

Cloud and Precipitation Profiling Radars: The First Combined W- and K-Band Radar Profiler Measurements in Italy

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Literature Review and Theoretical Background of Ground-Based Cloud Radar Potentials
2.1. Single-Frequency Methods
2.2. Dual-Frequency Radar Methods
2.2.1. Reflectivity-Based Methods
2.2.2. Spectral-Based Methods
2.2.3. Doppler-Based Methods
2.3. Triple-Frequency Radar Methods
2.4. Complementarity with Other Instruments
3. The Casale Calore Observatory in L’Aquila
3.1. K-Band Radar
3.2. W-Band Radar
3.3. Disdrometers
3.3.1. Laser Precipitation Monitor
3.3.2. 3D-Stereo Disdrometer
3.4. Other Instruments at the Casale Calore Site
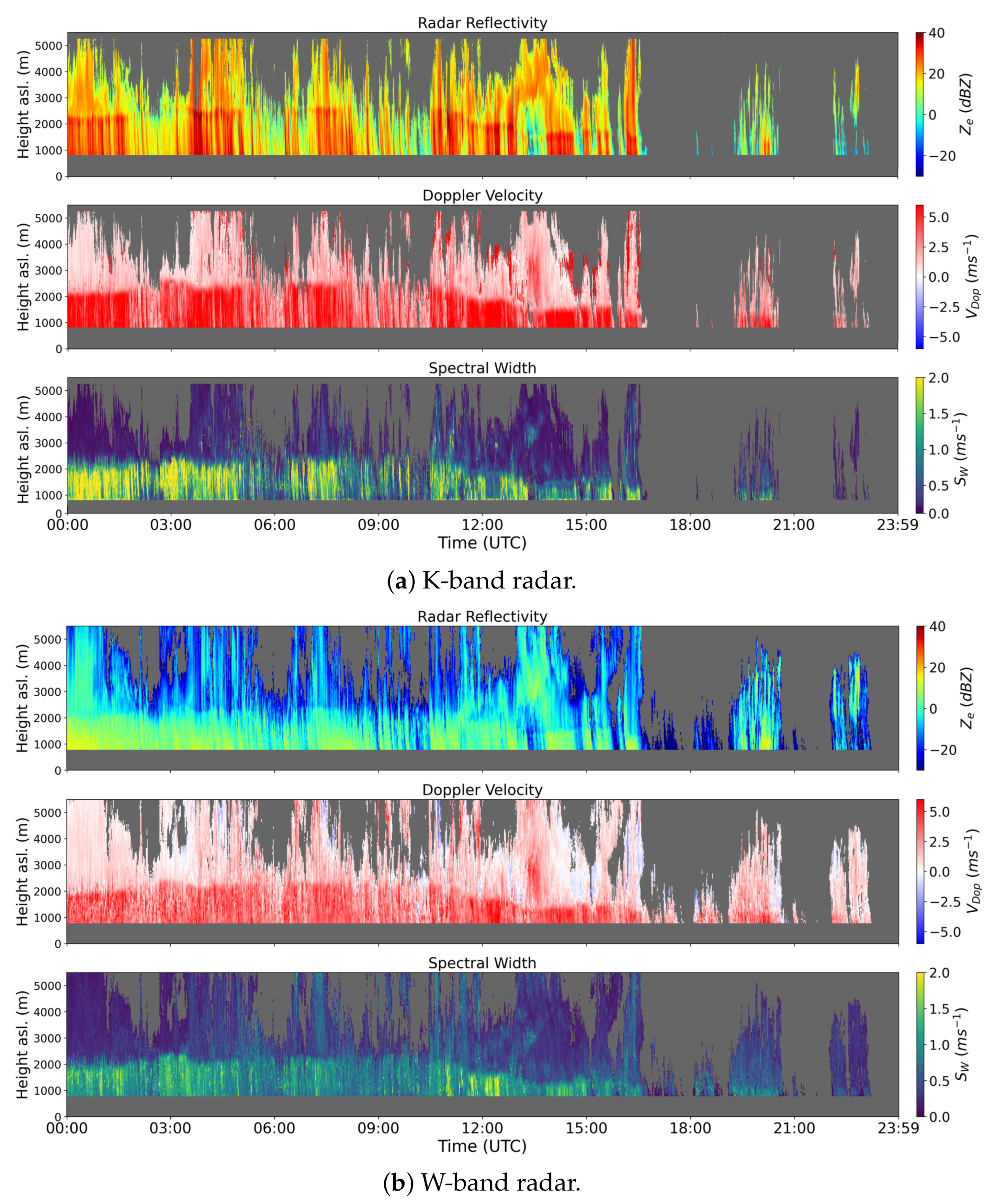
4. First Dual-Frequency (K, W) Measurements during the CORE-LAQ Field Campaign
4.1. K- and W-Band Measurement Consistency
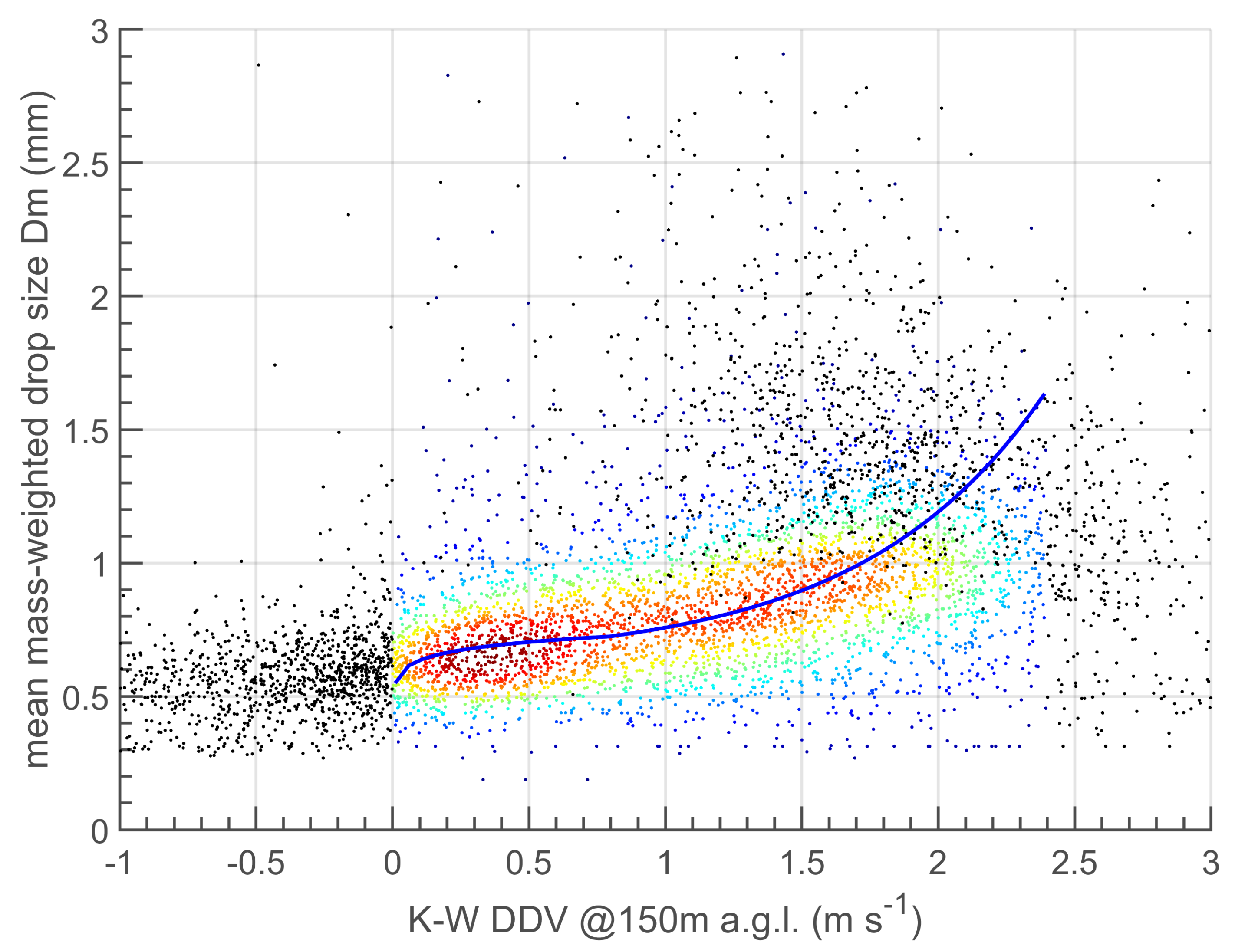
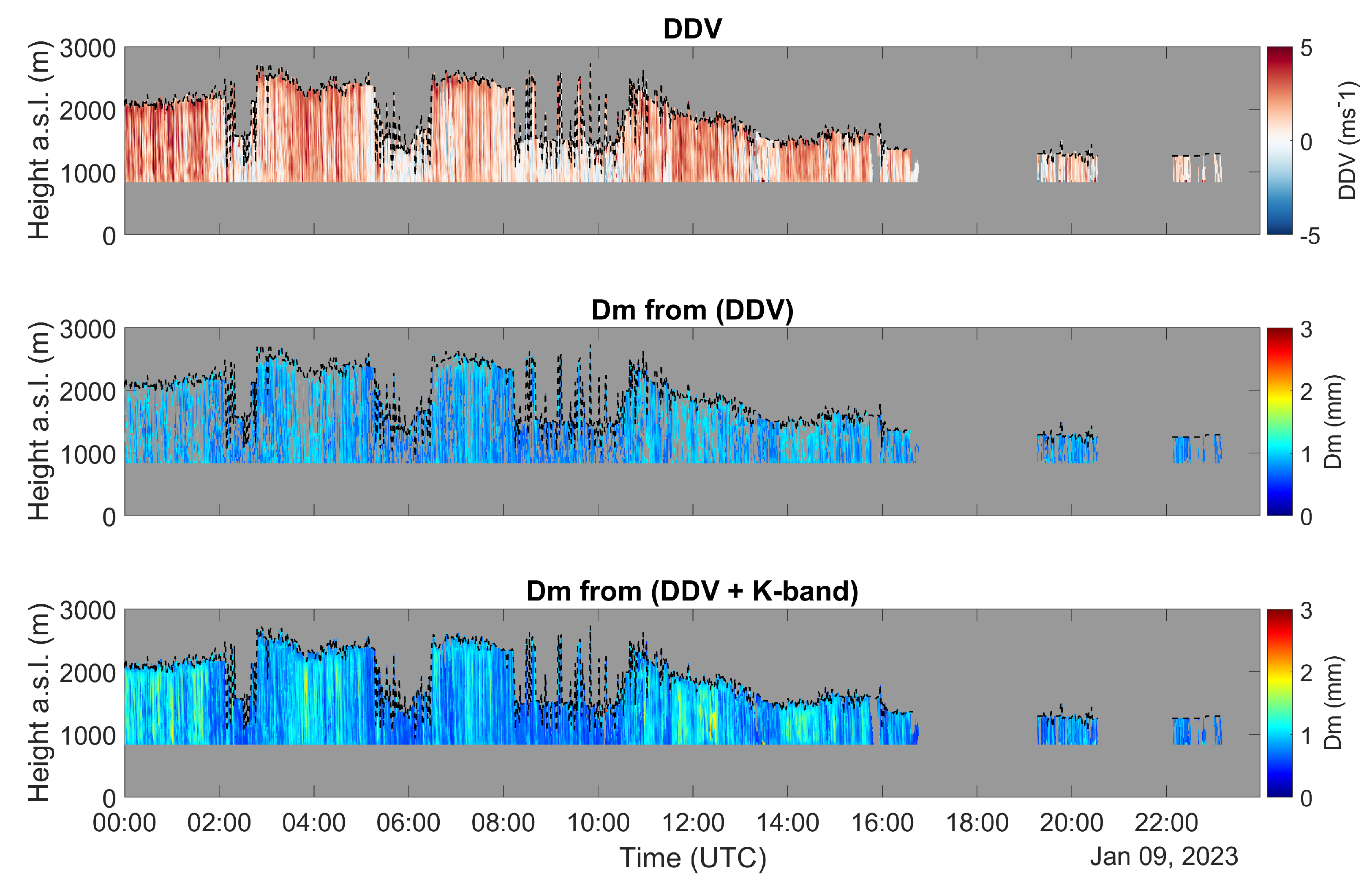
4.2. K- and W-Band Dual-Doppler Velocity Retrieval
4.3. Limitations and Comparison with Previous Literature Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ramanathan, V.; Cess, R.D.; Harrison, E.F.; Minnis, P.; Barkstrom, B.R.; Ahmad, E.; Hartmann, D. Cloud-Radiative Forcing and Climate: Results from the Earth Radiation Budget Experiment. Science 1989, 243, 57–63. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ebell, K.; Crewell, S.; Löhnert, U.; Turner, D.D.; O’Connor, E.J. Cloud statistics and cloud radiative effect for a low-mountain site. Q. J. R. Meteorol. Soc. 2011, 137, 306–324. [Google Scholar] [CrossRef]
- Ebell, K.; Nomokonova, T.; Maturilli, M.; Ritter, C. Radiative Effect of Clouds at Ny-Ålesund, Svalbard, as Inferred from Ground-Based Remote Sensing Observations. J. Appl. Meteorol. Climatol. 2020, 59, 3–22. [Google Scholar] [CrossRef] [Green Version]
- Hogan, R.J.; O’Connor, E.J.; Illingworth, A.J. Verification of cloud-fraction forecasts. Q. J. R. Meteorol. Soc. 2009, 135, 1494–1511. [Google Scholar] [CrossRef]
- Bouniol, D.; Protat, A.; Delanoë, J.; Pelon, J.; Piriou, J.M.; Bouyssel, F.; Tompkins, A.M.; Wilson, D.R.; Morille, Y.; Haeffelin, M.; et al. Using Continuous Ground-Based Radar and Lidar Measurements for Evaluating the Representation of Clouds in Four Operational Models. J. Appl. Meteorol. Climatol. 2010, 49, 1971–1991. [Google Scholar] [CrossRef]
- Stokes, G.M.; Schwartz, S.E. The Atmospheric Radiation Measurement (ARM) Program: Programmatic Background and Design of the Cloud and Radiation Test Bed. Bull. Am. Meteorol. Soc. 1994, 75, 1201–1222. [Google Scholar] [CrossRef]
- Ackerman, T.P.; Stokes, G.M. The Atmospheric Radiation Measurement Program. Phys. Today 2003, 56, 38–44. [Google Scholar] [CrossRef] [Green Version]
- Kollias, P.; Bharadwaj, N.; Clothiaux, E.E.; Lamer, K.; Oue, M.; Hardin, J.; Isom, B.; Lindenmaier, I.; Matthews, A.; Luke, E.P.; et al. The ARM Radar Network: At the Leading Edge of Cloud and Precipitation Observations. Bull. Am. Meteorol. Soc. 2020, 101, E588–E607. [Google Scholar] [CrossRef] [Green Version]
