

Image-Processing-Based Subway Tunnel Crack Detection System
Abstract
:1. Introduction
2. Related Work
3. Related Algorithms Based on Image Processing
3.1. Subway Crack Detection Method and System Design
- (1)
- Analysis of traditional manual detection and automated detection methods
- (2)
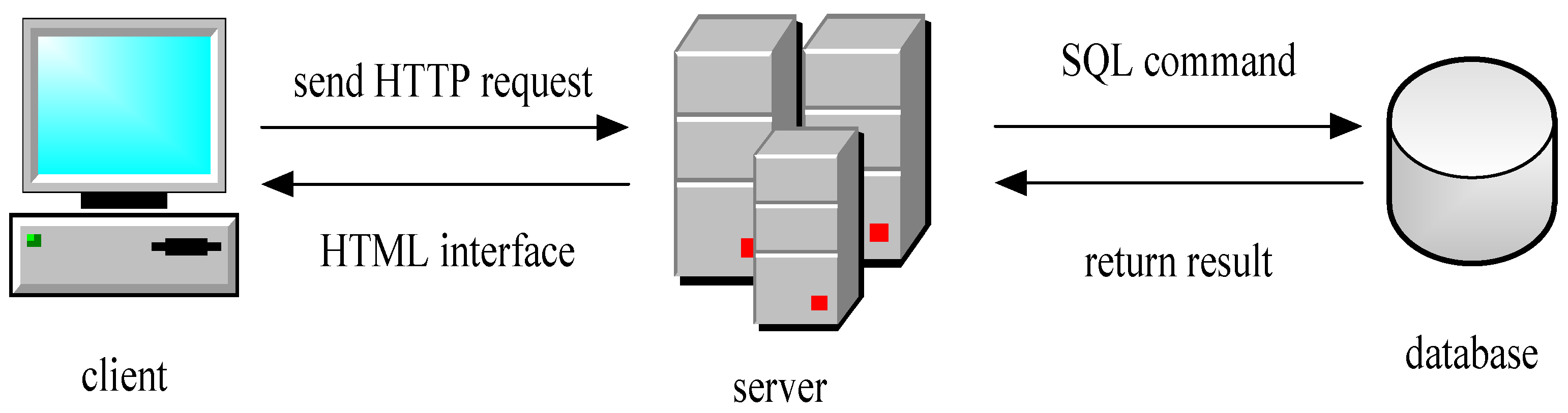
- Overall design scheme of the detection system
3.2. Tunnel Crack Image Detection Algorithm
- (1)
- Image preprocessing algorithm
- (2)
- Image multilevel feature analysis algorithm
- (3)
- Circumscribed rectangle image extraction of feature texture connected area
3.3. Algorithm Design of Tunnel Crack Identification and Feature Detection
- (1)
- Tunnel complex image target detection algorithm
- (2)
- Image classification and recognition algorithm for tunnel cracks
3.4. Selection of Model Building Environment and Hardware Equipment
- (1)
- Selection of model building environment
- (2)
- Selection of hardware equipment
4. Crack Detection Experiment Based on Image Processing
4.1. Image Grayscale Transformation Experiment
4.2. Image Target Detection Experiment
4.3. Experimental Results of Image Classification and Recognition
5. Conclusions
- (1)
- With the aim of identifying complex crack images in subway tunnels, a deep-learning-based SSD deep convolutional neural network method was proposed.
- (2)
- In the experiment, original images and linear-stretched effect maps, as well as the horizontal and vertical projection results, of transverse cracks, longitudinal cracks, and oblique cracks, were compared. In order to verify the application of this method in subway tunnels, an SVM-based classification and identification method was adopted.
- (3)
- Experiments show that the method combining image processing and deep learning has better performance than the SVM-based classification and recognition method.
