

Temperature Effects Removal from Non-Stationary Bridge–Vehicle Interaction Signals for ML Damage Detection

Abstract
:1. Introduction
- Level 1: Indication of damage existence (Detection);
- Level 2: Information of damage position (Localization);
- Level 3: Damage intensity (Assessment);
- Level 4: Prognosis (Remaining life prediction).
- (i)
- The structural health state may be lost during the data reduction procedure, which is specifically retrieved by FFT [8].
- (ii)
- FFT cannot identify the time dependence of the dynamic parameters, and when using signals from naturally excited structures, it is unable to capture the evolutionary traits that can be observed in these signals [9].
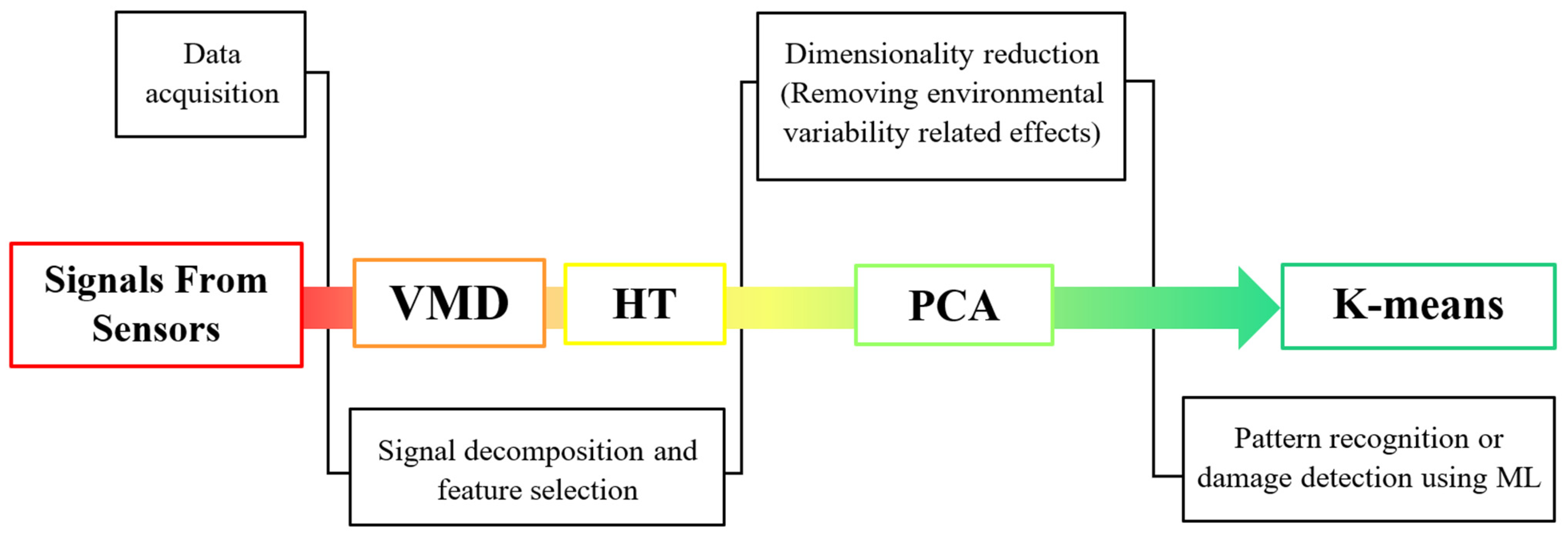
2. Damage Detection Method
- Acceleration records under traffic loads and at different ambient temperatures are collected from sensors.
- Variational mode decomposition (VMD) and Hilbert transform (HT) are applied to recorded data in order to choose a damage-sensitive feature for the following step. This step aims to deconstruct the non-stationary signal into intrinsic mode functions (IMFs). In this study, instantaneous frequency is considered as the relevant damage feature.
- Principal component analysis is performed to remove the environmental effects (temperature).
- Symbolic data analysis is performed, and a cluster-based moving window K-means algorithm is applied to selected scenarios for damage detection and localization.
- In the following subsections, the above-mentioned numerical tools are described in detail.
2.1. Variational Mode Decomposition (VMD)
2.2. Hilbert Transform (HT)
2.3. Clustering Algorithm
- Instances, in the same cluster, must be similar as much as possible.
- Instances, in the different clusters, must be different as much as possible.
- Measurement for similarity and dissimilarity must be clear and have practical meaning.
