

Random Telegraph Noise Degradation Caused by Hot Carrier Injection in a 0.8 μm-Pitch 8.3Mpixel Stacked CMOS Image Sensor †
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Chip Architecture and Characteristics
2.2. Hot Carrier Injection Characterization and Hot Carrier Stress Experiments
3. Results
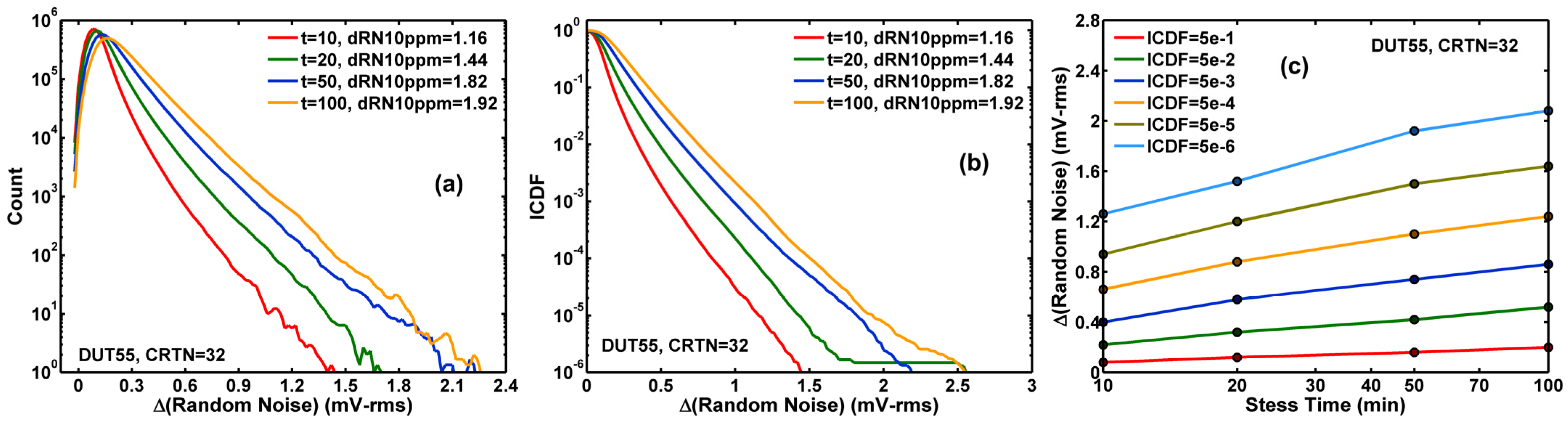
3.1. Threshold Voltage Shift and Random Noise Degradation
3.2. Key Findings: The Differences between Vt Shift and RN Degradation
3.3. Tracking the Degradation of Individual Devices
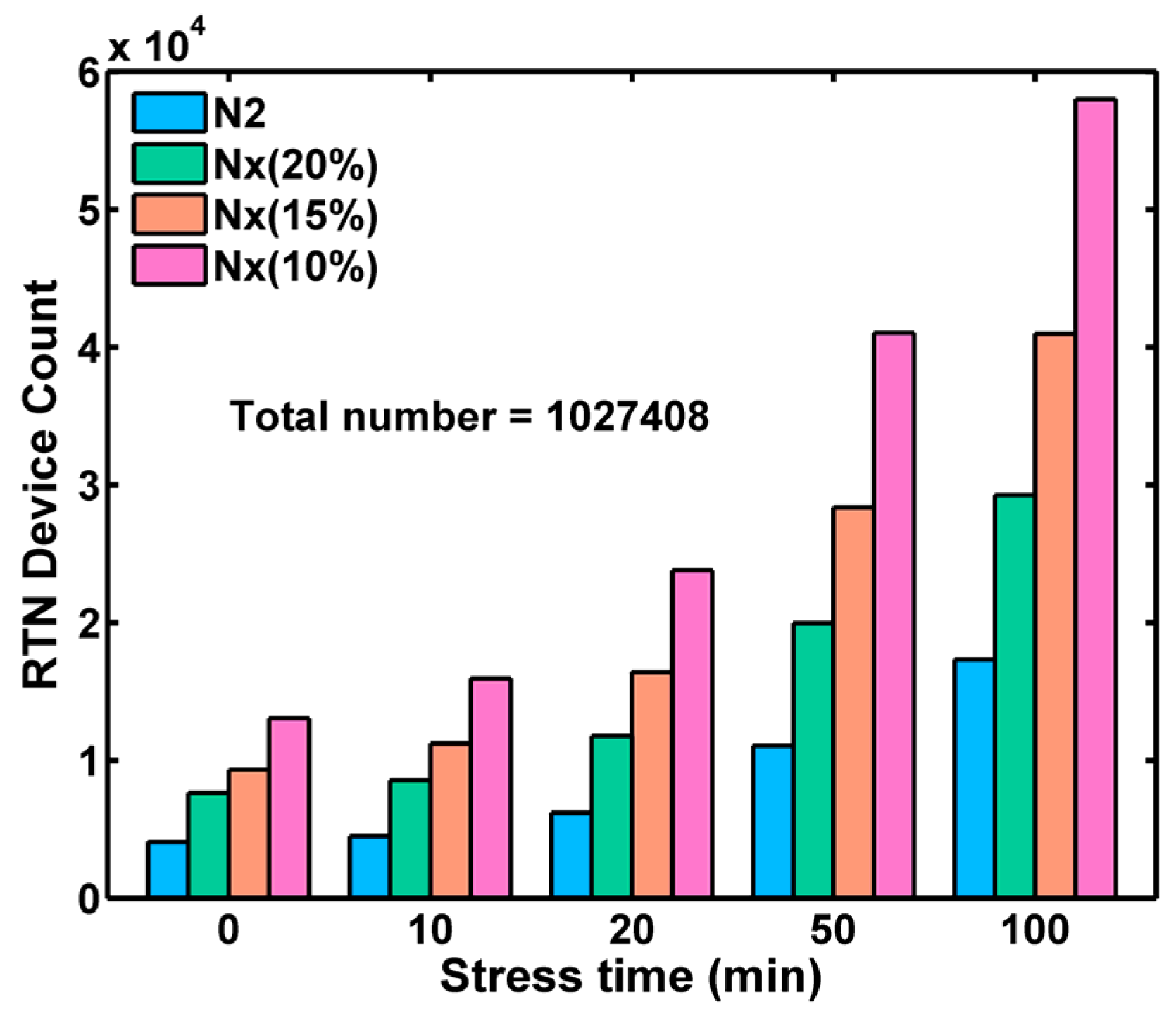
3.4. Idenfying the RTN Devices
3.5. Voltage Dependency
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.; Choi, W.; Park, D.; Jeoung, H.; Kim, B.; Oh, Y.; Oh, S.; Park, B.; Kim, E.; Lee, Y.; et al. A 1/2.8-inch 24Mpixel CMOS image sensor with 0.9um unit pixels separated by full-depth deep-trench isolation. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 84–85. [Google Scholar] [CrossRef]
- Hasegawa, T.; Watanabe, K.; Jung, Y.J.; Tanaka, N.; Nakashikiryo, T.; Yang, W.-Z.; Hsiung, A.C.-W.; Lin, Z.; Manabe, S.; Venezia, V.C.; et al. A new 0.8um CMOS image sensor with low RTS noise and high full well capacity. In Proceedings of the Int’l Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 June 2019; pp. 4–7. Available online: https://www.imagesensors.org/Past%20Workshops/2019%20Workshop/2019%20Papers/R02.pdf (accessed on 26 July 2023).