- Haeffelin, M.; Crewell, S.; Illingworth, A.J.; Pappalardo, G.; Russchenberg, H.; Chiriaco, M.; Ebell, K.; Hogan, R.J.; Madonna, F. Parallel Developments and Formal Collaboration between European Atmospheric Profiling Observatories and the U.S. ARM Research Program. Meteorol. Monogr. 2016, 57, 29.1–29.34. [Google Scholar] [CrossRef] [Green Version]
- Hogan, R.J.; Francis, P.N.; Flentje, H.; Illingworth, A.J.; Quante, M.; Pelon, J. Characteristics of mixed-phase clouds. I: Lidar, radar and aircraft observations from CLARE’98. Q. J. R. Meteorol. Soc. 2003, 129, 2089–2116. [Google Scholar] [CrossRef] [Green Version]
- Illingworth, A.J.; Barker, H.W.; Beljaars, A.; Ceccaldi, M.; Chepfer, H.; Clerbaux, N.; Cole, J.; Delanoë, J.; Domenech, C.; Donovan, D.P.; et al. The EarthCARE Satellite: The Next Step Forward in Global Measurements of Clouds, Aerosols, Precipitation, and Radiation. Bull. Am. Meteorol. Soc. 2015, 96, 1311–1332. [Google Scholar] [CrossRef] [Green Version]
- Illingworth, A.J.; Hogan, R.J.; O’Connor, E.; Bouniol, D.; Brooks, M.E.; Delanoé, J.; Donovan, D.P.; Eastment, J.D.; Gaussiat, N.; Goddard, J.W.F.; et al. Cloudnet: Continuous Evaluation of Cloud Profiles in Seven Operational Models Using Ground-Based Observations. Bull. Am. Meteorol. Soc. 2007, 88, 883–898. [Google Scholar] [CrossRef] [Green Version]
- ACTRIS-IT. Available online: http://www.actris.it/index.php/en/ (accessed on 30 March 2023).
- Maiello, I.; Gentile, S.; Ferretti, R.; Baldini, L.; Roberto, N.; Picciotti, E.; Alberoni, P.P.; Marzano, F.S. Impact of multiple radar reflectivity data assimilation on the numerical simulation of a flash flood event during the HyMeX campaign. Hydrol. Earth Syst. Sci. 2017, 21, 5459–5476. [Google Scholar] [CrossRef] [Green Version]
- Gorgucci, E.; Baldini, L. Influence of Beam Broadening on the Accuracy of Radar Polarimetric Rainfall Estimation. J. Hydrometeorol. 2015, 16, 1356–1371. [Google Scholar] [CrossRef]
- Montopoli, M.; Roberto, N.; Adirosi, E.; Gorgucci, E.; Baldini, L. Investigation of Weather Radar Quantitative Precipitation Estimation Methodologies in Complex Orography. Atmosphere 2017, 8, 34. [Google Scholar] [CrossRef] [Green Version]
- Giangrande, S.E.; Luke, E.P.; Kollias, P. Automated retrievals of precipitation parameters using non-Rayleigh scattering at 95 GHz. J. Atmos. Ocean. Technol. 2010, 27, 1490–1503. [Google Scholar] [CrossRef]
- Giangrande, S.E.; Luke, E.P.; Kollias, P. Characterization of Vertical Velocity and Drop Size Distribution Parameters in Widespread Precipitation at ARM Facilities. J. Appl. Meteorol. Climatol. 2012, 51, 380–391. [Google Scholar] [CrossRef] [Green Version]
- Firda, J.M.; Sekelsky, S.M.; McIntosh, R.E. Application of Dual-Frequency Millimeter-Wave Doppler Spectra for the Retrieval of Drop Size Distributions and Vertical Air Motion in Rain. J. Atmos. Ocean. Technol. 1999, 16, 216–236. [Google Scholar] [CrossRef]