2.4. Damage Identification
3. Case Study
3.1. Description of the Concrete Bridge Model
3.2. Damage Scenarios and Sensors
3.3. Loading
- −
- The first, second, and third bending modes are selected;
- −
- The Rayleigh damping coefficients are α = 0.1654 and β = 5.4333 × 10−6;
- −
- The vehicle velocity is 10 m/s;
- −
- A sampling frequency of fs = 400 Hz in the virtual sensors, a time step in the time domain analysis of Δ𝑡 = 0.001 s, a final time step Tf = 2 s (time to cross the bridge), and a total number of time samples of 800 are considered.
Simulation of Temperature
3.4. Results and Discussion
- UND, T = −15 °C, D0%;
- UND, T = 20 °C, D0%;
- DMG3, T = 20 °C, D90%;
- DMG3, T = −15 °C, D90%.
3.4.1. VMD
3.4.2. Hilbert Transform
3.4.3. Application of PCA (Eliminating Environmental Effects)
3.4.4. K-Means
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gkoumas, K.; Santos, F.L.M.D.; van Balen, M.; Tsakalidis, A.; Hortelano, A.O.; Grosso, M.; Haq, G.; Pekár, F. Research and Innovation in Bridge Maintenance, Inspection and Monitroing—A European Perspective Based on the Transport Research and Innovation Monitoring Information System (TRIMIS); Publications Office of the European Union: Luxembourg, 2019. [Google Scholar]
- Rania, N.; Coppola, I.; Martorana, F.; Migliorini, L. The collapse of the Morandi Bridge in Genoa on 14 August 2018: A collective traumatic event and its emotional impact linked to the place and loss of a symbol. Sustainability 2019, 11, 6822. [Google Scholar] [CrossRef]
- Rytter, A. Vibrational Based Inspection of Civil Engineering Structures; Department of Building Technology and Structural Engineering, Aalborg University: Aalborg, Denmark, 1993. [Google Scholar]
- Malekloo, A.; Ozer, E.; Al Hamaydeh, M.; Girolami, M. Machine learning and structural health monitoring overview with emerging technology and high-dimensional data source highlights. Struct. Health Monit. 2021, 21, 1906–1955. [Google Scholar] [CrossRef]
- Zhang, F.-L.; Yang, Y.; Xiong, J.-H.; Yu, Z. Structural health monitoring of a 250-m super-tall building and operational modal analysis using the fast Bayesian FFT method. Struct. Control Health Monit. 2019, 26, 23–83. [Google Scholar] [CrossRef]
- Yesilyurt, I.; Gursoy, H. Estimation of elastic and modal parameters in composites using vibration analysis. J. Vib. Control 2015, 21, 509–524. [Google Scholar] [CrossRef]
- Chen, B.; Zhao, S.-L.; Li, P.-Y. Application of Hilbert-Huang transform in structural health monitoring: A state-of-the-art review. Math. Probl. Eng. 2014, 2014, 317954. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Sun, H.M. Multi-stage structural damage diagnosis method based on energy-damage theory. Smart Struct. Syst. 2013, 12, 345–361. [Google Scholar] [CrossRef]
- Gurley, K.; Kareem, A. Applications of wavelet transforms in earthquake, wind and ocean engineering. Eng. Struct. 1999, 21, 149–167. [Google Scholar]
- Xu, Y.L.; Chen, B. Integrated vibration control and health monitoring of building structures using semi-active friction dampers. Part I: Methodology. Eng. Struct. 2008, 30, 1789–1801. [Google Scholar] [CrossRef]
- Chen, B.; Xu, Y.L. Integrated vibration control and health monitoring of building structures using semi-active friction dampers. Part II: Numerical investigation. Eng. Struct. 2008, 30, 573–587. [Google Scholar] [CrossRef]
- Mostafa, N.; Di Maio, D.; Loendersloot, R.; Tinga, T. Extracting the time-dependent resonances of a vehicle–bridge interacting system by wavelet synchrosqueezed transform. Struct. Control Health Monit. 2021, 28, e2833. [Google Scholar] [CrossRef]
- Santos, J.; Crémona, C.; Orcesi, A.D.; Silveira, P. Multivariate statistical analysis for early damage detection. Eng. Struct. 2013, 56, 273–285. [Google Scholar] [CrossRef]
- Wah, W.S.L.; Chen, Y.-T.; Elamin, A.; Roberts, G.W. Damage detection under temperature conditions using PCA—An application to the Z24 Bridge. Proc. Inst. Civ. Eng. Struct. Build. 2022, 175, 890–902. [Google Scholar]
