
On the Angular Control of Rotating Lasers by Means of Line Calculus on Hyperboloids




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- In spite of the conceptual simplicity of our method, based on the knowledge of the laser lines corresponding to angle pairs of the rotating mirrors and passing by all the intrinsics and extrinsics of the sensor, we have to measure these 3D laser lines somehow. More precisely, we need a reliable range sensor to determine the 3D coordinates of several laser dots corresponding to some laser line.
- Furthermore, even if we have the means to accomplish the measurement requirement in the previous item, the robustness of the proposed method is only guaranteed up to a certain noise threshold, as quantified in Section 8. Once this threshold is exceeded, the described algorithm in the Appendix A for fitting hyperboloids of revolution to noisy lines might result into an over-idealized model. In these cases, the method of [14] is preferred. This is due to the fact that a Gaussian process can be seen as a universal smoother, filtering out noise.
- Our model presents lasers as perfect lines and the mirrors as mathematical planes, containing the axis of rotation, and enabling perfect reflections. If the deficiencies of the generated laser or the reflecting mirrors imply a significant deviation from the mathematical assumptions, the method of [14] appears to perform better than the proposed method, since the trained Gaussian processes take the sensor defects into account.
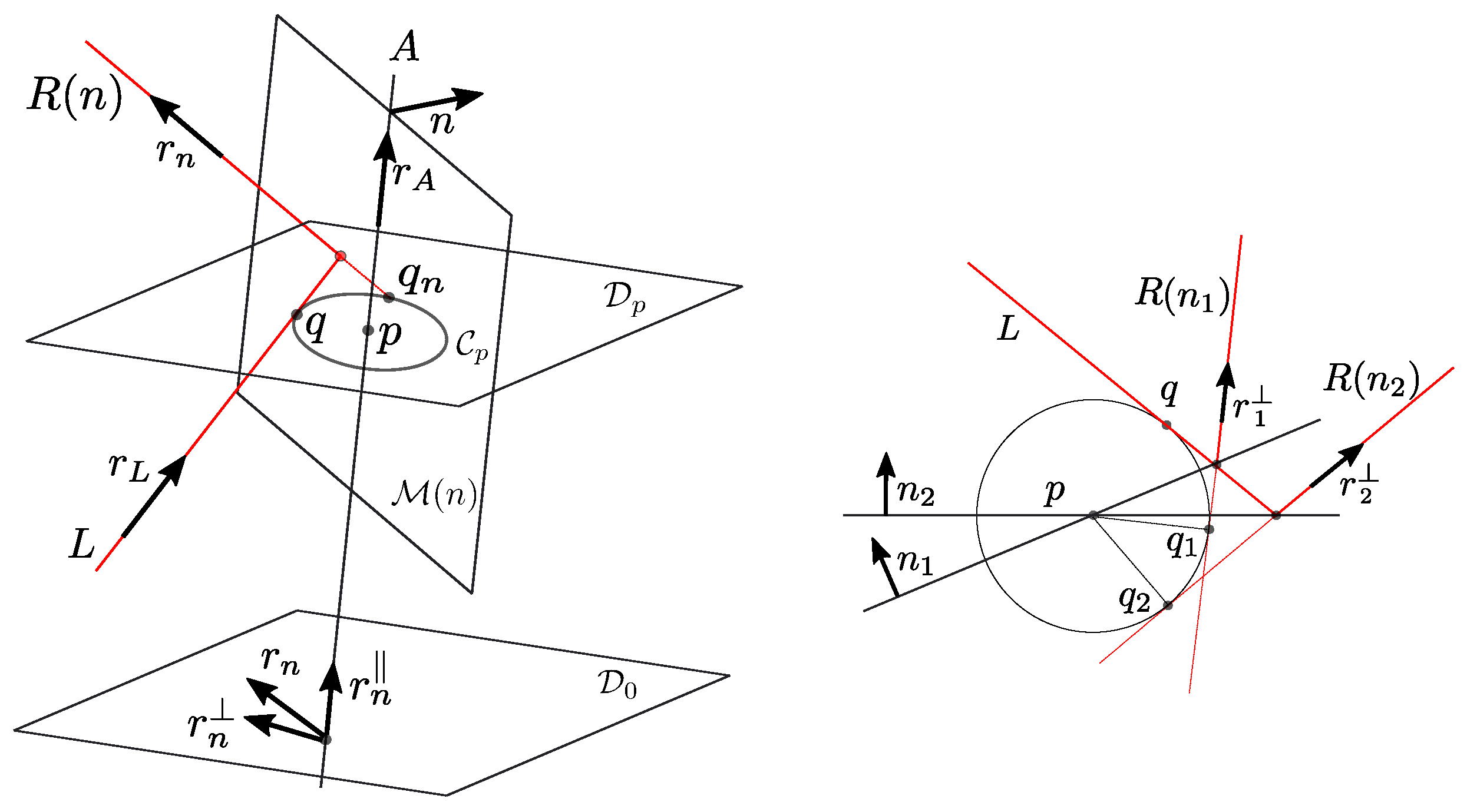
2. Line Reflections by Rotating Mirrors
- 1.
