
Blockchain-Assisted Privacy-Preserving and Context-Aware Trust Management Framework for Secure Communications in VANETs


Abstract
:1. Introduction
- (1)
- First, we propose a blockchain-assisted privacy-preserving and context-aware trust management framework to identify and revoke malicious vehicles and their bogus messages from the vehicular network. The proposed framework consists of two components. The first component is a blockchain-assisted privacy-preserving authentication scheme which serves as the authentication module. The proposed authentication scheme is proposed to enable mutual authentication of vehicles and their messages and meets the security, privacy, and efficiency requirements of VANETs. The other component is a context-aware trust management scheme that consists of several modules and is used to evaluate the trustworthiness of the sender vehicles and their messages and ensure a trusted communication environment under various contexts of VANETs.
- (2)
- Second, we adopt blockchain technology to achieve efficient and distributed authentication and revocation in VANETs. With this approach, vehicles and RSUs within VANETs can verify the authenticity of vehicles’ pseudo-identities efficiently with Proof-of-Presence (PoP) and Proof-of-Absence (PoA) mechanisms.
- (3)
- Finally, we conduct a security analysis to illustrate that our proposed framework satisfies the trust, security, and privacy requirements of VANETs. Furthermore, we conduct an efficiency analysis to show that our authentication scheme is efficient compared to the baseline schemes in terms of low computation cost and communication overhead. Furthermore, we conduct several experiments to show that our trust management framework can identify malicious vehicles and their false/bogus messages in various contexts efficiently, compared to the baseline schemes.
2. Related Works
3. Proposed Trust Management Framework
3.1. Preliminaries
3.2. Adversary Model
- False message attack: False or bogus messages are generated by malicious vehicles to mislead other vehicles or RSUs. These attacks may lead honest drivers to take incorrect actions, such as decelerating, braking, or considering alternate routes. A malicious vehicle may engage in bogus message attacks through collusion (collaborating with other malicious vehicles to carry out the attacks together), non-collusion (carrying out the attack individually), or by on–off patterns (alternating its behavior by sending false messages for some time before switching to sending messages with correct information and vice versa).
- Opinion-alteration attack: An attacker can propagate false trust opinions about other vehicles to make them appear benign or legitimate so the malicious vehicles remain undetected. This attack attempts to disrupt trust evaluation, making it more difficult to identify malicious attackers [36].
3.3. Details of the Proposed Trust Framework
3.3.1. A Blockchain-Assisted Privacy-Preserving Authentication Scheme
- Setup
- Firstly, the TA chooses and as two secure prime numbers, then selects , and generates an elliptic curve based on the equation , where 4 + 27 (mod p) ≠ 0 and point P consists of all the points on , to generate the cyclic group G.
- The AT randomly selects as its secret master key and sets the public key as . The secret master key is kept securely in its repository.
- The TA randomly selects and computes .
- The TA chooses cryptographic hash functions: .
- Finally, the TA publishes: as the system parameters.
- Generation of PseudonymThrough a secure channel, the vehicle provides the TA with its real identity as received from the manufacturer (MVM).The TA randomly chooses and generates a pseudonym as below:The TA computes .
- The TA computes .
- Then, the TA sends the generated pseudonym to the vehicle .
- The TA stores in its database.
- The TA can retrieve the vehicle ’s real identity by computing .
- Generation of Partial Private Key
- The TA randomly chooses .
- The TA computes , and generates the vehicles’ partial private key as: .
- Finally, the TA sends { to the vehicle .
- Generation of Vehicle Key
- As soon as the partial private key is received, the vehicle calculates and checks whether . If this condition is met, the partial private key is valid.
- The vehicle randomly chooses two numbers, , and calculates , , , .
- The vehicle sets its full private key as , and its public key as .
- Generation of RSU KeyThe TA generates the ’s public key and private key by randomly selecting , and assigning the private key as , then calculates the public key as = .
- Generation of SignatureTo ensure message integrity, the vehicle needs to generate its signature on the message before sending it to another vehicle or RSU. To do so, it executes the following steps:
- The vehicle randomly chooses a number and calculates .
- computes , where is the timestamp, and calculates .
- Then, the vehicle sets the signature on message . Finally, the vehicle sends to the receiver/evaluator node for verification.