- Tridon, F.; Battaglia, A. Dual-frequency radar Doppler spectral retrieval of rain drop size distributions and entangled dynamics variables. J. Geophys. Res. Atmos. 2015, 120, 5585–5601. [Google Scholar] [CrossRef] [Green Version]
- Matrosov, S.Y. Feasibility of using radar differential Doppler velocity and dual-frequency ratio for sizing particles in thick ice clouds. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Matrosov, S.Y.; Maahn, M.; de Boer, G. Observational and Modeling Study of Ice Hydrometeor Radar Dual-Wavelength Ratios. J. Appl. Meteorol. Climatol. 2019, 58, 2005–2017. [Google Scholar] [CrossRef]
- Matrosov, S.Y. Characteristic Raindrop Size Retrievals from Measurements of Differences in Vertical Doppler Velocities at Ka- and W-Band Radar Frequencies. J. Atmos. Ocean. Technol. 2017, 34, 65–71. [Google Scholar] [CrossRef]
- Tridon, F.; Planche, C.; Mroz, K.; Banson, S.; Battaglia, A.; Baelen, J.V.; Wobrock, W. On the Realism of the Rain Microphysics Representation of a Squall Line in the WRF Model. Part I: Evaluation with Multifrequency Cloud Radar Doppler Spectra Observations. Mon. Weather Rev. 2019, 147, 2787–2810. [Google Scholar] [CrossRef] [Green Version]
- Vogl, T.; Maahn, M.; Kneifel, S.; Schimmel, W.; Moisseev, D.; Kalesse-Los, H. Using artificial neural networks to predict riming from Doppler cloud radar observations. Atmos. Meas. Tech. 2022, 15, 365–381. [Google Scholar] [CrossRef]
- Schimmel, W.; Kalesse-Los, H.; Maahn, M.; Vogl, T.; Foth, A.; Garfias, P.S.; Seifert, P. Identifying cloud droplets beyond lidar attenuation from vertically pointing cloud radar observations using artificial neural networks. Atmos. Meas. Tech. 2022, 15, 5343–5366. [Google Scholar] [CrossRef]
- Szyrmer, W.; Zawadzki, I. Snow Studies. Part IV: Ensemble Retrieval of Snow Microphysics from Dual-Wavelength Vertically Pointing Radars. J. Atmos. Sci. 2014, 71, 1171–1186. [Google Scholar] [CrossRef]
- Chellini, G.; Gierens, R.; Kneifel, S. Ice Aggregation in Low-Level Mixed-Phase Clouds at a High Arctic Site: Enhanced by Dendritic Growth and Absent Close to the Melting Level. J. Geophys. Res. Atmos. 2022, 127, e2022JD036860. [Google Scholar] [CrossRef]
- Kneifel, S.; Kollias, P.; Battaglia, A.; Leinonen, J.; Maahn, M.; Kalesse, H.; Tridon, F. First observations of triple-frequency radar Doppler spectra in snowfall: Interpretation and applications. Geophys. Res. Lett. 2016, 43, 2225–2233. [Google Scholar] [CrossRef] [Green Version]
- Grecu, M.; Tian, L.; Heymsfield, G.M.; Tokay, A.; Olson, W.S.; Heymsfield, A.J.; Bansemer, A. Nonparametric Methodology to Estimate Precipitating Ice from Multiple-Frequency Radar Reflectivity Observations. J. Appl. Meteorol. Climatol. 2018, 57, 2605–2622. [Google Scholar] [CrossRef]
