
A Spectral Encoding Simulator for Broadband Active Illumination and Reconstruction-Based Spectral Measurement

 , ,
, ,
Abstract
:1. Introduction
2. System Principle and Structures
2.1. System Principle
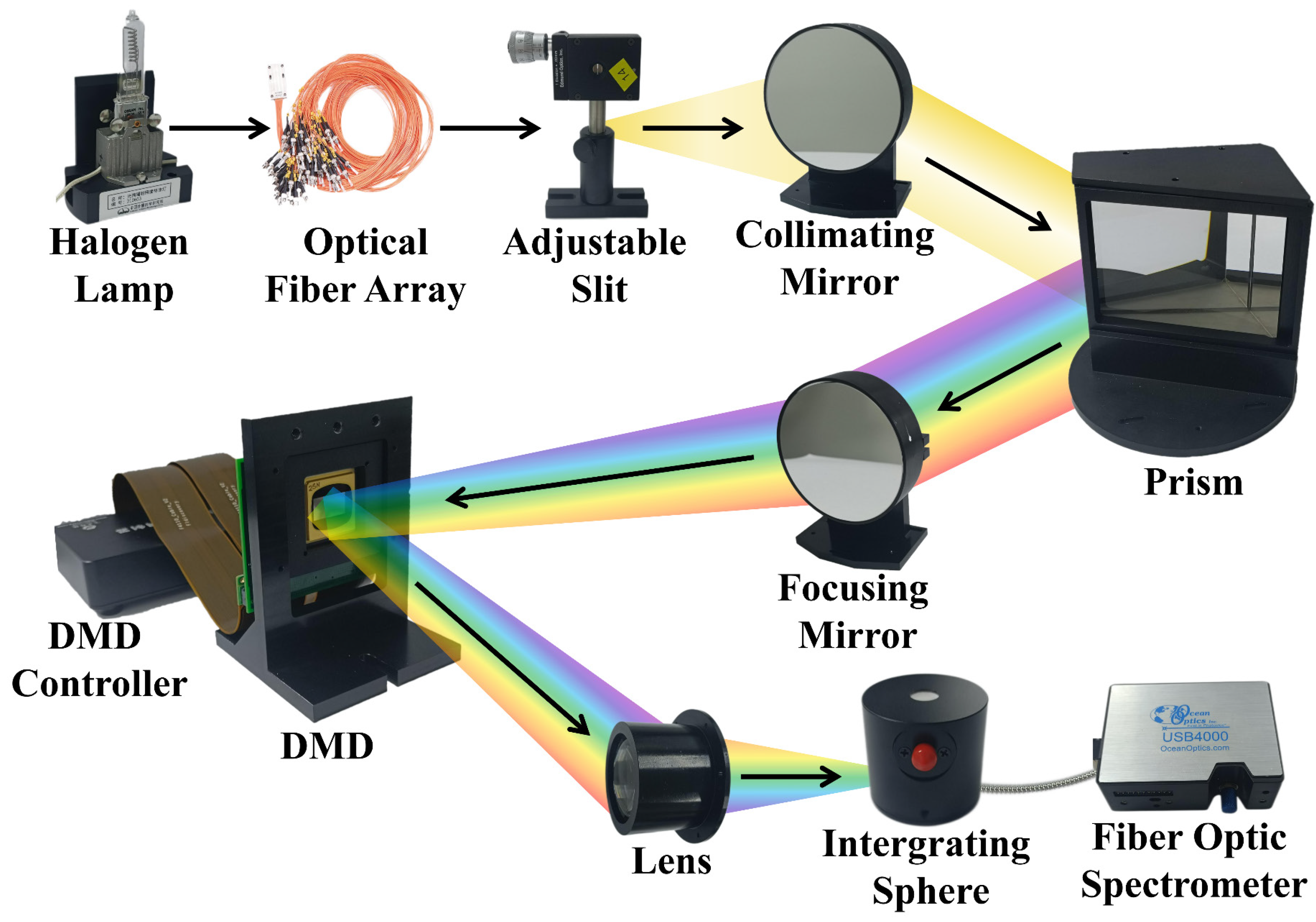
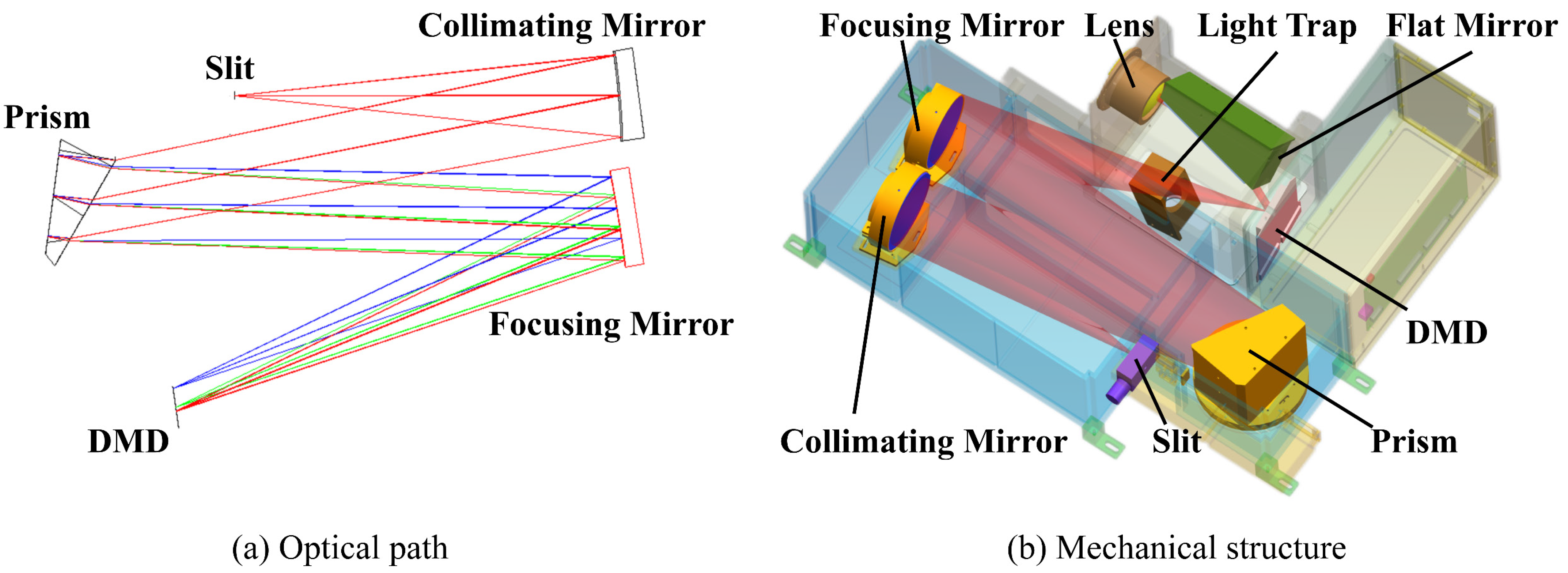
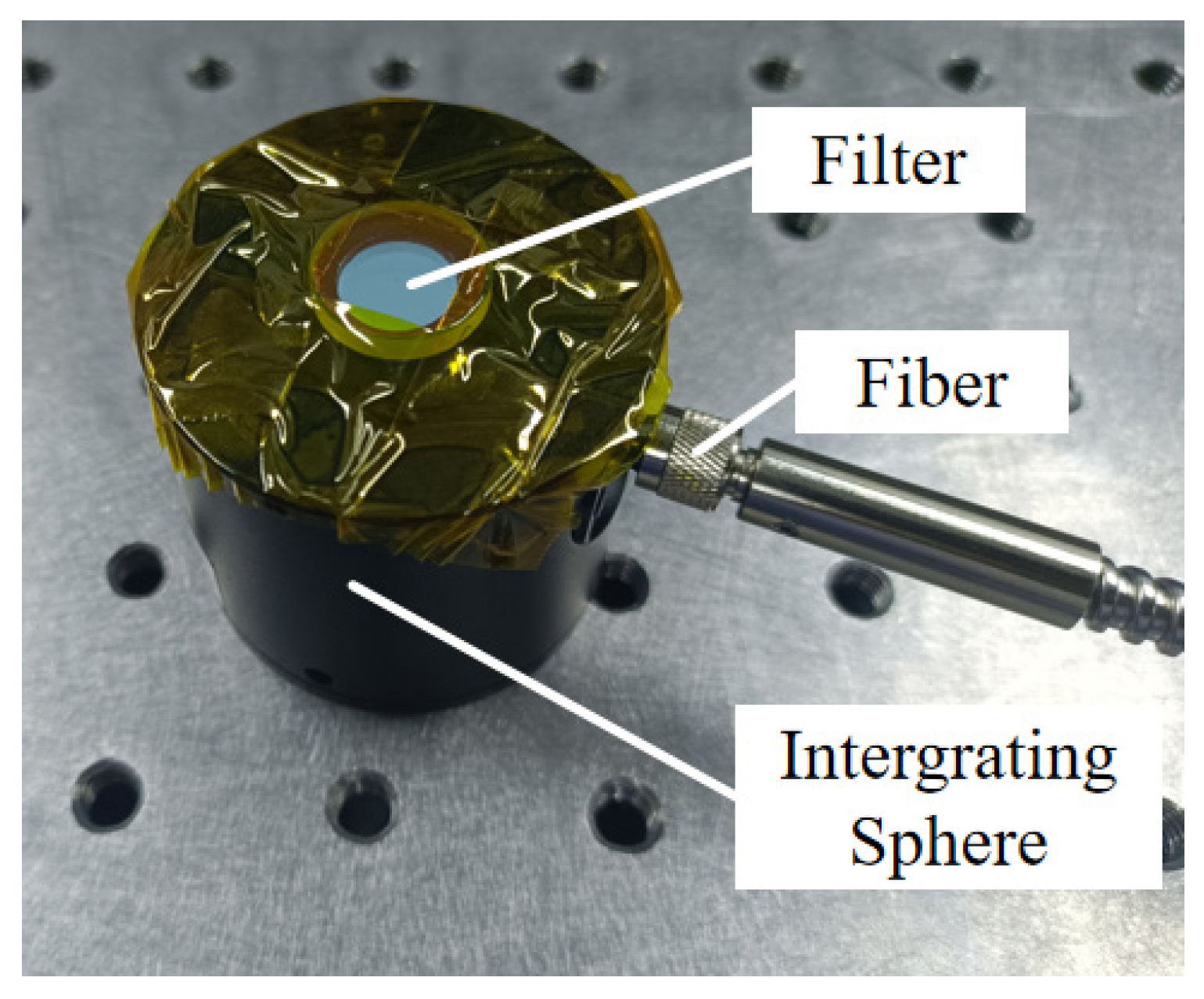
2.2. System Structure
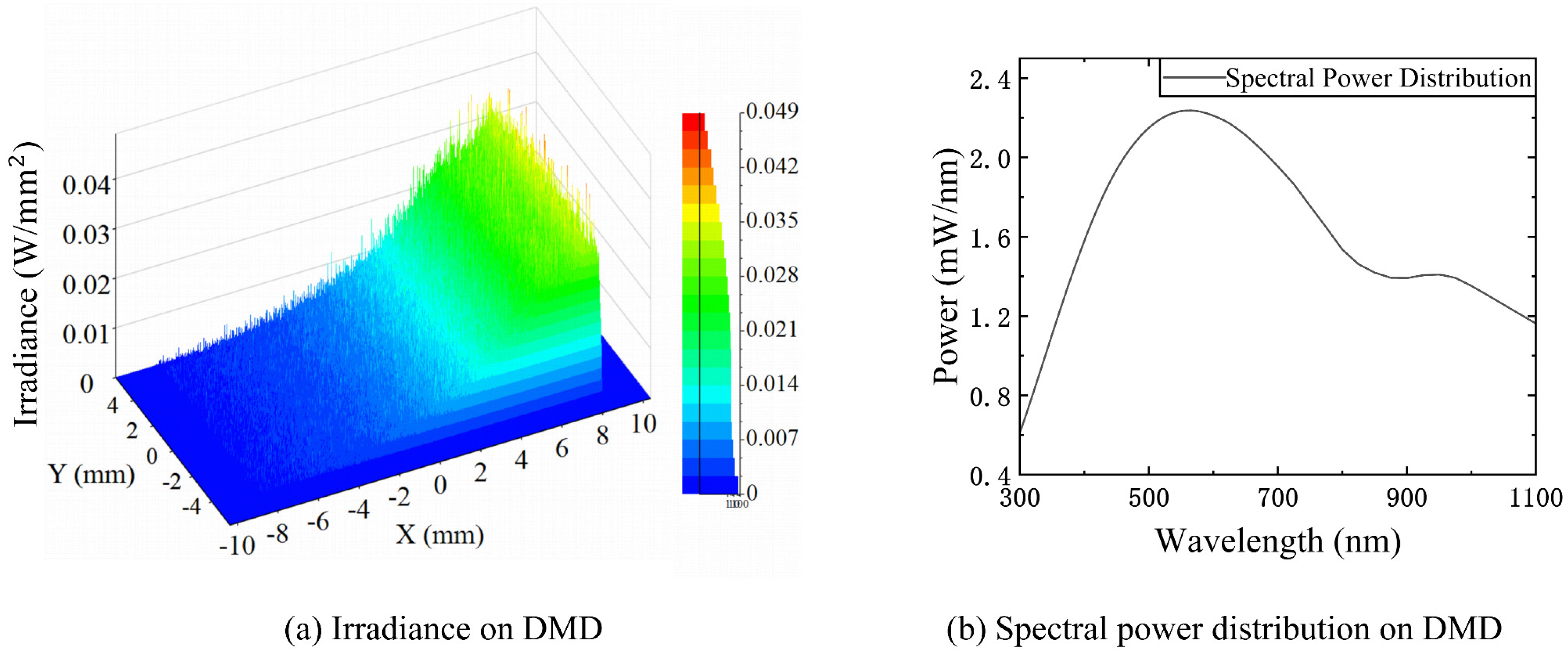
2.3. Optical Throughput of the System
3. Spectral Encoding Simulation Method and Model
3.1. Spectral Encoding Simulation Principle
3.2. Model of Spectral Response Function
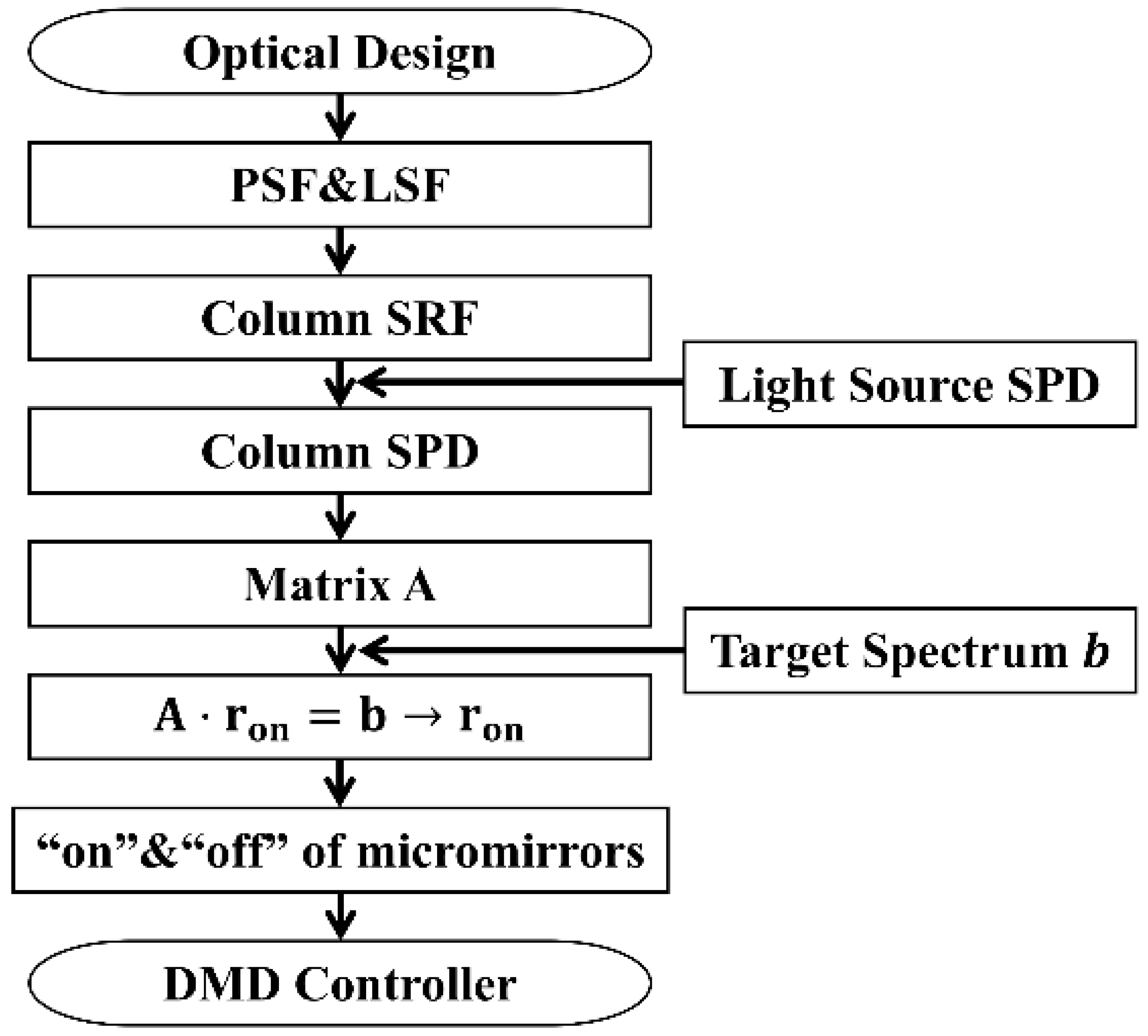
3.3. Spectral Encoding Simulation Method
4. Spectral Encoding Simulation Capability and Performance
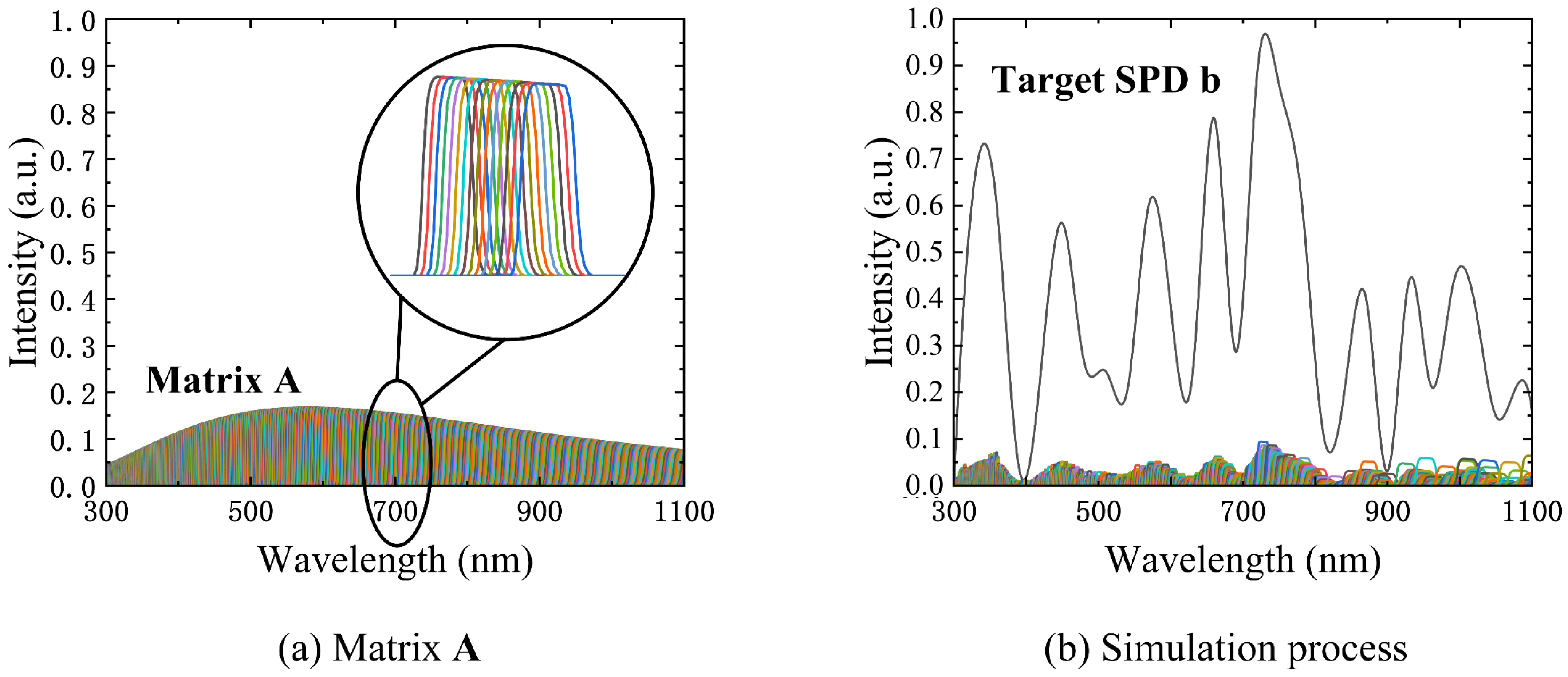
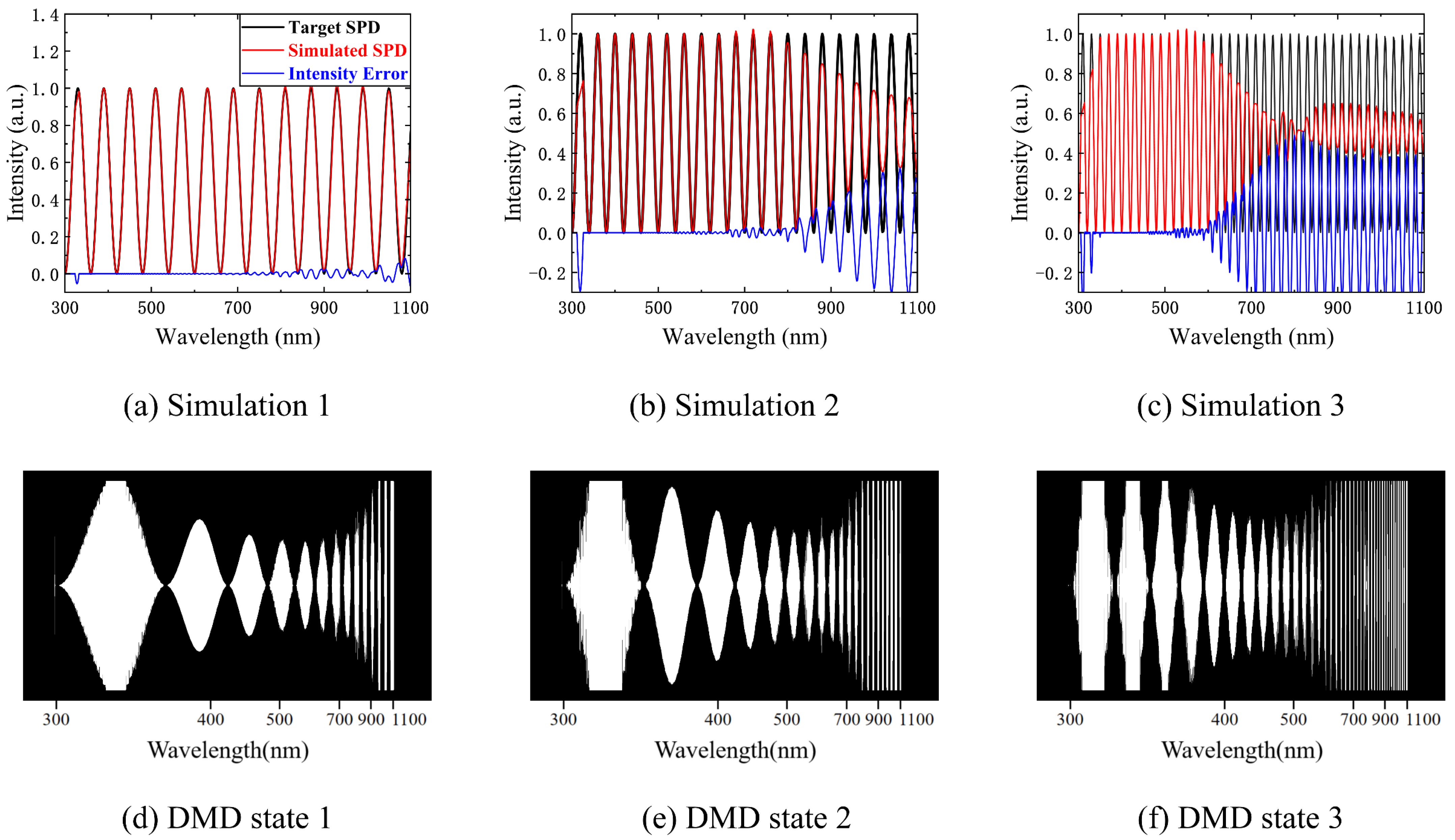
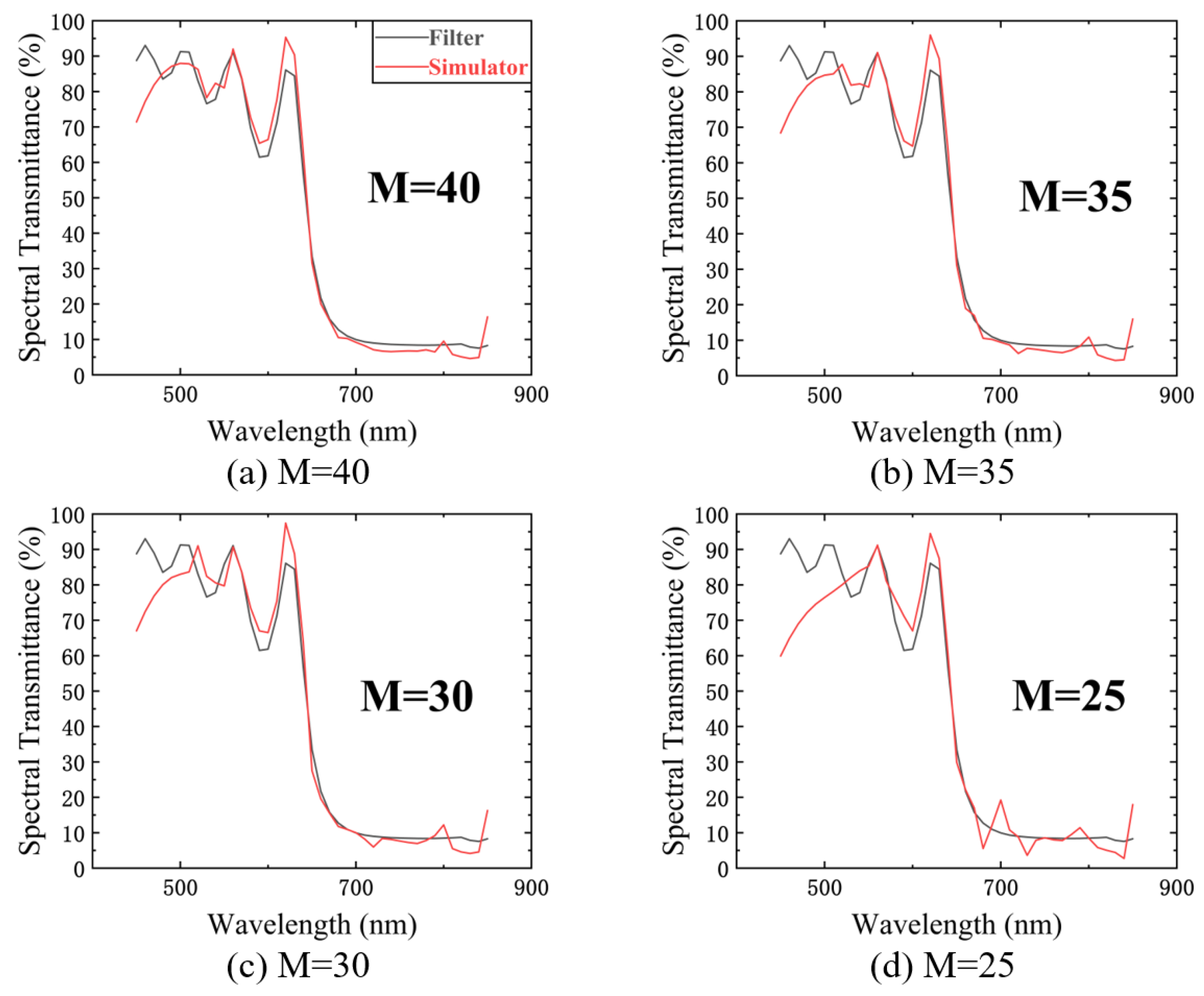
4.1. Spectral Encoding Simulation Capability
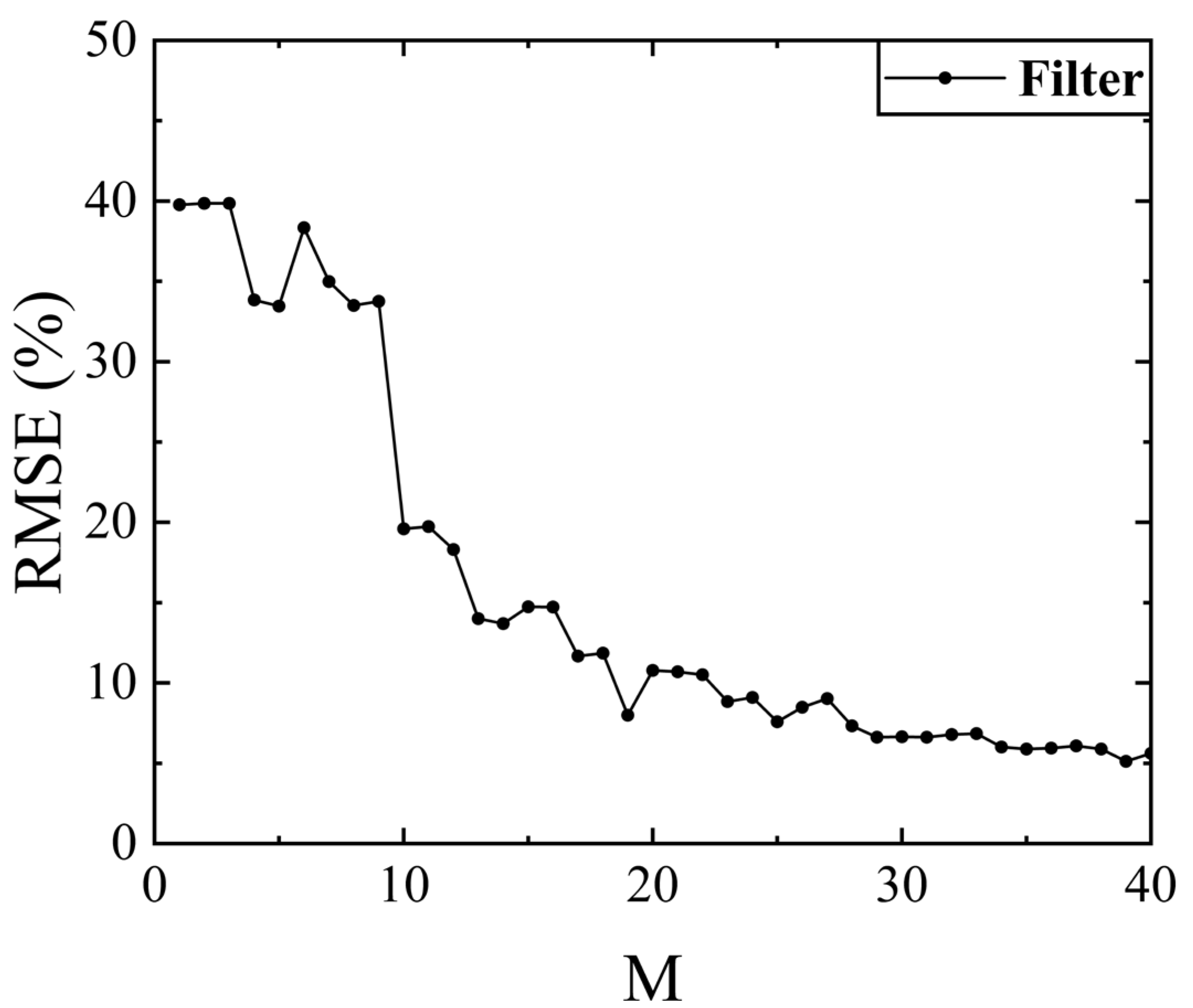
4.2. Spectral Encoding Simulation Performance
5. Applicability of the SES in Spectral Measurement
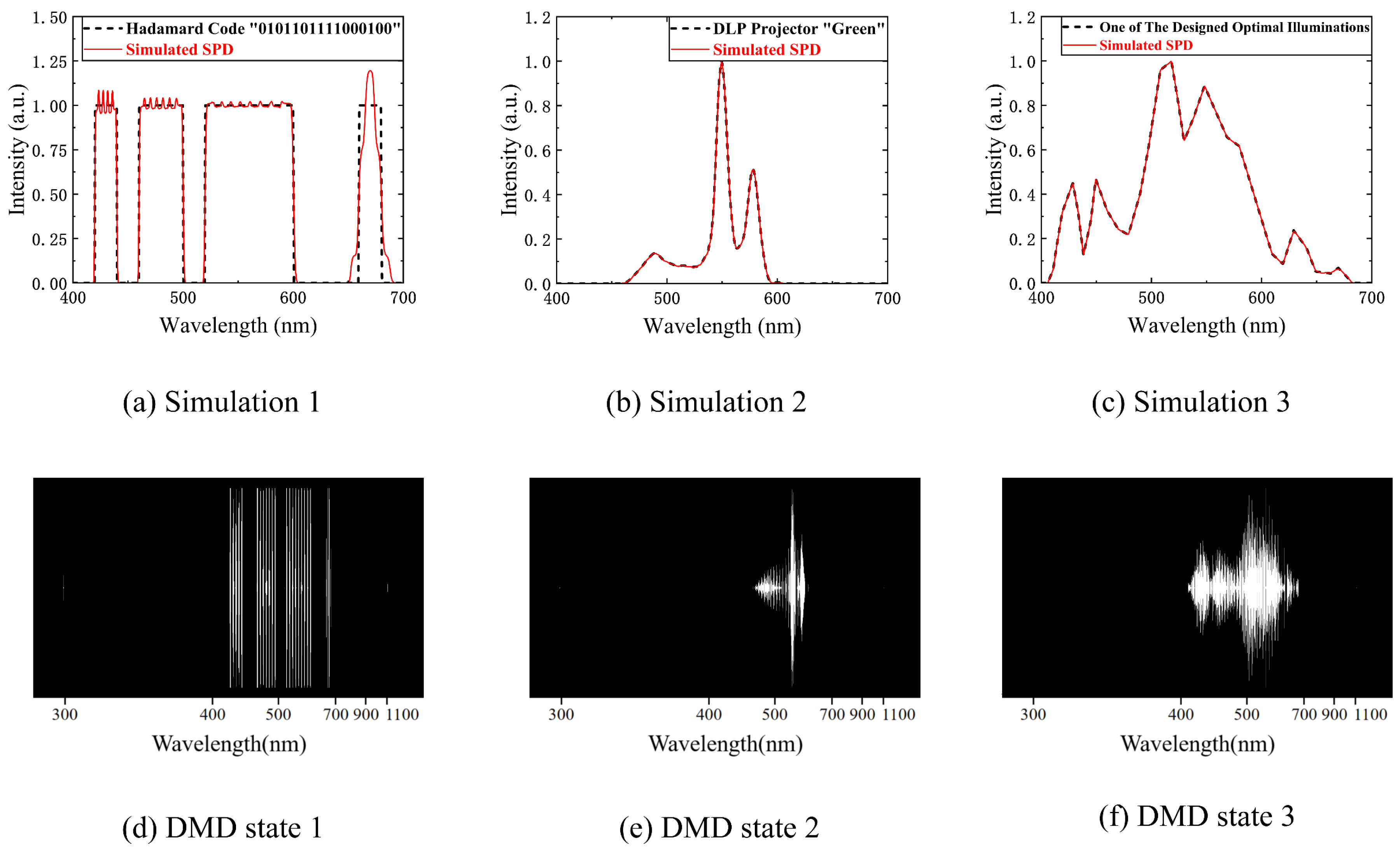
