With the development of science and technology, more and more people in the modern world of today are experiencing so-called “diseases of civilization” [
1]. However, going to a hospital for examination not only costs a lot of time and money, but also increases social costs and burdens family members. It is also difficult for people with limited mobility or with transportation problems, especially those who are elderly, to go to large medical examination centers. In addition, large-scale testing institutions usually do not inform subjects of their test results immediately. If test subjects could perform their own tests in real time, so that conditions and causes were confirmed immediately, it would be beneficial for any subsequent treatment. In 2008, Rojanathanes et al. proposed the application of gold nanotechnology to develop a rapid urine pregnancy test based on a simple process. This is one of the most widely used tests today [
2]. Rapid tests have the advantage of being easy to obtain and use, and ordinary people are able to interpret their results quickly and accurately.
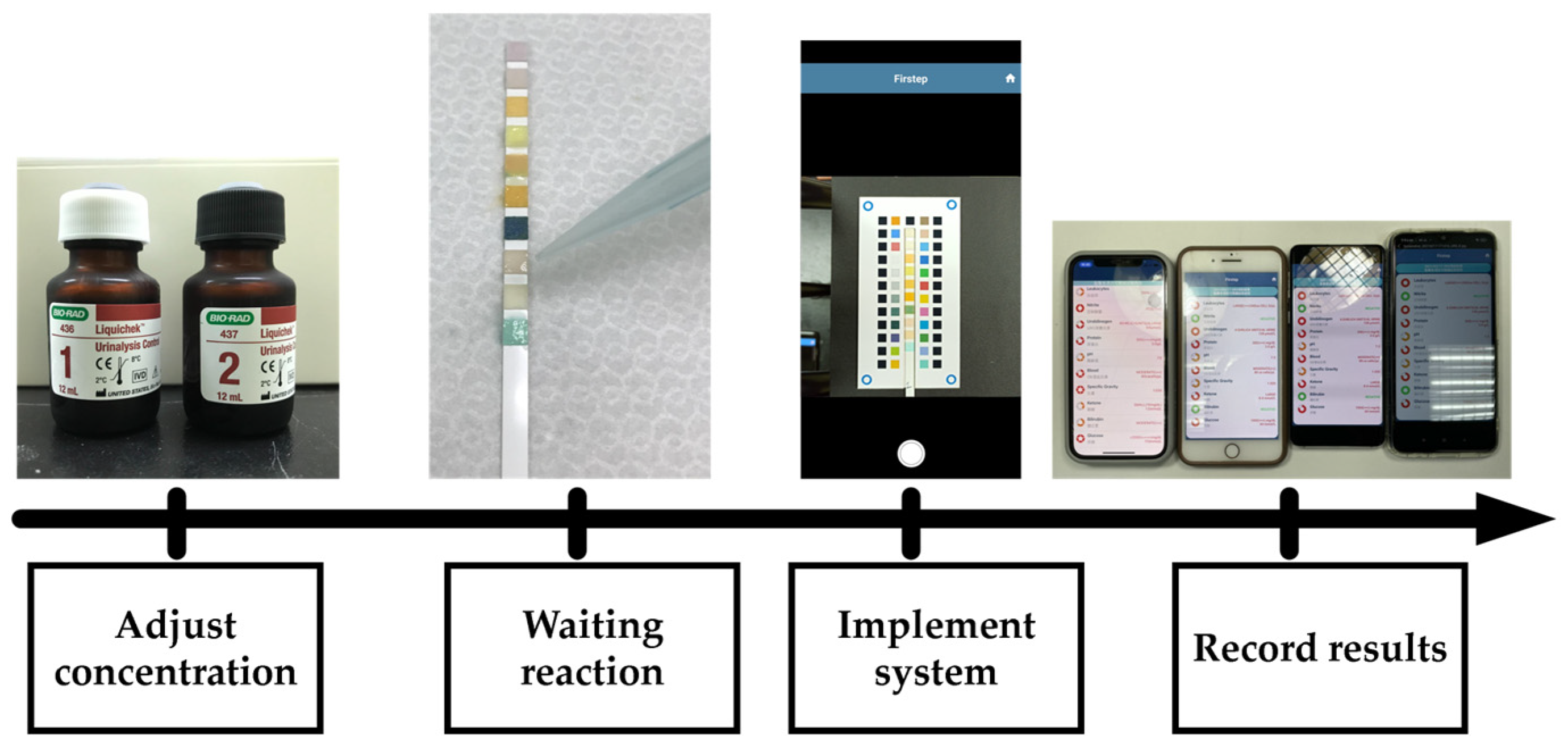
In this study, we used the image-capture function of smartphones to acquire images of rapid urine test strips and compare the colors obtained using a program, to assist ordinary people in interpreting their urine test results. These results were uploaded to the cloud to create a home cloud system.
