

Improved 3D Pavement Texture Reconstruction Method Based on Interference Fringe via Optimizing the Post-Processing Method


Abstract
:1. Introduction
2. The System of 3D-PTRIF
2.1. The Implementation of 3D-PTRIF
2.2. The Operational Process of 3D-PTRIF
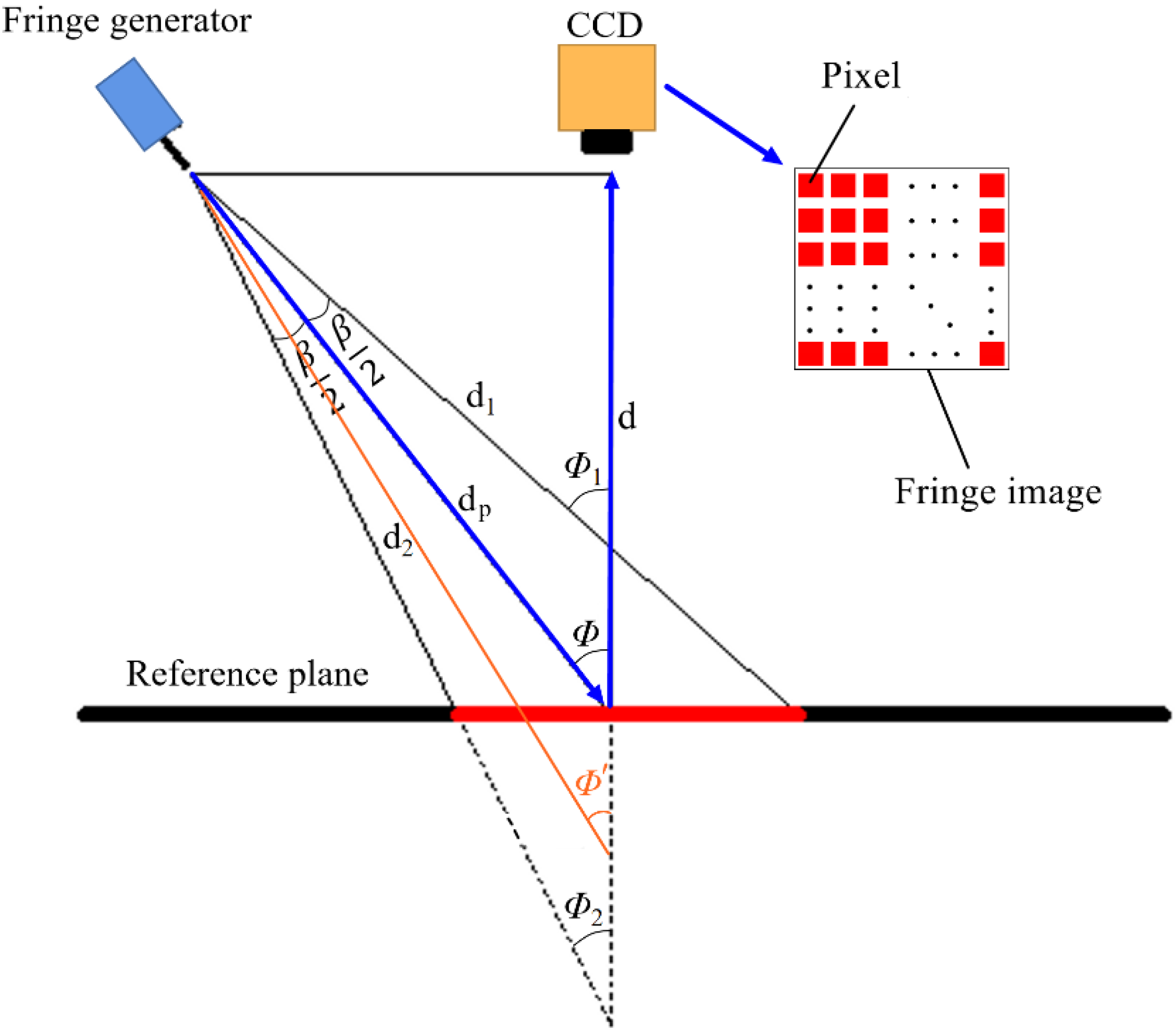
3. The Influence of Unequal Laser Incident Angles
3.1. The Relationship between the Texture Depth Data and the Laser Incident Angle
3.2. The Influence of Unequal Incident Angles on the Calculation of Texture Depth
4. The Optimization for Post-Processing
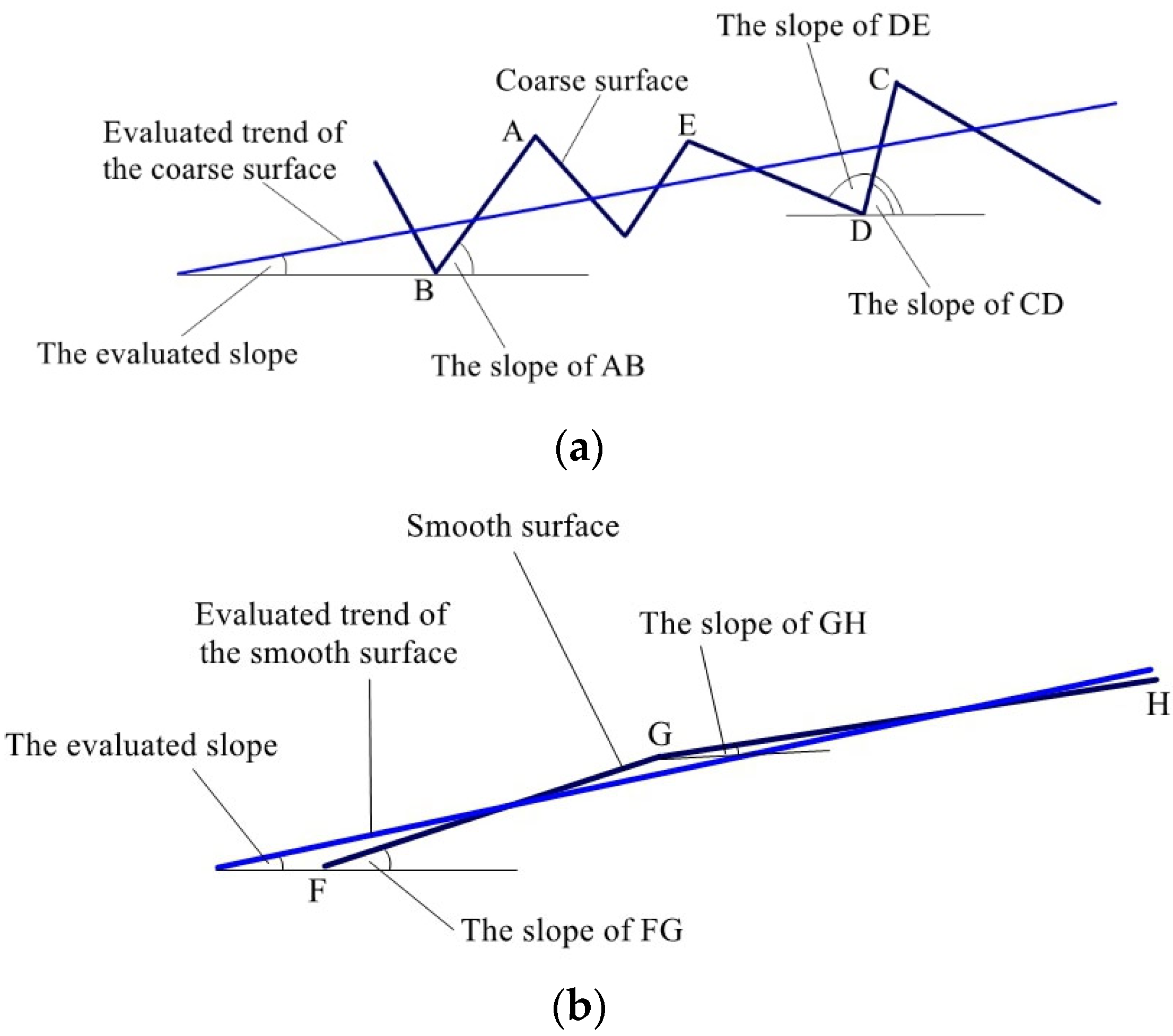
4.1. The Traditional Post-Processing Method
4.2. The Optimized Post-Processing Method
- (1)
- The reason for optimization
- (2)
- The method of optimization
5. Validation of the Optimized Post-Processing Method
5.1. Standard Component of Texture Depth
5.2. Asphalt Pavement Surface
5.3. Cement Pavement Surface
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chu, C.; Wang, L.; Xiong, H. A review on pavement distress and structural defects detection and quantification technologies using imaging approaches. J. Traffic Transp. Eng. 2021, 61, 2095–7564. [Google Scholar] [CrossRef]
- Takeda, M.; Mutoh, K. Fourier transform profilometry for the automatic measurement 3-D object shapes. Appl. Opt. 1983, 22, 3977–3982. [Google Scholar] [CrossRef] [PubMed]
- Fischer, E.W.; Sodnik, Z.; Ittner, T.; Tiziani, H.J. Dual-wavelength heterodyne interferometry for rough-surface measurements. Proc. SPIE–Int. Soc. Opt. Eng. 1990, 1319, 570–571. [Google Scholar] [CrossRef]
- Sodnik, Z.; Fischer, E.; Ittner, T.; Tiziani, H.J. Two-wavelength double heterodyne interferometry using a matched grating technique. Appl. Opt. 1991, 30, 3139–3144. [Google Scholar] [CrossRef] [PubMed]
- Fischer, E.W.; Ittner, T.; Dalhoff, E.; Sodnik, Z.; Tiziani, H.J. Dual Wavelength Heterodyne Interferometry Using a Matched Grating Set-Up; University of Stuttgart: Stuttgart, Germany, 1992. [Google Scholar]
