
An Efficient Method for Laser Welding Depth Determination Using Optical Coherence Tomography

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Laser Welding Depth Measurement Using SD-OCT
2.2. Experimental Setup
2.3. Analysis of the Raw OCT Data
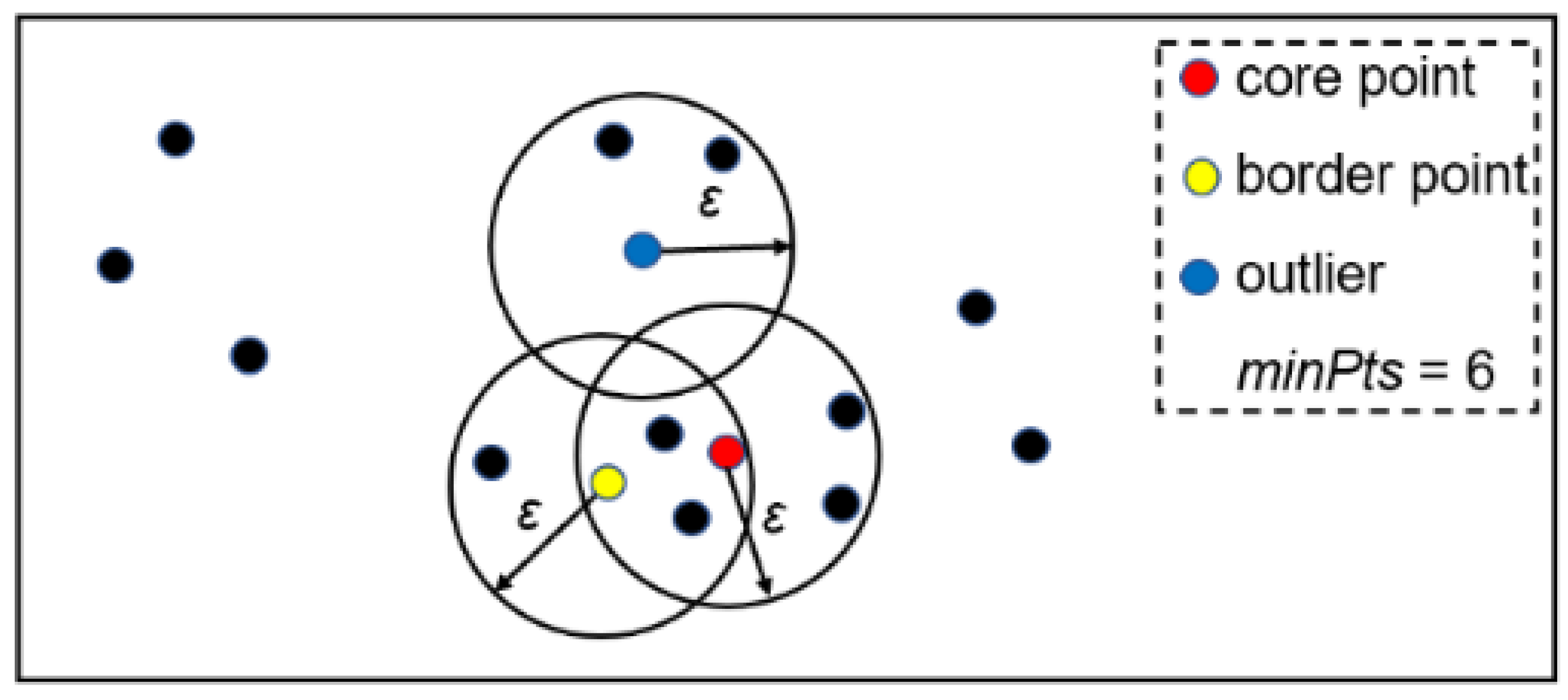
2.4. Outlier Detection of the Raw OCT Data
- Core point, if the number of points in an epsilon radius of it is not less than minPts;
- Border point, if it is not a core point but within an epsilon radius of a core point;
- Outlier, if neither a core point nor a border point.