- Verification of SignatureWhen a message tuple is received, the receiver/evaluator node (vehicle/RSU) checks the signature on the message which has been signed by the sender’s vehicle . The receiver/evaluator node will execute the following steps:
- The receiver/evaluator node (vehicle/RSU) checks whether the timestamps and in the pseudonym and in the received message , respectively, are within acceptable time ranges before validating the message . If one of them is invalid, the receiver/evaluator node aborts; otherwise, proceed to the next step.
- The receiver/evaluator node checks the received against VPID-BC and RPID-BC to be sure of its presence in VPID-BC and absence in RPID-BC. In other words, has been allocated to the vehicle and has not been revoked by TA. The PoP and PoA of the in VPID-BC and RPID-BC are performed efficiently with O(logN) time.
- If the is not revoked, the receiver/evaluator node can carry on with the verification.
- The receiver/evaluator node checks the validity and accuracy of the message generated by vehicle by executing the following steps:
- The receiver/evaluator node calculates and .
- The receiver/evaluator node checks whether . If the equation holds, the message will be accepted. Otherwise, reject.
Proof of Correctness: - Generation of Aggregate SignatureWhen a large number of messages are received from different vehicles , the RSU computes and and outputs the aggregate signature . Multiple signatures are consolidated into one short signature by the RSU. In this way, the computation cost and communication overhead can be reduced.
- Verification of Aggregate Signature
Communication Scenario
3.3.2. A Context-Aware Trust Management Scheme
Context Establishment/Parameter Extraction Module
Trust Computation Module on Vehicle
- A.
- Entity-Centric Trust
- (1)
- Authority vehicles (AV) (such as traffic patrols)—These vehicles are approved by a centralized authority or specific department, and the messages they transmit are highly trusted.
- (2)
- Public services (PS) vehicles (such as buses, road upkeep vehicles, engineering vehicles, sanitation trucks, etc.)—As they have been authorized by specific departments, they are highly trusted.
- (3)
- Ordinary vehicles (OV) (such as private cars, taxis, freight vehicles, etc.)—Individuals primarily control these vehicles.
- B.
- Data-Centric Trust/Event-Based Trust
- C.
- Hybrid Trust/Combined Trust
Trust Calculation Module on the RSU
Decision Module
- When the trust value exceeds or equals a predefined threshold , the sender vehicle is regarded as a “Trusted Vehicle”. The receiver/evaluator node will act upon the received message and broadcast the received trusted messages to other vehicles.
- The sender vehicle will be regarded as a “Malicious Vehicle“ and the received message will be discarded if the trust value is below the threshold ().
- The new trust value of the sender vehicle is stored in the trust database by the evaluator node.
- Malicious vehicles that continue to send false messages will be placed on the revocation list and sent to the TA.
- The TA revokes the pseudonyms of these vehicles and adds the revoked pseudonyms to the RPID-BC.
4. Security Analysis
- (1)
- Source authentication: The VPID-BC and RPID-BC blockchains are adopted by the receiver/evaluator node (vehicle/RSU) to authenticate the sender vehicle by performing the PoP and PoA of the sender’s pseudo-identity .
- (2)
- Message authentication: Our authentication scheme requires that each message a vehicle generates be signed before being sent to another vehicle or RSU. The receiver/evaluator node checks the signature in the received message to make sure that the received message has not been altered by attackers or malicious vehicles during transmission.
- (3)
- Anonymity: The pseudonym created by the TA is used by the vehicle to communicate with other vehicles/RSUs. When communicating, the pseudonym keeps the real identity of the vehicle completely anonymous.
- (4)
- Unlinkability: In our scheme, the sender vehicle transmits to the neighboring vehicle/RSU. Messages from the same vehicle cannot be linked by attackers since the signature contains a random value. Unlinkability is therefore satisfied by the proposed scheme.
- (5)
- Traceability and Revocability: When certain malicious vehicles are reported to the TA by RSUs, the TA can identify their real identity. Only the TA can determine the vehicle’s real identity from its pseudonym. The TA retrieves the vehicle’s real identity by obtaining from its database. The TA revokes the pseudonym of the malicious vehicle and adds the revoked pseudonym to the RPID-BC blockchain.
- (6)
- Nonrepudiation: Due to the TA’s ability to link the pseudonym of a message to its real identity, no vehicle can deny signing a message.
