261. [Google Scholar]
- Khudhair, M.J.; Gucunski, N. Effects of Concrete Delamination and Cracking on Electrical Resistivity Measurement Results. In Proceedings of the NDE/NDT for Highways & Bridges: SMT 2018, New Brunswick, NJ, USA, 27–29 August 2018. [Google Scholar]
- ASTM C1760-12; Standard Test Method for Bulk Electrical Conductivity of Hardened Concrete. ASTM International: West Conshohocken, PA, USA, 2012.
- Gucunski, N.; Romero, F.A.; Shokouhi, P.; Makresias, J. Complementary Impact Echo and Ground Penetrating Radar Evaluation of Bridge Decks on I-84 Interchange in Connecticut. In Earthquake Engineering and Soil Dynamics; ACSE: Lawrence, KS, USA, 2005; pp. 1–10. [Google Scholar] [CrossRef]
- Gucunski, N.; Yan, M.; Wang, Z.; Fang, T.; Maher, A. Rapid bridge deck condition assessment using three-dimensional visualization of impact echo data. J. Infrastruct. Syst. 2012, 18, 12–24. [Google Scholar] [CrossRef]
- Sansalone, M.J.; Streett, W.B. Impact-Echo: Nondestructive Evaluation of Concrete and Masonry; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1997. [Google Scholar]
- ASTM C876-15; Standard test method for corrosion potentials of uncoated reinforcing steel in concrete. ASTM International: West Conshohocken, PA, USA, 2015.
- Ho, T.K. Random decision forests. In Proceedings of the 3rd International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–16 August 1995; Volume 1, pp. 278–282. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Properties | |
|---|---|---|
| Electrical Conductivity (S/m) | Relative Permittivity | |
| Concrete | 0.002 | 4.5 |
| Water * | 0.5 | 88.1 |
| Air * | 3 × 10−15 | 1 |
| Property | Value |
|---|---|
| Density | 144.75 lb/ft3 |
| Compressive strength | 5060 psi |
| Modulus of Elasticity | 3400 ksi |
| Splitting tensile strength | 355 psi |
| Modulus of rapture | 695 psi |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khudhair, M.; Gucunski, N. Multi-NDE Technology Approach to Improve Interpretation of Corrosion in Concrete Bridge Decks Based on Electrical Resistivity Measurements. Sensors 2023, 23, 8052. https://doi.org/10.3390/s23198052
Khudhair M, Gucunski N. Multi-NDE Technology Approach to Improve Interpretation of Corrosion in Concrete Bridge Decks Based on Electrical Resistivity Measurements. Sensors. 2023; 23(19):8052. https://doi.org/10.3390/s23198052
Chicago/Turabian StyleKhudhair, Mustafa, and Nenad Gucunski. 2023. "Multi-NDE Technology Approach to Improve Interpretation of Corrosion in Concrete Bridge Decks Based on Electrical Resistivity Measurements" Sensors 23, no. 19: 8052. https://doi.org/10.3390/s23198052