- Park, D.; Lee, S.-W.; Han, J.; Jang, D.; Kwon, H.; Cha, S.; Kim, M.; Lee, H.; Suh, S.; Joo, W.; et al. A 0.8 μm smart dual conversion gain pixel for 64 Megapixels CMOS image sensor with 12k e-full-well capacitance and low dark noise. In Proceedings of the IEEE Int’l Electron Devices Meeting (IEDM), San Francisco, CA, USA, 7–11 December 2019; pp. 16.2.1–16.2.4. [Google Scholar] [CrossRef]
- Okawa, T.; Ooki, S.; Yamajo, H.; Kawada, M.; Tachi, M.; Goi, K.; Yamasaki, T.; Iwashita, H.; Nakamizo, M.; Ogasahara, T.; et al. A 1/2 inch 48 M all PDAF CMOS image sensor using 0.8 μm quad Bayer coding 2 × 2 OCL with 1.0 lux minimum AF illuminance level. In Proceedings of the IEEE Int’l Electron Devices Meeting (IEDM), San Francisco, CA, USA, 7–11 December 2019; pp. 16.3.1–16.3.4. [Google Scholar] [CrossRef]
- Kim, H.C.; Park, J.; Joe, I.; Kwon, D.; Kim, J.H.; Cho, D.; Lee, T.; Lee, C.; Park, H.; Hong, S.; et al. A 1/2.65in 44Mpixel CMOS image sensor with 0.7 μm pixels fabricated in advanced full-depth deep-trench isolation technology. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 16–20 February 2020; pp. 104–105. [Google Scholar] [CrossRef]
- Nakazawa, K.; Yamamoto, J.; Mori, S.; Okamoto, S.; Shimizu, A.; Baba, K.; Fujii, N.; Uehara, M.; Hiramatsu, K.; Kumano, H.; et al. 3D sequential process integration for CMOS image sensor. In Proceedings of the IEEE Int’l Electron Devices Meeting (IEDM), San Francisco, CA, USA, 11–15 December 2021; pp. 30.4.1–30.4.4. [Google Scholar] [CrossRef]
- Park, J.E.; Park, S.; Cho, K.; Lee, T.; Lee, C.; Kim, D.H.; Lee, B.; Kim, S.; Ji, H.-C.; Im, D.M.; et al. 1/2.74-inch 32Mpixel-prototype CMOS image sensor with 0.64 μm unit pixels separated by full-depth deep-trench isolation. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), Online, 13–22 February 2021; pp. 122–123. [Google Scholar] [CrossRef]
- Uchiyama, M.; Park, G.; Lee, S.; Tate, T.; Minagawa, M.; Shimoyamada, S.; Lin, Z.; Yeung, K.W.; Tu, L.; Yang, W.Z.; et al. A 40/22 nm 200MP stacked CMOS image sensor with 0.61 μm pixel. In Proceedings of the Int’l Image Sensor Workshop (IISW), Online, 20–23 September 2021; pp. 5–8. Available online: https://imagesensors.org/Past%20Workshops/2021%20Workshop/2021%20Papers/R02.pdf (accessed on 26 July 2023).
- Im, D.; Kim, J.; Lee, J.; Park, S.; Chang, K.E.; Cho, K.; Chang, C.K.; Oh, K.; Khang, D.; Kim, T.; et al. 0.64 μm-pitch CMOS image sensor with low leakage current of vertical transfer gate. In Proceedings of the Int’l Image Sensor Workshop (IISW), Online, 20–23 September 2021; pp. 9–12. Available online: https://imagesensors.org/Past%20Workshops/2021%20Workshop/2021%20Papers/R03.pdf (accessed on 26 July 2023).
- Park, S.; Lee, C.K.; Park, S.; Park, H.; Lee, T.; Park, D.; Heo, M.; Park, I.; Yeo, H.; Lee, Y.; et al. A 64 Mpixel CMOS image sensor with 0.56 μm unit pixels separated by front deep-trench isolation. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 20–24 February 2022; pp. 108–109. [Google Scholar] [CrossRef]
- Sugimoto, M.; Okawa, T.; Suzuki, K.; Ogita, T.; Nishida, K.; Hiramatsu, K.; Hirano, T.; Kikuchi, Y.; Nishimura, Y.; Takeuchi, K.; et al. High full well capacity and low noise characteristics in 0.6 μm pixels via buried sublocal connections in a 2-layer transistor pixel stacked CMOS image sensor. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 24–27. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R12.pdf (accessed on 13 September 2023).