- (7)
- Anti-false message and combined attacks: The proposed framework takes advantage of V2V and V2I communication to detect false/bogus messages or thwart combined attacks. The proposed framework combines information from multiple sources, including beacon and event messages received from neighboring vehicles. This is utilized in order to compute the trustworthiness of the sender vehicle and to accurately detect false/bogus messages received from the sender vehicles due to malicious behavior. Thus, the proposed trust framework enables the receiver nodes to identify malicious vehicles and their false/bogus messages and eliminate them from the network.
- (8)
- Resistance against attacks: Due to the signature, time-stamps, and random values of , our scheme is resistant to message-tampering attacks, replay attacks, and man-in-the-middle attacks.
5. Performance Evaluation
5.1. Efficiency Analysis
5.1.1. Computation Cost
5.1.2. Communication Overhead
5.2. Simulation-Based Analysis
5.2.1. Simulation Setup
5.2.2. Performance Evaluation Metrics
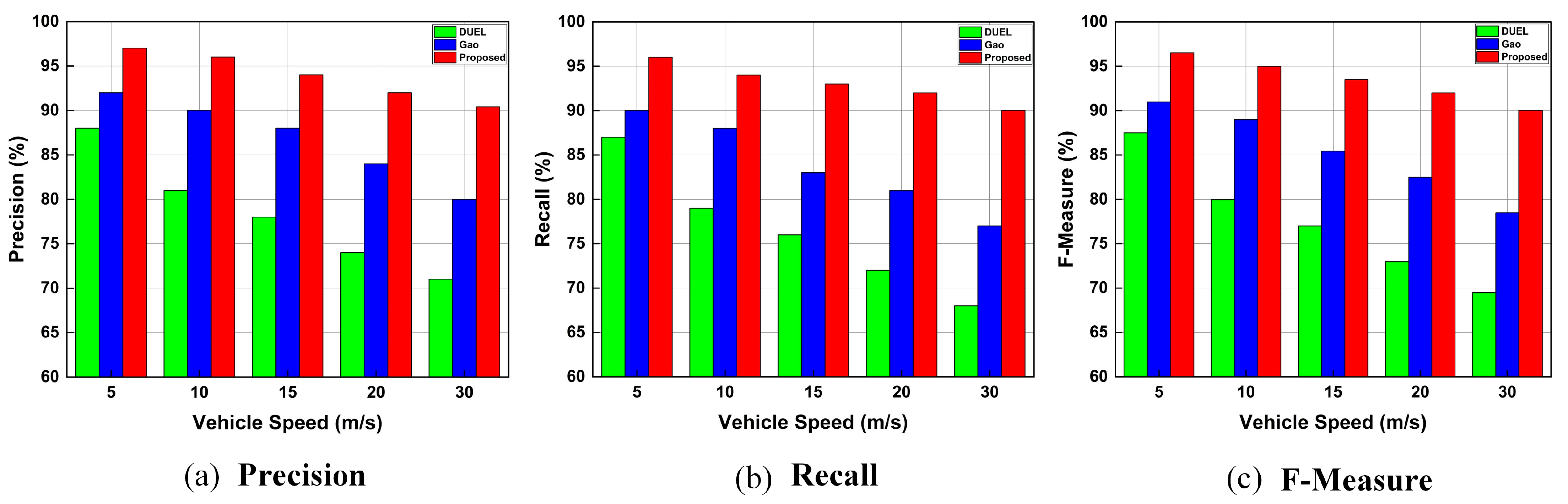
- Precision: Precision is the proportion of the relevant nodes that were successfully identified as malicious vehicles over the total number of nodes that were both correctly and incorrectly identified as malicious vehicles.
- Recall: Recall is the proportion of the number of vehicles correctly classified as malicious over the total number of malicious vehicles.
- F-Measure: F-Measure indicates how accurate the trust scheme is at identifying malicious vehicles and their false messages based on the weighted average of precision and recall. As a result, F-Measure provides a measure for the trust model’s accuracy. The higher the F-Measure, the higher the accuracy of the trust model.
- End-To-End Delay: We measure the latency in terms of end-to-end delay, i.e., the time it takes a message to arrive at the receiver from its sender. End-to-end delay is calculated as below:where is the time a message arrived at its receiver and refers to the time the message was sent from the sender.
5.2.3. Performance Evaluation under Different Contexts
5.2.4. Simulation Results and Discussion
Influence of Vehicle Density on Trust Schemes
Influence of Vehicle Speed on Trust Schemes
Influence of Different Percentages of Malicious Vehicles
End-to-End Delay
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Global Status Report on Road Safety. Available online: https://www.who.int/publications/i/item/9789241565684 (accessed on 11 October 2021).