- .
- 2.
- , and L cross A at equal distance, sharing a common closest point p on A. So, if denotes the plane through p and perpendicular to A, then p is the center of a circle in , intersecting L, and in q, , and , respectively. Furthermore:
- 1.
- A system of co-axial hyperboloids, each of them determined by lines with constant .
- 2.
- A system of hyperboloids with each of them determined by lines with constant .
3. Plücker Coordinates of Reflections of a Single Laser by a Rotating Mirror
4. Affine Combination of Cocircular Points
- Containing the points
- Containing the direction projections
- Containing the moment projections
5. Affine Combination of Reflected Lines of a Single Laser by a Rotating Mirror
6. Data-Driven Calibration of Rotating Laser Reflections
| input: relative angles for three mirror positions , and the coordinates of the corresponding laser reflections: . query: , or rather for some . output: . |
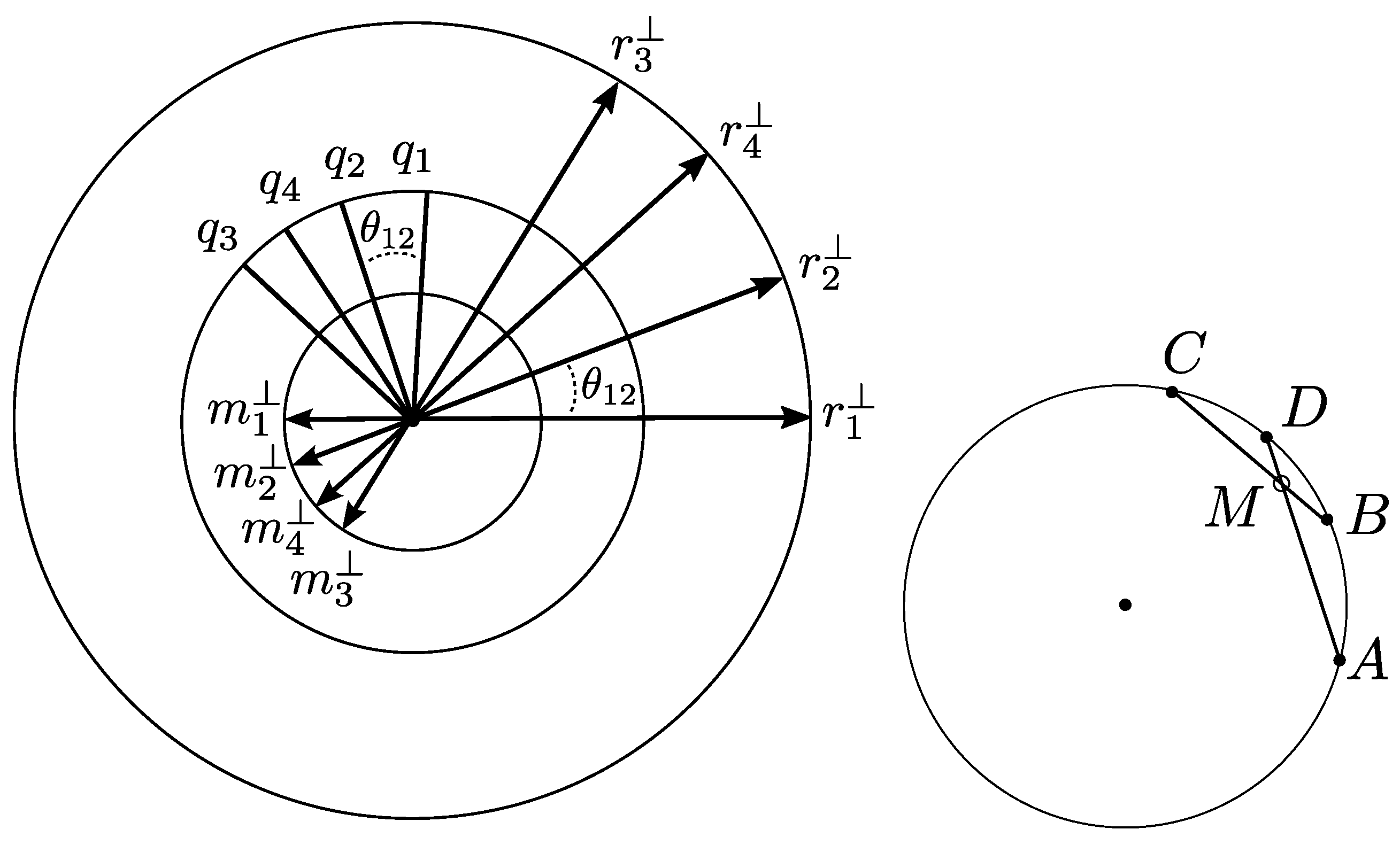
- Transform the mirror positions to rotation angles of the reflected lines:
- Compute T and N as stated in Theorem 3 (Equation (15)). This can be completed by representing the three base angles and the fourth query angle on a (unit) circle, or directly in terms of and .
- Return .
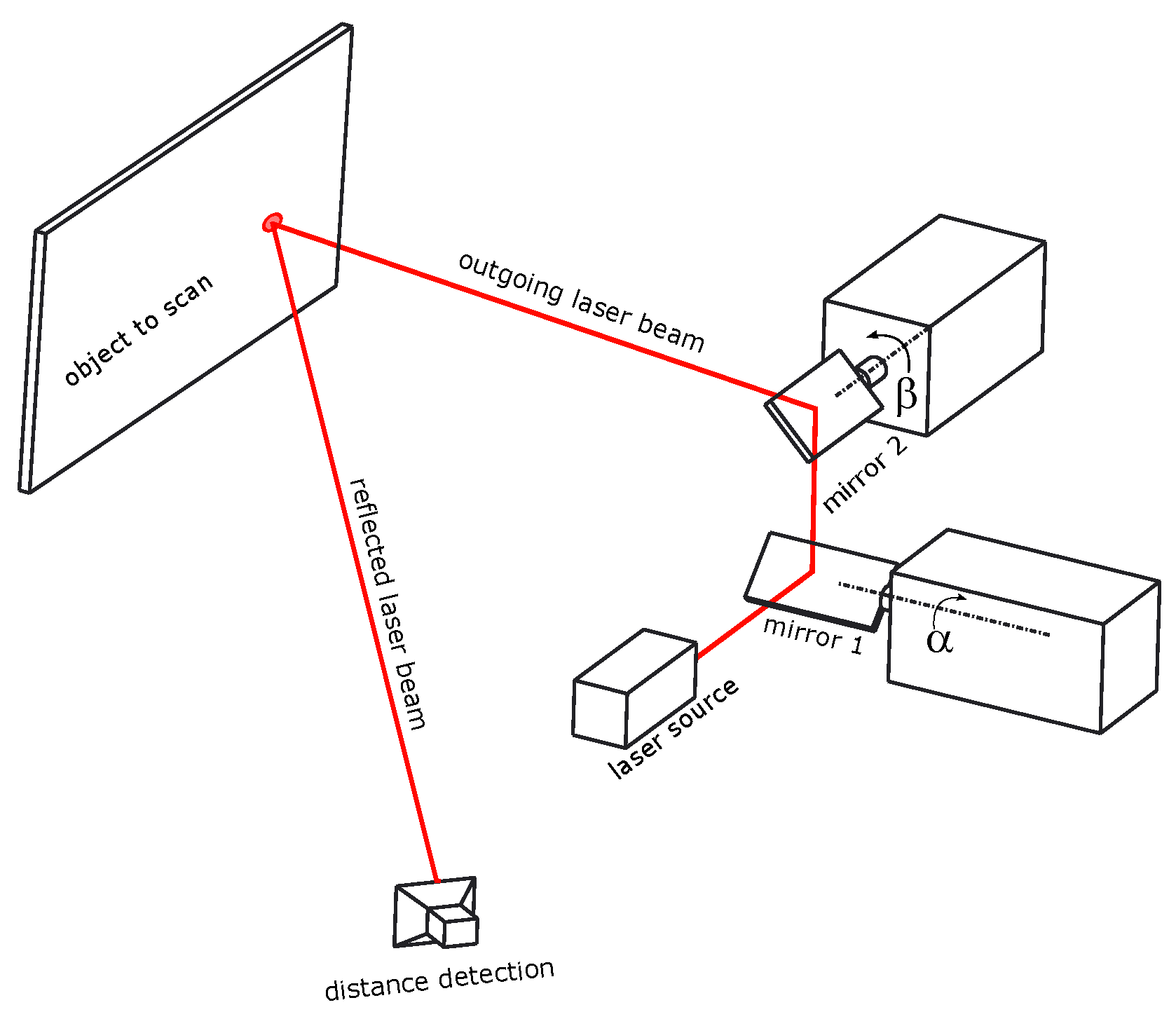
- When this algorithm is applied in a real world situation, we assume only small deviations from the mathematical conditions, the laser beam is always kept fixed, the rotation axis for the mirror is always kept fixed, the mirror shape is close to a plane, the mirror reflection is close to perfect, not damaged by scratches and holes.
- The first step of the algorithm may be more involved in certain practical situations. Indeed, the control of the rotating mirror is performed by user parameters that are not necessarily equal to the geometric angles between the . For instance, the mirror rotation might be galvanic driven, requiring input control in volts. The transformation from voltages to geometric angles might or might not be linear. Even if the user is allowed to use angular values for the input parameters, they are not necessarily identical to the geometric angles due to system noise. In this case, we obtain the angles directly from the measured reflection lines, . The transformation can be obtained by analytic or probabilistic interpolation.