- Kikuchi, Y.; Tomita, M.; Hayashi, T.; Chiba, H.; Ogita, T.; Okawa, T.; Nishida, K.; Sugimoto, M.; Yoneyama, D.; Umeki, T.; et al. Noise performance improvements of 2-layer transistor pixel stacked CMOS image sensor with non-doped pixel-FinFETs. In Proceedings of the IEEE Symposia on VLSI Technology and Circuits (VLSI), Kyoto, Japan, 11–16 June 2023; pp. T7-4.1–T7-4.2. [Google Scholar] [CrossRef]
- Choi, S.; Lee, S.; Lee, T.; Ji, H.; Park, H.; Im, D.; Lee, D.; Kim, J.; You, S.; Choi, J.; et al. World smallest 200Mp CMOS image sensor with 0.56 μm pixel equipped with novel deep trench isolation structure for better sensitivity and higher CG. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 28–31. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R13.pdf (accessed on 13 September 2023).
- Ai, C.Y.; Watanabe, K.; Lee, S.; Park, G.; Imaizumi, A.; Yeung, K.W.; Tien, S.C.; Tseng, P.H.; Hsiung, A.C.-W.; Grant, L.A. 0.56 μm-pitch CMOS image sensor for high resolution application. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 32–35. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R14.pdf (accessed on 13 September 2023).
- Kwon, M.; Ha, I.; Kim, Y.; Cha, S.; Kaufman, S.; Sharon, O.; Chen, R.; Kim, S.; Kim, K.; Shin, I.; et al. 0.64 μm 200 MP stacked CIS with switchable pixel resolution. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 36–39. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R15.pdf (accessed on 13 September 2023).
- Lee, J.; Yong, E.; Park, J.; Kim, J.; Lee, G.J.; Lee, Y.; Lee, S.; Cha, S.; Yun, J.; Lee, J.; et al. 0.6 μm F-DTI based quad-cell with advanced optic technology for all-pixel PDAF and high sensitivity/SNR performance. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 68–71. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R31.pdf (accessed on 13 September 2023).
- Chao, C.Y.-P.; Tu, H.; Wu, T.; Chou, K.-Y.; Yeh, S.-F.; Hsueh, F.-L. CMOS image sensor random telegraph noise time constant extraction from correlated to uncorrelated double sampling. IEEE J. Electron Devices Soc. 2017, 5, 79–89. [Google Scholar] [CrossRef]
- Chao, C.Y.-P.; Tu, H.; Wu, T.M.-H.; Chou, K.-Y.; Yeh, S.-F.; Yin, C.; Lee, C.-L. Statistical analysis of the random telegraph noise in a 1.1 μm pixel, 8.3 MP CMOS image sensor using on-chip time constant extraction method. Sensors 2017, 17, 2704. [Google Scholar] [CrossRef] [PubMed]
- Chao, C.Y.-P.; Yeh, S.-F.; Wu, M.-H.; Chou, K.-Y.; Tu, H.; Lee, C.-L.; Yin, C.; Paillet, P.; Goiffon, V. Random telegraph noises from the source follower, the photodiode dark current, and the gate-induced sense node leakage in CMOS image sensors. Sensors 2019, 19, 5447. [Google Scholar] [CrossRef] [PubMed]
- Chao, C.Y.-P.; Wu, T.M.-H.; Yeh, S.-F.; Chou, K.-Y.; Tu, H.; Lee, C.-L.; Yin, C.; Paillet, P.; Goiffon, V. Random telegraph noises in CMOS image sensors caused by variable gate-induced sense node leakage due to X-ray irradiation. IEEE J. Electron Devices Soc. 2019, 7, 227–238. [Google Scholar] [CrossRef]
- Chao, C.Y.-P.; Wu, M.-H.; Yeh, S.-F.; Chang, C.-H.; Lee, C.-L.; Chou, K.-Y.; Tu, H. Statistical analysis of random telegraph noises of MOSFET subthreshold currents using a 1M array test chip in a 40 nm process. IEEE J. Electron Devices Soc. 2021, 9, 972–984. [Google Scholar] [CrossRef]
- Chao, C.Y.-P.; Wu, M.-H.; Yeh, S.-F.; Lee, C.-L.; Yin, C.; Tu, H. Hot carrier injection induced random telegraph noise degradation in a 0.8 μm-pitch 8.3Mpixel stacked CMOS image sensor. In Proceedings of the Int’l Image Sensor Workshop (IISW), Crieff, UK, 22–25 May 2023; pp. 44–47. Available online: https://imagesensors.org/Past%20Workshops/2023%20Workshop/2023%20Papers/R21.pdf (accessed on 13 September 2023).