- Matthias, S. Does Traffic Congestion Slow the Economy? J. Plan. Lit. 2011, 26, 391–404. [Google Scholar] [CrossRef]
- Williams, B.M.; Guin, A. Traffic Management Center Use of Incident Detection Algorithms: Findings of a Nationwide Survey. IEEE Trans. Intell. Transp. Syst. 2007, 8, 351–358. [Google Scholar] [CrossRef]
- Yang, X.; Liu, J.; Zhao, F.; Vaidya, N.H. A vehicle-to-vehicle communication protocol for cooperative collision warning. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, MOBIQUITOUS 2004, Boston, MA, USA, 26–26 August 2004; pp. 114–123. [Google Scholar]
- Phull, N.; Singh, P.; Shabaz, M.; Sammy, F. Enhancing Vehicular Ad Hoc Networks’ Dynamic Behavior by Integrating Game Theory and Machine Learning Techniques for Reliable and Stable Routing. Secur. Commun. Netw. 2022, 2022, 4108231. [Google Scholar] [CrossRef]
- Van Der Heijden, R.W.; Dietzel, S.; Leinmüller, T.; Kargl, F. Survey on misbehavior detection in cooperative intelligent transportation systems. IEEE Commun. Surv. Tutor. 2019, 21, 779–811. [Google Scholar] [CrossRef] [Green Version]
- Akwirry, B.; Bessis, N.; Malik, H.; McHale, S. A Multi-Tier Trust-Based Security Mechanism for Vehicular Ad-Hoc Network Communications. Sensors 2022, 22, 8285. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Soomro, I.A.; Hasbullah, H.; Manan, J.B.A. User requirements model for vehicular Ad hoc network applications. In Proceedings of the 2010 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 15–17 June 2010; Volume 2, pp. 800–804. [Google Scholar] [CrossRef]
- Fan, N.; Wu, C.Q. On trust models for communication security in vehicular ad-hoc networks. Ad Hoc Netw. 2018, 90, 101740. [Google Scholar] [CrossRef]
- Sumithra, S.; Vadivel, R. An Overview of Various Trust Models for VANET Security Establishment. In Proceedings of the 2018 9th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Bengaluru India, 10–12 July 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Azam, F.; Yadav, S.K.; Priyadarshi, N.; Padmanaban, S.; Bansal, R.C. A Comprehensive Review of Authentication Schemes in Vehicular Ad-Hoc Network. IEEE Access 2021, 9, 31309–31321. [Google Scholar] [CrossRef]
- Huang, Z.; Ruj, S.; Cavenaghi, M.A.; Stojmenovic, M.; Nayak, A. A social network approach to trust management in VANETs. Peer Peer Netw. Appl. 2014, 7, 229–242. [Google Scholar] [CrossRef]
- Rawat, D.B.; Yan, G.; Bista, B.B.; Weigle, M.C. Trust On the Security of Wireless Vehicular Ad-hoc Networking. Ad Hoc Sens. Wirel. Netw. 2015, 24, 1–23. [Google Scholar]
- Gazdar, T.; Belghith, A.; Abutair, H. An Enhanced Distributed Trust Computing Protocol for VANETs. IEEE Access 2018, 6, 380–392. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, S.S.; Li, Y.; Pan, Z.K.; Peng, X.; Cheng, X.Z. An Attack-Resistant Trust Inference Model for Securing Routing in Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2019, 68, 7108–7120. [Google Scholar] [CrossRef]
- Siddiqui, S.A.; Mahmood, A.; Sheng, Q.Z.; Suzuki, H.; Ni, W. A Time-aware Trust Management Heuristic for the Internet of Vehicles. In Proceedings of the 2021 IEEE 20th International Conference on Trust, Security and Privacy in Computing and Communications (TrustCom), Shenyang, China, 20–22 October 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Iqbal, R.; Butt, T.A.; Afzaal, M.; Salah, K. Trust management in social Internet of vehicles: Factors, challenges, blockchain, and fog solutions. Int. J. Distrib. Sens. Networks 2019, 15, 155014771982582. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Cheng, X.; Li, J.; He, Y.; Xiao, K. A survey: Applications of blockchain in the Internet of Vehicles. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 77. [Google Scholar] [CrossRef]