| Algorithm 1 Abstract DBSCAN Algorithm |
| Inputs: dataset, epsilon, minPts |
|
|
|
|
|
| Output: outliers |
2.5. Percentile Filter
3. Results and Discussion
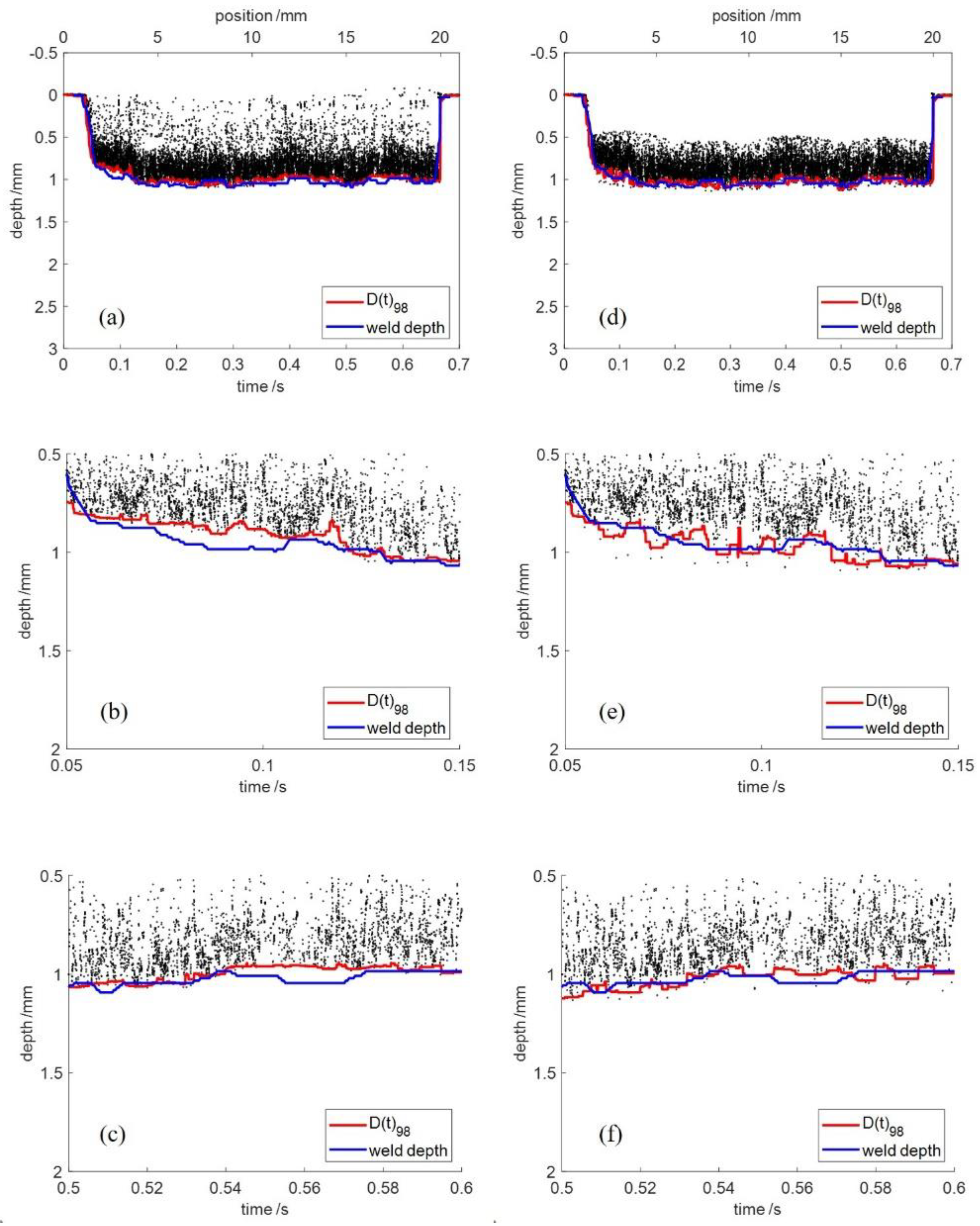
3.1. Welding Depth Extracted from the Cleaned OCT Data
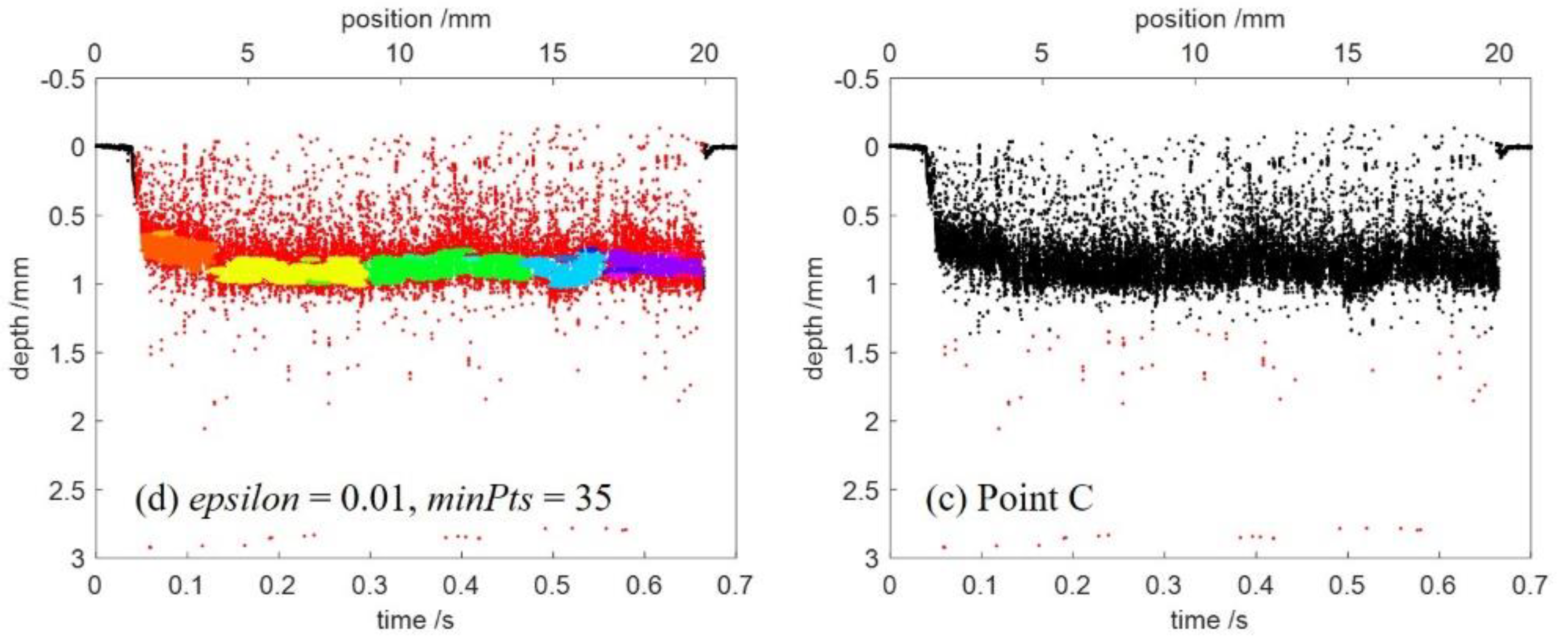
3.2. Evaluation of the DBSCAN
3.3. Evaluation of the Percentile Filter
3.4. Repeatability Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sadeghian, A.; Iqbal, N. A review on dissimilar laser welding of steel-copper, steel-aluminum, aluminum-copper, and steel-nickel for electric vehicle battery manufacturing. Opt. Laser Technol. 2022, 146, 107595. [Google Scholar] [CrossRef]
- Olsson, R.; Eriksson, I.; Powell, J.; Langtry, A.V.; Kaplan, A.F.H. Challenges to the interpretation of the electromagnetic feedback from laser welding. Opt. Lasers Eng. 2011, 49, 188–194. [Google Scholar] [CrossRef]
- Kim, C.-H.; Ahn, D.-C. Coaxial monitoring of keyhole during Yb: YAG laser welding. Opt. Laser Technol. 2012, 44, 1874–1880. [Google Scholar] [CrossRef]
- Gu, H.; Duley, W.W. A statistical approach to acoustic monitoring of laser welding. J. Phys. D 1996, 29, 556. [Google Scholar] [CrossRef]
- Huang, D.; Swanson, E.A.; Lin, C.P.; Schuman, J.S.; Stinson, W.G.; Chang, W.; Hee, M.R.; Flotte, T.; Gregory, K.; Puliafito, C.A. Optical coherence tomography. Science 1991, 254, 1178–1181. [Google Scholar] [CrossRef]
- Han, S.; Wijesinghe, R.E.; Jeon, D.; Han, Y.; Lee, J.; Lee, J.; Jo, H.; Lee, D.-E.; Jeon, M.; Kim, J. Optical Interferometric Fringe Pattern-Incorporated Spectrum Calibration Technique for Enhanced Sensitivity of Spectral Domain Optical Coherence Tomography. Sensors 2020, 20, 2067. [Google Scholar] [CrossRef]
- Shirazi, M.F.; Jeon, M.; Kim, J. Structural Analysis of Polymer Composites Using Spectral Domain Optical Coherence Tomography. Sensors 2017, 17, 1155. [Google Scholar] [CrossRef]
- Webster, P.J.; Joe, X.; Leung, B.Y.; Anderson, M.D.; Yang, V.X.; Fraser, J.M. In situ 24 kHz coherent imaging of morphology change in laser percussion drilling. Opt. Lett. 2010, 35, 646–648. [Google Scholar] [CrossRef] [PubMed]