- Gupta, D.C.; Brown, G.A. Gate Dielectric Integrity—Material Process, and Tool Qualification; American Society for Testing and Materials (ASTM): West Conshohoken, PA, USA, 2000. [Google Scholar]
- Dumin, D.J. Oxide Wearout, Breakdown, and Reliability. In Oxide Reliability—A Summary of Silicon Oxide Wearout, Breakdown, and Reliability; Dumin, D.J., Ed.; World Scientific Publishing Company: Singapore, 2002; pp. 1–102. [Google Scholar]
- Graser, T. (Ed.) Hot Carrier Degradation in Semiconductor Devices; Springer International Publishing AG: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Tan, S.; Tahoori, M.; Kim, T.; Wang, S.; Sun, Z.; Kiamehr, S. Chapter 13 Transistor Aging Effects and Reliability—Introduction. In Long-Term Reliability of Nanometer VLSI Systems—Modeling, Analysis and Optimization; Springer Nature Switzerland AG: Cham, Switzerland, 2019; pp. 279–304. [Google Scholar] [CrossRef]
- McPherson, J.W. Chapter 12.7 Hot-Carrier Injection. In Reliability Physics and Engineering—Time-to-Failure Modeling, 3rd ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2019; pp. 207–211. [Google Scholar] [CrossRef]
- El-Kareh, B.; Hutter, L.N. Chapter 11 Chip Reliability. In Silicon Analog Components—Device Design, Process Integration, Characterization, and Reliability, 2nd ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2020; pp. 539–620. [Google Scholar] [CrossRef]
- Rossi, D. Chapter 2 The Effects of Ageing on the Reliability and Performance of Integrated Circuits. In Ageing of Integrated Circuits—Causes, Effects and Mitigation Techniques; Halak, B., Ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2020; pp. 35–64. [Google Scholar] [CrossRef]
- Ota, K.; Saitoh, M.; Tanaka, C.; Matsushita, D.; Numata, T. Systematic study of RTN in nanowire transistor and enhanced RTN by hot carrier injection and negative bias temperature instability. In Proceedings of the IEEE VLSI Symposia on Technology and Circuits (VLSI), Honolulu, HI, USA, 9–13 June 2014; pp. 162–163. [Google Scholar] [CrossRef]
- Manut, A.B.; Zhang, J.F.; Duan, M.; Ji, Z.; Zhang, W.D.; Kaczer, B.; Schram, T.; Horiguchi, N.; Groeseneken, G. Impact of hot carrier aging on random telegraph noise and within a device fluctuation. IEEE J. Electron Devices Soc. 2016, 4, 15–21. [Google Scholar] [CrossRef]
- Shamsur Rouf, A.S.M.; Çelik-Butler, Z. Channel hot carrier induced volatile oxide traps responsible for random telegraph signals in submicron pMOSFETs. Solid State Electron. 2020, 164, 107745. [Google Scholar] [CrossRef]
- Oproglidis, T.A.; Karatsori, T.A.; Theodorou, C.G.; Tsormpatzoglou, A.; Barraud, S.; Ghibaudo, G.; Dimitriadis, C.A. Impact of hot carrier aging on the 1/f and random telegraph noise of short-channel triple-gate junctionless MOSFETs. IEEE Trans. Device Mater. Reliab. 2021, 21, 348–353. [Google Scholar] [CrossRef]