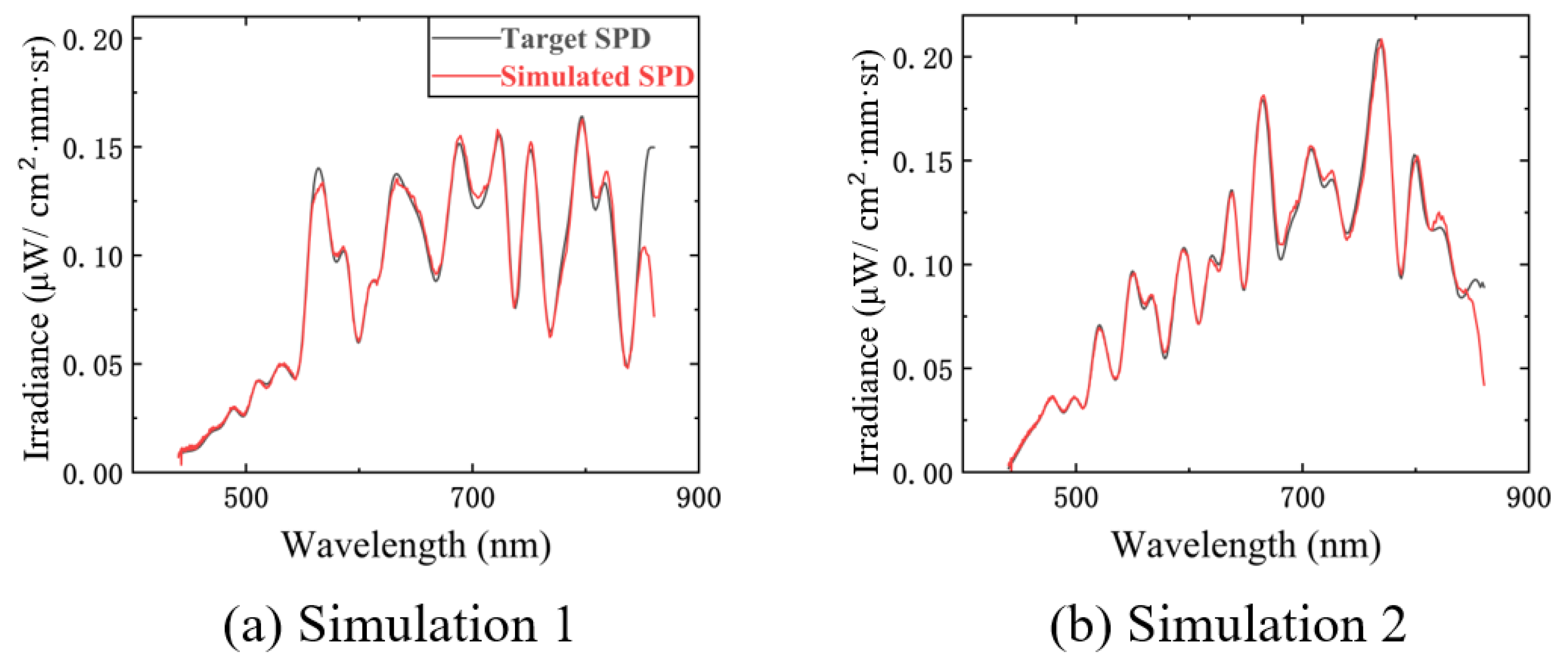
5.1. Simulation of Spectral Encoding
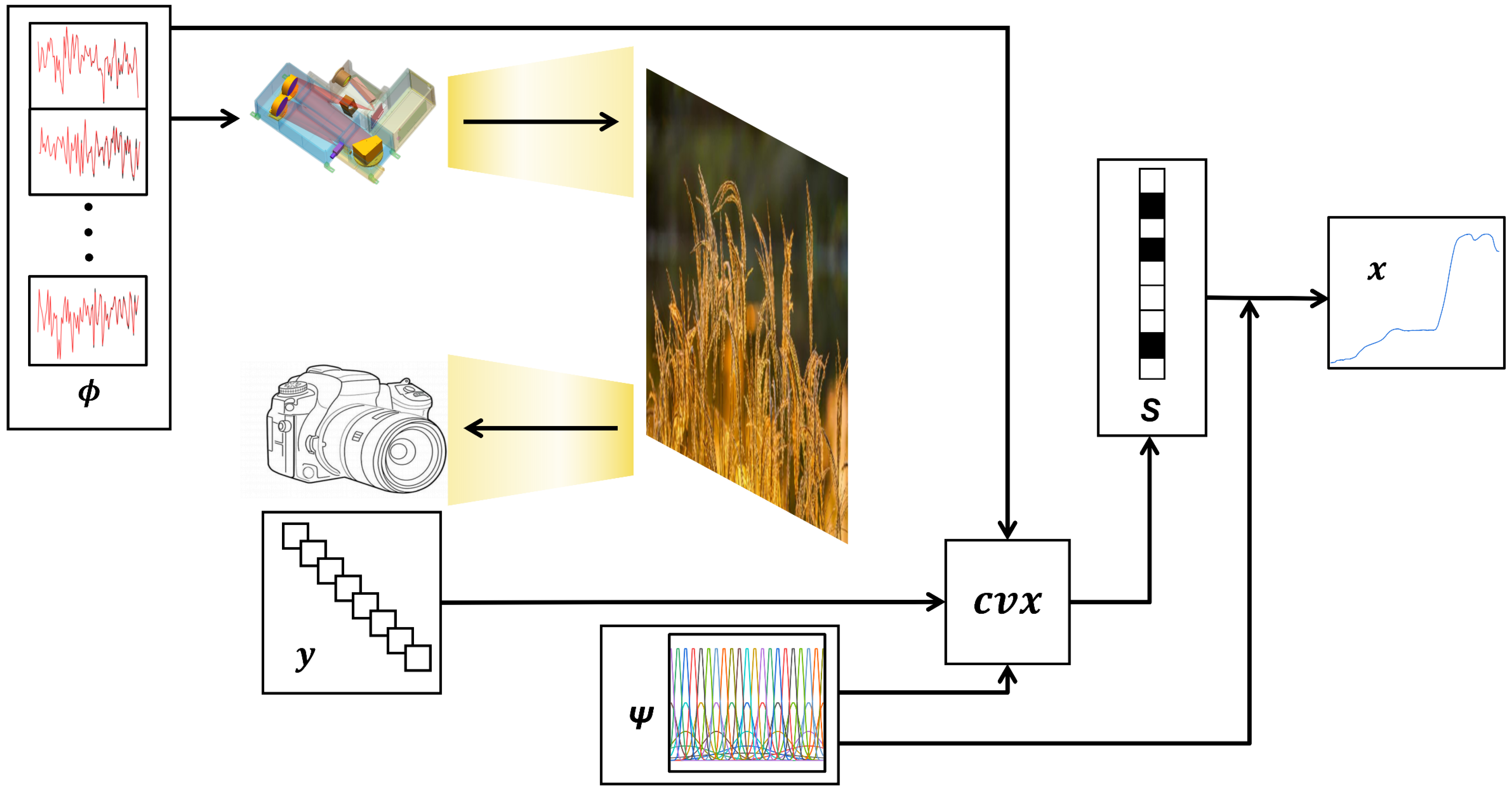
5.2. Spectral Measurement Based on Compressed Sensing
6. Validation Experiments
6.1. Experiments to Verify the Capability of Spectral Encoding Simulation
6.2. Experiments to Verify the Applicability of Compressed Sensing
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cao, X.; Zhou, F.; Xu, L.; Meng, D.; Xu, Z.; Paisley, J. Hyperspectral Image Classification with Markov Random Fields and a Convolutional Neural Network. IEEE Trans. Image Process. 2018, 27, 2354–2367. [Google Scholar] [CrossRef] [PubMed]
- Qi, B.; Zhao, C.; Youn, E.; Nansen, C. Use of weighting algorithms to improve traditional support vector machine based classifications of reflectance data. Opt. Express 2011, 19, 26816–26826. [Google Scholar] [CrossRef] [PubMed]
- Thuillier, G.; Zhu, P.; Snow, M.; Zhang, P.; Ye, X. Characteristics of solar-irradiance spectra from measurements, modeling, and theoretical approach. Light Sci. Appl. 2022, 11, 79. [Google Scholar] [CrossRef] [PubMed]