- Grover, J. Security of Vehicular Ad Hoc Networks using blockchain: A comprehensive review. Veh. Commun. 2022, 34, 100458. [Google Scholar] [CrossRef]
- Dwivedi, S.K.; Amin, R.; Das, A.K.; Leung, M.T.; Choo, K.-K.R.; Vollala, S. Blockchain-based vehicular ad-hoc networks: A comprehensive survey. Ad Hoc Netw. 2022, 137, 102980. [Google Scholar] [CrossRef]
- Liu, Z.; Ma, J.; Weng, J.; Huang, F.; Wu, Y.; Wei, L.; Li, Y. LPPTE: A lightweight privacy-preserving trust evaluation scheme for facilitating distributed data fusion in cooperative vehicular safety applications. Inf. Fusion 2020, 73, 144–156. [Google Scholar] [CrossRef]
- Liu, Z.; Weng, J.; Guo, J.; Ma, J.; Huang, F.; Sun, H.; Cheng, Y. PPTM: A Privacy-Preserving Trust Management Scheme for Emergency Message Dissemination in Space–Air–Ground-Integrated Vehicular Networks. IEEE Internet Things J. 2022, 9, 5943–5956. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.; Liu, Z.; Ma, J.; Yang, C.; Zhang, J.; Wu, D. TROVE: A Context-Awareness Trust Model for VANETs Using Reinforcement Learning. IEEE Internet Things J. 2020, 7, 6647–6662. [Google Scholar] [CrossRef]
- Gao, H.; Liu, C.; Yin, Y.; Xu, Y.; Li, Y. A Hybrid Approach to Trust Node Assessment and Management for VANETs Cooperative Data Communication: Historical Interaction Perspective. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16504–16513. [Google Scholar] [CrossRef]
- Bhargava, A.; Verma, S. DUEL: Dempster Uncertainty-Based Enhanced- Trust Level Scheme for VANET. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15079–15090. [Google Scholar] [CrossRef]
- Liu, Z.; Weng, J.; Ma, J.; Guo, J.; Feng, B.; Jiang, Z.; Wei, K. TCEMD: A Trust Cascading-Based Emergency Message Dissemination Model in VANETs. IEEE Internet Things J. 2020, 7, 4028–4048. [Google Scholar] [CrossRef]
- Inedjaren, Y.; Maachaoui, M.; Zeddini, B.; Barbot, J.-P. Blockchain-based distributed management system for trust in VANET. Veh. Commun. 2021, 30, 100350. [Google Scholar] [CrossRef]
- Ghaleb, F.A.; Maarof, M.A.; Zainal, A.; Al-Rimy, B.A.S.; Alsaeedi, A.; Boulila, W. Ensemble-Based Hybrid Context-Aware Misbehavior Detection Model for Vehicular Ad Hoc Network. Remote Sens. 2019, 11, 2852. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, F.; Franqueira, V.N.L.; Adnane, A. TEAM: A Trust Evaluation and Management Framework in Context-Enabled Vehicular Ad-Hoc Networks. IEEE Access 2018, 6, 28643–28660. [Google Scholar] [CrossRef]
- Ghaleb, F.A.; Saeed, F.; Alkhammash, E.H.; Alghamdi, N.S.; Al-Rimy, B.A.S. A Fuzzy-Based Context-Aware Misbehavior Detecting Scheme for Detecting Rogue Nodes in Vehicular Ad Hoc Network. Sensors 2022, 22, 2810. [Google Scholar] [CrossRef]
- Rehman, A.; Hassan, M.F.; Hooi, Y.K.; Qureshi, M.A.; Shukla, S.; Susanto, E.; Rubab, S.; Abdel-Aty, A.-H. CTMF: Context-Aware Trust Management Framework for Internet of Vehicles. IEEE Access 2022, 10, 73685–73701. [Google Scholar] [CrossRef]
- Ghajar, F.G.; Sratakhti, J.S.; Sikora, A. SBTMS: Scalable Blockchain Trust Management System for VANET. Appl. Sci. 2021, 11, 11947. [Google Scholar] [CrossRef]
- Chukwuocha, C.; Thulasiraman, P.; Thulasiram, R.K. Trust and scalable blockchain-based message exchanging scheme on VANET. Peer-to-Peer Netw. Appl. 2021, 14, 3092–3109. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. A security solution for V2V communication within VANETs. In Proceedings of the 2018 Wireless Days (WD), Dubai, United Arab Emirates, 3–5 April 2018; pp. 181–183. [Google Scholar] [CrossRef]