- Tenelema, F.J.; Delgadillo, R.M.; Casas, J.R. Bridge damage detection and quantification under environmental effects by Principal Component Analysis. In Proceedings of the 1st Conference of the European Association on Quality Control of Bridges and Structures—EUROSTRUCT 2021, Padua, Italy, 28 August–1 September 2021; LNCE Series; Springer: Cham, Switzerland, 2022; Volume 200, pp. 183–190. [Google Scholar]
- Delgadillo, R.M.; Casas, J.R. Bridge damage detection via Improved Completed Ensemble EMD with Adaptive Noise and machine learning algorithms. Struct. Control Health Monit. 2022, 29, e2966. [Google Scholar] [CrossRef]
- Wang, X.; Gao, Q.; Liu, Y. Damage Detection of Bridges under Environmental Temperature Changes Using a Hybrid Method. Sensors 2020, 20, 3999. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-B.; Yi, T.-H.; Li, H.-N.; Liu, H. Strain-Based Performance Warning Method for Bridge Main Girders under Variable Operating Conditions. J. Bridge Eng. 2020, 25, 04020013. [Google Scholar] [CrossRef]
- Meixedo, A.; Santos, J.; Ribeiro, D.; Calçada, R.; Todd, M. Damage detection in railway bridges using traffic-induced dynamic responses. Eng. Struct. 2021, 238, 112189. [Google Scholar] [CrossRef]
- Meixedo, A.; Santos, J.; Ribeiro, D.; Calçada, R.; Todd, M.D. Online unsupervised detection of structural changes using train–induced dynamic responses. Mech. Syst. Signal Process. 2022, 165, 108268. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Yu, K. Steady-State Data Baseline Model for Nonstationary Monitoring Data of Urban Girder Bridges. Sustainability 2022, 14, 12134. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, D.-H.; Yi, T.-H. Displacement model error-based method for symmetrical cable-stayed bridge performance warning after eliminating variable load effects. J. Civ. Struct. Health Monit. 2021, 12, 81–99. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Bagheri, A.; Ozbulut, E.O.; Harris, K.D. Structural system identification based on variational mode. J. Sound Vib. 2018, 417, 182–197. [Google Scholar] [CrossRef]
- Muñoz, F.J.T. Bridge Damage Identification under Operational and Environmental Variability. Master’s Thesis, Department of Civil and Environmental Engineering, UPC, Barcelona, Spain, 2020. [Google Scholar]
- Zhang, M.; Jiang, Z.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Signal Process. 2017, 93, 460–493. [Google Scholar] [CrossRef]
- Liu, S.; Tang, G.; Wang, X. Time frequency analysis method for rotary mechanical fault based on improved variational mode decomposition. J. Vib. Eng. 2016, 29, 1119–1126. [Google Scholar]
- Wu, S.; Feng, F.; Zhu, J.; Wu, C.; Zhang, G. A Method for Determining Intrinsic Mode Function Number in Variational Mode Decomposition and Its Application to Bearing Vibration Signal Processing. Shock Vib. 2020, 2020, 8304903. [Google Scholar] [CrossRef]
- Pines, D.; Salvino, L. Health Monitoring of One Dimensional Structures Using Empirical Mode Decomposition and the Hilbert-Huang Transform. Proc. SPIE Int. Soc. Opt. Eng. 2002, 4701, 127–143. [Google Scholar]
- Cohen, L. Time-Frequency Analysis; Prentice Hall: Hoboken, NJ, USA, 1995. [Google Scholar]
- Santos, J.P.; Crémona, C.; Calado, L.; Silveira, P.; Orcesi, A.D. On-line unsupervised detection of early damage. Struct. Control. Health Monit. 2016, 23, 1047–1069. [Google Scholar] [CrossRef]
- Xu, D.; Tian, Y. A Comprehensive Survey of Clustering Algorithms. Ann. Data Sci. 2015, 2, 165–193. [Google Scholar] [CrossRef]
- Santos, J.P. Smart Structural Health Monitoring Techniques for Novelty Identification in Civil Engineering Structures. Ph.D. Thesis, University of Lisbon, Lisbon, Portugal, 2014. [Google Scholar]
- Tatsis, K.; Chatzi, E. A Numerical Benchmark for System Identification under Operational and Environmental Variability. In Proceedings of the 8th International Operational Modal Analysis Conference (IOMAC 2019), Copenhagen, Denmark, 13–15 May 2019. [Google Scholar]
- Jiao, Y.; Liu, H.; Wang, X.; Zhang, Y.; Luo, G.; Gong, Y. Temperature Effect on Mechanical Properties and Damage Identification of Concrete Structure. Adv. Mater. Sci. Eng. 2014, 2014, 191360. [Google Scholar] [CrossRef]
- MATLAB. k-Means Clustering. Available online: https://it.mathworks.com/help/stats/kmeans.html#d123e555240 (accessed on 1 January 2023).