- Tiziani, H.; Rothe, A.; Maier, N. Dual-wavelength heterodyne differential interferometer for high-precision measurements of reflective aspherical surfaces and step heights. Appl. Opt. 1996, 35, 3525–3533. [Google Scholar] [CrossRef]
- Yamamoto, A.; Yamaguchi, I.; Yano, M. Surface shape measurement of tilted surfaces by wavelength scanning interferometry. Proc. SPIE–Int. Soc. Opt. Eng. 1999, 3745, 32–39. [Google Scholar] [CrossRef]
- Bone, D.J. Fourier fringe analysis: The two-dimensional phase unwrapping problem. Appl. Opt. 1991, 30, 3627–3632. [Google Scholar] [CrossRef]
- Su, X.; Chen, W. Fourier transform profilometry: A review. Opt. Lasers Eng. 2001, 35, 263–284. [Google Scholar] [CrossRef]
- Mao, X.; Chen, W.; Su, X. Improved fourier-transform profilometry. Appl. Opt. 2007, 46, 664–668. [Google Scholar] [CrossRef]
- Li, S.; Chen, W.; Su, X. Reliability-guided phase unwrapping in wavelet-transform profilometry. Appl. Opt. 2008, 47, 3369–3377. [Google Scholar] [CrossRef]
- Xian, T.; Su, X. Area modulation grating for sinusoidal structure illumination on phase-measuring profilometry. Appl. Opt. 2001, 40, 1201–1206. [Google Scholar] [CrossRef] [PubMed]
- Lally, E.; Gong, J.; Wang, A. Method of multiple references for 3d imaging with fourier transform interferometry. Opt. Express 2010, 18, 17591–17596. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Wang, L.; Lally, E. Application of Ladar in the Analysis of Aggregate Characteristics (NCHRP Report 724); Transportation Research Board of the National Academics: Washington, DC, USA, 2012. [Google Scholar]
- Duan, X. Research on Technologies of Structured Light 3D-PTM Based on Fiber Optic Interference Fringe Projection. Ph.D. Thesis, Tianjin University, Tianjin, China, 2013. [Google Scholar]
- Chu, C.; Yang, H.; Wang, L. Design of a pavement scanning system based on structured light of interference fringe. Measurement 2019, 145, 410–418. [Google Scholar] [CrossRef]