- Kanko, J.A.; Sibley, A.P.; Fraser, J.M. In situ morphology-based defect detection of selective laser melting through inline coherent imaging. J. Mater. Process Technol. 2016, 231, 488–500. [Google Scholar] [CrossRef]
- Fleming, T.G.; Nestor, S.G.; Allen, T.R.; Boukhaled, M.A.; Smith, N.J.; Fraser, J.M. Tracking and controlling the morphology evolution of 3D powder-bed fusion in situ using inline coherent imaging. Addit. Manuf. 2020, 32, 100978. [Google Scholar] [CrossRef]
- DePond, P.J.; Guss, G.; Ly, S.; Calta, N.P.; Deane, D.; Khairallah, S.; Matthews, M.J. In situ measurements of layer roughness during laser powder bed fusion additive manufacturing using low coherence scanning interferometry. Mater. Des. 2018, 154, 347–359. [Google Scholar] [CrossRef]
- Webster, P.J.; Wright, L.G.; Ji, Y.; Galbraith, C.M.; Kinross, A.W.; Van Vlack, C.; Fraser, J.M. Automatic laser welding and milling with in situ inline coherent imaging. Opt. Lett. 2014, 39, 6217–6220. [Google Scholar] [CrossRef] [PubMed]
- Blecher, J.; Galbraith, C.; Van Vlack, C.; Palmer, T.; Fraser, J.; Webster, P.; DebRoy, T. Real time monitoring of laser beam welding keyhole depth by laser interferometry. Sci. Technol. Weld. Join. 2014, 19, 560–564. [Google Scholar] [CrossRef]
- Bautze, T.; Kogel-Hollacher, M. Keyhole depth is just a distance: The IDM sensor improves laser welding processes. Laser Tech. J. 2014, 11, 39–43. [Google Scholar] [CrossRef]
- Kogel-Hollacher, M.; Schoenleber, M.; Bautze, T.; Strebel, M.; Moser, R. Measurement and closed-loop control of the penetration depth in laser materials processing. In Proceedings of the 9th International Conference on Photonic Technologies LANE, Fürth, Germany, 19–22 September 2016. [Google Scholar]
- Miyagi, M.; Kawahito, Y.; Kawakami, H.; Shoubu, T. Dynamics of solid-liquid interface and porosity formation determined through x-ray phase-contrast in laser welding of pure Al. J. Mater. Process Technol. 2017, 250, 9–15. [Google Scholar] [CrossRef]
- Mittelstädt, C.; Mattulat, T.; Seefeld, T.; Kogel-Hollacher, M. Novel approach for weld depth determination using optical coherence tomography measurement in laser deep penetration welding of aluminum and steel. J. Laser Appl. 2019, 31, 22007. [Google Scholar] [CrossRef]