- Wei, Y.-C.; Chen, Y.-M. Efficient Self-organized Trust Management in Location Privacy Enhanced VANETs. In Information Security Applications; WISA 2012; Lecture Notes in Computer Science; Lee, D.H., Yong, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7690, pp. 328–344. [Google Scholar] [CrossRef]
- Kumar, P.; Kumari, S.; Sharma, V.; Li, X.; Sangaiah, A.K.; Islam, S.H. Secure CLS and CL-AS schemes designed for VANETs. J. Supercomput. 2019, 75, 3076–3098. [Google Scholar] [CrossRef]
- Mei, Q.; Xiong, H.; Chen, J.; Yang, M.; Kumari, S.; Khan, M.K. Efficient Certificateless Aggregate Signature with Conditional Privacy Preservation in IoV. IEEE Syst. J. 2021, 15, 245–256. [Google Scholar] [CrossRef]
- Zhao, N.; Zhang, G. Privacy-Protected Certificateless Aggregate Signature Scheme in VANET. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kamil, I.A.; Ogundoyin, S.O. On the security of privacy-preserving authentication scheme with full aggregation in vehicular ad hoc network. Secur. Priv. 2020, 3, 1–20. [Google Scholar] [CrossRef]
- Xu, Z.; He, D.; Kumar, N.; Choo, K.-K.R. Efficient Certificateless Aggregate Signature Scheme for Performing Secure Routing in VANETs. Secur. Commun. Netw. 2020, 2020, 5276813. [Google Scholar] [CrossRef]
- Liu, J.; Li, Q.; Cao, H.; Sun, R.; Du, X.; Guizani, M. MDBV: Monitoring Data Batch Verification for Survivability of Internet of Vehicles. IEEE Access 2018, 6, 50974–50983. [Google Scholar] [CrossRef]
- Wang, H.; Wang, L.; Zhang, K.; Li, J.; Luo, Y. A Conditional Privacy-Preserving Certificateless Aggregate Signature Scheme in the Standard Model for VANETs. IEEE Access 2022, 10, 15605–15618. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, J.; Zhong, H.; Chen, Z.; Liu, L. PA-CRT: Chinese Remainder Theorem Based Conditional Privacy-Preserving Authentication Scheme in Vehicular Ad-Hoc Networks. IEEE Trans. Dependable Secur. Comput. 2021, 18, 722–735. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Luo, M.; Vijayakumar, P.; Peng, C.; He, D. Efficient Certificateless Conditional Privacy-Preserving Authentication for VANETs. IEEE Trans. Veh. Technol. 2022, 71, 7863–7875. [Google Scholar] [CrossRef]
- Verma, G.K.; Singh, B.B.; Kumar, N.; Chamola, V. CB-CAS: Certificate-Based Efficient Signature Scheme with Compact Aggregation for Industrial Internet of Things Environment. IEEE Internet Things J. 2020, 7, 2563–2572. [Google Scholar] [CrossRef]
- Yang, W.; Wang, S.; Mu, Y. An Enhanced Certificateless Aggregate Signature Without Pairings for E-Healthcare System. IEEE Internet Things J. 2021, 8, 5000–5008. [Google Scholar] [CrossRef]
- He, D.; Zeadally, S.; Xu, B.; Huang, X. An Efficient Identity-Based Conditional Privacy-Preserving Authentication Scheme for Vehicular Ad Hoc Networks. IEEE Trans. Inf. Forensics Secur. 2015, 10, 2681–2691. [Google Scholar] [CrossRef]
- Veins. Available online: http://veins.car2x.org (accessed on 5 April 2021).
- Sommer, C.; German, R.; Dressler, F. Bidirectionally coupled network and road simulation for improved IVC analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef] [Green Version]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban MObility. Iaria 2011. Available online: https://www.eclipse.org/sumo/ (accessed on 5 April 2021).
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban MObility: An overview. In Proceedings of the SIMUL 2011, the Third International Conference on Advances in System Simulation, ThinkMind, Barcelona, Spain, 23–29 October 2011. [Google Scholar]
- OMNET. Available online: https://omnetpp.org/ (accessed on 5 April 2021).
- OpenStreetMap. Available online: https://www.openstreetmap.org (accessed on 20 January 2022).