- Mason, S.L.; Chiu, C.J.; Hogan, R.J.; Moisseev, D.; Kneifel, S. Retrievals of Riming and Snow Density from Vertically Pointing Doppler Radars. J. Geophys. Res. Atmos. 2018, 123, 13807–13834. [Google Scholar] [CrossRef] [Green Version]
- Mason, S.L.; Hogan, R.J.; Westbrook, C.D.; Kneifel, S.; Moisseev, D.; von Terzi, L. The importance of particle size distribution and internal structure for triple-frequency radar retrievals of the morphology of snow. Atmos. Meas. Tech. 2019, 12, 4993–5018. [Google Scholar] [CrossRef] [Green Version]
- Leinonen, J.; Lebsock, M.D.; Tanelli, S.; Sy, O.O.; Dolan, B.; Chase, R.J.; Finlon, J.A.; von Lerber, A.; Moisseev, D. Retrieval of snowflake microphysical properties from multifrequency radar observations. Atmos. Meas. Tech. 2018, 11, 5471–5488. [Google Scholar] [CrossRef] [Green Version]
- Barrett, A.I.; Westbrook, C.D.; Nicol, J.C.; Stein, T.H.M. Rapid ice aggregation process revealed through triple-wavelength Doppler spectrum radar analysis. Atmos. Chem. Phys. 2019, 19, 5753–5769. [Google Scholar] [CrossRef] [Green Version]
- Mróz, K.; Battaglia, A.; Kneifel, S.; D’Adderio, L.P.; Dias Neto, J. Triple-Frequency Doppler Retrieval of Characteristic Raindrop Size. Earth Space Sci. 2020, 7, e2019EA000789. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Sassen, K. Cloud Type and Macrophysical Property Retrieval Using Multiple Remote Sensors. J. Appl. Meteorol. 2001, 40, 1665–1682. [Google Scholar] [CrossRef]
- Shupe, M.D.; Walden, V.P.; Eloranta, E.; Uttal, T.; Campbell, J.R.; Starkweather, S.M.; Shiobara, M. Clouds at Arctic Atmospheric Observatories. Part I: Occurrence and Macrophysical Properties. J. Appl. Meteorol. Climatol. 2011, 50, 626–644. [Google Scholar] [CrossRef] [Green Version]
- Nomokonova, T.; Ebell, K.; Löhnert, U.; Maturilli, M.; Ritter, C.; O’Connor, E. Statistics on clouds and their relation to thermodynamic conditions at Ny-Ålesund using ground-based sensor synergy. Atmos. Chem. Phys. 2019, 19, 4105–4126. [Google Scholar] [CrossRef] [Green Version]
- Achtert, P.; O’Connor, E.J.; Brooks, I.M.; Sotiropoulou, G.; Shupe, M.D.; Pospichal, B.; Brooks, B.J.; Tjernström, M. Properties of Arctic liquid and mixed-phase clouds from shipborne Cloudnet observations during ACSE 2014. Atmos. Chem. Phys. 2020, 20, 14983–15002. [Google Scholar] [CrossRef]
- Pîrloagă, R.; Ene, D.; Boldeanu, M.; Antonescu, B.; O’Connor, E.J.; Ştefan, S. Ground-Based Measurements of Cloud Properties at the Bucharest—Magurele Cloudnet Station: First Results. Atmosphere 2022, 13, 1445. [Google Scholar] [CrossRef]
- Lhermitte, R. A 94-GHz Doppler Radar for Cloud Observations. J. Atmos. Ocean. Technol. 1987, 4, 36–48. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Marks, F. Why Mie?: Accurate Observations of Vertical Air Velocities and Raindrops Using a Cloud Radar. Bull. Am. Meteorol. Soc. 2002, 83, 1471–1484. [Google Scholar] [CrossRef] [Green Version]