- For the computation of the parameter t it is recommended to permute in Theorem 3 if needed, such that the chords and intersect inside the circle, . This guarantees that and significantly improves the stability.
7. The 3 by 3 Line Grid Calibration of a 2M-GLS
8. Experiments
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Fitting a One-Sheeted Hyperboloid of Revolution to Given Noisy Rulers
References
- Sturm, P.; Ramalingam, S.; Tardif, J.P.; Gasparini, S.; Barreto, J. Camera Models and Fundamental Concepts Used in Geometric Computer Vision. In Foundations and Trends in Computer Graphics and Vision; Now Publishers Inc.: Hanover, MA, USA, 2011; Volume 6, pp. 1–183. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Lu, Y.; Payandeh, S. On the sensitivity analysis of camera calibration from images of spheres. Comput. Vis. Image Underst. 2010, 114, 8–20. [Google Scholar] [CrossRef]
- Lai, J.Z.C. On the sensitivity of camera calibration. Image Vis. Comput. 1993, 11, 656–664. [Google Scholar]
- Van Hamme, D. Robust Ego-Localization Using Monocular Visual Odometry. Ph.D. Thesis, Ghent University, Gent, Belgium, 2016. [Google Scholar]
- Schöps, T.; Larsson, V.; Pollefeys, M.; Sattler, T. Why Having 10,000 Parameters in Your Camera Model is Better Than Twelve. arXiv 2019, arXiv:1912.02908. [Google Scholar]
- Dimitrievski, M.; Van Hamme, D.; Jacobs, L.; Veelaert, P.; Steendam, H.; Philips, W. Tracking Road Users by Cooperative Fusion of Radar and Camera Sensors. In Proceedings of the 2019 IEEE Symposium on Communications and Vehicular Technology (SCVT) (SCVT’19), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Peternell, M.; Pottmann, H. Interpolating Functions on Lines in 3-Space. In Proceedings of the Proceedings vol. 2, Curve and Surface Fitting, Saint-Malo, France, 1–7 July 1999; pp. 351–358. [Google Scholar]
- Cao, H.; Gu, X.; Wei, X.; Yu, T.; Zhang, H. Lookup Table Approach for Radiometric Calibration of Miniaturized Multispectral Camera Mounted on an Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 4012. [Google Scholar] [CrossRef]
- Roitsch, T.; Cabrera-Bosquet, L.; Fournier, A.; Ghamkhar, K.; Jiménez-Berni, J.; Pinto, F.; Ober, E.S. Review: New sensors and data-driven approaches—A path to next generation phenomics. Plant Sci. 2019, 282, 2–10. [Google Scholar] [CrossRef] [PubMed]