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.; Chanussot, J. Hyperspectral Remote Sensing Data Analysis and Future Challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- Gillis, D.B.; Bowles, J.H.; Montes, M.J.; Moses, W.J. Propagation of sensor noise in oceanic hyperspectral remote sensing. Opt. Express 2018, 26, A818–A831. [Google Scholar] [CrossRef] [PubMed]
- Loghmari, M.A.; Naceur, M.S.; Boussema, M.R. A Spectral and Spatial Source Separation of Multispectral Images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3659–3673. [Google Scholar] [CrossRef]
- Randeberg, L.L.; Kollias, N.; Baarstad, I.; Zeng, H.; Choi, B.; Løke, T.; Kaspersen, P.; Malek, R.S.; Wong, B.J.; Svaasand, L.O.; et al. Hyperspectral imaging of bruised skin. In Proceedings of the Photonic Therapeutics and Diagnostics II, San Jose, CA, USA, 21–26 January 2006. [Google Scholar]
- Nakariyakul, S.; Casasent, D.P. Fast feature selection algorithm for poultry skin tumor detection in hyperspectral data. J. Food Eng. 2009, 94, 358–365. [Google Scholar] [CrossRef]
- Stamatas, G.N.; Balas, C.; Kollias, N. Hyperspectral image acquisition and analysis of skin. In Proceedings of the Spectral Imaging: Instrumentation, Applications, And Analysis II, San Jose, CA, USA, 25–31 January 2003; pp. 77–82. [Google Scholar]
- Lam, A.; Sato, I. Spectral Modeling and Relighting of Reflective-Fluorescent Scenes. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1452–1459. [Google Scholar]
- Oh, S.W.; Brown, M.S.; Pollefeys, M.; Kim, S.J. Do It Yourself Hyperspectral Imaging with Everyday Digital Cameras. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2461–2469. [Google Scholar]
- Lam, A.; Subpa-Asa, A.; Sato, I.; Okabe, T.; Sato, Y. Spectral Imaging Using Basis Lights. In Proceedings of the 24th British Machine Vision Conference 2013, Bristol, UK, 9–13 September 2013; pp. 41.1–41.11. [Google Scholar]