- Boley, M.; Berger, P.; Webster, P.J.; Weber, R.; Van Vlack, C.; Fraser, J.; Graf, T. Ivestigating the weld depth behaviour using different observation techniques: X-ray, inline coherent imageing and highspeed observation during welding ice. In Proceedings of the International Congress on Applications of Lasers & Electro-Optics, Miami, FL, USA, 6–10 October 2013; pp. 22–27. [Google Scholar]
- Authier, N.; Baptiste, A.; Bruyere, V.; Namy, P.; Touvrey, C. Implementation of an interferometric sensor for measuring the depth of a capillary laser welding. In Proceedings of the International Congress on Applications of Lasers & Electro-Optics, San Diego, CA, USA, 16–20 October 2016; p. 904. [Google Scholar]
- Fetzer, F.; Boley, M.; Weber, R.; Graf, T. Comprehensive analysis of the capillary depth in deep penetration laser welding. In Proceedings of the High-Power Laser Materials Processing: Applications, Diagnostics, and Systems VI, San Francisco, CA, USA, 31 January–2 February 2017; pp. 73–80. [Google Scholar]
- Boley, M.; Fetzer, F.; Weber, R.; Graf, T. Statistical evaluation method to determine the laser welding depth by optical coherence tomography. Opt. Lasers Eng. 2019, 119, 56–64. [Google Scholar] [CrossRef]
- Zou, J.; He, Y.; Wu, S.; Huang, T.; Xiao, R. Experimental and theoretical characterization of deep penetration welding threshold induced by 1-μm laser. Appl. Surf. Sci. 2015, 357, 1522–1527. [Google Scholar] [CrossRef]
- Nassif, N.; Cense, B.; Park, B.; Pierce, M.; Yun, S.; Bouma, B.; Tearney, G.; Chen, T.; De Boer, J. In vivo high-resolution video-rate spectral-domain optical coherence tomography of the human retina and optic nerve. Opt. Express 2004, 12, 367–376. [Google Scholar] [CrossRef]
- Wang, R.K.; Ma, Z. A practical approach to eliminate autocorrelation artefacts for volume-rate spectral domain optical coherence tomography. Phys. Med. Biol. 2006, 51, 3231. [Google Scholar] [CrossRef]
- Schmitt, J.M.; Xiang, S.; Yung, K.M. Speckle in optical coherence tomography. J. Biomed. Opt. 1999, 4, 95–105. [Google Scholar] [CrossRef] [PubMed]