- (4)
- There are still several issues that need to be resolved because of the complicated internal environment of subway tunnels, the numerous interference elements, and the constrained number of image samples. Therefore, the algorithm still needs to be optimized and improved, and the scientific basis and rigor of the experiment should be strengthened in future work.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, H.; Deng, H.; Zhao, Y.; Chang, X.; Yi, H. Study on the Disturbance of Existing Subway Tunnels by Foundation Sloping Excavation. Appl. Sci. 2023, 13, 948. [Google Scholar] [CrossRef]
- Ding, X.; Huang, Q.; Zhu, H.; Hu, H.; Liu, Z. Subway Tunnel Disease Associations Mining Based on Fault Tree Analysis Algorithm. Math. Probl. Eng. 2017, 2017, 2621493. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Zhang, Z.; Qi, D.; Lu, Y. Automatic Crack Detection and Classification Method for Subway Tunnel Safety Monitoring. Sensors 2014, 14, 19307–19328. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, L.; Wang, Y.; Yu, Z. A crack detection system of subway tunnel based on image processing. Meas. Control. 2022, 55, 164–177. [Google Scholar] [CrossRef]
- Lezwijn, S.; Reitsma, T.; DeKok, P. Tunnel safety management in the Netherlands. In Proceedings of the 11th International Conference on Underground Construction, Prague, Czech Republic, 14–16 June 2010; Volume 2010, pp. 869–875. [Google Scholar]
- Liu, B.; Yang, T.; Xie, Y. Factors influencing bugholes on concrete surface analyzed by image processing technology. Constr. Build. Mater. 2017, 153, 897–907. [Google Scholar] [CrossRef]
- Yang, G.; Wu, J.; Hu, Q. Rapid detection of building cracks based on image processing technology with double square artificial marks. Adv. Struct. Eng. 2019, 22, 1186–1193. [Google Scholar] [CrossRef]
- Yuan, W.; Xue, D. Review of tunnel lining crack detection algorithm based on machine vision. Chin. J. Sci. Instrum. 2017, 38, 3100–3111. [Google Scholar]
- Xue, F.; Zhang, J. True Three Dimensional Dynamic Analysis of Subway Tunnel Structure and Surrounding Soil under Moving Loads. J. China Railw. Soc. 2017, 39, 133–140. [Google Scholar]
- Huang, H.; Yan, S.; Xue, Y.; Fei, W. Inspection equipment study for subway tunnel defects by grey-scale image processing. Adv. Eng. Inform. 2017, 32, 188–201. [Google Scholar] [CrossRef]
- Bao, X.; Xia, Z.; Ye, G.; Fu, Y.; Su, D. Numerical analysis on the seismic behavior of a large metro subway tunnel in liquefiable ground. Tunn. Undergr. Space Technol. 2017, 66, 91–106. [Google Scholar] [CrossRef]
- Lee, H.; Koh, S.Y.; Jun, J.; Yoon, H.T.; Choi, H. Fundamental study on enlargement method of an existing subway tunnels during operation of sidetrack construction. J. Korean Tunn. Undergr. Space Assoc. 2020, 22, 59–76. [Google Scholar]
- Wang, R.; Qi, T.; Hu, S.; Wan, Y. Background Processing of Tunnel Lining Crack Detection and Breakpoint Connection Algorithm. J. Basic Sci. Eng. 2017, 25, 742–750. [Google Scholar]
- Dai, Z. Study on Mechanism of Segment Crack and Fracture of Underlying Shield Tunnel Caused by Extensive Excavation and Unloading of Ground Surface. China Railw. Sci. 2017, 38, 62–69. [Google Scholar]
- Chen, F.C.; Jahanshahi, R. NB-CNN: Deep Learning-based Crack Detection Using Convolutional Neural Network and Naïve Bayes Data Fusion. IEEE Trans. Ind. Electron. 2018, 65, 4392–4400. [Google Scholar] [CrossRef]
- Guo, C.; Yan, J.; Yang, W. Crack detection for a Jeffcott rotor with a transverse crack: An experimental investigation. Mech. Syst. Signal Process. 2017, 83, 260–271. [Google Scholar] [CrossRef]
- Colli, A.; Attenkofer, K.; Raghothamachar, B.; Dudley, M. Synchrotron X-Ray Topography for Encapsulation Stress/Strain and Crack Detection in Crystalline Silicon Modules. IEEE J. Photovolt. 2017, 6, 1387–1389. [Google Scholar] [CrossRef]