- Park, J.I.; Lee, M.H.; Grossberg, M.D.; Nayar, S.K. Multispectral Imaging Using Multiplexed Illumination. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Chi, C.; Yoo, H.; Ben-Ezra, M. Multi-Spectral Imaging by Optimized Wide Band Illumination. Int. J. Comput. Vis. 2008, 86, 140–151. [Google Scholar] [CrossRef]
- Han, S.; Sato, I.; Okabe, T.; Sato, Y. Fast Spectral Reflectance Recovery Using DLP Projector. In Computer Vision. ACCV 2010; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 323–335. [Google Scholar]
- Zhang, W.; Song, H.; He, X.; Huang, L.; Zhang, X.; Zheng, J.; Shen, W.; Hao, X.; Liu, X. Deeply learned broadband encoding stochastic hyperspectral imaging. Light Sci. Appl. 2021, 10, 108. [Google Scholar] [CrossRef] [PubMed]
- MacKinnon, N.; Stange, U.; Lane, P.; MacAulay, C.; Quatrevalet, M. Spectrally programmable light engine for in vitro or in vivo molecular imaging and spectroscopy. Appl. Opt. 2005, 44, 2033–2040. [Google Scholar] [CrossRef] [PubMed]
- Chuang, C.H.; Lo, Y.L. Digital programmable light spectrum synthesis system using a digital micromirror device. Appl. Opt. 2006, 45, 8308–8314. [Google Scholar] [CrossRef] [PubMed]