- Awed, A.M.; Tarbay, E.W.; El-Badawy, S.M.; Azam, A.M. Performance characteristics of asphalt mixtures with industrial waste/by-product materials as mineral fillers under static and cyclic loading. Road Mater. Pavement Des. 2020, 23, 335–357. [Google Scholar] [CrossRef]
- Zhang, K.; Liang, Y.; Li, G. An Accelerated Algorithm for 3D Reconstruction of Groove Structure Based on Parallel Light and White Light Interference. In Proceedings of the International Conference of Optical Imaging and Measurement, Xi’an, China, 27–29 August 2021. [Google Scholar]
- Chu, C.; Wang, L.; Yang, H. An optimized fringe generator of 3d pavement profilometry based on laser interference fringe–sciencedirect. Opt. Lasers Eng. 2020, 136, 106142. [Google Scholar] [CrossRef]
- Chu, C.; Wang, L.; Yang, H.; Tang, X.; Chen, Q. Calibration and system error evaluation of a high-accuracy 3d pavement profilometer based on interference fringe. J. Instrum. 2020, 15, P08003. [Google Scholar] [CrossRef]
- Yan, C.; Wei, Y.; Xiao, Y.; Wang, L. Pavement 3D data denoising algorithm based on cell meshing ellipsoid detection. Sensor 2021, 21, 212310. [Google Scholar] [CrossRef]
- Pennington, T.L.; Xiao, H.; May, R.; Wang, A. Miniaturized 3-D surface profilometer using a fiber optic coupler. Opt. Laser Technol. 2001, 33, 313–320. [Google Scholar] [CrossRef]
- Pennington, T. Miniaturized 3-D Mapping System Using a Fiber Optic Coupler as a Young’s Double Pinhole Interferometer. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2000. [Google Scholar]
- Pennington, T.L.; Wang, A.; Xaio, H.; May, R. Manufacturing of a fiber optic young’s double pinhole interferometer for use as a 3-D profilometer. Opt. Express 2000, 6, 196–201. [Google Scholar] [CrossRef] [PubMed]
- Li, D.-M.; Zhang, L.-J.; Yang, J.-H.; Su, W. Research on wavelet-based contourlet transform algorithm for adaptive optics image denoising. Opt.–Int. J. Light Electronn Opt. 2016, 127, 5029–5034. [Google Scholar] [CrossRef]