- Ahmed, T.; Çelik-Butler, Z.; Hou, F.-C.; Tang, S.; Mathur, G. Identification of channel hot carrier stress-induced oxide traps leading to random telegraph signals in pMOSFETs. IEEE Trans. Electron Devices 2021, 68, 713–719. [Google Scholar] [CrossRef]
- Chan, T.Y.; Ko, P.K.; Hu, C. A simple method to characterize substrate currents in MOSFET’s. IEEE Electron Device Lett. 1984, 5, 505–507. [Google Scholar] [CrossRef]
- Ong, T.-C.; Ko, P.-K.; Hu, C. Hot-carrier current modeling and device degradation in surface-channel p-MOSFET’s. IEEE Trans. Electron Devices 1990, 37, 1658–1666. [Google Scholar] [CrossRef]
- Ng, K.K.; Sze, S.M. Chapter 6, MOSFETs; 6.4.5 Multiplication and Oxide Reliability. In Physics of Semiconductor Devices, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007; pp. 335–339. [Google Scholar]
- Chao, C.Y.-P.; Chang, C.-H.; Mhala, M.; Chou, P.-S.; Tu, H.; Yeh, S.-F.; Chou, K.-Y.; Liu, C.; Hsueh, F.-L. Detection and shielding of photon emission in stacked CIS. In Proceedings of the Int’l Image Sensor Workshop (IISW), Vaals, NL, USA, 8–11 June 2015; pp. 51–54. Available online: https://www.imagesensors.org/Past%20Workshops/2015%20Workshop/2015%20Papers/Sessions/Session_3/3-01_CChao.pdf (accessed on 26 July 2023).
- Restle, P.J.; Weissman, M.B.; Black, R.D. Tests of Gaussian statistical properties of 1/f noise. J. Appl. Phys. 1983, 54, 5844–5847. [Google Scholar] [CrossRef]
- Kirton, M.J.; Uren, M.J. Noise in solid-state microstructures: A new perspective on individual defects, interface states and low-frequency (1/f) noise. Adv. Phys. 1989, 38, 367–468. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stress Time (min) | 0 | 10 | 20 | 50 | 100 | 200 | 400 | 800 | 1600 | (uA) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Y | Y | Y | Y | Y | Y | Y | Y | Y | 0.597 | 1.0 | |
| Y | Y | Y | Y | Y | Y | Y | Y | N | 1.059 | 5.0 | |
| Y | Y | Y | Y | Y | Y | Y | N | N | 1.552 | 25 | |
| Y | Y | Y | Y | Y | Y | N | N | N | 2.897 | 40 | |
| Y | Y | Y | Y | Y | N | N | N | N | 3.789 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chao, C.Y.-P.; Wu, T.M.-H.; Yeh, S.-F.; Lee, C.-L.; Tu, H.; Huang, J.C.-Y.; Chang, C.-H. Random Telegraph Noise Degradation Caused by Hot Carrier Injection in a 0.8 μm-Pitch 8.3Mpixel Stacked CMOS Image Sensor. Sensors 2023, 23, 7959. https://doi.org/10.3390/s23187959
Chao CY-P, Wu TM-H, Yeh S-F, Lee C-L, Tu H, Huang JC-Y, Chang C-H. Random Telegraph Noise Degradation Caused by Hot Carrier Injection in a 0.8 μm-Pitch 8.3Mpixel Stacked CMOS Image Sensor. Sensors. 2023; 23(18):7959. https://doi.org/10.3390/s23187959
Chicago/Turabian StyleChao, Calvin Yi-Ping, Thomas Meng-Hsiu Wu, Shang-Fu Yeh, Chih-Lin Lee, Honyih Tu, Joey Chiao-Yi Huang, and Chin-Hao Chang. 2023. "Random Telegraph Noise Degradation Caused by Hot Carrier Injection in a 0.8 μm-Pitch 8.3Mpixel Stacked CMOS Image Sensor" Sensors 23, no. 18: 7959. https://doi.org/10.3390/s23187959