- Wah, W.S.L.; Chen, Y.-T.; Roberts, G.W.; Elamin, A. Separating damage from environmental effects affecting civil structures for near real-time damage detection. Struct. Health Monit. 2018, 17, 850–868. [Google Scholar]
- Mujica, L.E.; Rodellar, J.; Fernandez, A.; Guemes, A. Q-statistic and T2-statistic PCA-based measures for damage assessment in structures. Struct. Health Monit. 2011, 10, 539–553. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometry (Units) | Symbol | Value |
|---|---|---|
| Left-span length (m) | L1 | 10 |
| Right-span length (m) | L2 | 10 |
| Total bridge length (m) | L | 20 |
| Bridge height (m) | h | 0.6 |
| Bridge width (m) | t | 10 |
| Mass density (kg/m3) | ρ | 2400 |
| Young’s modulus (GPa) | 35 | |
| Poisson’s ratio | ν | 0.2 |
| Shear modulus (GPa) | 14.6 | |
| Stiffness (Units) | Left Support | Mid Support | Right Support |
|---|---|---|---|
| kx (N/m) | 10,714,200 | 19,285,500 | 10,714,200 |
| ky (N/m) | 1015 | 1020 | 1015 |
| Sensor | Characteristics | Position on the Beam Neutral Axis (y = 0.3 m) |
|---|---|---|
| S-01 | ¼ L1 from left-hand support | x = 2.5 m |
| S-02 | ½ L1 from left-hand support | x = 5.0 m |
| S-03 | ¾ L1 from left-hand support | x = 7.5 m |
| S-04 | ¾ L2 from right-hand support | x = 12.5 m |
| S-05 | ½ L2 from right-hand support | x = 15.0 m |
| S-06 | ¼ L2 from right-hand support | x = 17.5 m |
| Damage Scenarios | Damaged Elements | Location of Damage |
|---|---|---|
| Undamaged Scenario (UND) | 0 | |
| Damage Scenario 1 (DMG1) | 2 | At 1/2 L1 from left-hand support, starting from the bottommost edge |
| Damage Scenario 2 (DMG2) | 4 | |
| Damage Scenario 3 (DMG3) | 6 | |
| Damage Scenario 4 (DMG4) | 2 | At L1 from left-hand support, starting from the uppermost edge |
| Damage Scenario 5 (DMG5) | 4 | |
| Damage Scenario 6 (DMG6) | 6 |
| Parameters | S01 | S02 | S03 | S04 | S05 | S06 |
|---|---|---|---|---|---|---|
| Number of modes, K | 6 | 5 | 6 | 6 | 5 | 6 |
| Penalty factor, α | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 |
| Fidelity coefficient, 𝜏 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | |
| 100,000 | 100,000 | 100,000 | 100,000 | 100,000 | 100,000 |
| “cluster” | Perform a preliminary clustering phase on a random 10% subsample of X when the number of observations in the subsample is greater than k. This preliminary phase is itself initialized using “sample”. If the number of observations in the random 10% subsample is less than k, then the software selects k observations from X at random. |
| “plus” (default) | Select k seeds by implementing the k-means++ algorithm for cluster center initialization. |
| “sample” | Select k observations from X at random. |
| “uniform” | Select k points uniformly at random from the range of X. Not valid with the Hamming distance. |
| “numeric matrix” | k-by-p matrix of centroid starting locations. The rows of Start correspond to seeds. The software infers k from the first dimension of Start, so you can pass in [] for k. |
| “numeric array” | k-by-p-by-r array of centroid starting locations. The rows of each page correspond to seeds. The third dimension invokes replication of the clustering routine. Page j contains the set of seeds for replicate j. The software infers the number of replicates (specified by the “Replicates” name-value pair argument) from the size of the third dimension. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niyozov, S.; Domaneschi, M.; Casas, J.R.; Delgadillo, R.M. Temperature Effects Removal from Non-Stationary Bridge–Vehicle Interaction Signals for ML Damage Detection. Sensors 2023, 23, 5187. https://doi.org/10.3390/s23115187
Niyozov S, Domaneschi M, Casas JR, Delgadillo RM. Temperature Effects Removal from Non-Stationary Bridge–Vehicle Interaction Signals for ML Damage Detection. Sensors. 2023; 23(11):5187. https://doi.org/10.3390/s23115187
Chicago/Turabian StyleNiyozov, Sardorbek, Marco Domaneschi, Joan R. Casas, and Rick M. Delgadillo. 2023. "Temperature Effects Removal from Non-Stationary Bridge–Vehicle Interaction Signals for ML Damage Detection" Sensors 23, no. 11: 5187. https://doi.org/10.3390/s23115187