- Luo, D.; Taphanel, M.; Längle, T.; Beyerer, J. Programmable light source based on an echellogram of a supercontinuum laser. Appl. Opt. 2017, 56, 2359–2367. [Google Scholar] [CrossRef] [PubMed]
- Hornbeck, L.J.; Rice, J.P.; Douglass, M.R.; Neira, J.E.; Kehoe, M.; Swanson, R. DMD diffraction measurements to support design of projectors for test and evaluation of multispectral and hyperspectral imaging sensors. In Proceedings of the Emerging Digital Micromirror Device Based Systems and Applications, San Jose, CA, USA, 24–29 January 2009. [Google Scholar]
- Hirai, K.; Irie, D.; Horiuchi, T. Multi-primary image projector using programmable spectral light source. J. Soc. Inf. Disp. 2016, 24, 144–153. [Google Scholar] [CrossRef]
- Xu, D.; Sun, G.; Zhang, G.; Zhang, Y.; Wang, L.; Liu, S.; Zhong, J.; Liang, S.; Yang, J. Design of a digital tunable stellar spectrum calibration source based on a digital micromirror device. Measurement 2022, 191, 110651. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, X.; Wu, H.; Mo, J.; Wen, K.; Wang, S.; Gao, Y.; Wang, Y. Multiwavelength switchable fiber laser employing a DMD as tuning element and variable optical attenuator. Opt. Laser Technol. 2021, 142, 107276. [Google Scholar] [CrossRef]
- Wang, X.; Li, Z. A spectrally tunable calibration source using Ebert-Fastie configuration. Meas. Sci. Technol. 2018, 29, 035903. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, G.; Zhang, J.; Xu, D.; Chong, W.; Sun, J. An indoor calibration light source of the transmissometers based on spatial light modulation. Optoelectron. Lett. 2022, 18, 65–71. [Google Scholar] [CrossRef]
- Li, Z.; Wang, X.; Zheng, Y.; Li, F. Absolute detector-based spectrally tunable radiant source using digital micromirror device and supercontinuum fiber laser. Appl. Opt. 2017, 56, 5073–5079. [Google Scholar] [CrossRef] [PubMed]
- Michael, G.; Stephen, B. CVX: Matlab Software for Disciplined Convex Programming, Version 2.0 Beta. Available online: http://cvxr.com/cvx (accessed on 15 July 2021).