- Wissel, T.; Wagner, B.; Stüber, P.; Schweikard, A.; Ernst, F. Data-Driven Learning for Calibrating Galvanometric Laser Scanners. IEEE Sens. J. 2015, 15, 5709–5717. [Google Scholar] [CrossRef]
- Sagan, V.; Maimaitijiang, M.; Paheding, S.; Bhadra, S.; Gosselin, N.; Burnette, M.; Demieville, J.; Hartling, S.; LeBauer, D.; Newcomb, M.; et al. Data-Driven Artificial Intelligence for Calibration of Hyperspectral Big Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–20. [Google Scholar] [CrossRef]
- Mallasto, A.; Feragen, A. Wrapped Gaussian Process Regression on Riemannian Manifolds. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5580–5588. [Google Scholar]
- Boi, I.D.; Sels, S.; De Moor, O.; Vanlanduit, S.; Penne, R. Input and Output Manifold Constrained Gaussian Process Regression for Galvanometric Setup Calibration. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Grossberg, M.; Nayar, S. The Raxel Imaging Model and Ray-Based Calibration. Int. J. Comput. Vis. 2005, 2, 119–137. [Google Scholar] [CrossRef]
- Ye, J.; Yu, J. Ray geometry in non-pinhole cameras: A survey. Vis. Comput. 2014, 30, 93–112. [Google Scholar] [CrossRef] [Green Version]
- Ponce, J.; Sturmfels, B.; Trager, M. Congruences and concurrent lines in multi-view geometry. Adv. Appl. Math. 2017, 88, 62–91. [Google Scholar] [CrossRef] [Green Version]
- Breiding, P.; Kalisnik, S.; Sturmfels, B.; Weinstein, M. Learning algebraic varieties from samples. Rev. Mat. Complut. 2018, 31, 545–593. [Google Scholar] [CrossRef] [Green Version]
- Fischler, M.; Bolles, R. Random sampling consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–385. [Google Scholar] [CrossRef]
- Sels, S.; Bogaerts, B.; Vanlanduit, S.; Penne, R. Extrinsic Calibration of a Laser Galvanometric Setup and a Range Camera. Sensors 2018, 18, 1478. [Google Scholar] [CrossRef] [Green Version]
- Fusiello, A.; Crosilla, F.; Malapelle, F. Procrustean Point-Line Registration and the NPnP Problem. In Proceedings of the 2015 International Conference on 3D Vision, Lyon, France, 19–22 October 2015; pp. 250–255. [Google Scholar]
- Miraldo, P.; Araujo, H. A Simple and Robust Solution to the Minimal General Pose Estimation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2119–2125. [Google Scholar]
- Miraldo, P.; Araujo, H. Pose Estimation for Non-Central Cameras Using Planes. J. Intell. Robot. Syst. 2015, 80, 595–608. [Google Scholar] [CrossRef]