- Lhermitte, R. Attenuation and Scattering of Millimeter Wavelength Radiation by Clouds and Precipitation. J. Atmos. Ocean. Technol. 1990, 7, 464–479. [Google Scholar] [CrossRef]
- Hogan, R.J.; Gaussiat, N.; Illingworth, A.J. Stratocumulus Liquid Water Content from Dual-Wavelength Radar. J. Atmos. Ocean. Technol. 2005, 22, 1207–1218. [Google Scholar] [CrossRef]
- Gaussiat, N.; Sauvageot, H.; Illingworth, A.J. Cloud Liquid Water and Ice Content Retrieval by Multiwavelength Radar. J. Atmos. Ocean. Technol. 2003, 20, 1264–1275. [Google Scholar] [CrossRef]
- Hogan, R.J.; Mittermaier, M.P.; Illingworth, A.J. The Retrieval of Ice Water Content from Radar Reflectivity Factor and Temperature and Its Use in Evaluating a Mesoscale Model. J. Appl. Meteorol. Climatol. 2006, 45, 301–317. [Google Scholar] [CrossRef] [Green Version]
- Huang, D.; Johnson, K.; Liu, Y.; Wiscombe, W. High resolution retrieval of liquid water vertical distributions using collocated Ka-band and W-band cloud radars. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Delanoë, J.; Hogan, R.J. A variational scheme for retrieving ice cloud properties from combined radar, lidar, and infrared radiometer. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Tridon, F.; Battaglia, A.; Luke, E.; Kollias, P. Rain retrieval from dual-frequency radar Doppler spectra: Validation and potential for a midlatitude precipitating case-study. Q. J. R. Meteorol. Soc. 2017, 143, 1364–1380. [Google Scholar] [CrossRef] [Green Version]
- Tridon, F.; Battaglia, A.; Kneifel, S. Estimating total attenuation using Rayleigh targets at cloud top: Applications in multilayer and mixed-phase clouds observed by ground-based multifrequency radars. Atmos. Meas. Tech. 2020, 13, 5065–5085. [Google Scholar] [CrossRef]
- Zhu, Z.; Lamer, K.; Kollias, P.; Clothiaux, E.E. The Vertical Structure of Liquid Water Content in Shallow Clouds as Retrieved from Dual-Wavelength Radar Observations. J. Geophys. Res. Atmos. 2019, 124, 14184–14197. [Google Scholar] [CrossRef]
- Schoger, S.Y.; Moisseev, D.; von Lerber, A.; Crewell, S.; Ebell, K. Snowfall-Rate Retrieval for K- and W-Band Radar Measurements Designed in Hyytiälä, Finland, and Tested at Ny-Ålesund, Svalbard, Norway. J. Appl. Meteorol. Climatol. 2021, 60, 273–289. [Google Scholar] [CrossRef]
- Hogan, R.; Connor, E. Facilitating Cloud Radar and Lidar Algorithms: The Cloudnet Instrument Synergy/Target Categorization Product. 2004. Available online: http://www.met.rdg.ac.uk/~swrhgnrj/publications/categorization.pdf (accessed on 8 June 2023).
- Wærsted, E.G.; Haeffelin, M.; Dupont, J.C.; Delanoë, J.; Dubuisson, P. Radiation in fog: Quantification of the impact on fog liquid water based on ground-based remote sensing. Atmos. Chem. Phys. 2017, 17, 10811–10835. [Google Scholar] [CrossRef] [Green Version]
- Bell, A.; Martinet, P.; Caumont, O.; Vié, B.; Delanoë, J.; Dupont, J.C.; Borderies, M. W-band radar observations for fog forecast improvement: An analysis of model and forward operator errors. Atmos. Meas. Tech. 2021, 14, 4929–4946. [Google Scholar] [CrossRef]