1.1. Related Works
Urine analysis is often used by doctors when diagnosing diseases. Urine is basically composed of water and solutes. About 91–96% of urine is water [
3], with solutes constituting the remainder. However, the solute composition is very complex. According to the 2011 research of Münch et al., urine solutes can mainly be divided into organic substances, hormones, proteins, drugs, tangible substances, chemical substances, and other trace elements [
4]. In 2000, the advent of 10-parameter urine reagent strips (URS-10), as mentioned in Kutter’s research, greatly improved the previously cumbersome procedures associated with urine testing [
5]. URS-10 are easy to operate, involve a very short period of time, and produce individually relevant test item results whose significance can then be determined.
Although URS-10 are easy to operate and involve a very short period of time, ordinary individuals without specialist training or equipment may not always be able to compare and interpret the colors of test strips with the naked eye, leading to doubts about the accuracy and completeness of any interpretation. Users may misjudge their test results, causing delays in seeking medical attention. Fortunately, due to the popularization of smartphones in recent years, almost all people now possess such a device. Compared with the human eye, it is relatively easy for machine vision to interpret URS-10 test results. In the field of machine vision, color space refers to a way of describing the numerical value of color. It is also a different way of expressing color. For example, in the printing field, the color space is converted to the CMYK color space before printing takes place [
6]. Among color spaces, the most well-known one is RGB, which is widely used in displays and optical instruments [
7]. In 1978, Smith proposed the concept of the HSV color space [
8] which is composed of hue, saturation, and value. In 2015, Chernov et al. reported experimental results which demonstrated that HSV was more accurate than the RGB color space, and that it was close to human vision [
9]. Also in 2015, Raja et al. reported that the HSV color space was more favorable than RGB for the analysis of scenes with complex light changes [
10].
Color calibration is also called color restoration, and there are many ways to achieve the corrections desired when using this technique. The first color calibration card (ColorChecker) was issued by Macbeth in 1976, and it is now an indispensable form of technology in the photography, film, and television industries [
11]. Using ColorChecker, correction is achieved by extracting the RGB values of 24 colors from a photographic image taken with the color calibration card. The color of the image is then restored by calculating the differences between the RGB values of the image and the reference data. In 1996, Chang et al. proposed that most RGB errors were caused by the uneven illumination of images [
12]. In the present study, because images were acquired using a smartphone, it was appropriate to use the concept of a color calibration card for color calibration purposes.
Cloud computing is the model for all current computing methods. Its various applications enable many everyday tasks to be carried out more quickly and effectively, with closer relation to the specific needs of individual users. For example, in 2014, Durresi et al. proposed an architecture combining cloud computing and real-time advertising on smartphones [
13]. In addition, and as mentioned in a study by Hansen et al., many large enterprises such as Microsoft and Google now regard cloud servers as an alternative form of data center which is both viable and affordable [
14].
As the smartphone has become an important tool for human beings worldwide, many researchers have sought to develop detection systems based on smartphone technology in recent studies. The relevant studies include research conducted by Ra et al. in 2017 on urine analysis [
15]. This study transformed subjects into the RGB color space, CIELAB color space, and HSV color space, calculating the closest distance among them to determine the detection target. In 2019, Wang et al. proposed a mobile application for urine protein detection [
16], which directly extracted hue values from images for comparison. A 2022 study by Kibria et al. involved the calculation of distance by matching the RGB values of the target in images with reference RGB values [
17]. All of these studies revolve around the use of smartphones for urine rapid test interpretation.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}