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Authentication | Privacy Preserving | Other Security Requirements (Non-Repudiation and Unlinkability) | Context Awareness (Adapting to Various Contexts) | Role-Based Nodes | |||
|---|---|---|---|---|---|---|---|---|
| Adapting to Variations in Malicious Vehicles Density | Adapting to Variations in Legitimate Vehicle Density | Adapting to Variations in Vehicles Speed | ||||||
| Liu et al. [22] | Yes | Yes | No | No | No | |||
| Liu et al. [23] | Yes | Yes | Yes | High | No | Normal | Yes | |
| Guo et al. [24] | No | No | No | High | No | No | ||
| Gao et al. [25] | No | No | No | Normal | Normal | High | No | |
| Bhargava and Verma [26] | No | No | No | Normal | Normal | Normal | No | |
| Liu et al. [27] | Yes | No | Non-repudiation is achieved but unlinkability is not provided | Normal | No | Yes | ||
| Inedjaren et al. [28] | No | No | No | High | No | No | ||
| Ghaleb et al. [29] | No | No | No | Normal | Normal | High | No | |
| Ahmad et al. [30] | No | No | No | High | No | Normal | Yes | |
| Ghaleb et al. [31] | No | No | No | No | High | Normal | No | |
| Rehman et al. [32] | No | No | No | High | Normal | No | Yes | |
| Ghajar et al. [33] | No | No | No | No | No | |||
| Chukwuocha et al. [34] | No | No | No | No | No | |||
| Hasrouny et al. [35] | Yes | Yes | Non-repudiation is achieved but unlinkability is not provided | No | No | |||
| Scheme | Adopts Blockchain (Secure and Efficient Data Storage) | Communication Scenario | Traceability and Revocation of Malicious Vehicles | Efficiency (Computational Cost and Communication Overhead) | Resistance to Attacks | |||
| V2V | V2I | |||||||
| Liu et al. [22] | No | Yes | No | No | Efficient | False-message attacks, replay attacks, message-tampering attack | ||
| Liu et al. [23] | No | Yes | No | Malicious vehicles can be traced but no revocation | Efficient in terms of communication overhead but the computation cost is not provided | Malicious vehicles | ||
| Guo et al. [24] | No | Yes | No | No | No | False-message attacks | ||
| Gao et al. [25] | No | Yes | No | No | No | False-message attacks, message-tampering attacks, message-dropping attacks, and opinion-tampering attacks | ||
| Bhargava and Verma [26] | No | Yes | No | No | No | False-message attacks, message- tampering attacks, and message-dropping attacks | ||
| Liu et al. [27] | No | Yes | No | Yes | No | False-message attacks, opinion-tampering attacks | ||
| Inedjaren et al. [28] | Yes | Yes | No | No | No | Message-dropping attacks | ||
| Ghaleb et al. [29] | No | Yes | No | No | No | False-message attacks | ||
| Ahmad et al. [30] | No | Yes | No | No | No | Message-tampering attacks, message-delaying attacks | ||
| Ghaleb et al. [31] | No | Yes | No | No | No | Malicious vehicles | ||
| Rehman et al. [32] | No | Yes | No | No | No | Malicious vehicles | ||
| Ghajar et al. [33] | Yes | Yes | No | No | No | False-message attacks | ||
| Chukwuocha et al. [34] | Yes | Yes | No | No | No | False-message attacks | ||
| Hasrouny et al. [35] | No | Yes | No | Yes | No | Malicious vehicles | ||
| Notation | Description |
|---|---|
| Roadside unit | |
| Vehicle | |
| ECC-based cyclic additive group | |
| Bilinear pairing-based cyclic additive group | |
| Generator of | |
| An elliptic curve | |
| Two large prime numbers | |
| Vehicle ’s real identity | |
| Vehicle ’s pseudonym | |
| s | Public and secret master key pair of the TA |
| Public and private parameters generated by TA | |
| Public and private keys of | |
| ’s public and private keys | |
| Vehicle partial private key | |
| Cryptographic one-way hash functions | |