- Hogan, R.J.; Illingworth, A.J.; Sauvageot, H. Measuring Crystal Size in Cirrus Using 35- and 94-GHz Radars. J. Atmos. Ocean. Technol. 2000, 17, 27–37. [Google Scholar] [CrossRef]
- Dias Neto, J.; Kneifel, S.; Ori, D.; Trömel, S.; Handwerker, J.; Bohn, B.; Hermes, N.; Mühlbauer, K.; Lenefer, M.; Simmer, C. The TRIple-frequency and Polarimetric radar Experiment for improving process observations of winter precipitation. Earth Syst. Sci. Data 2019, 11, 845–863. [Google Scholar] [CrossRef] [Green Version]
- Hogan, R.J.; Bouniol, D.; Ladd, D.N.; O’Connor, E.J.; Illingworth, A.J. Absolute Calibration of 94/95-GHz Radars Using Rain. J. Atmos. Ocean. Technol. 2003, 20, 572–580. [Google Scholar] [CrossRef]
- Protat, A.; Bouniol, D.; O’Connor, E.J.; Baltink, H.K.; Verlinde, J.; Widener, K. CloudSat as a Global Radar Calibrator. J. Atmos. Ocean. Technol. 2011, 28, 445–452. [Google Scholar] [CrossRef]
- Kollias, P.; Puigdomènech Treserras, B.; Protat, A. Calibration of the 2007–2017 record of Atmospheric Radiation Measurements cloud radar observations using CloudSat. Atmos. Meas. Tech. 2019, 12, 4949–4964. [Google Scholar] [CrossRef] [Green Version]
- Myagkov, A.; Kneifel, S.; Rose, T. Evaluation of the reflectivity calibration of W-band radars based on observations in rain. Atmos. Meas. Tech. 2020, 13, 5799–5825. [Google Scholar] [CrossRef]
- Sarna, K.; Russchenberg, H.W.J. Ground-based remote sensing scheme for monitoring aerosol–cloud interactions. Atmos. Meas. Tech. 2016, 9, 1039–1050. [Google Scholar] [CrossRef]
- Petäjä, T.; Tabakova, K.; Manninen, A.; Ezhova, E.; O’Connor, E.; Moisseev, D.; Sinclair, V.A.; Backman, J.; Levula, J.; Luoma, K.; et al. Influence of biogenic emissions from boreal forests on aerosol–cloud interactions. Nat. Geosci. 2022, 15, 42–47. [Google Scholar] [CrossRef]
- Luini, L.; Nebuloni, R.; Riva, C. Ka-to-W Band EM Wave Propagation: Tropospheric Effects and Countermeasures. In Wave Propagation Concepts for Near-Future Telecommunication Systems; Costanzo, S., Ed.; IntechOpen: Rijeka, Croatia, 2017; Chapter 3. [Google Scholar] [CrossRef]
- Gunn, R.; Kinzer, G.D. The Terminal Velocity of Fall for Water Droplets in Stagnant Air. J. Atmos. Sci. 1949, 6, 243–248. [Google Scholar] [CrossRef]
- Rogers, R.R.; Pilié, R.J. Radar Measurements of Drop-Size Distribution. J. Atmos. Sci. 1962, 19, 503–506. [Google Scholar] [CrossRef]
- Leinonen, J. High-level interface to T-matrix scattering calculations: Architecture, capabilities and limitations. Opt. Express 2014, 22, 1655–1660. [Google Scholar] [CrossRef] [PubMed]
- Foote, G.B.; du Toit, P.S. Terminal Velocity of Raindrops Aloft. J. Appl. Meteorol. 1969, 8, 249–253. [Google Scholar] [CrossRef]
- Williams, C.R. How Much Attenuation Extinguishes mm-Wave Vertically Pointing Radar Return Signals? Remote Sens. 2022, 14, 1305. [Google Scholar] [CrossRef]