- Trager, M.; Sturmfels, B.; Canny, J.; Hebert, M.; Ponce, J. General Models for Rational Cameras and the Case of Two-Slit Projections. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2520–2528. [Google Scholar]
- Tu, J.; Zhang, L. Effective Data-Driven Calibration for a Galvanometric Laser Scanning System Using Binocular Stereo Vision. Sensors 2018, 18, 197. [Google Scholar] [CrossRef] [Green Version]
- De Boi, I.; Sels, S.; Penne, R. Semidata-Driven Calibration of Galvanometric Setups Using Gaussian Processes. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Tas, F.; Gürsoy, O. On the Line Congruences. Int. Electron. J. Geom. 2018, 11, 47–53. [Google Scholar] [CrossRef]
- Stafne, M.; Mitchell, L.; West, R. Positional calibration of galvanometric scanners used in laser Doppler vibrometers. Measurement 2000, 28, 47–59. [Google Scholar] [CrossRef]
- Duma, V.F.; Duma, M.A. Optomechanical Analysis and Design of Polygon Mirror-Based Laser Scanners. Appl. Sci. 2022, 12, 5592. [Google Scholar] [CrossRef]
- Li, Y. Beam deflection and scanning by two-mirror and two-axis systems of different architectures: A unified approach. Appl. Opt. 2008, 47, 5976–5985. [Google Scholar] [CrossRef] [PubMed]
- Pokorny, P. One-mirror and two-mirror three-dimensional optical scanners—Position and accuracy of laser beam spot. Appl. Opt. 2014, 53, 2730–2740. [Google Scholar] [CrossRef] [PubMed]
- Li, Y. Ruled surfaces generated by gimbaled mirrors: II. A comparative study of gimbaled mirrors with the dual axis galvanometric scanners for XY scanning. J. Opt. Soc. Am. A 2022, 39, 189–197. [Google Scholar] [CrossRef]
- Mao, Y.; Zeng, L.; Jun, J.; Yu, C. Plane-constraint-based calibration method for a galvanometric laser scanner. Adv. Mech. Eng. 2018, 10, 168781401877367. [Google Scholar] [CrossRef] [Green Version]
- Manakov, A.; Seidel, H.P.; Ihrke, I. A Mathematical Model and Calibration Procedure for Galvanometric Laser Scanning Systems. In Proceedings of the VMV 2011—Vision, Modeling and Visualization, Berlin, Germany, 4–6 October 2011; pp. 207–214. [Google Scholar]
- Cui, S.; Zhu, X.; Wang, W.; Xie, Y. Calibration of a laser galvanometric scanning system by adapting a camera model. Appl. Opt. 2009, 48, 2632–2637. [Google Scholar] [CrossRef]