- Wei, Y.; Yan, C.; Xiao, Y.; Wang, L. Methodology for quantifying features of early-age concrete cracking from laser scanned 3D data. J. Mater. Civ. Eng. 2021, 33, 04021151. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Point Number | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | … | 800 | ||
| The traditional method | Depth (mm) | −1.4196 | −1.4165 | −1.4135 | … | −2.1009 |
| Average Slope | −0.0016 | |||||
| The optimized method | Depth (mm) | −1.9059 | −1.9048 | −1.9036 | … | −2.0085 |
| Average Slope | −4.9598 × 10−4 | |||||
| The decrease in the slope | 69.00% | |||||
| Method | Selected Lines | |||||
|---|---|---|---|---|---|---|
| AB | CD | EF | GH | IJ | ||
| Using the traditional method | Slope | −9.4531 × 10−4 | −8.2163 × 10−4 | −6.4581 × 10−4 | −7.4953 × 10−4 | −8.5340 × 10−4 |
| Using the proposed method | Slope | −7.6484 × 10−4 | −6.6913 × 10−4 | −5.3011 × 10−4 | −6.1198 × 10−4 | −6.9828 × 10−4 |
| Decrease in slope | 19.09% | 18.56% | 17.92% | 18.35% | 18.18% | |
| Average decrease in slope | 18.42% | |||||
| Method | Selected Lines | |||||
|---|---|---|---|---|---|---|
| AB | CD | EF | GH | IJ | ||
| Using the traditional method | Slope | −0.0014 | −7.5465 × 10−4 | −0.0012 | −0.0017 | −0.0021 |
| Using the proposed method | Slope | −0.0012 | −6.5223 × 10−4 | −0.0010 | −0.0014 | −0.0018 |
| Decrease in slope | 14.29% | 13.57% | 16.67% | 17.65% | 14.29% | |
| Average decrease in slope | 15.29% | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, C.; Wei, Y.; Wang, H. Improved 3D Pavement Texture Reconstruction Method Based on Interference Fringe via Optimizing the Post-Processing Method. Sensors 2023, 23, 4660. https://doi.org/10.3390/s23104660
Chu C, Wei Y, Wang H. Improved 3D Pavement Texture Reconstruction Method Based on Interference Fringe via Optimizing the Post-Processing Method. Sensors. 2023; 23(10):4660. https://doi.org/10.3390/s23104660
Chicago/Turabian StyleChu, Chu, Ya Wei, and Haipeng Wang. 2023. "Improved 3D Pavement Texture Reconstruction Method Based on Interference Fringe via Optimizing the Post-Processing Method" Sensors 23, no. 10: 4660. https://doi.org/10.3390/s23104660