- Testud, J.; Oury, S.; Black, R.A.; Amayenc, P.; Dou, X. The Concept of “Normalized” Distribution to Describe Raindrop Spectra: A Tool for Cloud Physics and Cloud Remote Sensing. J. Appl. Meteorol. 2001, 40, 1118–1140. [Google Scholar] [CrossRef]
- Adirosi, E.; Volpi, E.; Lombardo, F.; Baldini, L. Raindrop size distribution: Fitting performance of common theoretical models. Adv. Water Resour. 2016, 96, 290–305. [Google Scholar] [CrossRef]
- Matrosov, S.Y. A Dual-Wavelength Radar Method to Measure Snowfall Rate. J. Appl. Meteorol. 1998, 37, 1510–1521. [Google Scholar] [CrossRef]
- Meneghini, R.; Liao, L.; Iguchi, T. A Generalized Dual-Frequency Ratio (DFR) Approach for Rain Retrievals. J. Atmos. Ocean. Technol. 2022, 39, 1309–1329. [Google Scholar] [CrossRef]
- Liao, L.; Meneghini, R. A Modified Dual-Wavelength Technique for Ku- and Ka-Band Radar Rain Retrieval. J. Appl. Meteorol. Climatol. 2019, 58, 3–18. [Google Scholar] [CrossRef] [Green Version]
- Tridon, F.; Battaglia, A.; Kollias, P. Disentangling Mie and attenuation effects in rain using a Ka-W dual-wavelength Doppler spectral ratio technique. Geophys. Res. Lett. 2013, 40, 5548–5552. [Google Scholar] [CrossRef]
- Kneifel, S.; Kulie, M.S.; Bennartz, R. A triple-frequency approach to retrieve microphysical snowfall parameters. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Romatschke, U.; Vivekanandan, J. Cloud and Precipitation Particle Identification Using Cloud Radar and Lidar Measurements: Retrieval Technique and Validation. Earth Space Sci. 2022, 9, e2022EA002299. [Google Scholar] [CrossRef]
- Dias Neto, J.; Nuijens, L.; Unal, C.; Knoop, S. Combined Wind Lidar and Cloud Radar for Wind Profiling. Earth Syst. Sci. Data Discuss. 2022, 2022, 1–30. [Google Scholar] [CrossRef]
- Cloud boundary height measurements using lidar and radar. Phys. Chem. Earth Part B Hydrol. Ocean. Atmos. 2000, 25, 129–134. [CrossRef] [Green Version]
- Curci, G.; Guijarro, J.A.; Di Antonio, L.; Di Bacco, M.; Di Lena, B.; Scorzini, A.R. Building a local climate reference dataset: Application to the Abruzzo region (Central Italy), 1930–2019. Int. J. Climatol. 2021, 41, 4414–4436. [Google Scholar] [CrossRef]
- Curci, G.; Cinque, G.; Tuccella, P.; Visconti, G.; Verdecchia, M.; Iarlori, M.; Rizi, V. Modelling air quality impact of a biomass energy power plant in a mountain valley in Central Italy. Atmos. Environ. 2012, 62, 248–255. [Google Scholar] [CrossRef]
- Adirosi, E.; Porcù, F.; Montopoli, M.; Baldini, L.; Bracci, A.; Capozzi, V.; Annella, C.; Budillon, G.; Bucchignani, E.; Zollo, A.L.; et al. Database of the Italian disdrometer network. Earth Syst. Sci. Data 2023. under review. [Google Scholar] [CrossRef]
- D’Altorio, A.; Masci, F.; Rizi, V.; Visconti, G.; Boschi, E. Continuous lidar measurements of stratospheric aerosols and ozone after the Pinatubo eruption. Part I: Dial ozone retrieval in presence of stratospheric aerosol layers. Geophys. Res. Lett. 1993, 20, 2865–2868. [Google Scholar] [CrossRef]