- Odehnal, B.; Stachel, H.; Glaeser, G. The Universe of Quadrics; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Pottmann, H.; Wallner, J. Computational Line Geometry; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Pottmann, H.; Peternell, M.; Ravani, B. An introduction to line geometry with applications. Comput. Aided Des. 1999, 31, 3–16. [Google Scholar] [CrossRef]
- Volenec, V. Circles in barycentric coordinates. Math. Commun. 2004, 9, 79–89. [Google Scholar]
- Lesueur, V.; Nozick, V. Least Square for Grassmann-Cayley Algebra in Homogeneous Coordinates. In Proceedings of the Image and Video Technology—PSIVT 2013 Workshops, Guanajuato, Mexico, 28 October–1 November 2013; Huang, F., Sugimoto, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 133–144. [Google Scholar]
- Rasmussen, C. Gaussian Processes in Machine Learning. In Proceedings of the Advanced Lectures on Machine Learning: ML Summer Schools 2003, Canberra, Australia, 4–16 August 2003; Bousquet, O., von Luxburg, U., Rätsch, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 63–71. [Google Scholar]
- Pottmann, H.; Randrup, T. Rotational and Helical Surface Approximation for Reverse Engineering. Computing 1998, 60, 307–322. [Google Scholar] [CrossRef]
- Hofer, M.; Odehnal, B.; Pottmann, H.; Steiner, T.; Wallner, J. 3D shape recognition and reconstruction based on line element geometry. In Proceedings of the Tenth IEEE International Conference on Computer Vision, Beijing, China, 17–21 October 2005; Volume 2, pp. 1532–1538. [Google Scholar]
- Pottmann, H.; Wallner, J. Approximation algorithms for developable surfaces. Comput. Aided Geom. Des. 1999, 16, 539–556. [Google Scholar] [CrossRef]
- Torr, P.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef] [Green Version]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Penne, R.; De Boi, I.; Vanlanduit, S. On the Angular Control of Rotating Lasers by Means of Line Calculus on Hyperboloids. Sensors 2023, 23, 6126. https://doi.org/10.3390/s23136126
Penne R, De Boi I, Vanlanduit S. On the Angular Control of Rotating Lasers by Means of Line Calculus on Hyperboloids. Sensors. 2023; 23(13):6126. https://doi.org/10.3390/s23136126
Chicago/Turabian StylePenne, Rudi, Ivan De Boi, and Steve Vanlanduit. 2023. "On the Angular Control of Rotating Lasers by Means of Line Calculus on Hyperboloids" Sensors 23, no. 13: 6126. https://doi.org/10.3390/s23136126