- Grant, M.C.; Boyd, S.P. Graph Implementations for Nonsmooth Convex Programs. In Recent Advances in Learning and Control; Lecture Notes in Control and Information Sciences; Springer: London, UK, 2008; Volume 371, pp. 95–110. [Google Scholar]
- Fu, Y.; Zou, Y.; Zheng, Y.; Huang, H. Spectral reflectance recovery using optimal illuminations. Opt. Express 2019, 27, 30502–30516. [Google Scholar] [CrossRef] [PubMed]
- Kokaly, R.F.; Clark, R.N.; Swayze, G.A.; Livo, K.E.; Hoefen, T.M.; Pearson, N.C.; Wise, R.A.; Benzel, W.M.; Lowers, H.A.; Driscoll, R.L.; et al. USGS Spectral Library Version 7 Data: U.S. Geological Survey Data Release; USGS: Reston, VA, USA, 2017. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
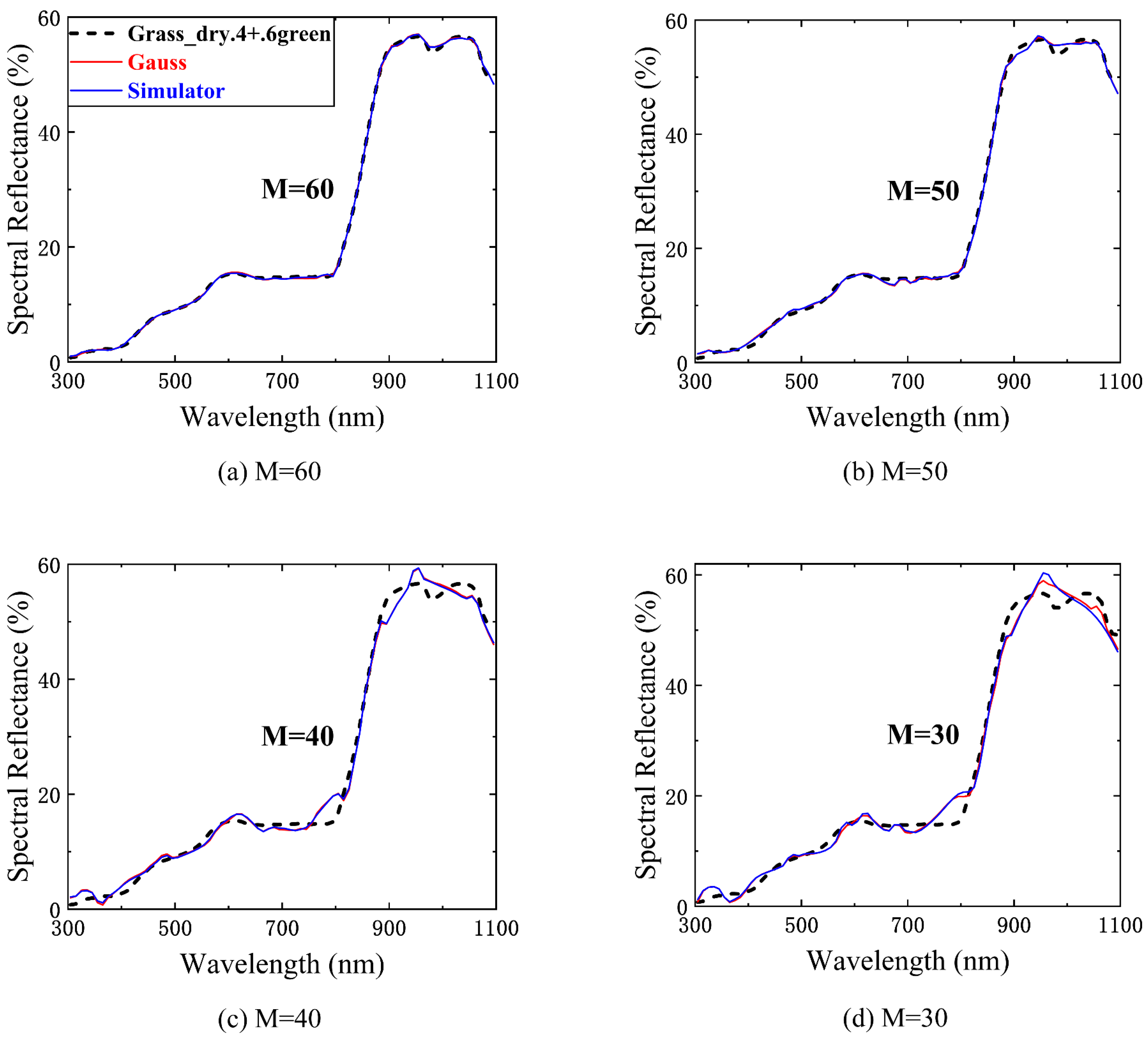
| M | RMSE of Gauss (%) | RMSE of SES (%) |
|---|---|---|
| 80 | 0.181 | 0.185 |
| 70 | 0.232 | 0.211 |
| 60 | 0.29 | 0.275 |
| 50 | 0.599 | 0.619 |
| 40 | 1.636 | 1.584 |
| 30 | 1.773 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, P.; Wang, X.; Zhang, Z.; Gu, G.; Li, J.; Wu, H.; He, L.; Lin, G. A Spectral Encoding Simulator for Broadband Active Illumination and Reconstruction-Based Spectral Measurement. Sensors 2023, 23, 4608. https://doi.org/10.3390/s23104608
Jiang P, Wang X, Zhang Z, Gu G, Li J, Wu H, He L, Lin G. A Spectral Encoding Simulator for Broadband Active Illumination and Reconstruction-Based Spectral Measurement. Sensors. 2023; 23(10):4608. https://doi.org/10.3390/s23104608
Chicago/Turabian StyleJiang, Peng, Xiaoxu Wang, Zihui Zhang, Guochao Gu, Jifeng Li, Heng Wu, Limin He, and Guanyu Lin. 2023. "A Spectral Encoding Simulator for Broadband Active Illumination and Reconstruction-Based Spectral Measurement" Sensors 23, no. 10: 4608. https://doi.org/10.3390/s23104608