- Ye, J.; Zheng, G.; Yin, X.; Saleem, A.; Bo, A. Performance study of millimetre-wave MIMO channel in subway tunnel using directional antennas. IET Microw. Antennas Propag. 2018, 12, 833–839. [Google Scholar]
- Zhang, N.; Lu, Z.; Zhou, D. Influence of train speed and blockage ratio on the smoke characteristics in a subway tunnel. Tunn. Undergr. Space Technol. 2018, 74, 33–40. [Google Scholar] [CrossRef]
- Priyadumkol, J.; Kittichaikarn, C.; Thainimit, S. Crack detection on unwashed eggs using image processing. J. Food Eng. 2017, 209, 76–82. [Google Scholar] [CrossRef]
- Satpute, D.; Baviskar, P.; Gandhi, P.; Chavanke, M.; Aher, T. Crack Detection in Cantilever Shaft Beam Using Natural Frequency. Mater. Today Proc. 2017, 4, 1366–1374. [Google Scholar] [CrossRef]
- Nakamura, T. Recent Revolution in Image Technology for the Wrist. J. Wrist Surg. 2018, 7, 273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sriartha, I.P.; Jampel, I.N.; Widiana, I.W.; Putrajay, I.K. Accuracy of ALOS AVNIR-2 image technology for mapping Oxygen need and Green Open Space priority in Denpasar City, Bali. J. Eng. Appl. Sci. 2018, 13, 3594–3600. [Google Scholar]
- Ren, Z.Q.; Rao, Z.H.; Hai-Yan, J.I. Identification of Different Concentrations Pesticide Residues of Dimethoate on Spinach Leaves by Hyperspectral Image Technology—ScienceDirect. IFAC-Papers 2018, 51, 758–763. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Jing, Z.C.; Juntao, Y.E.; Guo-Liang, X.U. A geometric flow approach for region-based image segmentation theoretical analysis. Acta Math. Appl. Sin. 2018, 34, 65–76. [Google Scholar] [CrossRef]
- Swierczynski, P.; Papie, B.W.; Schnabel, J.A.; Macdonald, C. A level-set approach to joint image segmentation and registration with application to CT lung imaging. Comput. Med. Imaging Graph. 2018, 65, 58–68. [Google Scholar] [CrossRef]
- Zingman, I.; Saupe, D.; Penatti, O.; Lambers, K. Detection of Fragmented Rectangular Enclosures in Very High Resolution Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4580–4593. [Google Scholar] [CrossRef]
- Wang, J.; Lu, W.; Wang, T. A high precision Algorithm for space object detection under starry background based on cascade support vector machine. Sci. Technol. Eng. 2018, 18, 114–119. [Google Scholar]
- Wang, X.; Yang, M.; Zhu, S.; Lin, Y. Regionlets for generic object detection. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 99, 2071–2084. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Images | Number of Cracks | Total | |
|---|---|---|---|
| Training Set | 7130 | 9730 | 16,860 |
| Validation Set | 1020 | 1350 | 2370 |
| Test Set | 1021 | 1296 | 2317 |
| Total | 9171 | 12,376 | 21,547 |
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | |
|---|---|---|---|---|---|
| Confidence Threshold | 1240 | 1126 | 997 | 956 | 878 |
| Crack Detection Rate | 92.96% | 83.65% | 68.13% | 66.25% | 64.38% |
| Raw Image Sample Library | Binary Image Sample Library | Feature Texture Bounding Rectangle | Improved Bounding Rectangle | |
|---|---|---|---|---|
| Alexnet Training Accuracy | 87% | 79.6% | 94.3% | 97.5% |
| Alexnet Test Accuracy | 88.2% | 79.3% | 93% | 96.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Hong, Z.; Shi, W.; Guo, X. Image-Processing-Based Subway Tunnel Crack Detection System. Sensors 2023, 23, 6070. https://doi.org/10.3390/s23136070
Liu X, Hong Z, Shi W, Guo X. Image-Processing-Based Subway Tunnel Crack Detection System. Sensors. 2023; 23(13):6070. https://doi.org/10.3390/s23136070
Chicago/Turabian StyleLiu, Xiaofeng, Zenglin Hong, Wei Shi, and Xiaodan Guo. 2023. "Image-Processing-Based Subway Tunnel Crack Detection System" Sensors 23, no. 13: 6070. https://doi.org/10.3390/s23136070