- Leitgeb, R.; Hitzenberger, C.; Fercher, A.F. Performance of fourier domain vs. time domain optical coherence tomography. Opt. Express 2003, 11, 889–894. [Google Scholar]
- Boley, M.; Webster, P.; Heider, A.; Weber, R.; Graf, T. Investigating the keyhole behavior by using x-ray and optical depth measurement techniques. In Proceedings of the International Congress on Applications of Lasers & Electro-Optics, San Jose, CA, USA, 8–13 June 2014; pp. 426–430. [Google Scholar]
- Wang, H.; Bah, M.J.; Hammad, M. Progress in outlier detection techniques: A survey. IEEE Access 2019, 7, 107964–108000. [Google Scholar] [CrossRef]
- Breunig, M.M.; Kriegel, H.-P.; Ng, R.T.; Sander, J. LOF: Identifying density-based local outliers. In Proceedings of the 2000 ACM SIGMOD International Conference on Management of Data, Dallas, TX, USA, 15–18 May 2000; pp. 93–104. [Google Scholar]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 226–231. [Google Scholar]
- Duin, R.P.; Haringa, H.; Zeelen, R. Fast percentile filtering. Pattern Recognit. Lett. 1986, 4, 269–272. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | C | Si | Mn | P | S | Cr | Ni | Cu | Fe |
|---|---|---|---|---|---|---|---|---|---|
| Mass fraction /% | 0.18 | 0.25 | 0.5 | 0.016 | 0.018 | 0.01 | 0.01 | 0.01 | Others |
| Percentile Filter | LOF + Percentile Filter | DBSCAN + Percentile Filter | |
|---|---|---|---|
| Average error (%) | 4.4 | 3.9 | 3.3 |
| Processing time (ms) | 183 | 457 | 581 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, G.; Wang, S.; Zhang, Y.; Hu, B.; Fu, Y.; Yu, Q.; Li, Y. An Efficient Method for Laser Welding Depth Determination Using Optical Coherence Tomography. Sensors 2023, 23, 5223. https://doi.org/10.3390/s23115223
Xie G, Wang S, Zhang Y, Hu B, Fu Y, Yu Q, Li Y. An Efficient Method for Laser Welding Depth Determination Using Optical Coherence Tomography. Sensors. 2023; 23(11):5223. https://doi.org/10.3390/s23115223
Chicago/Turabian StyleXie, Guanming, Sanhong Wang, Yueqiang Zhang, Biao Hu, Yu Fu, Qifeng Yu, and You Li. 2023. "An Efficient Method for Laser Welding Depth Determination Using Optical Coherence Tomography" Sensors 23, no. 11: 5223. https://doi.org/10.3390/s23115223