| Validity period of and the message timestamp | |
| A message from | |
| Signature from on message | |
| Exclusive OR operator |
| VB | |||||
|---|---|---|---|---|---|
| Pseudo-Identity (PID) | |||||
| VA | PIDA | 22.421400 | 121.490800 | 20 | W |
| VC | PIDC | 22.421600 | 121.490600 | 21 | W |
| VD | PIDD | 22.421200 | 121.490100 | 24 | E |
| VA | ||||||
|---|---|---|---|---|---|---|
| Pseudo-Identity (PID) | ||||||
| Vehicle Role | Location of VA | |||||
| PIDA | OV | Traffic jam | 22.421200 | 121.490700 | 22.21100 | 121.490600 |
| Notation | Operation | Execution Time (ms) |
|---|---|---|
| Bilinear pairing | 4.2110 | |
| Bilinear-pairing-based scalar multiplication | 1.7090 | |
| Bilinear-pairing-based point addition | 0.0071 | |
| A map-to-point hash function | 4.406 | |
| ECC-based scalar multiplication | 0.4420 | |
| ECC-based point addition | 0.0018 | |
| A secure hash function | 0.0001 |
| Scheme | Signing Cost (ms) | Verification Cost of Individual Signature (ms) | Signatures (ms) |
|---|---|---|---|
| Kumar et al. [37] | |||
| Mei et al. [38] | |||
| Zhao et al. [39] | |||
| Kamil et al. [40] | |||
| Xu et al. [41] | |||
| Liu et al. [42] | |||
| Wang et al. [43] | |||
| Zhou et al. [45] | |||
| Verma et al. [46] | |||
| Yang et al. [47] | |||
| The proposed scheme |
| Schemes | Signing a Message (%) | Verifying Individual Signature (%) | Signatures |
|---|---|---|---|
| Kumar et al. [37] | 96.07 | 95.68 | 95.34 |
| Mei et al. [38] | 97.18 | 95.43 | 87.67 |
| Zhao et al. [39] | 97.18 | 95.43 | 87.54 |
| Kamil et al. [40] | 96.07 | 94.65 | 94.32 |
| Xu et al. [41] | 95.37 | 94.65 | 94.33 |
| Liu et al. [42] | 95.37 | 94.65 | 94.32 |
| Wang et al. [43] | 66.71 | 88.79 | 87.1 |
| Zhou et al. [45] | 0.02 | 25.03 | 50.28 |
| Verma et al. [46] | 50.30 | 0.00 | 49.19 |
| Yang et al. [47] | 0.02 | 25 | 74.49 |
| Type of Element | Description | Size (Bytes) |
|---|---|---|
| An element of a group | 128 | |
| An element of a group | 40 | |
| An element of a finite field | 20 | |
| Time-stamp | 4 |
| Scheme | Single Message (Bytes) | Messages (Bytes) |
|---|---|---|
| Kumar et al. [37] | 536 | 536 |
| Mei et al. [38] | 540 | 540 |
| Zhao et al. [39] | 388 | 388 |
| Kamil et al. [40] | 540 | 540 |
| Xu et al. [41] | 404 | 404 |
| Liu et al. [42] | 404 | 404 |
| Wang et al. [43] | 792 | 792 |
| Zhou et al. [45] | 208 | 208 |
| Verma et al. [46] | 220 | 220 |
| Yang et al. [47] | 164 | 164 |
| The proposed scheme | 128 | 128 |
| Parameter | Value | |
|---|---|---|
| Simulation Area | 3 km × 3 km | |
| Simulation Time | 1000 s | |
| Number of RSUs | 10 | |
| Number of Vehicles | 100, 200, 300, 400, 500 | |
| Role-Based Vehicles (%) | AV | 10 |
| PS | 20 | |
| OV | 70 | |
| Vehicle Speed | 5 m/s, 10 m/s, 15 m/s, 20 m/s, 30 m/s | |
| Malicious Vehicles (%) | 10, 20, 30, 40, 50 | |
| Network Protocol | WAVE | |
| MAC Protocol | IEEE 802.11p | |
| Transmission Range | 300 m | |
| Trust Threshold | 0.5 | |
| Initial Trust | 0.3 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, W.; Di, W.; Mukathe, D. Blockchain-Assisted Privacy-Preserving and Context-Aware Trust Management Framework for Secure Communications in VANETs. Sensors 2023, 23, 5766. https://doi.org/10.3390/s23125766
Ahmed W, Di W, Mukathe D. Blockchain-Assisted Privacy-Preserving and Context-Aware Trust Management Framework for Secure Communications in VANETs. Sensors. 2023; 23(12):5766. https://doi.org/10.3390/s23125766
Chicago/Turabian StyleAhmed, Waheeb, Wu Di, and Daniel Mukathe. 2023. "Blockchain-Assisted Privacy-Preserving and Context-Aware Trust Management Framework for Secure Communications in VANETs" Sensors 23, no. 12: 5766. https://doi.org/10.3390/s23125766