- The EARLINET Publishing Group 2000–2015; Acheson, K.; Adam, M.; Alados-Arboledas, L.; Althausen, D.; Amato, F.; Amiridis, V.; Amodeo, A.; Ansmann, A.; Apituley, A.; et al. EARLINET Climatology 2000–2015. 2018. Available online: https://www.wdc-climate.de/ui/entry?acronym=EARLINET_Climatology_2000-2015 (accessed on 8 June 2023).
- EUMETNET/E-PROFILE Network. Available online: https://e-profile.eu (accessed on 30 March 2023).
- Beard, K.V.; Chuang, C. A New Model for the Equilibrium Shape of Raindrops. J. Atmos. Sci. 1987, 44, 1509–1524. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Applications | Output Variables | Description |
|---|---|---|
| Cloud microphysics |
|
|
| Cloud macrophysical properties |
|
|
| Cloud dynamical properties |
|
|
| Quantitative precipitation estimation |
|
|
| Cloud classification |
|
|
| Precipitation and fog forecast |
| |
| Calibration |
|
|
| Cloud–aerosol interaction |
|
|
| Propagation effects |
|
|
| Specifications | Units | K-Band | W-Band |
|---|---|---|---|
| Frequency | (GHz) | 24.23 | 94 |
| Chirp repetition frequency | (kHz) | Data | Data |
| Doppler velocity resolution | (ms) | 0.05–6 | (0.041, 0.080) |
| 3 dB Beam width | () | 1.5 | 0.56 |
| Nyquist velocity | (ms) | 12.3 | (±5.1, ±10.5) |
| Range resolution | (m) | 35 | |
| Temporal sampling | (s) | 10 | 1 |
| (Min., Max.) range | (km) | (0.1, 4.5) | (0.1, 10) |
| Minimum detectable reflectivity | (dBZ) | −8 | −47 (at 4 km agl.) |
| −36 (at 10 km agl.) |
| Attributes | Units | Chirp Sequence | ||
|---|---|---|---|---|
| 1 | 2 | 3 | ||
| Range interval | (km) | (0.1, 1.233) | (1.233, 5.037) | (5.037, 10) |
| Range resolution | (m) | 29.8 | 30.4 | 31.1 |
| Nyquist velocity | (±ms) | 10.5 | 7.9 | 5.1 |
| Doppler velocity resolution | (ms) | 0.041 | 0.062 | 0.080 |
| Temporal sampling | (s) | 0.156 | 0.388 | 0.462 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montopoli, M.; Bracci, A.; Adirosi, E.; Iarlori, M.; Di Fabio, S.; Lidori, R.; Balotti, A.; Baldini, L.; Rizi, V. Cloud and Precipitation Profiling Radars: The First Combined W- and K-Band Radar Profiler Measurements in Italy. Sensors 2023, 23, 5524. https://doi.org/10.3390/s23125524
Montopoli M, Bracci A, Adirosi E, Iarlori M, Di Fabio S, Lidori R, Balotti A, Baldini L, Rizi V. Cloud and Precipitation Profiling Radars: The First Combined W- and K-Band Radar Profiler Measurements in Italy. Sensors. 2023; 23(12):5524. https://doi.org/10.3390/s23125524
Chicago/Turabian StyleMontopoli, Mario, Alessandro Bracci, Elisa Adirosi, Marco Iarlori, Saverio Di Fabio, Raffaele Lidori, Andrea Balotti, Luca Baldini, and Vincenzo Rizi. 2023. "Cloud and Precipitation Profiling Radars: The First Combined W- and K-Band Radar Profiler Measurements in Italy" Sensors 23, no. 12: 5524. https://doi.org/10.3390/s23125524